第三章目标规划.doc
目标规划整数规划第三、四、五章
销地 产地 A1 A2 4
B1
B2
B3 2
B4
B5
产量
3
11 3 6 4 3
12 7 5
5
3 2 5 1 4
6
4 2 9 2 5
4
0 8 0 5 0 9
A3
销量
当产大于销时,即
a b
i 1 i j 1 m
m
n
j
加入假想销地(假想仓库),销量为
a b
i 1 i j 1
n
(二)对偶变量法(位势法) 1.基本原理
检验数的计算: 一般问题:σj = C j- CBB-1 Pj = Cj - Y Pj 运输问题: σij = C ij- CBB-1 Pij = Cij - Y Pij = Cij - (u1,u2, …,um, v1, v2, …,vn) Pij = Cij - ( ui+ vj ) 当xij 为基变量时, σij = Cij - ( ui+ vj )=0 由此,任选一个对偶变量为0,可求出其余所有 的ui, vj 。 再根据σij = Cij - ( ui+ vj )求出所有非基变量的检验 数。
A 1 A2 A3
销量
B1 B2 B3 B4
4 12
产量
16 10 2 3 9 10 8 2 8 14 5 11 8 6 22 8 14 12 14 48
10
4
6
11
z 0 8 2 14 5 10 4 2 3 6 11 8 6 246 优点:就近供应,即优先供应运价小的业务。
4. 计划利润不少于48元。
- , P d + , P d -} Min{ P1 d16 maxZ= x1 +8 2 2x2 3 3 5x1 + 10x2 60 • 原材料使用不得超过限额 x1 - 2x2 +d1- -d1+ =0 • 产品II产量要求必须考虑 - -d + =36 4x + 4 x +d 1 2 2 2 • 设备工时问题其次考虑
第三章 综合实践活动课程目标
课程目标具有整体性、阶段性、持续性、层次性和递进性
二、课程目标的分类
(1)行为取向性目标
行为取向的课程目标是期待的学生的学习结果,它具有导向功能、控制功能、激励功能与评价功能。
行为目标具体、明确,便于操作、评价,对于学习以训练知识、技能为主的课程内容较为适合。行为目标取向的课程目标理论主要有泰勒的课程目标理论和布鲁姆的教育目标分类学。
问题设计
识记
对具体事实的记忆
学生是否已经记牢?能否进行识别?鉴别?
识别、描述、命名、列出、辨认、重现、遵循
说出一起交通事故中受伤人数
这次交通事故中谁受伤了?
领会
把握知识材料的意义,对事实进行组织,从而搞清事物的意思
学生能否解释?转换?推断?对比?讨论?鉴别?
总结、转换、论证、解释、说明、举例
描述这起交通事故的经过
泰州学院备课教案纸
授课
课题
第三章小学综合实践活动的课程目标
课型
新授
课时
安排
2
授课
日期
教学内容
课程目标的作用;熟悉综合实践活动课程的总目标与学段目标的具体要求;综合实践活动课程的总目标与学段目标、学段目标与学段目标的关系
教学目标
了解课程目标的作用;熟悉综合实践活动课程的总目标与学段目标的具体要求;理解综合实践活动课程的总目标与学段目标、学段目标与学段目标的关系
你能描述发生了什么事情吗?
应用
应用信息和规则去解决问题或理解事物的本质
学生如何解决问题?进行计算?分类?展示?
建造、制造、构造、建模、预测、预备
运用交通法的规定解释这起交通事故的性质
它是一件大的交通事故吗?
