单目机器人障碍物检测研究
基于单目视觉的障碍物定位和测量
基于单目视觉的障碍物定位和测量王振;王化明【摘要】障碍物定位与测量是智能移动机器人自主运动的核心问题之一。
研究了一种结合障碍物色彩属性和接触边缘属性的算法,通过单个视觉传感器实现平坦路面中障碍物的定位和测量。
该算法以图像中已知路面范围的外观属性为基准对图像进行初步处理,依据障碍物和地面接触边缘属性对障碍物进行初步定位,在障碍物上选择区域,以该区域外观属性为基准对图像进行二次处理,得到障碍物在图像中占据范围,结合视觉传感器成像原理,对障碍物位置和尺寸进行标定和测量。
以轮式移动机器人为实验平台,验证所提算法的可行性和精度,最终测得其定位误差为1.6%,测量误差为1.5%。
%Obstacle detection and measurement is one of the key problems for the autonomous movement of intel igent mobile robot. This paper presents an algorithm based on the combination of the appearance and the contact edge which is used to detect and measure the obstacle on the flat surface using single visual sensor. In the algorithm the image is primary handled according to the ap ̄pearance property of known ground surface and the obstacle position defected according to the edge property of the contact area be ̄tween obstacle and ground, then the reference area on the obstacle is seleted and the image is handled again according to the ap ̄pearance property of the obstacle to get the position of the obstacle in the image,final y the obstacle detection and measurement are finished according to the principle of visual sensor. The effectiveness and accuracy of the algorithm is tested and verified on awheeled mobile robot,the error of detection algorithm is about 5 %,while the error of measurement algorithm is about 1.89 %.【期刊名称】《机械制造与自动化》【年(卷),期】2015(000)001【总页数】4页(P198-201)【关键词】单目视觉;外观属性;高度测量【作者】王振;王化明【作者单位】南京航空航天大学,江苏南京210016;南京航空航天大学,江苏南京210016【正文语种】中文【中图分类】TP242.6障碍物定位是实现移动机器人智能运动的关键问题。
《复杂环境下单目3D目标检测研究》范文

《复杂环境下单目3D目标检测研究》篇一一、引言随着自动驾驶、机器人视觉和增强现实等领域的快速发展,单目3D目标检测技术成为了计算机视觉领域的研究热点。
然而,在复杂环境下,如光照变化、动态背景、多目标干扰等场景中,单目3D目标检测的准确性和实时性面临极大的挑战。
本文针对这一研究难题,通过深度学习算法,研究复杂环境下单目3D目标检测的关键技术和挑战。
二、复杂环境下的单目3D目标检测概述单目3D目标检测是利用单个相机捕获的图像信息,对目标物体进行三维空间定位和识别。
在复杂环境下,由于光照、遮挡、动态背景等因素的影响,单目3D目标检测的准确性和稳定性受到了极大的影响。
因此,如何提高单目3D目标检测的鲁棒性和准确性成为了当前研究的重点。
三、关键技术研究1. 数据集构建针对复杂环境下的单目3D目标检测,需要构建大规模、多样化的数据集。
数据集应包含不同光照、遮挡、动态背景等场景下的图像数据,以便训练模型更好地适应各种复杂环境。
同时,数据标注应准确、全面,包括目标物体的类别、位置、尺寸等信息。
2. 深度学习算法优化深度学习算法是单目3D目标检测的核心技术。
