高程控制网平差计算程序
测量误差与数据处理(3)
(3)根据改正数方程,可求得改正数为:
V P1ATK
0.5 1.0
1 1
4.8
1 2.4 2.4
0.5 1
4.8
(4)由此得高差的平差值为:
hˆ hV
即:
1.004 4.8
0.9992
1.504
2.4
103
1.5064
2.512 4.8
2.5072
h 1 0 .99 m , h 9 2 1 2 .50 m , h 6 3 2 4 .50 m 7
示例的解算
解:(1)此例n = 3,t = 2,故r = 1,列出 如下平差值条件方程:
H A h ˆ 1 h ˆ 2 h ˆ 3 H B 0
以代入上式,可得条件方程为:
v 1 v 2 v 3 ( H A h 1 h 2 h 3 H B ) 0
将已知高程和观测高差代入计算闭合差( 单位mm),然后用矩阵表示如下:
1. 根据平差的具体问题,确定条件方程的个 数,列出条件方程式,条件方程的个数等于 多余观测数r;
条件方程
➢平差值条件方程:
a1 Lˆ1
a 2 Lˆ 2
a n Lˆ n
a0
0
b1 Lˆ1
b 2 Lˆ 2
b n Lˆ n
b0
0
r1 Lˆ1
r2 Lˆ 2
rn Lˆ n
r0
0
➢改正数条件方程:
0 0 p
n
1
p1
0 1 0
p2
0 0 1
pn
基于闭合差条件的条件平差
❖条件平差原理 ➢ 由于高程控制网中存在r个多余观测,就会产生r 条件方程。
➢高程控制网平差归结为以r个条件方程为基础,根 据最小二乘法求出一组高差改正数。
平差软件计算说明

由观测数据到平差成果用平差易做控制网平差的过程第一步:控制网数据录入第二步:坐标推算第三步:坐标概算第四步:选择计算方案第五步:闭合差计算与检核第六步:平差计算第七步:平差报告的生成和输出作业流程图:向导式平差向导即是按照应用程序的文字提示一步一步操作下去,最终达到应用目的。
PA2005提供了向导式平差,根据向导的中文提示点击相应的信息即可完成全部的操作。
它对PA2005的初学者有着极大的帮助,建议PA2005的初学者先应用向导来熟悉PA2005数据处理的全部操作过程。
本平差向导只适用于对已经编辑好的平差数据文件进行平差。
向导式平差的应用向导式平差需要事先编辑好数据文件,这里我们就以demo中的“边角网4.txt”文件为例来说明。
第一步:进入平差向导首先启动“南方平差易2005”,然后用鼠标点击下拉菜单“文件\平差向导”。
如下图“平差向导”所示:平差向导请注意平差向导的中文提示和应用说明,并依据提示进行。
第二步:选择平差数据文件点击“下一步”进入平差数据文件的选择页面。
如下图“选择平差数据”所示:选择平差数据点击“浏览”来选择要平差的数据文件。
所选择的对象必须是已经编辑好的平差数据文件,如PA2005的Demo中“边角网4”。
对于数据文件的建立,PA2005 提供了两种方式,一是启动系统后,在指定表格中手工输入数据,然后点击“文件\保存”生成数据文件;二是依照附录A中文件格式,在Windows的“记事本”里手工编辑生成。
打开数据文件点击“打开”即可调入该数据文件。
如下图“调入平差数据文件”所示:调入平差数据文件第三步:控制网属性设置调入平差数据后点击“下一步”即可进入控制网属性设置界面,如下图:该功能将自动调入平差数据文件中控制网的设置参数,如果数据文件中没有设置参数则此对话框为空,同时也可对控制网属性进行添加和修改,向导处理完后该属性将自动保存在平差数据文件中。
点击“下一步”进入计算方案的设置界面。
高程控制网计算和平差概要

ˆ h P1 1 0 0 0 h H A 1 2 ˆ h 2 s 1 0 0 0 H B h1 2 ˆ ˆ H s6 1 X 6 h3 0 s1 0 h0 1 A h ˆ ˆ 0 0 1 P1 X 2 0 B 4 A 2 ˆ h ˆ h 0 0 1 0 H X B 8 3 s 5 h7 s 3 h s 3 ˆ 0 ˆ s5 1 1 7 0 0 8 X h 4 6h 5 0 0 1 1 0 ˆ h 7 0 1 0 s 4 1 P 4 0 ˆ P3 h4 h8
昆明冶金高等专科学校测绘学院
列出各误差值方程:
ˆ X ˆ H h 1 1 A ˆ X ˆ H h 2 1 B ˆ X ˆ H h
3 4 B
0 l1 h1 X 1 HA
l 2 h2 l 3 h3 l4 h4 l5 h5 l6 h6 l7 h7 l8 h8
h1
B
s1 h3 s3
D
0 2
s2
h2
C
A
h5
l 2 h2 l 3 h3 l4 h4 l5 h5
0 1
s5
s4
h4
3、计算误差方程常数项 l
0 l1 h1 X 1 HA 0
X X 23 X H 0 X X 14 X H 0
ˆ h 1 h1 ˆ h h 2 2 ˆ h3 h3 ˆ h4 h4 h ˆ h5 5