分析
把复杂的知识整体分解,并理解各部分之间联系,解释因果关系,理解事物的本质
第三章(交通枢纽规划布局)
2.微分法 1)产生背景
在重心法的基础上,按照系统最优的理念,提出系统总费用最小化。
2)方法思想
各产生点到决策点间的费用和构成系统总费用,在连续的平面区域内,要 使得总费用有极小值,则可依托求偏导数的思想解决问题。
2)前提条件
该方法实质上就是要求以下几点 即可求解: ➢ 定义一个几何平面系统; ➢ 各点的坐标(点是指在区域内 相互间有业务量的点); ➢ 点到点的运输量; ➢ 运输费率。
一般重心法求解结构图
3)模型表达
x
n
C jW j x j
j 1
y
n
C jW j y j
j 1
n
C jWj
j 1
n
C jWj
货运系统——货物运输最求目标(在枢纽内作业费用最少或完 成运输花费成本最小)
技术作业系统——设施设备运行最求目标(最大的作业能力) 约束条件(st.): ① 业务需求约束(客货源)
② 投资约束(枢纽点运行前期投资成本) ③ 运营费用约束(后期费用约束,是难点) ④ 其他约束(如用地约束、与周边衔接约束等) 注:① 旅客在枢纽内的停留时间主要包括购票、候车、托运、换乘或其他业务 所需时间等; ② 旅客出行时间花费包括枢纽内停留时间、其他方式乘车时间等; ③ 货物运输在枢纽内的作业费用主要包括装卸费、换装费、办理相关手续 时间消耗费用等; ④ 货物完成运输成本包括枢纽内作业费用、运输过程费用等。
等)。
可求得的解:a.选择的枢纽点—— WK(决定枢纽的数目);
率)。
b.发点到选择枢纽点的流量—— X iK(决定枢纽的吸引规模);
半导体个人工作计划和目标
半导体个人工作计划和目标第一章引言1.1 背景和意义半导体行业是当今世界最具潜力和发展空间的产业之一。
半导体器件广泛应用于电子、通信、计算机、医疗和汽车等各个领域,对于推动全球经济的发展和科技的进步具有重要意义。
作为半导体行业的一员,我深感责任重大,需要不断提高自己的专业素养和技能水平,以适应行业的发展和变化。
1.2 本文目的本文旨在制定个人工作计划和目标,明确自己在半导体行业中的发展方向和职业规划,为未来的工作提供指导和参考。
第二章 SWOT分析2.1 个人优势我本科所学专业为电子工程,拥有扎实的电子电路和半导体器件基础知识。
我对半导体行业充满热情,并愿意不断学习和提升自己的技能。
此外,我具备良好的团队合作和沟通能力,能够与他人合作完成任务。
2.2 个人劣势目前我的工作经验较少,对于一些行业内最新的技术和发展动态了解不够深入。
同时,我的英语口语和写作能力有待提高,这在与国际客户和合作伙伴交流时可能会遇到困难。
第三章目标设定3.1 短期目标在接下来的一年内,我计划通过参加相关的培训和学习课程,提高自己在半导体行业的技术水平。
我希望能够掌握一些新的半导体器件设计和制造技术,例如SiC功率器件和集成电路封装等。
此外,我还计划积极参与行业内的知识交流活动,例如参加技术研讨会和学术会议,与同行专家交流学习。
3.2 中期目标在未来的三年内,我希望能够在半导体行业中承担更多的责任和项目。
我计划通过与同事的合作和经验交流,提高自己的问题解决和项目管理能力。
同时,我计划开始进行一些自主研发项目,通过创新和实践,为企业带来更多的价值。
3.3 长期目标在未来五到十年内,我希望能够成为半导体行业的专家,能够在相关领域发表高水平的论文和技术报告,为行业的发展做出贡献。
此外,我计划通过进修硕士或博士学位,提高自己的学术和研究能力。
最终,我希望能够成为一家有影响力的半导体企业的技术负责人,参与并推动行业的发展和创新。
第四章实施计划4.1 学习计划我计划在接下来的一年内参加一些半导体器件的相关培训和学习课程,以提高自己的技术水平。
第三章-目标规划
