测量学 第六章 定向测量
测量学—内容大纲
第九章 地形图的应用
第十章 测设的基本工作
第十一章 建筑施工测量
退出
第一章 绪论 第二章 水准测量 第三章 角度测量
第一节 水平角测量原理
第二节 光学经纬仪的构造 第三节 经纬仪的使用 第四节 水平角的测量方法
第五节 垂直角的测量方法 第六节 经纬仪的检验与校正
第七节 角度测量误差与注意事项
第一节 已知水平距离、水平角和高程的测设 第二节 点的平面位置的测设方法 第三节 已知坡度线的测设
第十一章 建筑施工测量
退出
第一章 绪论 第二章 水准测量 第三章 角度测量 第四章 距离测量与直线定向 第五章 测量误差的基本知识 第六章 小地区控制测量 第七章 大比例尺地形图的基本知识 第八章 大比例尺地形图的测绘 第九章 地形图的应用 第十章 测设的基本工作 第十一章 建筑施工测量
《建筑工程测量》
第一章 绪论 第二章 水准测量 第三章 角度测量 第四章 距离测量与直线定向 第五章 测量误差的基本知识
第六章 小地区控制测量
第七章 大比例尺地形图的基本知识 第八章 大比例尺地形图的测绘 第九章 地形图的应用 第十章 测设的基本工作 第十一章 建筑施工测量
退出
第一章 绪论
第一节 建筑工程测量的任务
第一节 测图前的准备工作 第二节 视距测量 第三节 地形图的测绘 第四节 地形图的拼接、检查与整饰
第九章 地形图的应用 第十章 测设的基本工作 第十一章 建筑施工测量
退出
第一章 绪论 第二章 水准测量 第三章 角度测量 第四章 距离测量与直线定向
第五章 测量误差的基本知识 第六章 小地区控制测量 第七章 大比例尺地形图的基本知识 第八章 大比例尺地形图的测绘
测量-直线定向

相互间关系: 相互间关系:
(1)真方位角A=磁方位角Am+磁偏角δ 真方位角A=磁方位角A A=磁方位角 磁偏角δ =坐标方位角α+子午线收敛角γ 坐标方位角α 子午线收敛角γ 坐标方位角α =Am 坐标方位角α =Am+δ- γ (2)同一直线正反坐标方位角相差180°,即: 同一直线正反坐标方位角相差180°
子午线收敛角(mapping 2、子午线收敛角(mapping angle)γ 当坐标北方向在真子午线以 当坐标北方向在真子午线以 子午线 称为东偏, 为正 为正。 东,称为东偏,γ为正。反 之称为西偏, 为负 为负。 之称为西偏,γ为负。可见 在中央子午线上, 在中央子午线上,真子午线 与坐标北方向重合, 与坐标北方向重合,其他地 区不重合, 区不重合,两者的夹角即为 γ。 。
2.正、反坐标方位角
X 例1 78Λ20Μ24Ν 已知 αCD= 78Λ20Μ24Ν, =326Λ12Μ30Ν αJK=326Λ12Μ30Ν, 求 αDC ,αKJ: =258Λ20Μ24Ν 解:αDC=258Λ20Μ24Ν =146Λ12Μ30Ν αKJ=146Λ12Μ30Ν A Y αAB B αAB αBA
XB − XA
o o
o o
= 92 18'+220 54'−180 = 133 12'
o
5.2.4 象限角
测量上有时用象限角来确定直线的方向。所谓象限角, 测量上有时用象限角来确定直线的方向。所谓象限角, 就是由标准方向的北端或南端起量至某直线所夹的锐 角,常用R表示。 常用R表示。 角值范围: 90° 角值范围:0°~ 90° 由于象限角可自标准方向的北端量起, 由于象限角可自标准方向的北端量起 , 也可自其 南端量起;可以向东量,也可以向西量。 南端量起;可以向东量,也可以向西量。所以象限角 除注明角度的大小外,还必须注明角度所在的象限。 除注明角度的大小外,还必须注明角度所在的象限。
矿山测量学--第六章 直线定向
真方位角A与坐标方位角α之间的关系,如图6.5所示,可用下式进行换算 A12 = α12 + γ
(三)坐标方位角与磁方位角的关系
若已知某点的磁偏差δ与子午线收敛角γ,则
坐标方位角α与磁方位角Am之间的换算式为 α = Am + δ - γ
3、 正、反坐标方位角
如图6.6,直线AB的点A是起点,点B是终点;通过起点A的坐标纵
前进方向
x x
α12 1
2 β2
α23
β3 3
x
4
α34
由图中分析可知:
x
前进方向
x
α23 2 α12 α21 β2 3 β3
x
4 α34