针对复杂环境下的挑战,需要优化深度学习算法,提高模型的鲁棒性和准确性。
具体而言,可以采用改进的卷积神经网络结构、引入注意力机制、使用多尺度特征融合等方法,提高模型对复杂环境的适应能力。
3. 目标检测与三维重建融合单目3D目标检测需要将目标检测和三维重建两个任务进行融合。
通过深度学习算法,将图像中的目标物体进行准确检测和定位,然后利用三维重建技术,对目标物体进行三维空间定位和重建。
这一过程需要解决多任务学习的优化问题,以及如何将两个任务进行有效的融合。
四、挑战与解决方案1. 光照变化光照变化是复杂环境下单目3D目标检测的主要挑战之一。
为了解决这一问题,可以通过改进模型对光照变化的适应性,采用多尺度特征融合、光照归一化等方法,提高模型在不同光照条件下的鲁棒性。
2. 遮挡与动态背景遮挡和动态背景是单目3D目标检测的另一个难点。
无人机图像识别与障碍物检测技术研究

无人机图像识别与障碍物检测技术研究随着无人机技术的不断发展,越来越多的领域开始应用无人机技术。
其中,无人机图像识别和障碍物检测技术是无人机领域中的重要研究方向之一。
一、无人机图像识别无人机图像识别是利用机载相机采集到的图像进行特定物体的识别和分类。
目前,无人机图像识别主要用于军事领域的目标侦察、敌情监视和报告,以及民用领域的地质勘察、水文监测等。
在无人机图像识别技术中,首先要实现的是图像采集。
随着多光谱传感器技术的发展,无人机可以搭载多种相机,获取多光谱信息和高精度的三维图像。
这些高质量的数据为后续的图像处理和识别提供了广阔的空间。
对于无人机图像识别技术中的图像处理,主要有以下两个方面。
第一方面是图像分割,即将图像中的目标从背景中分割出来。
采用的方法有传统的基于阈值分割、有监督学习和无监督学习的方法,以及新兴的深度学习方法。
第二方面是特征提取,即从分割出来的目标中提取出有用的特征。
目前主流的方法是基于卷积神经网络(CNN)的深度学习方法。
通过使用CNN,可以自动学习特征,识别图像中各种目标。
二、障碍物检测障碍物检测是保证无人机安全飞行的关键技术之一。
它能够帮助无人机识别周围环境中的障碍物,从而避免潜在的碰撞风险。
在飞行中,无人机需要通过传感器获取周围环境信息,进行实时判断并做出相应的调整。
障碍物检测主要基于雷达和视觉方法。
其中,雷达技术是目前较为成熟的方法之一,它可以通过探测物体的回波信号,对物体的形状、尺寸等进行分析,并提供物体深度信息。
这种方法对于夜间或一些恶劣环境下的无人机飞行较为适用。
但是雷达技术也有其局限性,因为它不能提供物体的纹理、颜色等信息。
与雷达技术不同,视觉方法主要利用无人机的相机对周围环境进行检测。
该方法主要分为两类:基于单目相机和基于多目相机。
在单目相机中,只有一个相机获取环境信息。
该方法简单,但是对于障碍物的检测范围较小。
而在多目相机中,通过相机组合的方法,可以获取更为丰富的环境信息。
基于单目仿人机器人的障碍物测距方法
值分离 目标和背景. HS V 颜色空间模 型是一种直观 的
这种方法 虽然能够融合 单 目和 双 目测距 的优 点,但减 少 了允许 的图像视差, 文献 【 6 】 通过检测 目标 的模糊度 来计算 目标距离虽 然算法简单, 但 是模糊度 的检测依
也越来越 深入,视觉导航 已变 成了导航技术 的一个研 究 热 点【 l 】 ,视 觉导 航 的优 点在 于 具有 很高 的 分辨 率 , 探测范 围广 、 精度高, 获取信息量大, 这对 自主移动机 器 人及智 能车辆导 航具有重 要的意义 [ 2 1 .目前 基于视 觉 的距 离信息提取方法主要有 单 目视觉 、双 目视觉 和 全 景视觉,全景视觉和双 目视觉虽然可 以获得 图像 深 度 信息,但 是需要精确 的配准,耗 时的配准 过程难 以
Ke y wo r d s : Mo n o c u l a r ; r a n g i n g ; o b s ac t l e d e t e c t i o n ; r o ot b ; HS V c o l o r s p a c e
随着移 动机 器人技术 的发展,对导航技术 的研究
o b s t a c l e . F i r s t l y i t c o n v e ys he t R GB i ma g e wh i c h i s o b t a i n e d f r o m he t r o b o t t o HS V i ma g e , he t n d e t e c t s nd a i d e n t i i f e s
基于单目视觉的室内机器人障碍检测方案
