边角三角网平差程序的设计书
多功能边角网平差程序
多功能边角网平差程序
顾福生;孙庆堂
【期刊名称】《焦作矿业学院学报》
【年(卷),期】1990(000)002
【摘要】由于 PC-1500计算机在测量平差计算中应用日益广泛,编制适用于该机的平差程序也愈来愈多。
但是如何编制出一个功能多,容量大,程序短的边角网平差程序是本文主要的目标。
本程序就是按照以上设想而编制的。
本程序计算功能多,需要输入的信息少,计算速度快,打印的结果齐全清晰易读。
【总页数】17页(P27-43)
【作者】顾福生;孙庆堂
【作者单位】不详;不详
【正文语种】中文
【中图分类】TD172.3
【相关文献】
1.边角网平差计算中观测边长"权"的确定 [J], 张玉呆
2.边角网平差函数模型的系数矩阵计算的探讨 [J], 刘洪晓
3.基于方差分量估计的边角混测网平差计算程序设计 [J], 王静
4.三角网与边角网平差程序之扩充 [J], 陈艾荷
5.平面控制网平差中边角权的关系——对《水利水电工程测量规范》边角权公式的商榷 [J], 蒋尚勤;程启明
因版权原因,仅展示原文概要,查看原文内容请购买。
测量平差程序设计-边角三角网平差程序设计
测量平差程序设计-边角三角网平差程序设计测量平差程序设计课程设计任务书专业班级:____ __ __________指导教师:____ _____________小组成员:目录设计题目 (1)设计资料: (1)一、课程设计的目的 (2)二、课程设计的任务和内容 (2)三、课程设计阶段 (2)四、组织方式进度安排 (3)五、考核与成绩评定 (4)六、参考文献: (4)七、实习报告: (5)设计题目边角三角网平差程序设计设计资料:一、课程设计的目的学生在学习完误差理论与测量平差基础、测量平差程序设计基础等课程的基础上,设计一个完整的测量数据处理程序,培养学生综合应用量数据处理与计算机应用能力,培养学生主动学习,创新设计能力。
二、课程设计的任务和内容1.课程设计任务:在两周的时间内应用者Matlab程序设计语言编制一个完整的边角网严密平差程序,要求有简易的界面,数据输入采用文本输入,采用间接平差模型完成平差的基本计算,能够画出控制网图,输出基本的计算结果,并根据设计过程完成设计报告。
程序设计主要内容包括:系统功能设计界面设计流程设计代码书写程序调试三、课程设计阶段准备阶段研究设计任务书,分析设计题目,熟悉原始数据,明确设计内容和要求;制定课程设计计划和进度。
熟悉算法模型阅读误差理论与测量平差基础教材,掌握平面控制网数据处理的数学模型,这里主要是指方向观测量、角度观测量、边长观测量的观测方程和误差方程的构成,研究平面观测数据的组织方法,设计Matlab算法,实现计算的自动表达。
功能设计阶段设计程序要实现的功能平差程序的基本功能包括数据的输入,平差计算,精度评定、成果输出等;4.流程和界面设计阶段根据平差计算的过程和程序功能,画出流程图,设计简易界面实现数据的输入和平差计算和成果输出。
在此基础上,根据功能要求,设计简便的界面。
5.代码书写和调试阶段按照计算流程图和界面设计,根据方向观测值,边长观测值的误差方程的组成,设计Matlab算法,实现误差方程的自动构成,分阶段书写代码,调试实现各个阶段的功能。
边角网坐标平差算例

§9.8 边角网坐标平差算例例9 今有一边角网如图9-11所示。
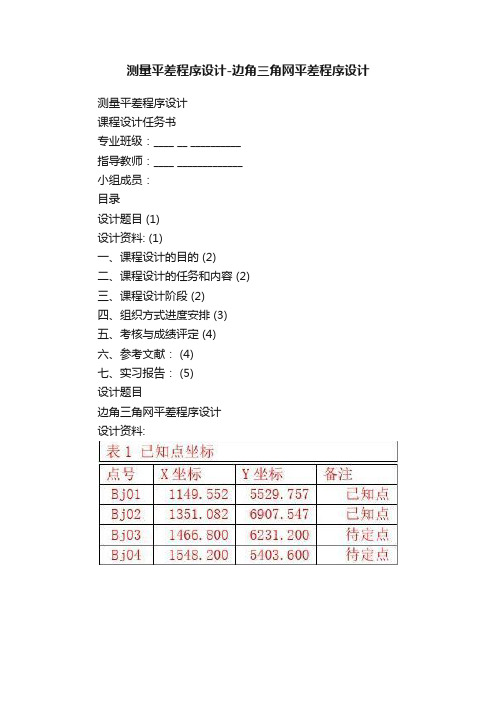
网中A 、B 、C 、D 、E 是已知点,起算数据见(表9-12),1P 、2P 是待定点。
同精度观测了九个角度921,,,L L L (见表9-13),测角中误差为5.2''±;测量了五个边长141110,,,L L L ,其观测结果及中误差见表9-13。
试按间接点1P 按 013.493301=x m 702.651301=y m283.468402=x m 948.799202=y m2、由已知点坐标和待定点近似坐标计算待定边的坐标方位角改正数方程系数(见表9-14的6~9列);计算待定边的边长改正数方程的系数(见表9-14的10~13列)。