1
α32
23 21 2 12 180 2 34 32 3 23 180 3
α45=α34+180°-β4
= -10° <0° (- 10°+360°) 350°
如图6.7,B、A为已知点,AB边的坐标方位角αAB 为已知,通过连测求得A-B边与A-1边的连接角为β′, 测出了各点的右(或左)角βA、β1、β2和β3,现在要 推算A-1、1-2、2-3和3-A边的坐标方位角。所谓右 (或左)角是指位于以编号顺序为前进方向的右(或左) 边的角度。
象限 名称 由方位角α 求象限角R 由象限角R求方位角α Ⅰ 北东(NE) R=α α =R Ⅱ 南东(SE) R=180°-α α =180°-R Ⅲ 南西(SW) R=α -180° α =180°+R Ⅳ 北西(NW) R=360°-α α =360°-R
思考题
1 为什么要进行直线定向?怎样确定直线方向? 2 何谓方位角与象限角? 3 何谓子午线收敛角和磁偏角?已知某地的磁偏角为-5°15′, 直线AB的磁方位角为134°10′,试求AB直线的真方位角。 4 已知α AB =50°10′,R CD =S30°15′W, 试求RAB和α CD。
第6章:地籍控制测量

第二节 地籍测量坐标系
(四)平面坐标转换 坐标转换是指某点位置由一坐标系的坐标转换成另一
坐标系的坐标的换算工作,也称为换带计算。它包括6° 带与6°带之间、3°带与3°带之间、3°带与6°带之间 以及3°(6°)与任意投影带之间的坐标转换。 坐标转换计算(也称换带计算)利用高斯正、反算公 式(即高斯投影函数式)进行。 具体做法是:先根据点的坐标值(X,Y),用投影反 算公式计算出该点的大地坐标值(L,B),再应用投影正算 公式换算成另一投影带的坐标值(X',Y')。
第二节
地籍测量坐标系
一、大地坐标系(《测量学》课程已讲) 二、高斯平面直角坐标系
(一)高斯平面直角坐标系的原理(《测量学》课程已 讲) (二)高斯投影带的划分(《测量学》课程已讲)
(三)高斯投影长度变形
长度变形处理步骤:测量工作总是把直接测得的边长首 先归算到参考椭球面上,然后再投影到高斯投影平面上。
测角中 误差/(")
方位角 闭合差 /(")
距离 测回 数 2 2
四、图根控制测量
1、图根导线的步设技术要求
附合导 线长度 /km 测角中 ቤተ መጻሕፍቲ ባይዱ差/ (") 导线全长 相对闭合 差 水平角观 测测回数 DJ2 DJ6 方位角 闭合差 /(")
等级
平均边 长/m
测距中误 差/mm
距离测 回数
一级
二级
100
S -78.5mm 0.006mm 0.001mm -78.5mm
(2)高斯投影长度变形 参考椭球面上的长度投影到高斯平面上长度变形大小计算公式
1 Y S 2 R
m
2
S
第二节
距离测量与直线定向工程测量

式中: lt——温度为t时的钢尺实际长度 l0——长尺名义长度
Δl0——钢尺尺长改正值 α——钢尺膨胀系数,一般为 1.15×10-5~ 1.25×10-5
t0——钢尺检定时的温度 t——量距时的温度
例如 lt 30 0.006 1.25 10 5 (t 20oC) 30
钢尺量距劳动强度大,工作效率低,精度不高。光电 测距仪具有测程远、精度高、作业速度快等优点。
(1)按载波分类
微波测距仪 激光测距仪
红外测距仪 }光电测距
(2)按测程分类 短程 D 3km 中程 3km D 15km 远程 D 15km
第20页/共38页
(3)按测距精度分:
Ⅰ级:︱mD︱≦5mm Ⅱ级:5mm≦ ︱mD︱ ≦ 10mm
第15页/共38页
§4.2 视距测量
• 视距测量是一种间接测距方法,它是利用望远镜 内十字丝分划板上的视距丝(上、下丝)及标尺
一(平、水距视准离线尺和水),高平根差时据的的光一视学种距原简测理易量同方计时法算测公定式两地面点间水
D kl 100l
hAB i v
第16页/共38页
二、视线倾斜时的视距测量计算公式
例:A、B两点间用钢尺量距,往测距离为189.386m,返 测距离为189.325m,则其相对误差为:
189.386 189.325 K
1
<
189.356
3100
第8页/共38页
1 3000
2.倾斜地面量距方法
(1)平量法
(2)斜量法
D Lcos L2 h2