v1 5.847 v2 3.791 v 3 9.638 m v 4 7.375 2.263 v5
项目6 控制网的数据处理
2.将地面观测的水平方向归算至椭球面
控制测量
垂线偏差改正的计算公式是:
( sin Am cos Am ) cot Z 1 u
( sin Am cos Am ) tan 1
, 为测站点上的垂线偏差在子午圈及卯酉圈 式中: 上的分量,它们可在测区的垂线偏差分量图中内插取 Am 为测站点至照准点的大地方位角; 1 为照准点 得; 的天顶距;Z1 为照准点的垂直角。
1 式中 ym ( ya yb ) ,为a、b两点的y坐标的自然的平 均值。 2
控制测量
3 、距离改化 (1)概念 如右图所示,设椭球体上有两 点 P1 , P2 及其大地线 P, P ,在高 斯投影面上的投影为 s 及 S 。 是一条曲线,而连接 P1P2 两点 的直线为 D如前所述由 S化至D 所加的改正,即为距离改 正 S 。 m (2)长度比和长度变形
2 D
1 e
cos B1 cos A1
式中
Hm
24R A 1 (H1 H 2 ) 2
RA
控制测量
电磁波测距边长归算的几何意义: (1)计算公式中右端第二项是由于控制点之高 差引起的倾斜改正的主项,经过此项改正,测线已变 成平距; (2)第三项是由平均测线高出参考椭球面而引 起的投影改正,经此项改正后,测线已变成弦线; (3)第四项则是由弦长改化为弧长的改正项。 电磁波测距边长归算至椭球面上的计算公式还可用下 3 H D 2 2 m 式表达: S D h 1
e2 2 g S 2 ( 2) 1 cos 2 B1 sin 2 A1 12
控制测量
式中S为AB间大地线长度, ,N 1 为测站点 N1 纬度 B1 相对应的卯酉圈曲率半径。现令在一般情况 下,一等三角测量应加三差改正,二等三角测量应 加垂线偏差改正和标高差改正,而不加截面差改正; 三等和四等三角测量可不加三差改正。但当 10 时或者H>2 000m时,则应分别考虑加垂 线偏差改正和标高差改正。在特殊情况下,应该根 据测区的实际情况作具体分析,然后再做出加还是 不加改正的规定。如下表所示:
水准网条件平差程序设计毕业论文

本科生毕业设计说明书(毕业论文)题目:水准网条件平差程序设计学生姓名:房新明学号:1072143138专业:测绘工程班级:测绘10-1班指导教师:郭义水准网条件平差程序设计摘要近年来,随着我国经济的快速发展,国家大力于投资各种铁路建设和公路建设,测绘工程的运用也越来越突出。
以水准网布设的高程控制网在各类工程中随处可见。
但观测到的数据存在着各种各样的误差,这就需要我们通过简易平差或严密平差来对数据进行处理,从而使数据能够达到工程的预期精度。
本文主要研究如何解决绘图软件行业标准的网络数据处理问题。
从水准网的结构,平差基本原理、调整模型,基本方程及其解,并对法方程组成,求解,平差值的计算及其精度评定作了介绍。
和Visual studio6.0编程软件的利用,利用C语言是程序设计的相干事情。
在今后的测量工作中,可结合实际平差方案进行平差计算。
关键词:平差模型;精度评定;程序设计Leveling Network Adjustment Program DesignAbstractIn recent years, with China's rapid economic development, the state vigorously investment in all kinds of railway construction and road construction, the use of mapping project is also more and more prominent. In order to control the network level network in various engineering in everywhere. But the observed data exist various error, this needs us through simple adjustment or rigorous adjustment for data processing, so that data to achieve the desired precision engineering.This paper mainly studies how to solve the problem of mapping software industry standard network data processing. From the structure adjustment of leveling network, the basic