第三章 目标规划 第一节 目标规划的数学模型目标规划法是求一组变量的值,在一组资源约束和目标约束条件下,实现管理目标与实际目标之间的偏差最小的一种方法。
应用目标规划法解决多种目标决策问题时,首先要建立目标规划模型。
目标规划模型由变量、约束和目标函数组成。
为具体说明目标规划与线性规划在处理问题方法上的区别,先通过例子介绍目标规划的有关概念及数学模型。
一、举例例 1 某厂生产Ⅰ、Ⅱ两种产品,已知计划期有关数据如下,求获利最大的生产方案。
生产有关数据表ⅠⅡ 拥有量 原材料 (公斤) 2 1 11 设备台时(小时) 利润 (元/件) 1 82 1010用线性规划方法求解:设Ⅰ、Ⅱ两种产品产量分别为x 1,x 2⎪⎩⎪⎨⎧≥≤+≤++=0,102112108max 21212121x x x x x x x x z可得 Z=62元,X=(4,3)T但实际决策时,有可能考虑市场等其它方面因素,例如按重要性排序的下列目标:据市场信息,产品Ⅰ销售量下降,要求产品Ⅰ产量低于产品Ⅱ产量; 尽可能充分利用现有设备,但不希望加班; 达到并超过计划利润指标56元。
这样考虑生产计划问题即为多目标规划问题。
下面结合上述例题介绍有关建立目标规划数学模型的基本概念。
二、目标规划基本概念1. 设x 1,x 2为决策变量,并引入正、负偏差变量d +、d —正偏差变量d +表示决策值超过目标值的部分;负偏差变量d —表示决策值未达到目标值的部分,d +,d -≥0。
决策值不可能既超过又未达到目标值,因此恒有d +×d -=0。
2.绝对约束和目标约束绝对约束指必须严格满足的“≤,≥,=” 约束,称为硬约束,例如线性规划中的约束,不满足它们的约束称为非可行解;目标约束是目标规划所特有的,它把约束的右端常数项看作追求的目标值,允许出现正、负偏差,用“d +、d -”表示,称为软约束。
约束的一般形式为:i i i j iij g d d X C =-++-∑式中i g ——第i 个目标约束的目标值;ij C ——目标约束中决策变量的参数;+-i i d d 、——以目标值i g 为标准而设置的偏差变量。
第三章:计划与决策经典案例
案例一:宏远实业发展有限公司进入12月份以后,宏远实业发展有限公司(以下简称宏远公司)的总经理顾军一直在想着两件事:一是年终已到,应抽个时间开个会议,好好总结一下一年来的工作。
今年外部环境发生了很大的变化,尽管公司想方设法拓展市场,但困难重重,好在公司经营比较灵活,苦苦挣扎,这一年总算摇摇晃晃走过来了,现在是该好好总结一下,看看问题到底在哪儿。
二是该好好谋划一下明年怎么办?更远的该想想以后5年怎么干,乃至于以后10年怎么干?上个月顾总从事务堆里抽出身来,到淮海大学去听了两次关于现代企业管理的讲座,教授的精彩演讲对他触动很大。
公司成立至今,转眼已有10多个年头了。
10多年来,公司取得过很大的成就,靠运气、靠机遇,当然也靠大家的努力。
细细想来,公司的管理全靠经验,特别是靠顾总自己的经验,遇事都由顾总拍板,从来没有公司通盘的目标与计划,因而常常是干到哪儿是哪儿。
可现在公司已发展到有几千万资产,三百来号人,再这样下去可不行了。
顾总每想到这些,晚上都睡不着觉,到底该怎样制订公司的目标与计划呢?这正是最近顾总一直在苦苦思考的问题。
宏远公司是一家民营企业,是改革开放的春风为宏远公司的建立和发展创造了条件。
因此顾总常对职工讲,公司之所以有今天,一靠他们三兄弟拼命苦干,但更主要的是靠改革开放带来的机遇。
15年前,顾氏三兄弟只身来到了省里的工业重镇A市,当时他们口袋里只有父母给的全家的积蓄800元人民币,但顾氏三兄弟决心用这800元钱创一番事业,摆脱祖祖辈辈日出而作、日落而归的脸朝黄土、背朝天的农民生活。