α
第9页/共38页
钢尺检定与尺长方程式 1.钢尺检定
• (3)用中丝对仪器高(以使),调竖盘指标水准管气泡 居中(有竖盘指标自动补偿器的经纬仪,无需此项操作), 读取竖盘读数,再计算竖直角。
测量学—直线定向
在第Ⅲ象限 R 180 在第Ⅳ象限 R 360
返回
1.正、反坐标方位角
x(N)
xபைடு நூலகம்
x
B
αBA
αAB
A
O
y
正、反坐标方位角间的关系为:
AB BA 180
2.坐标方位角的推算
x
x
x
α23
2 α21
4 α34
α12
β3
β2 1
3
α32
23 21 2 12 180 2 34 32 3 23 180 3
推算坐标方位角的一般公式为:
x(N)
4
Ⅳ (W)
Ⅲ 3
RO4 RO1 O
RO3 RO2
(S)
1 Ⅰ Ⅱ 2
y(E)
2.坐标方位角与象限角的换算关系
x(N)
αO1 RO1
O
1 Ⅰ
y(E)
x(N)
αO2 y(E)
O
Ⅱ
RO2 2
(S)
x(N)
4
(W)
Ⅲ
3
O
αO3
Ⅳ
y
(W)
RO3
(S)
x(N)
RO4
Oy
αO4
在第Ⅰ象限 R 在第Ⅱ象限 R 180
第五节 直线定向
一条直线的方向,是根据某一标准方向 来确定的。
确定直线与标准方向之间的关系,称为 直线定向。
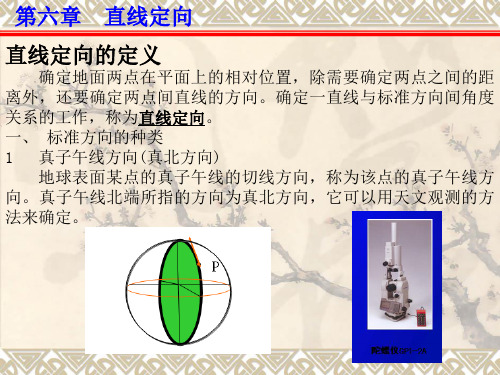
一、标准方向的种类
1.真子午线方向
通过地球表面某点的真子午线的切线方向,称为该点 的真子午线方向。
2.磁子午线方向
磁子午线方向是在地球磁场作用下,磁针在某点自由 静止时其轴线所指的方向。
3.坐标纵轴方向
测量学知识点
丝平面不重合,视差的存在会影响到读数的正确性。
消除视差的方法是重新仔细的进行物镜对光,直到眼睛上下移动,读数不变为止。
28.相邻两个水准点间的路线称为测段,其中包括若干个测站。
而且中间有许多转点,起到了传递高程的作用。
29.P17 表2-1与2-2大家自己看懂看会。
30.测站检核:变动仪器高法,双面尺法。
31.高差闭合差:实测值减去理论值。
32.高差改正数:见课本P21,还有表格2-333.水准测量的误差:仪器误差,测量误差,外界条件的影响。
34.测量水平角:要求文字、公式、画图都得明白其原理。
测量水平角:测回法(观测单角)P38 表3-1,方向观测法(多个)P40 表3-235.测量水平角的步骤:对中,目的使仪器的中心与测站点位于同一铅垂线上。
整平,目的使竖轴垂直与水平度盘水平。
瞄准。
36.在方向观测法中出现了:两倍照准差2c 2c=盘左读数-(盘右读数±180度),平均读数=0.5(盘左读数+盘右读数±180度)37.测量竖直角:要求文字、公式、画图都得明白其原理。
P4138.测量竖直角:注意先将望远镜上扬一下,看看度盘是否大于90度,若是大于90度,则以后的测量工作盘左读数就是度盘读数-90度,盘右就是270度-读数,若是小于90度,则反之。
39.竖盘指标差:X=0.5(R+L-360度),R、L分别是盘左盘右读数。
40.水平角的误差:仪器误差,对轴误差与目标偏心(目标点与立仪器点长度越长,误差越大),观测误差,外界条件的影响。
41.直线定线:把多根标杆标定在已知直线上的工作。
42.测量距离的相对误差:(D往-D返)/D平均,方法:平量法,斜量法。
43.直线定向:确定直线与标准方向之间的水平角度44.真子午线方向(非平行),磁子午线方向(非平行),坐标纵轴方向(平行)。
P6745.方位角定义:有标准方向的北端起,顺时针方向量到某直线的夹角。
真方位角就是北方向顺时针到这一点真子午线的夹角。
测量学第6章控制测量

C D
X D 165.418 YD 767.160
§6-6 高程控制测量 高程控制测量
确定控制点的高程(H)
一、概述
1. 高程控制网的等级
• 国家高程控制网: 分为一、二、三、四等。一、二等水准
网是国家高程控制的基础,三、四等加密 其中。 • 加密高程控制:
五等(等外或图根)
左角——所测相邻边的水平夹角在前进方向的左边
右角——所测相邻边的水平夹角在前进方向的N右边
推算公式 αBC = αAB +β左± 180° αBC= αAB -β右± 180°
N AB
A
左 B
右
BC ?