需要指出,坐标方位角改正数方程的系数的单位是秒/厘米,而边长改正数的系数无单位。
3、计算观测角误差方程的系数和常数项,其结果见表9-15的1~9行。
写出观测边误差方程的系数和常数项,其结果见表9-15的第10~14行。
表中,每一行表示一个误差方程;s 为每个误差方程的和检核数。
设取±2.5″为单位权中误差,则测角的权为22)(i i m P ββμ=令 22i m βμ=,则1)5.2()5.2(2222===ii i m m P βββ(无单位) 观测边的权为 2222)(ii Li mm m P iβμ==(秒2/cm 2)表9-14表9-15表9-163 / 64 / 6各观测值的权写在表9-15的p 列中。
v 为角度及边长的改正数,是在解出坐标改正数后计算的。
表9-15中,角度误差方程常数项的单位为秒,边误差方程常数项的单位为cm ,按误差方程求得观测角和观测边的改正数的单位也分别为秒和cm 。
4、法方程的组成和解算。
由表9-15取得误差方程的系数、常数项、和检核数和权组成法方程的系数、常数项、检核数,其结果和法方程的解算均见表9-16。
三角网坐标平差

三角网坐标平差时间:2009-12-27 来源:本站作者:节选§12.1三角网坐标平差第十二章概述间接平差又称参数平差。
水平控制网按间接平差时,通常选取待定点的坐标平差值作为未知数(按方向平差时,还增加测站定向角未知数),平差后直接求得各待定点的坐标平差值,故这种以待定点坐标作为未知数的间接平差法也称为坐标平差法。
参加平差的量可以是网中的直接观测量,例如方向、边长等;也可以是直接观测量的函数,例如角度等。
由于三角网的水平角一般是采用方向观测法观测,并由相邻方向相减而得,故它们是相关观测值。
此时,若不顾及函数间的相关性,平差结果将受到一定的曲解。
因此,坐标平差法都按方向平差。
间接平差的函数模型是误差方程,它是表达观测量与未知数之间关系的方程式。
一般工程测量平面控制网的观测对象主要是方向(或角度)和相邻点间的距离(即边长)因此坐标平差时主要列立各观测方向及观测边长的误差方程式,再按照间接平差法的原理和步骤,由误差方程和观测值的权组成未知数法方程去解算待定点坐标平差值,并进行精度评定。
本章主要研究(测)方向网、测边网以及测边测角网的严密坐标平差。
水平控制网按坐标平差法进行平差时,为降低法方程的阶数以便于解算,定向角未知数可采用一定的法则予以消掉。
由于误差方程式的组成简单且有规律,便于由程序实现全部计算,因此,在近代测量平差实践中,控制网按间接平差法得到了广泛的应用。
平面控制网按坐标平差时,网中每一观测值都应列立一个误差方程式。
为便于计算,通常总是将观测值改正数表示为对应待定点坐标近似值改正数的线性式。
坐标平差的第一步是列组误差方程式。
对于方向网而言,参与平差的观测值是未定向的方向,选定的未知数是待定点的纵、横坐标值。
误差方程式就是方向观测值改正数表达为待定点纵横坐标值的函数式,可以通过坐标方位角来建立方向值与未知数之间的联系。
12.1.1方向误差方程式的建立和组成在测站k上观测了等方向其方向观测值为它们的改正数为为测站的零方向(起始方向),则任意方向的坐标方位角平差值方程为(12-1)式中:为方向的平差值,为方向的坐标方位角,通常称测站定向角,为定向角的近似值,为定向角的改正数,是个未知参数,,如果令两点的近似坐标分别为和,其相应的改正数分别为和,则有关系:(12-4)(12-3)将上式按台劳级数展开,坐标方位角改正数方程:(12-5)将(12-5)代入(12-4)然后再代入(12-1)得:(12-6)式中,(12-7)计算中,以㎏为单位,和以dm为单位,且换以(12-6)变为,(12-8)式中,(10-9)(12-6)和(12-8)式为方向误差方程式,考虑到边长误差方程式(12-35)式以便于编程常用(12-8)式。
网平差(三角网,三边,导线网)

五.三角网平差图9-1表示在高级点A 、B 下加密新点P1,P2的三角网,网中观测了12个方向值L1,L2,...,L12。