到了A市,顾氏三兄弟借了一处棚户房落脚,每天分头出去找营生,在一年时间里他们收过破烂,贩过水果,打过短工,但他们感到这都不是他们要干的。
老大顾军经过观察和向人请教,发现A市的建筑业发展很快,城市要建设,老百姓要造房子,所以建筑公司任务不少,但当时由于种种原因,建筑材料却常常短缺,因而建筑公司也失去了很多工程。
顾军得知,建筑材料中水泥、黄沙都很缺。
黑龙江省 全省 水土保持规划

第一章基本情况黑龙江省位于我国东北边陲。
北面和东面分别以黑龙江和乌苏里江与俄罗斯为界,西部与内蒙古自治区接壤,南部和吉林省毗邻。
西起东经121°13′,东到东经135°,北自北纬53°24′,南到北纬43°22′,东西跨越14个经度,南北纵距10个纬度。
总土地面积为45.46万平方公里。
第一节自然条件一、地质、地貌我省大体为“五山一水一草三分田”。
地貌基本轮廓是由三大山系和两大平原组成。
1、大兴安岭山地。
高耸于我省西北部,成为内蒙高原与我省西部屏障。
地势东侧陡峭,河流水势旺盛,相对高差在400米左右,自南向北逐渐升高,呈阶梯状地理景观,山体由火成岩构成,为我省深山密林区。
面积约8万平方公里,地面坡度大体为5°—15°。
2、小兴安岭山地。
位于我省北部,北接大兴安岭,东至黑龙江,南至松花江,相对高差200米左右。
地貌成因为第三纪及第四纪的上升运动与玄武岩的喷发,在上升以前又具有准平原状态,玄武岩掩盖于平原,地势南部较比北部略高,整个山体外貌和缓,河谷宽阔,河流的侵蚀是构成地貌的最主要外力。
沟壑密度在0.1公里/平方公里左右,面积为8.43万平方公里,地面坡度多为5°─25°。
3、完达山、张广才岭、老爷岭山区。
位于我省东南部,地貌类型属于中山和低山,相对高差在400米左右,山脊平缓,山间盆地、宽谷、旱谷发育,山区和平原周围,有冰川作用的痕迹。
沟壑密度在0.4公里/平方公里左右,面积9.7万平方公里,地面坡度为5°—25°。
4、松嫩平原。
位于我省中西部,相对高差在60米左右,呈菱形的凹形盆地,西部较深,东部较浅,坡长坡缓,嫩江右岸冲积平原波状起伏,成土母质为洪积和冲积物,大部分开垦为耕地。
嫩江左岸为盆形闭流区,沼泽地、盐碱地多。
西部沙丘甚为发达,与盐碱地、沼泽地错综罗列,构成大片荒地为天然牧场。
沟壑密度在0.5公里/平方公里左右,地面坡度大部分为3°— 5°,面积为13.33万平方公里。
《运筹学》教案-目标规划数学模型

《运筹学》教案-目标规划数学模型第一章:目标规划概述1.1 目标规划的定义与意义1.2 目标规划与其他规划方法的区别1.3 目标规划的应用领域1.4 目标规划的发展历程第二章:目标规划的基本原理2.1 目标规划的基本假设2.2 目标规划的数学模型2.3 目标规划的求解方法2.4 目标规划的评估与决策第三章:目标规划的数学模型3.1 单一目标规划模型3.2 多目标规划模型3.3 带约束的目标规划模型3.4 动态目标规划模型第四章:目标规划的求解方法4.1 线性规划求解方法4.2 非线性规划求解方法4.3 整数规划求解方法4.4 遗传算法求解方法第五章:目标规划的应用案例5.1 生产计划目标规划案例5.2 人力资源规划目标规划案例5.3 投资组合目标规划案例5.4 物流配送目标规划案例第六章:目标规划的高级应用6.1 目标规划在供应链管理中的应用6.2 目标规划在项目管理中的应用6.3 目标规划在金融管理中的应用6.4 目标规划在能源管理中的应用第七章:目标规划的软件工具7.1 目标规划软件工具的介绍7.2 常用目标规划软件工具的操作与应用7.3 目标规划软件工具的选择与评估7.4 目标规划软件工具的发展趋势第八章:目标规划在实际问题中的应用8.1 目标规划在制造业中的应用案例8.2 目标规划在服务业中的应用案例8.3 目标规划在政府决策中的应用案例8.4 目标规划在其他领域的应用案例第九章:目标规划的局限性与挑战9.1 目标规划的局限性分析9.2 目标规划在实际应用中遇到的问题9.3 目标规划的发展趋势与展望9.4 目标规划的未来研究方向10.1 目标规划的意义与价值10.2 目标规划在国内外的发展现状10.3 目标规划在未来的发展方向10.4 对运筹学领域的发展展望重点和难点解析重点环节一:目标规划的数学模型补充和说明:在讲解目标规划的数学模型时,重点关注单一目标规划模型和多目标规划模型的构建。