principle, adjustment model, basic equation and its solution, and the composition of the solution of equations, adjustment calculation and precision evaluation, gross error elimination are introduced as well. And the use of Visual Studio6.0 programming software, using C programming language is related to program design. The measurement work in the future, can be combined with the actual adjustment adjustment calculation.Key words: adjustment model;the accuracy assessment;program design目录摘要 (I)Abstract .......................................................................................................................... I I 第一章绪论 (1)1.1研究背景及意义 (1)1.2国内外研究现状 (2)1.3本文研究的具体内容 (2)第二章条件平差数学模型 (3)2.1条件平差模型 (3)2.1.2测角网条件方程 (6)2.1.3测边网条件方程 (8)2.1.4以坐标为观测值的条件方程 (11)2.2精度评定 (13)2.3条件平差的计算步骤 (17)第三章水准网的设计 (18)3.1水准测量 (18)3.1.1水准网的基本概念 (18)3.2水准网的布设 (19)3.2.1国家水准网的布设 (19)3.2.2水准网的布设要求 (20)第四章C语言介绍 (21)4.1C语言的基本概念 (21)4.2C语言的介绍 (22)4.2.1C语言的特点 (22)第五章程序设计 (24)5.1水准网条件平差和测角网条件平差实例 (24)5.1.1水准网条件平差 (24)5.1.2测角网条件平差 (27)5.2程序代码 (32)参考文献 (57)附录A:外文文献 (58)附录B:中文译文 (70)致谢 (76)第一章绪论1.1研究背景及意义施工测量工作是非常基本的,重要环节。
高程控制网平差

i
i
i
h h V 改厕厕短的改正数, 代入上式,得:
i
i
i
V1 V2 V3 V4 W 0
W H A h1 h2 h3 h4 H B
1.附合水准路线的条件数和条件方程式组成
观测值5个,待定水准点2 个,所以条件有3个,可 以列出3个条件方程:
h1
H B h1 h2 H A 0
V 1 V 3 V 2 W a 0 V 2 V 4 V 6 W b 0 V 4 V 5 V 3 W c 0
(二)观测值权的确定:
1.各水准路线都进行了往返观测,每公里水准路线的观测中误差为 ,
则m:i
R mi2
1 4n
n i
2 i
i
式中,为测往返测高程不符值,以mm为单位;R为测段长度,以km为单位;n
H A h2 h3 h5 H D 0
H B h1 h3 h4 H C 0
一般以1个已知点为起点,其它已知点为终点,所构成的附合 水准路线为已知点数减1,这样可以列出的条件方程式为已知 水准点个数减1.
2.闭合水准路线的条件数和条件方程式的组成
从一个水准点出发,经过若干水准测段,又回到该 水准点,这样的水准路线称为闭合水准路线。
V 1 V 7 V 8 W b 0
V 2 V 8 V 7 W c 0
V 3 V 5 V 8 W d 0
V 4 V 6 V 5 W e 0
2.闭合水准路线的条件数和条件方程式的组 成
图(c)是四边形状水准网,网中有4个待定点,没有已知点, 在平差计算时,只能确定个待定水准点之间的相互关系,如 果确定一个水准点的高程,就可以确定其他点的高程。因此, 该网的必要观测是3个,观测值总数是6个,又3个多余观测, 可以列出3个条件方程。为了让所列立的条件方程式互相独 立,没个条件方程都要求有一个其他方程没有用到的观测值, 即:
高程平差方法 举例说明
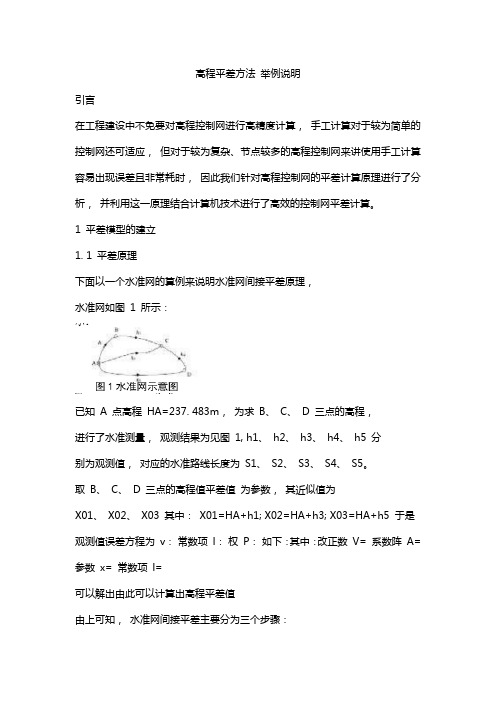
高程平差方法举例说明引言在工程建设中不免要对高程控制网进行高精度计算,手工计算对于较为简单的控制网还可适应,但对于较为复杂、节点较多的高程控制网来讲使用手工计算容易出现误差且非常耗时,因此我们针对高程控制网的平差计算原理进行了分析,并利用这一原理结合计算机技术进行了高效的控制网平差计算。