试平差此三角网,求:(1)待定点P1及P2的坐标平差值及其中误差;(2)P1与P2点的相对点位中误差。
P 2图9-1 三角网表9-3 三角网观测数据六.三边网平差已知图9-2中的起算数据及观测边长,试平差此三边网,求各观测边长和待定点坐标的平差值,以及各待定点的点位中误差。
P 2P P 4P 56图9-2 三边网表9-4 三边网已知及观测数据1 5 760.706 4 7 838.880 7 5 438.382 2 7 804.566 5 5 483.158 8 7 493.323 3 5 187.3426 5 731.7889 8 884.587107 228.367七.导线网平差图9-3为敷设在已知点A 、B 、C 间的单结点导线网,网中观测了12个角度,丈量了9个导线边。
起算数据和观测结果见表9-5。
已知测角中误差14m β''=±,边长丈量中误差i s m =±。
求各导线点的坐标的平差值;观测值的中误差,9号点及结点G 的点位中误差。
AαB图9-3 导线网表9-5 导线网已知及观测数据 A 11678.714 8419.242 A274 23 34 B 10878.302 8415.114 B α 8 10 27 C 11131.959 7722.199α194 20 121221.6504189.7817148.3372 195.843 5 98.163 8 151.4803 229.356 6 154.773 9 187.751。
测边测角三角网的平差
测边测角三角网的平差王庆峰(新疆阿希金矿伊宁835100)随着激光测距仪和电算技术的发展,全站仪已在工程测量中广泛使用,工程控制网中逐渐采用了测边测角网的布设方案。
边、角网的平差,其方法与三角网的平差方法类似。
只是在平差时尚需对边长观测值亦作相应的平差改正。
下面分别讨论测边测角网平差时的条件方程式形式、个数等有关问题。
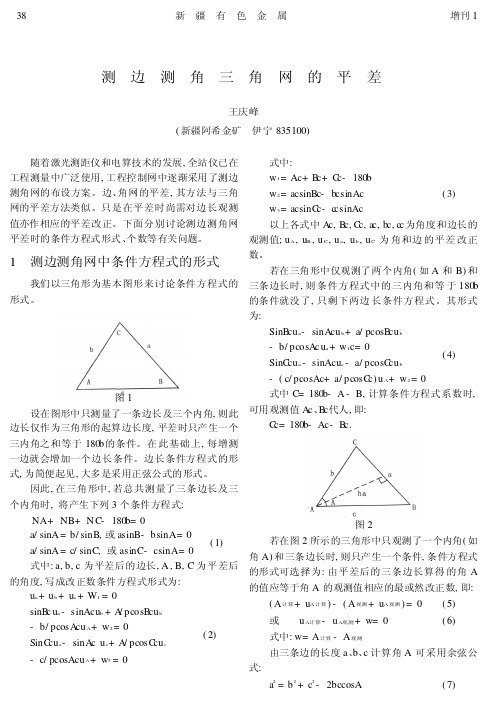
1测边测角网中条件方程式的形式我们以三角形为基本图形来讨论条件方程式的形式。
图1设在图形中只测量了一条边长及三个内角,则此边长仅作为三角形的起算边长度,平差时只产生一个三内角之和等于180b的条件。
在此基础上,每增测一边就会增加一个边长条件。
边长条件方程式的形式,为简便起见,大多是采用正弦公式的形式。
因此,在三角形中,若总共测量了三条边长及三个内角时,将产生下列3个条件方程式:NA+NB+N C-180b=0a/sinA=b/sinB,或asinB-bsinA=0a/sinA=c/sinC,或asinC-csinA=0(1)式中:a,b,c为平差后的边长,A,B,C为平差后的角度,写成改正数条件方程式形式为:u a+u b+u c+W1=0sinB c u a-sinAcu b+A/pcosB cu b-b/pcosA cu A+w2=0 S++3=(2)式中:w1=Ac+B c+C c-180bw2=acsinBc-b csinAcw3=acsinC c-c csinAc(3)以上各式中A c,B c,C c,a c,b c,c c为角度和边长的观测值;u A,u B,u C,u a,u b,u C为角和边的平差改正数。
若在三角形中仅观测了两个内角(如A和B)和三条边长时,则条件方程式中的三内角和等于180b的条件就没了,只剩下两边长条件方程式。