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第三章 目标规划 第一节 目标规划的数学模型目标规划法是求一组变量的值,在一组资源约束和目标约束条件下,实现管理目标与实际目标之间的偏差最小的一种方法。
应用目标规划法解决多种目标决策问题时,首先要建立目标规划模型。
目标规划模型由变量、约束和目标函数组成。
为具体说明目标规划与线性规划在处理问题方法上的区别,先通过例子介绍目标规划的有关概念及数学模型。
一、举例例 1 某厂生产Ⅰ、Ⅱ两种产品,已知计划期有关数据如下,求获利最大的生产方案。
生产有关数据表ⅠⅡ 拥有量 原材料 (公斤) 2 1 11 设备台时(小时) 利润 (元/件) 1 82 1010用线性规划方法求解:设Ⅰ、Ⅱ两种产品产量分别为x 1,x 2⎪⎩⎪⎨⎧≥≤+≤++=0,102112108max 21212121x x x x x x x x z可得 Z=62元,X=(4,3)T但实际决策时,有可能考虑市场等其它方面因素,例如按重要性排序的下列目标:据市场信息,产品Ⅰ销售量下降,要求产品Ⅰ产量低于产品Ⅱ产量; 尽可能充分利用现有设备,但不希望加班; 达到并超过计划利润指标56元。
这样考虑生产计划问题即为多目标规划问题。
下面结合上述例题介绍有关建立目标规划数学模型的基本概念。
二、目标规划基本概念1. 设x 1,x 2为决策变量,并引入正、负偏差变量d +、d —正偏差变量d +表示决策值超过目标值的部分;负偏差变量d —表示决策值未达到目标值的部分,d +,d -≥0。
决策值不可能既超过又未达到目标值,因此恒有d +×d -=0。
2.绝对约束和目标约束绝对约束指必须严格满足的“≤,≥,=” 约束,称为硬约束,例如线性规划中的约束,不满足它们的约束称为非可行解;目标约束是目标规划所特有的,它把约束的右端常数项看作追求的目标值,允许出现正、负偏差,用“d +、d -”表示,称为软约束。
约束的一般形式为:i i i j iij g d d X C =-++-∑式中i g ——第i 个目标约束的目标值;ij C ——目标约束中决策变量的参数;+-i i d d 、——以目标值i g 为标准而设置的偏差变量。
线性规划问题的目标函数,在给定目标值和加入正、负偏差变量后可变为目标约束;同样,线性规划问题的绝对约束,加入正、负偏差变量后也可变为目标约束。
例如,例1中线性规划问题的目标函数:Z = 8 x 1 + 10x 2 ,可变换为目标规划问题中的目标约束:8 x 1 + 10x 2 =56 + d +-d - ;而同样,线性规划问题的绝对约束:2x 1 + x 2 ≤11,可变换为目标规划问题中的目标约束:2x 1 + x 2 = 11-d - 。
建立约束需注意的问题时:(1)对于绝对约束,i g 则为资源限制值,上式中不加+-i i d d 、。
(2)非负约束是指偏差变量非负,0≥+-i i d d 、,至于决策变量是否要求非负,依具体问题要求决定。
(3)在目标规划约束中,凡已列入目标约束的资源约束,不应再列入资源约束。
(4)如果有明显的目标要求,可在+-i i d d 和中只选一个。
3.优先级与权系数要解决的规划问题往往有多个目标,而决策者对于要达到的目标是有主次之分的。