基于单目视觉的室内机器人障碍检测方案何少佳;刘子扬;史剑清【摘要】In this paper, a new monocular vision system was proposed to improve obstacle detection capability of indoor mobile robot. In this system, firstly, the Hue, Saturation, Intensity (HSI) color space conversion of images was performed. Secondly, a small target threshold selection method was proposed to segment the images, which enhanced the precision of the image segmentation. Thirdly, the target scene matching method and target projection matching method were used to calculate the change of the target pixel and projection so as to judge whether the target is obstacles or ground graphs. The experimental results show that the monocular vision system is effective and feasible, and this system can be applied to the navigation for small indoor mobile robots.%为提高室内移动机器人障碍物检测能力,提出了一套基于单目视觉的检测方案.该方案首先对拍摄的图像进行色度、饱和度、亮度(HSI)颜色空间转换;然后,针对室内图像中目标和背景的分割,提出了小目标阈值选取法,提高了特定环境下图像分割的准确性;最后,用目标场景匹配法和目标投影匹配法相结合,计算分割后目标像素的变化和投影的变化,从而判别出目标是具有高度的障碍物还是地面图形.实验结果表明该方案的有效性和可行性,可为室内小型移动机器人提供良好的导航信息.【期刊名称】《计算机应用》【年(卷),期】2012(032)009【总页数】4页(P2556-2559)【关键词】单目视觉;障碍物检测;图像分割;透视投影;摄像机标定【作者】何少佳;刘子扬;史剑清【作者单位】桂林电子科技大学机电工程学院,广西桂林541004;桂林电子科技大学机电工程学院,广西桂林541004;桂林电子科技大学机电工程学院,广西桂林541004【正文语种】中文【中图分类】TP391.410 引言障碍物的检测在移动机器人自主导航中占有十分重要的位置,从单一化的传感器应用到多传感器融合,国内外学者提出了许多障碍物的检测方法。
基于单目测距技术的道路障碍物检测方法
0引言
随着科技 的进 步和汽车工业 的发展 ,基于计 算机视觉 的智
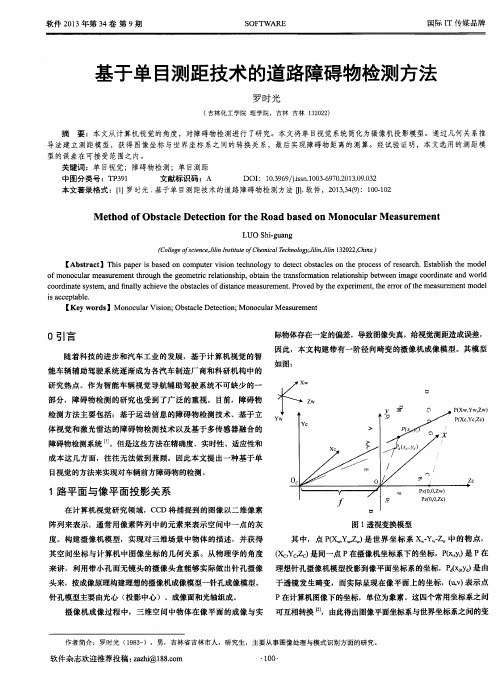
际物体存在一定的偏差,导致图像失真 ,给视觉测距造成误差 , 因此,本文构建 带有一阶径向畸变的摄像机成像模型 。其模型
如图:
能车辆辅助驾驶 系统逐渐成为各汽车制造厂 商和科 研机构中的 研究热点 。作为智能 车辆视觉导航辅助驾驶 系统 不可缺少的一 部分 ,障碍物检 测的研究也受 到了广泛的重视 。目前,障碍物
图1 透视变换模型
P z ( O , 0 , z c )
) 是世界 坐标 系 - Y w — z w 中 的物 点,
X c , Y c , z 。 ) 是同一点 P在摄像机坐标系下的坐标 ,P ( ) 【 i , Y t ) 是 P在 其空 间坐标 与计算机中 图像坐标 的几何 关系。从物 理学的角度 (
[ A b s t r a c t ]T h i s p a p e r i s b a s e d o n c o mp u t e r v i s i o n t e c h n o l o g y t o d e t e c t o b s t a c l e s o n t h e p r o c e s s o f r e s e a r c h . E s t a b l i s h t h e mo d e l
o f mo n o c u l a r me a s u r e me n t hr t o u g h he t g e o me t r i c r e l a t i o n s h i p , o b t a i n he t t r a n s f o r ma t i o n r e l a t i o n s h i p b e t we e n i ma g e c o o r d i n a t e a n d wo ld r c o o r d i n a t e s y s t e m, a n d in f a l l y a c h i e v e he t o b s t a c l e s o f d i s t nc a e me a s u r e me n t . P r o v e d b y he t e x p e r i me n t , t h e e r r o r o f t h e me a s re u me n t mo d e l