其形式为:SinB cu a-sinA cu b+a/pcosB cu b-b/pcosA c u a+w1c=0SinC cu a-sinAcu c-a/pcosC cu b-(c/pcosAc+a/pcosC c)u A+w2=0(4)式中C=180b-A-B,计算条件方程式系数时,可用观测值A c、B c代人,即:C c=180b-Ac-Bc.图2若在图2所示的三角形中只观测了一个内角(如角A)和三条边长时,则只产生一个条件,条件方程式的形式可选择为:由平差后的三条边长算得的角A的值应等于角A的观测值相应的最或然改正数,即:(A计算+u A计算)-(A观测+u A观测)=0(5)或u A计算-u A观测+w=0(6)式中:w=A计算-A观测由三条边的长度、、计算角可采用余弦公式=+()38新疆有色金属增刊1inC cu a-sinA c u c A/pcosC cu c -c/pcosAcu A w0a b c A:a2b2c2-2bccosA7即:A 计算=cos-1b 2+c 2-a 2/2bc(8)为了求得u A 计算,微分(7)式得:2ada=2bdb+2cdc-2ccosAdb-2bcosAdc+2bcsinA dA d/p d 式中的d 为微分符号所以dAd/p d=ac/b cc csinA c da-(b cc ccosAc)/(b cc csinAc)db-c c-bcosA c/b cc c sinAcdc(9)因为a/bcsinA c=1/h a (h a 为a 边上的高)b-ccosAc/bcsinAc=acosC c/bcsinA c=cosCc/h a c-bcosAc/bcsinAc=acosB c/bcsinAc=cosB c/h a(10)用改正数代替式(9)中的微分元素,并将式(10)代入,得u A 计算=p d/h A u A -p dcosC c/h A u b-p dcosB c/h A u c(11)因此,条件方程式(11)的最后公式为:P d/h 2u a -p dcosC c/h A u b -p dcosB c/h a u C-u A 观测+w=0(12)式中角B c 和角C c 可按正弦公式求得,即SinB c=sinA c/a cb c SinCc=sinA c/a cc c2测边测角三角网中条件的个数测边测角自由三角网中,条件方程式的总数可按下式确定:r=N+S-2n+3式中:n 为网中三角点的个数;N 为观测角度的个数;S为观测边长的条数。
三角网条件平差计算
§3-4 三角网条件平差计算2学时三角网测量的目的,是通过观测三角形的各角度或边长,计算三角网中各未知点的坐标、边的长度及方位角等。
三角网按条件平差计算时,首要的问题是列出条件方程。
因此了解三角网的构成,总结其条件方程的种类及各种条件方程的组成规律是十分重要的。
三角网的种类比较多,网的布设形式也比较复杂。
根据观测内容的不同,有测角网、测边网、边角同测网等;根据网中起始数据的多少,有自由三角网和非自由三角网。
自由三角网是指仅具有必要起算数据的三角网,网中没有多余的已知数据。
如果测角三角网中,只有两个已知点(或者已知一个已知点的坐标、一条已知边的长度和一个已知的方位角),根据数学理论,以这两个已知点为起算数据,再结合必要的角度测量值,就能够解算出网中所有未知点的坐标。
如果三角网中除了必要的起算数据外还有其它的已知数据,或者说已知数据有冗余,就会增加对网形的约束,从而增强其可靠性,这种三角网称之为非自由三角网。
无论多么复杂的三角网,都是由单三角形、大地四边形和中点多边形组合而成的。
在本节,我们先讨论三角网条件平差中条件方程个数的确定问题,然后主要讨论测角三角网的条件方程的形式问题。
一、网中条件方程的个数三角网平差的目的,是要确定三角点在平面坐标系中的坐标最或然值。
如图3-9所示,根据前面学到的测量基础知识,我们知道,必须事先知道三角网中的四个数据,如两个三角点的4个坐标值,或者一个三角点的2个坐标值、一条边的长度和一个方位角,这4个已知数据我们称之为三角网的必要起算数据。
有了必要起算数据,就可以确定三角网在平面坐标系中的位置、网的大小及其方位,就可以计算三角网中未知点的坐标。
要对三角网进行平差计算,还必须先知道网中的总观测数n、判定必要观测数t,从而确定了多余观测数:r = n - t由条件平差原理知,多余观测数与条件方程数是相等的,有了多余观测数,也就确定出了条件方程的个数。
因此,问题的关键是判定必要观测数t。
平面控制测量平差计算设计书