要求首先达到的目标赋予优先级P 1,稍次者赋予P 2 ,…。
这里规定:不同级目标重要性差异悬殊,P k >> P k+1,即先保证上一级目标实现的基础上再考虑下一级目标,低级目标的多大收获也不能弥补高级目标的微小损失。
若要区别具有相同优先级的目标的差别,可赋予不同的权系数w j 。
4.目标函数目标规划问题的目标函数是由各目标约束不同的正、负偏差变量d +、d -,优先级P k 与权系数w j 所构成的。
与线性规划不同的是目标函数中不含决策变量x j 。
当各目标值确定之后,决策者希望的是尽可能缩小对目标值的偏离。
因此,目标规划问题的目标函数只能是:Min Z = f (d +,d -)。
其基本形式有下列三种:要求恰好达到目标值,即正、负偏差变量都应尽可能的小,这时目标函数的形式:min Z = f (d + + d -)要求不超过目标值,即正偏差变量应尽可能的小,这时目标函数的形式: min Z = f (d + )要求超过目标值,即负偏差变量应尽可能的小,这时目标函数的形式: min Z = f ( d -)由此可见,目标规划比线性规划体现了新的灵活思想,约束和目标都不看作是绝对的。
决策者根据要求赋予各目标不同的优先级、权系数,构造目标函数。
下面举例说明。
例2 某构件公司商品混凝土车间生产能力为20t/h ,每天工作8h ,现有2个施工现场分别需要商品混凝土A 为150t ,商品混凝土B 为100t ,两种混凝土的构成、单位利润及企业所拥有的原材料见下表所示,现管理部门提出:原材料消耗、拥有量R 单位利润表(1)充分利用生产能力; (2)加班不超过2h ;(3)产量尽量满足两工地需求; (4)力争实现利润2万元/天试建立目标规划模型拟定一个满意的生产计划。
解: 1.确定变量设21x x 、分别为两种混凝土的产量。
2.约束条件 (1)目标约束:1P 级:要求生产能力充分利用,即要求剩余工时越小越好。
1601121=-+++-d d x x 其中要求01→-d2P 级:要求可以加班,但每日不超过2h ,即日产量不超过200t 。
2002221=-+++-d d x x 其中要求02→+d3P 级:两个工地需求尽量满足,但不能超过需求。
15031=+-d x 其中要求03→-d10042=+-d x 其中要求04→-d因需求量不能超过其需求,故++43d d ,=04P 级:目标利润超过2万元。
20000801005521=-+++-d d x x 其中要求05→-d(2)资源约束水泥需求不超过现有资源:5025.035.021≤++x x砂需求不超过现有资源:1306.055.021≤++x x(3)非负约束)521(00021,,,、,,Λ=≥≥≥+-i d d x x i i3.目标函数依目标约束中的要求,第三层目标中有两个子目标,其权数可依其利润多少的比例确定,即100:80,故W 1=5,W 2=4。
故目标函数为---+++++=544332211min )45(d P d d P d P d P Z整理得该问题的目标规划模型为:目标:---+++++=544332211min )45(d P d d P d P d P Z 约束条件:1601121=-+++-d d x x 2002221=-+++-d d x x15031=+-d x10042=+-d x20000801005521=-+++-d d x x5025.035.021≤++x x 1306.055.021≤++x x)521(00021,,,、,,Λ=≥≥≥+-i d d x x i i例 3 例1的决策者在原材料供应受严格限制的基础上考虑:产品Ⅰ产量低于产品Ⅱ产量;其次,尽可能充分利用现有设备,但不希望加班;再次,达到并超过计划利润指标56元,求决策方案。