机器人视觉导航中的障碍物检测与避障技术研究

机器人视觉导航中的障碍物检测与避障技术研究随着人工智能和机器人技术的发展,机器人在各个领域中扮演着越来越重要的角色。
在机器人的自主导航中,障碍物检测与避障技术是至关重要的环节。
本文将探讨机器人视觉导航中的障碍物检测与避障技术的研究进展。
一、障碍物检测技术障碍物检测是机器人实现自主导航的关键步骤之一。
在过去的几十年里,学术界和工业界已经提出了许多障碍物检测方法。
其中,基于视觉的障碍物检测技术是最为常用和有效的方法之一。
1. 目标检测算法目标检测算法是障碍物检测中的核心技术之一。
近年来,深度学习方法的发展使得目标检测算法取得了显著的突破。
基于深度学习的目标检测算法如YOLO、Faster R-CNN和SSD 等已经在机器人障碍物检测中取得了良好的效果。
这些算法可以快速准确地检测出图像中的障碍物,并生成对应的边界框或者像素级别的遮罩。
2. 点云处理除了图像,机器人还可以通过激光雷达等传感器获取环境的三维点云信息,从而进行更准确的障碍物检测。
点云处理技术可以将点云数据转化为有用的信息,例如地面分割、物体分割和物体识别等。
基于点云处理的障碍物检测方法在机器人导航中也取得了一定的成功。
3. 智能传感器随着传感器技术的发展,越来越多的智能传感器被应用于机器人的障碍物检测中。
例如,具有深度感知能力的相机、声纳和毫米波雷达等,可以提供更丰富的环境信息,从而改善障碍物的检测和识别能力。
二、避障技术在机器人导航中,障碍物检测仅仅是解决问题的一部分,机器人还需要相应的避障策略来实现安全、高效的导航。
1. 路径规划算法路径规划算法是机器人避障的关键技术之一。
传统的路径规划算法如A*、Dijkstra和RRT等已经被广泛应用于机器人导航领域。
近年来,基于深度学习的路径规划算法也取得了一定的研究进展。
这些算法可以通过学习大量样本来获取更高效准确的路径规划策略。
2. 避障决策一旦检测到障碍物,机器人需要进行相应的决策来规避障碍物。
《2024年复杂环境下单目3D目标检测研究》范文
《复杂环境下单目3D目标检测研究》篇一一、引言随着自动驾驶、机器人技术和计算机视觉的飞速发展,3D目标检测技术成为了当前研究的热点。
其中,单目3D目标检测技术因其低成本和广泛应用场景而备受关注。
然而,在复杂环境下,如光照变化、动态背景、遮挡等条件下,单目3D目标检测面临着诸多挑战。
本文旨在研究复杂环境下单目3D目标检测的算法和技术,以提高其准确性和鲁棒性。
二、背景与意义单目3D目标检测技术是通过单个摄像头获取的图像信息来估计目标物体的三维空间位置、姿态和尺寸等信息。
该技术在自动驾驶、机器人导航、安防监控等领域具有广泛的应用前景。
然而,在复杂环境下,由于光照、背景等因素的影响,单目3D目标检测的准确性和鲁棒性往往受到挑战。
因此,研究复杂环境下单目3D目标检测技术对于提高智能系统的感知能力和自主决策能力具有重要意义。
三、相关技术与文献综述近年来,单目3D目标检测技术得到了广泛的研究和关注。
早期的方法主要基于传统的计算机视觉技术,如特征提取、模板匹配等。
随着深度学习技术的发展,基于深度学习的单目3D目标检测方法逐渐成为主流。
这些方法通过大量的训练数据和复杂的网络结构来提高检测的准确性。
然而,在复杂环境下,这些方法仍面临着诸多挑战。
目前,研究者们正尝试通过改进网络结构、引入新的约束条件、优化算法等方式来提高单目3D目标检测的性能。
四、研究内容与方法本文的研究内容主要围绕复杂环境下单目3D目标检测算法进行。
首先,通过分析现有算法的优缺点,确定本文的研究重点和方法。
其次,设计一种基于深度学习的单目3D目标检测算法,并针对复杂环境下的挑战进行改进和优化。
具体方法包括:1. 数据集准备:收集和整理包含复杂环境的单目3D目标检测数据集,用于模型的训练和测试。
2. 算法设计:设计一种基于深度学习的单目3D目标检测算法,包括特征提取、目标定位和三维空间位置估计等模块。
3. 改进与优化:针对复杂环境下的挑战,如光照变化、动态背景、遮挡等,对算法进行改进和优化,提高其准确性和鲁棒性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