平面控制测量平差计算设计书一.概述1.任务来源:2.任务目的:计划在九合乡开发建设,需要测绘1:10000地形图3.任务量:根据开发区提供1:10000地形图1份及已有控制点成果一套,从满足测图工作需要(密度、精度、经费等多方面)角度出发,完成一份相应等级控制网的技术设计图和技术设计书。
4.作业围:。
5.作业容:根据建设规划要求,首先需要在燕郊约30km2的测区围建立三等三角网、测边网或导线网,高程采用三等水准测量测量方式。
6.行政隶属:中华人民国省三河市。
燕郊辖区包括行宫、小各庄、王各庄、枣林、北蔡各庄、樊村、辛庄、南巷口等,测区面积共30平方公里。
7.完成期限:2011年12月22日~2012年1月1日,为期10天。
二.作业区自然地理概况与已有资料情况三.引用文件1.《国家三、四等水准测量规》(GB12898—91);2.《城市测量规》(CJJ8-99);3.《工程测量规》(GB50026-2007)4.《测绘技术设计规定》5.《全球定位系统(GPS)测量规》四.成果主要技术指标和规格坐标系:平面控制网采用高斯平面直角坐标,参考椭球体为克拉索夫斯基球体。
高斯投影直角坐标系采用三度带其中央子午线是117°。
高程基准:采用1985国家高程基准,在已有高程控制网的地区进行测量时,可沿用原高程系统,当小测区有困难时,采用假定高程坐标系统。
高程控制网均采用四等测量方法和精度。
时间系统:时间投影方法:采用高斯正形投影3°带平面直角坐标系统。
精度或技术等级:导线测量的主要技术要求②当测区测图的最大比例尺为 1:1000 时,一、二、三级导线的导线长度、平均边长可适当放长,但最大长度不应大于表中规定相应长度的 2 倍。
③当导线平均边长较短时,应控制导线边数,但不得超过表相应等级导线长度和平均边长算得的边数;当导线长度小于表规定长度的1\3时,导线全长的绝对闭合差不应大于13cm。
④导线宜布设成直伸形状,相邻边长不宜相差过大。
3-4三角网条件平差计算
§3-4 三角网条件平差计算2学时三角网测量的目的,是通过观测三角形的各角度或边长,计算三角网中各未知点的坐标、边的长度及方位角等。
三角网按条件平差计算时,首要的问题是列出条件方程。
因此了解三角网的构成,总结其条件方程的种类及各种条件方程的组成规律是十分重要的。
三角网的种类比较多,网的布设形式也比较复杂。
根据观测内容的不同,有测角网、测边网、边角同测网等;根据网中起始数据的多少,有自由三角网和非自由三角网。
自由三角网是指仅具有必要起算数据的三角网,网中没有多余的已知数据。
如果测角三角网中,只有两个已知点(或者已知一个已知点的坐标、一条已知边的长度和一个已知的方位角),根据数学理论,以这两个已知点为起算数据,再结合必要的角度测量值,就能够解算出网中所有未知点的坐标。
如果三角网中除了必要的起算数据外还有其它的已知数据,或者说已知数据有冗余,就会增加对网形的约束,从而增强其可靠性,这种三角网称之为非自由三角网。
无论多么复杂的三角网,都是由单三角形、大地四边形和中点多边形组合而成的。
在本节,我们先讨论三角网条件平差中条件方程个数的确定问题,然后主要讨论测角三角网的条件方程的形式问题。
一、网中条件方程的个数三角网平差的目的,是要确定三角点在平面坐标系中的坐标最或然值。
如图3-9所示,根据前面学到的测量基础知识,我们知道,必须事先知道三角网中的四个数据,如两个三角点的4个坐标值,或者一个三角点的2个坐标值、一条边的长度和一个方位角,这4个已知数据我们称之为三角网的必要起算数据。
有了必要起算数据,就可以确定三角网在平面坐标系中的位置、网的大小及其方位,就可以计算三角网中未知点的坐标。
要对三角网进行平差计算,还必须先知道网中的总观测数n、判定必要观测数t,从而确定了多余观测数:r = n - t由条件平差原理知,多余观测数与条件方程数是相等的,有了多余观测数,也就确定出了条件方程的个数。
因此,问题的关键是判定必要观测数t。
三角网坐标平差报告[精华]
控制网平差报告
[控制网概况]
1、本成果为按[平面]网处理的平差成果
计算软件:南方平差易2002
网名计算日期:日期: 2011-12-17