1 平差模型的建立1. 1 平差原理下面以一个水准网的算例来说明水准网间接平差原理,水准网如图1 所示:已知A 点高程HA=237. 483m,为求B、C、D 三点的高程,进行了水准测量,观测结果为见图1, h1、h2、h3、h4、h5 分别为观测值,对应的水准路线长度为S1、S2、S3、S4、S5。
取B、C、D 三点的高程值平差值为参数,其近似值为X01、X02、X03 其中:X01=HA+h1; X02=HA+h3; X03=HA+h5 于是观测值误差方程为v:常数项l:权P:如下:其中:改正数V= 系数阵A= 参数x= 常数项l=可以解出由此可以计算出高程平差值由上可知,水准网间接平差主要分为三个步骤:(1)高程近似值的计算;(2)列立观测值的误差方程;(3)解误差方程并求高程平差值。
1. 2 常数项矩阵的问题在求近似高程时,同一个未知点的近似高程并不是唯一的一个确定值,它的值随着计算时选择的线路不同而改变,因此得出的常数项矩阵L 也并不是唯一的,在下面的程序计算里面,输入已知数据时线路的排序不同,得出的常数项矩阵L 也不同,当然最后得到的高程改正数也不一样,由于进行平差计算时设的未知数就是未知点高程的近似值,因此在最后得到的未知点的高程平差值跟计算高程近似值时选择的线路无关,只要计算正确,最终得到的高程平差值也是正确的。
这一点可以在使用程序的过程中进行检验,无论线路排序如何改变,只要数据输入正确,得到的结果是一样的。
2 平差程序设计2. 1 关于程序语言的选用考虑到本软件所要解决的问题主要是数据的处理与计算,不涉及到计算机系统底层的操作,因此选用相对简单的Visual Basic 6. 0 来进行程序的编写,使用间接平差模型,在保证计算精度的同时,一来减少了代码编写的难度,二来提高了代码执行的效率。
水准平差计算步骤

水准平差计算步骤水准平差是地理测量中常用的一种方法,用于确定不同测站之间的高度差。
水准平差的计算步骤通常包括以下几个方面:一、建立基准面在进行水准平差之前,首先需要建立一个基准面。
基准面是一个参考平面,用于确定各个测站的高度。
常用的基准面有大地水准面、局部水准面等。
建立基准面的方法有大地水准测量和水准网平差等。
二、选取控制点水准平差需要选取一些已知高程的控制点,作为参考点来进行计算。
这些控制点的高程可以通过已有的水准测量数据或其他可靠的高程数据来确定。
三、观测测站高程在进行水准平差之前,需要在各个测站上进行高程观测。
高程观测可以使用水准仪进行,通过读取测站上的刻度来确定其高程。
四、建立观测方程观测方程是水准平差的基础,用于描述观测量与未知量之间的关系。
观测方程通常由观测量与已知量之差构成,其中已知量包括控制点的高程和观测误差。
五、进行平差计算平差计算是水准平差的核心内容。
通过建立观测方程组,可以使用最小二乘法或其他数学方法来求解未知量,即各个测站的高程差。
六、检查平差结果进行水准平差后,需要对平差结果进行检查,以确定其准确性和可靠性。
检查的方法包括误差分析、残差检查等。
七、确定测站高程根据平差结果,可以确定各个测站的高程。
这些高程可以用于地理测量中的其他工作,如地形绘图、工程测量等。
总结:水准平差是一种重要的地理测量方法,用于确定不同测站之间的高程差。
其计算步骤包括建立基准面、选取控制点、观测测站高程、建立观测方程、进行平差计算、检查平差结果和确定测站高程等。
通过水准平差,可以得到准确可靠的测站高程数据,为地理测量工作提供重要支持。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高程控制网平差计算程序
王金;王宇辉
【期刊名称】《黑龙江测绘》
【年(卷),期】1996(019)002
【摘要】1 程序功能及特点本程序以测段高差为平差克素,采用间接平差法,用BASIC语言编制。
适用于独立的,非独立的,秩亏的三角高程控制网和水准网的平差计算。
可完成待定点的高程计算;观测平差及改正数的计算;待定点的平差值计算;可评定任意点高程和任意两点间高差的精度。
任何网型不需要辅入附加信息,使用IBM(286,386、486等)
【总页数】5页(P20-24)
【作者】王金;王宇辉
【作者单位】不详;不详
【正文语种】中文
【中图分类】P216
【相关文献】
1.赫尔墨特方差分量估计在CPⅢ高程控制网平差中的应用 [J], 陈龙
2.基于MATLAB的高程控制网平差系统的设计与应用 [J], 高霞;应建福
3.基于VC平台的高程控制网平差软件设计与实现 [J], 朱楠;徐良骥;郭辉;刘利君;吴鸿涛
4.CASIO fx—4850P计算器高程控制网按间接平差计算程序 [J], 余志贵
5.几种CPⅢ精密三角高程控制网平差方法对比研究 [J], 李建章
因版权原因,仅展示原文概要,查看原文内容请购买。