解 按决策者的要求,分别赋予三个目标不同的优先级P 1,P 2,P 3。
然后建立目标规划模型如下:min z = P 1d 1+ + P 2(d 2++d 2-) + P 3d 3- 2x 1 + x 2 ≤ 11 x 1-x 2 + d 1-- d 1+ = 0 x 1 +2x 2 + d 2-- d 2+ = 10 8x 1 +10x 2 + d 3--d 3+ = 56x 1,x 2,d i -,d i + ≥ 0, i = 1,2,3目标规划数学模型的一般形式:⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=≥==≥≤==-++=+-=+-=++=--=∑∑∑∑n j d d x m i b x a K k g d d x c d w d w p z k k j n j i j ij k k k n j j kj k lk Kk k lk Ll l ,,2,1,0,,,,2,1,),(,,1,)(min 1111ΛΛΛ建立目标规划数学模型时,需要确定目标值,优先级,权系数等,它们都具有一定的主观性,模糊性,通常采用专家评定法给予量化。
第二节 目标规划的图解法对于只有两个决策变量的目标规划数学模型,可采用图解法分析求解,这对于了解目标规划一般问题的解题思路也很有帮助。
下面用例2加以说明。
类似于线性规划,先在平面直角坐标系第一象限绘出各约束条件。
绝对约束的作图与线性规划相同,对于目标约束,先绘出d i +,d i -= 0对应的直线,然后在直线旁相应侧标注d i +,d i -,如图3-1所示。
根据目标函数中的优先级对下图进行分析,即可找到满意解(由于目标规划问题常出现非可行解,因此称目标规划问题的最优解为满意解)。
图3-1例2的目标规划的图解由图可见,首先考虑绝对约束:2x 1 + x 2 ≤11,解的可行域为三角形 0AB ,然后按优先级P 1,目标函数中要求min d 1+,解域缩减至0BC 内;再按优先级P 2,目标函数中要求min (d 2++d 2-),解域缩减至线段ED 上;最后按优先级P 3,目标函数中要求min d 3-,因此最终满意解域为线段GD 。
可求得相应坐标:G (2,4),D (10/3,10/3)。
GD 的凸线性组合都是该目标规 划的解。
目标规划问题求解时,把绝对约束作为最高优先级(但不必赋P 1)例中能依次满足d 1+=0,d 2++d 2-=0 d 3-=0,因此z *=0。
但大多数情况下并非如此,还可能出现矛盾,这可以通过下面的例子加以说明。
FE例3某电子设备厂装配A、B两种型号同类产品,每装配一台需占用装配线1小时。
每周装配线开动40小时,预计每周销售:A产品24台,每台可获利80元;B产品30台,每台可获利40元。
该厂确定的目标为:第一目标:充分利用装配线每周开动40小时;第二目标:允许装配线加班,但加班时间每周不超过10小时;第三目标:装配数量尽量满足市场需求。
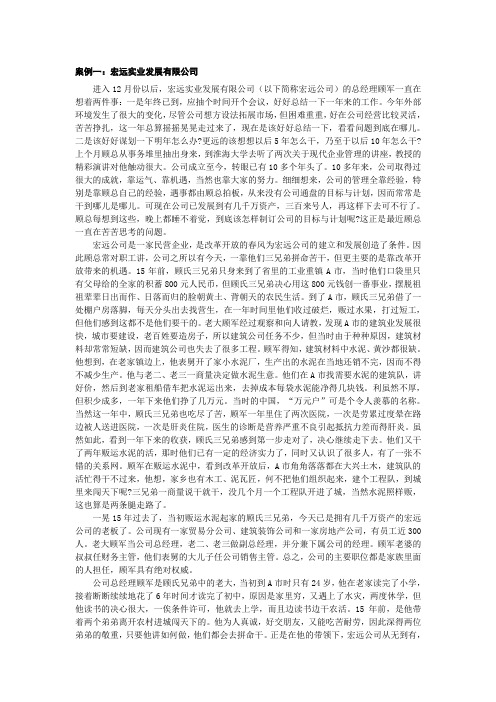
要求建立上述问题的数学模型并求解。
解设x1,x2分别为产品A、B的计划产量。
对于第三目标,由于每台A 产品利润是B产品的2倍,因此取其权系数分别为2,1。
建立目标规划模型:min z = P1d1-+ P2d2+ + P3(2d3-+d4-)x1 + x2 + d1--d1+ = 40x1+ x2 + d2--d2+ = 50x1 + d3--d3+ = 24x2 + d4--d4+ = 30x1,x2,d i-,d i+≥0,i = 1,2,3,4图3-2 例3的目标规划的图解由图3-2可见,在考虑了第一目标和第二目标之后,x1和x2的取值范围为ABCD。