观测人罗贤军
记录人:罗贤军
计算者:罗贤军
测量单位:东华理工大学
备注:三角网坐标平差
2、平面控制网等级:国家四等,验前单位权中误差1.5(s)
3、控制网数据统计结果
[角度统计结果]控制网中最小角度:0.3847,最大角度:2.2699 3、控制网中最大误差情况
最大点位误差= 0.2196 (m)
最大点间误差= 0.3948 (m)
最大边长比例误差= 33183
平面网验后单位权中误差= 8.44 (s)
闭合差统计报告
几何条件:中点多边形
路径:[A-B-C-P2-P1]
极条件闭合差=-3,限差=4
几何条件:中点多边形
路径:[C-D-A-P1-P2]
极条件闭合差=1,限差=4
几何条件:闭合导线
路径:[B-P1-A]
角度闭合差=2(s),限差=8(s)
几何条件:闭合导线
路径:[D-P2-A]
角度闭合差=-1(s),限差=8(s)
几何条件:闭合导线
路径:[P1-P2-A]
角度闭合差=-0(s),限差=8(s)
几何条件:闭合导线
路径:[C-P1-B]
角度闭合差=-2(s),限差=8(s)
几何条件:闭合导线
路径:[C-P2-P1]
角度闭合差=-2(s),限差=8(s)
几何条件:闭合导线
路径:[C-D-P2]
角度闭合差=4(s),限差=8(s) [方向观测成果表]
[平面点位误差表]
[平面点间误差表]
[控制点成果表]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
边角三角网平差程序设计书一、课程设计的目的学生在学习完误差理论与测量平差基础、测量平差程序设计基础等课程的基础上,设计一个完整的测量数据处理程序,培养学生综合应用量数据处理与计算机应用能力,培养学生主动学习,创新设计能力。
二、课程设计的任务和内容1.课程设计任务:在两周的时间内应用者Matlab程序设计语言编制一个完整的边角网严密平差程序,要求有简易的界面,数据输入采用文本输入,采用间接平差模型完成平差的基本计算,能够画出控制网图,输出基本的计算结果,并根据设计过程完成设计报告。
程序设计主要内容包括:系统功能设计界面设计流程设计代码书写程序调试三、课程设计阶段准备阶段研究设计任务书,分析设计题目,熟悉原始数据,明确设计内容和要求;制定课程设计计划和进度。
熟悉算法模型阅读误差理论与测量平差基础教材,掌握平面控制网数据处理的数学模型,这里主要是指方向观测量、角度观测量、边长观测量的观测方程和误差方程的构成,研究平面观测数据的组织方法,设计Matlab算法,实现计算的自动表达。
功能设计阶段设计程序要实现的功能平差程序的基本功能包括数据的输入,平差计算,精度评定、成果输出等;4.流程和界面设计阶段根据平差计算的过程和程序功能,画出流程图,设计简易界面实现数据的输入和平差计算和成果输出。
在此基础上,根据功能要求,设计简便的界面。
5.代码书写和调试阶段按照计算流程图和界面设计,根据方向观测值,边长观测值的误差方程的组成,设计Matlab算法,实现误差方程的自动构成,分阶段书写代码,调试实现各个阶段的功能。
6.设计报告撰写阶段设计报告是对整个设计过程进行综合总结提高,内容包括课设的目的意义、程序设计的内容、算法设计、设计心得等根据设计过程和对测量数据处理以及程序设计的理解进行独立撰写。
四、组织方式进度安排以小组为单位,每小组5-6人,分工合作共同完成程序设计任务,时间两周,进度安排如下:五、考核与成绩评定考核内容根据考勤、课程设计报告、程序结构、程序代码进行综合评定。
成绩评定方法平时成绩20%,设计报告30%;程序代码50%(程序20%,运行正确30%),总评成绩分为优、良、中、差四个等级。
设计报告内容完整,图表清晰,代码书写规范,计算结果正确评为优秀。
六、参考文献:武汉大学测绘学院误差理论与测量平差基础 2009北京建筑工程学院测量平差计算自编资料 2011同济大学 Matlab 控制网测量平差 2006七、实习报告:目的与任务:目的:基于学过的测量平差理论的基础知识,在matlab中编写一个相对完整的数据平差处理程序,旨在让同学们能够将学到的平差理论知识和计算机的MATLAB软件程序编写有机地结合在起来,让同学在实践过程中更加深刻地理解理论知识并尝试去应用,由此提高每个人学生的思考和动手能力。