万方数据 万方数据 万方数据916浙江大学学报(工学版)第42卷取上下两块区域深度的平均值作为该区域的平均深度.在区域划分足够细的情况下,为了防止噪声的干扰,可以再增加区域在行上的深度梯度约束.1.5整体算法流程整体算法流程可归纳如下4个部分:1)输入图像序列,提取Harris角点并用KLT算法进行跟踪,得到在图像序列中都可见的特征点;2)根据这些特征点在各帧图像中的坐标组成W矩阵,使用改进的因子分解法得到场景的投影重建;3)在满足DAQ约束的自标定的基础上得到场景的欧氏重建以及摄像机运动;4)划分图像区域,通过深度信息来确定为障碍物或者背景.2试验结果为了验证所提出障碍物检测算法的有效性,本文进行了真实的室外场景实验.采用图像序列分辨率为720×576,共计400帧.为了获得比较精确的摄像机实际位移以及防止因子分解法的累积计算量过大,以40帧为单位划分原图像序列,得到10个子序列,对于每个子序列,每隔4帧抽出一帧,采样过后的10帧进行障碍物检测.以其中的一个子序列(200~239帧)为例,图2给出了采样过后该子序列的第一帧和最后一帧(即原序列的第200帧和236帧).(a)第200帧(b)第236帧图2子序列中的第一帧和最后一帧Fig.2Firstandlastframeinsubsequence本文首先选取并匹配特征点共1500个(如图3所示),然后用因子分解法得到场景的投影重建(如图4所示).通过满足DAQ约束的自标定求得DAQ为n’=91OOO000.00030.00241.03671.1209O.00910.06641.12091.2166进而得到场景的欧氏重建(如图5所示).可以看出欧氏重建真实地反映了特征点在世界坐标系中的位置以及摄像的运动(位于欧氏重建三维图的底部的(a)第200帧(b)第236帧图3特征点选取与匹配Fig.3FeaturepointsdetectingandtrackingO.5图4场景的投影重建三维图Fig.4Projectivereconstructionof20l5105O图5场景的欧氏重建三维图Fig.5Euclideanreconstructionof小坐标系代表了运动中摄像机光心的位置).最后,将该子序列中的每一帧图像划分为35×28个20像素×20像素的子区域(图像左右各空出10像素,上面空出16像素作为边界),计算区域深度以及深度梯度,取阈值r,=8,r。
=0.3,r。
一4,确定障碍物区域,并用黑色块进行标记如图6所示.图7以起始帧、中间一帧和最后一帧为代表,反映了基于整个图像序列(400帧)由远而近的障碍物检测效果.(a)第200帧(b)第236帧图6确定并标记障碍物区域Fig.6Obstacleconfirmingandlabeling—y4626叭∞∞OOO万方数据第6期杜歆,等:基于单目视觉的障碍物检测917(a)图像序列(b)检测结果图7障碍物检测效果Fig.7Detectingeffectofobstacle3结语基于单目视觉的障碍物检测方法首先由因子分解法得到场景的投影结构,由自标定升级至欧氏重建,再根据欧氏重建得到的深度信息来检测出图像序列中的障碍物.针对真实的室外场景图像的试验结果表明在一定的检测距离内,该方法能够在室外环境下获得比较好的障碍物检测效果.参考文献(References):[1]cHENGG,ZELINSKYA.Goal—orientatedbehavior-basedvisualnavigation[C]∥ProceedingsofIEEEInter-nationalConfe-renceRoboticsandAutomation(ICRA98).Leuven,Belgium:[s.n.],1998:3431—3436.[23OHYAA.K()SAKAA,KAK八Vision-basednavigationofmobilerobotswithobstacleavoidancebysinglecameravi—sionandultrasonicsensingrJ].IEEETransactionsRo-boticsandAutomation.1998,14(6):969—978.[3]NELSONRC,AI。
OIMONOSJ.Obstacleavoidancesingflowfielddivergence[J].IEEETransactionsPatternAnalysisandMachineIntelligence,1989’11(10):1102一1106.[4]LOWT,wYETHG.ObstacleDetectionusingOpticalFlow[C]∥Proceedingofthe2005AustralianConferenceRoboticsandAutomation.Sydney,Australia:[s.n.],2005.[5]WILLIAMSONT。