C
三、坐标的正、反算
1 、 坐标的正算
x
已知A点的坐标 X A 、 y A ,直线AB 的平距 SAB 和坐标方位角 AB ,计
-24.12 +238.07 +80.30 -83.88 -210.37
+200.18 +112.65 -227.16 -182.02 +96.35
100.00 75.88 313.95 394.25 310.37 100.00
100.00 300.18 412.83 185.67
3.65 100.00
DJ6
2
±30″ ±36″ ±24″ ± 60 n
四、导线测量的内业计算
内业计算目的
利用已知数据和外业观测成果,计算导 线点的平面直角坐标(X,Y)。
1、导线计算前的准备工作
(1)全面检核外业原始观测数据记录、计算是否 齐全、正确、限差是否合格。
(2)抄录已知数据(已知点坐标,方位角等)。 (3)绘导线略图(注明点号、角度、边长)。 (4)准备应用的计算表格。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第六章定向测量
§6.1直线定向
确定直线与标准方向之间夹角关系的工作称为直线定向。
一、标准方向的种类
1.真子午线方向
地面上某点的真子午线的切线方向称为该点的真子午线方向。
2.磁子午线方向
地面上某点的磁子午线的切线方向称为该点的磁子午线方向。
3.坐标纵轴方向
即X轴方向。
下图为三北方向及关系图。
二、表示直线方向的方法
1.方位角
由标准方向北端开始,顺时针方向量至某一直线的水平角值,称为该直线的方位角。
角值在0~360之间。
根据标准方向不同,方位角可分为:真方位角、磁方位角和坐标方位角
2.象限角
由标准方向线的北端或南端顺时针或逆时针量到某直线的水平夹角。
在0°~90°之间,用R表示。
§6.2 坐标方位角的推算
一、正反坐标方位角
︒±=180反正αα
二、坐标方位角的推算
左侧角:︒-+=180左后前βαα
右侧角:︒+-=180右后前βαα 计算结果为负,则加360°;计算结果超过360°,则减去360°。
§6.3 坐标计算原理
一、坐标增量
已知A 点坐标为(x A ,y A )、B 点坐标为(x B ,y B ),则可得出其坐标增量。
则:
A
B
AB
A
B
AB
y
y
y
x
x
x
-
=
∆
-
=
∆
AB
AB
AB
AB
AB
AB
D
y
D
x
α
α
sin
cos
=
∆
=
∆
二、坐标正算
已知A(x A,y A),D AB和αAB, 则可求B点坐标(x B,y B)。
AB
AB
AB
AB
AB
AB
D
y
D
x
α
α
sin
cos
=
∆
=
∆
AB
A
B
AB
A
B
y
y
y
x
x
x
∆
+
=
∆
+
=
三、坐标反算
已知A(x A,y A)和B(x B,y B), 求D AB和αAB。
A
B
A
B
AB
A
B
A
B
x
x
y
y
y
y
x
x
D
-
-
=
-
+
-
=
arctan
)
(
)
(2
2
α
根据A、B点的位置关系,在0°~360°范围内确定出实际方位角值。
§6.4 罗盘仪测定磁方位角
一、罗盘仪的构造
由磁针、度盘和瞄准设备三部分组成。
二、罗盘仪的使用
先将罗盘仪安置在直线的一端,使其水平(气泡居中),然后用缺口和准星瞄准直线另一端的标杆,磁针静止后读取磁方位角。
作业题:习题六:2 、5、7。