任务:主要任务就是在实习的两周时间内,分组完成一套完整的关于边角三角网的平差数据处理的matlab的程序代码编写与试调任务,其中主要包括:数据组织与输入、平差计算、精度评定,成果可视化、平差成果输出等。
然后小组上交一份实习总结和小组成员各上交一份个人总结(设计书及总结)。
算法与模型:算法:间接平差方法;模型:平面控制网中的边角三角网本次的平差数据处理是采用间接平差的方法(数学模型)而进行的,就三个待定点xy坐标改正数及涉及到的五个观测站的方位角改正数为未知数(11个),进行误差方程的编写和平差计算,精度评定等。
而实际应用是采用所提供的平面控制网中的边角三角网的平差数据模型,分别是就着边长观测量和方向角观测量的观测数据进行平差程序的编写。
程序功能设计:通过手动地选择数据文件,而后自动地对数据文件中涉及的变量进行赋值和所获得的数据的输出,而后通过实际情况分析得出需要进行平差计算和精度评定等的必要步骤,如本次数据平差的必要步骤就是待定点近似坐标的计算,紧接着就是误差方程的编写,包括系数矩阵和观测权阵的求得,而后就是利用最小二乘法的平差计算和精度评定,并且计算误差椭圆的参数和该椭圆的自动绘制,最后平差成果的输出。
分模块讲解:数据组织输入和变量赋值已知点坐标信息:包括已知点数n0,待定点数nd,点号名pn和已知点坐标xy0观测值精度信息:方向观测值精度md,边长观测值精度ma ,mb边长观测值信息:包括起点bf1, 终点bf2 ,边长观测值L2方向观测值:包括测站点df1 ,照准点df2, 方向观测值L1具体代码截图:待定点近似坐标的计算通过所提供的已知点坐标计算得出的已知方位角,在就方向观测值,求出其每一次观测的夹角,而后找出每个测站所拥有的已知点(一个观测方向的两个点)确定其所在观测的行数与其他待定点所在观测方向(必须有一个点是已知点)的关系,求出其他待定点所在观测方向的方位角(注意方位角是否合理问题),而后在边长观测值中找到对应的边长,利用极坐标法最终求得待定点的近似坐标。
x0y0. 同时还可以将近似坐标以文本的文件输出,计算代码截图如下:误差方程式组成本次平面控制网平差模型中观测量为方向观测量和边长观测量,未知数分为待定点坐标和定点角两类未知数,边角网误差方程的形式如下:方向观测量:误差方程:(系数为:b1,c1)式中常数项:变长观测量:误差方程:(系数为:b2,c2)其中误差方程的编写要注意两个问题:系数的位置确定和是否待定点的判断。
对于方向观测值,未知数不仅包括各待定点坐标(6个),同样包括各测站的定向角,在未知数排序中,定向角未知数在前,待定点坐标在后,则未知数个数为nz+2*nd=11,对于方向观测值,每一列与定向角对应的系数均为-1,与坐标对应的系数即每一列有5个系数(最多),其他系数均为0,及对应的系数矩阵的数值的确定(注意正负号)。
而对于边长观测值,每一列包括边的两个点的对应的改正数(如果两个点都是待定点的话)四个参数,其他均为0,同样还要注意系数的位置问题。
由于这里分别对方向观测量和边长观测量设置两个数组,分别存储系数阵常数项变量,这里设置b1 b2 c1 c2四个数组。
根据观测值序列和未知数序列确定系数矩阵中各元素的位置和大小;这里将误差方程构成设计成一个function函数文件,输入量为已知点信息,近似坐标,边长观测量,方向观测量,等输出量为误差方程系数,常数项。
代码编写截图:5.平差计算和精度评定本次平差的特殊就是结合两个误差方程的数据进行同时平差,具体步骤在得到误差方程的系数之后,根据方向观测值和边长观测值的初步计算观测值权阵(p1 p2),严格的精确计算可以采用方差分量估计方法精确计算方向和边长观测值的权。
在得到误差方程之后,可以直接利用矩阵进行方程组的解算(最小二乘法),误差方程分为方向观测误差方程,边长观测误差方程,两者可分别计算,然后再相加。