THORPEC.ASpecializedmulti—baselinestereotechniqueforobstacledetection[c]∥ProceedingsofIEEEConferenceComputerVisionandPatternRecognition.SantaBarbara,USA:IEEECorn-puterSociety,1998:238—244.[6]BERT()ZZIM,BROGGIA,FASCIOLI九Avisionsystemforreal—timeautomotiveobstacledetection[C]∥ProceedingsofIEEEConferenceImageProcessing.Lau—sanne,Switzerland:Is.rL],1996,2:681—684.[7]TOMASIC,KANADET.Shapeandmotionfromim—agestreamsunderorthography:afactorizationmethod[J].InternationalJournalofComputerVision,1992,9(2):137—154.[8]POEI,MANC,KANADET.Aparaperspectivefactori-zationmethodforshapeandmotionrecovery[J].IEEETransactionsPatternAnalysisandMachineIntelli—gence,1997,19(3):206—218.[93TRIGGSB.FactorizationMethodsforprojectivetureandmotion[C]∥ProceedingsofIEEEConferenceComputerVisionandPatternRecognition.WashingtonDC,USA:IEEEComputerSociety,1996:845—851.[10]STURMP,TRIGGS&Afactorizationbasedalgorithmformulti—imageprojectivestructureandmotion[C]∥Eu-roll.anConferenceComputerVision.Cambridge,UK:IEEEComputerSociety,1996:709—720.[11]MAHAMUDS,HEBERTM,OMORIY,eta1.Provably-convergentiterativemethodsforprojectivestructurefrommotion[C]∥IEEEConferenceCom—puterVisionandPatternRecognition,Hawaii,USA:IEEEComputerSociety,2001,1:1018—1021.[123HARRISC。
STEPHENSM.Acombinedcomerandedgedetector[c]∥ProceedingsFourthAIveyVisionConference.Manchester,UK:s.n],1988:147—151.[13]LUCASBD,KANADET.Aniterativeimageregis-trationtechniquewithapplicationvision[c]∥Proceedingsofthe7thInternationalJointConfer-ArtificialIntelligence.Vancouver:s.n.],1981:674—679.[14]SHIJ,TOMASHIC.Goodfeaturetotrack[c]∥Pro-ceedingsofIEEEConferenceComputerVisionandPatternRecognition.Seattle,Washington,USA:s.n.],1994,2:593—600.[153HARTLEYRI.InDefenceofthe8-pointalgorithm[C]∥ProceedingsoftheIEEEInternationalConferenceComputerVision.Cambridge,UK:IEEEComputerSociety,1995:1064—1070.[16]POLLEFEYSM,VERBIESTF,GOOLLV.Survi—vingdominantplanesinuncalibratedstructureandmo—tionrecovery[C]∥EuropeanConferenceComputerVision.Copenhagen,Denmark:SpringerPublishingCompany,2002:837—851.