由于近似坐标不精确,在求取参数时,程序设置了迭代计算并确定终止条件,在改正数满足条件后,即可进行平差值计算和精度统计。
程序截图:6.误差椭圆参数计算参考书上的误差椭圆参数计算模型由于误差椭圆描述了点位精度及其在各个方向的分布,表示了网中点或点之间的误差分布情况,常用误差椭圆对布网方案做精度分析,误差椭圆三个参数为椭圆的长半轴E,短半轴F和主轴方向本次参数计算是通过单位权中误差,协因素阵,待定点的协方差阵等上一步平差得出的结果或推算结果,来进行误差椭圆确定。
代码截图:7.控制网图形绘制和误差椭圆绘制边角三角网控制网图形绘制主要考虑绘制控制网点位分布图,点位标注,边长观测量和方向观测量的绘制等。
基本思路是首先根据坐标绘制控制网散点图,并进行标注,然后根据距离观测值,方向观测值连线,构成完整的控制网图。
至于误差椭圆的绘制则是在控制网图的基础上再加上待定点对应的误差椭圆的绘制就完成了。
(利用Plot命令)其中有一个特别注意的地方就是参数的设置,要根据实际情况而定。
绘制代码截图:8.平面控制网成果输出以生成txt格式文档的形式进行成果输出。
其内容主要包括五个方面内容:平差计算后的坐标值,待定点点位中误差,误差椭圆参数计算等。
信息具体内容如下:1.平差计算成果成果总输出;2.坐标平差成果输出3.点位误差椭圆参数4.误差椭圆的绘制5.方向观测平差成果:方向观测值,平差值,改正数;6.边长观测平差成果:边长观测值,边长平差值,改正数;代码截图(其中的几个):平差主界面的设计此界面为本组实习成果的最大创新之一,就是我们在原本要求的平差程序界面(边角三角网平差程序)的基础上增加了另一个界面,就是小组信息的界面(包括有小组成员照),而两个界面之间利用一个总的界面(小组平差程序设计)进行选择性打开代码截图:主界面—小组平差程序设计总的设计流程图:代码书写与调试:由于上面已经展示过几乎所有的代码(根据每一个模块),真正运行整一个程序的时候却是按照步骤一步步地一个模块地运行,但是问题一定会出现的,而且还不是很少,关键就是怎么样通过一步步地发现问题所在,并根据实际情况去试调程序,合理地按照平差理论去运行程序。
一下列举了一些出现的主要问题。
方位角由于所提供的数据时边角三角网的数据,这样就会涉及到方位角问题,而且还不止一次的出现方位角的运算(如待定点的近似坐标的求解过程中出现过),这就应该惊醒一个重要的细节:就是所求的方位角是否合理?怎么样去判断呢?就是通过if(elseif)语句去判断其与0和360度或者2*pi 的关系,在去改正方位角。
原则上一旦出现方位角的求解出都是要用这个语句去判断,这样才能保证精密。
和提高正确性。
单位问题单位问题出现在两处,就是观测值的单位权的求解处,二是误差方程的系数求解处。
由于这两者是在后面的法方程求解时都要用上所以,在此之前要保证两者的单位相对统一,这个统一要分两处,边长观测量方程系数和方向观测方程系数,特别注意的是原始数据提供的观测精度(两种)的单位,和误差方程的系数的单位,而在实际中,我们组应用的是方向观测用秒为单位,而变成观测以米为单位,这样出来的结果最后的平差数据处理,如精度评定,误差椭圆计算等,也要注意单位问题。
比例参数根据实际求出的误差椭圆参数(E F fi)的大小和所绘制的三角网的大小,这两者之间通过比例参数的调整才能更好地在显示误差椭圆。
弧度转角度对于弧度转角度这个小问题,我不得不提,这是一个关键问题。
为什么?因为我们组把其他问题都解决了后,组的坐标改正数,误差椭圆参数等都很不正常的显示在电脑屏幕上,一次次地打击我们的信心。
最后,我在仔细地对照书本,细心查询,观察异同发现,一个最不关紧要的差异,就是弧度转角度的小问题,我们原来采用的是MATLAB系统自带的弧度转角度的函数,结果我们发现这个问题直接就是导致待定点的近似坐标差异特别大,尤其在待定点3的x,y坐标上面,差了好几米(跟提供的平差结果数据相比),这样后面的就影响到误差方程系数的不正常,和平差计算得出的改正数,单位全中误差,点位误差和误差椭圆参数的异常。