[17]TRIGGSB.Autocalibrationandtheabsolutequadric[c]∥IEEEConferenceComputerVisionandPatternRecognition.PuertoRico:IEEEComputerSoc,1997:609—6】4. 万方数据基于单目视觉的障碍物检测作者:杜歆, 周围, 朱云芳, 刘济林, DU Xin, ZHOU Wei, ZHU Yun-fang, LIU Ji-lin作者单位:杜歆,周围,刘济林,DU Xin,ZHOU Wei,LIU Ji-lin(浙江大学,信息与通信工程研究所,浙江,杭州,310027), 朱云芳,ZHU Yun-fang(浙江工商大学,计算机与信息工程学院,浙江,杭州,310035)刊名:浙江大学学报(工学版)英文刊名:JOURNAL OF ZHEJIANG UNIVERSITY(ENGINEERING SCIENCE)年,卷(期):2008,42(6)被引用次数:2次1.POLLEFEYS M;VERBIEST F;GOOL L V Surviving dominant planes in uncalibrated structure and motion recovery 20022.HARTLEY R I In Defence of the 8-point algorithm 19953.SHI J;TOMASHI C Good feature to track 19944.TRIGGS B Factorization Methods for projective structure and motion 19965.POELMAN C;KANADE T A paraperspective factorization method for shape and motion recovery[外文期刊] 1997(03)6.TOMASI C;KANADE T Shape and motion from image streams under orthography:a factorization method[外文期刊] 1992(02)7.BERTOZZI M;BROGGI A;FASCIOLI A A stereo vision system for real time automotive obstacle detection 19968.WILLIAMSON T;THORPE C A Specialized multibaseline stereo technique for obstacle detection 19989.LOW T;WYETH G Obstacle Detection using Optical Flow 200510.NELSON R C;ALOIMONOS J Obstacle avoidance using flow field divergence[外文期刊] 1989(10)11.OHYA A;KOSAKA A;KAK A Vision-based navigation of mobile robots with obstacle avoidance by single camera vision and ultrasonic sensing[外文期刊] 1998(06)12.TRIGGS B Autocalibration and the absolute quadric 199713.LUCAS B D;KANADE T An iterative image registration technique with an application to stereo vision 198114.HARRIS C;STEPHENS M A combined corner and edge detector 198815.MAHAMUD S;HEBERT M;OMORI Y Provably convergent iterative methods for projective structure from motion 200116.STURM P;TRIGGS B A factorization based algorithm for multi image projective structure and motion 199617.CHENG G;ZELINSKY A Goal orientated behavior-based visual navigation 19981.丁幼春.王书茂.陈红农用车辆作业环境障碍物检测方法[期刊论文]-农业机械学报 2009(z1)2.李晶.程伟扰动测量环境中基于图像序列的模态参数识别[期刊论文]-北京航空航天大学学报 2009(9)本文链接:/Periodical_zjdxxb-gx200806003.aspx。