球杆系统的网络化控制设计与实现
基于球杆的控制系统分 析与设计实验教程
实验一 实验二 实验三 实验四 实验五 小 结
第三章
球杆控制系统分析设计提高 ................................. 32
实验一 实验二 实验三 实验四 实验五
1
前
言
自动控制理论是自动控制及相关专业的必修专业基础课, 自动控制理论实验是学习和掌 握控制系统分析和设计方法最有效的途径之一。 机电控制系统分析设计是机电类相关专业学生的培养目标, 如何从机电系统总体设计的 角度出发,以性能指标为依据,深入分析机械结构、电气部分、控制算法对机电系统性能指 标影响的情况,是机电类控制系统分析设计的主要内容之一。 控制系统分析的标准是仿真与实际测试的性能指标满足误差范围。 控制系统设计的标准是通过分析机械结构、 电气部分的特性, 选择控制算法达到系统最 好的性能指标。并为改进机械、电气、控制算法提出依据。 球杆系统是典型的单输入单输出的机电类控制系统, 通过改变平衡杆与水平方向的夹角, 而控制平衡杆上的滚动的小球位置。球杆系统实验现象直观、明显,不仅可以表现出很多控 制系统的基本概念如:跟随特性,鲁棒性等,而且很吸引学生注意力,是不可多得的实验平 台。 本实验教程根据球杆系统的数学模型, 以性能指标为依据, 通过比较控制系统仿真与实 现的现象不同,分析影响球杆控制系统性能指标的机械、电气因素,并改进以提高系统性能 指标。使学生了解和掌握机电控制系统分析、设计的基本原理和基本方法。 通过若干次的反复实践, 学生可以深入理解机电类控制系统分析、 设计的基本过程和概 念。 本教程不仅是一个关于自动控制的实验教程, 还是一个机电系统设计的实验教程, 主要 包含以下内容: 第一章,介绍机电控制系统的几个基本概念理解,在长期的教学中,控制系统概念主要 是不理解因而不会用。这几个概念会在后面的设计中用到。 第二章,球杆控制系统分析设计入门,从推导简化模型入手,设计控制器。通过分析实 际测试的性能指标和仿真的不同,引申出影响系统性能的因素。 第三章,通过深入分析影响球杆控制系统性能的因素,加入到仿真模型中,在和实际控 制系统模型比较后,设计出性能优异的控制系统。 本实验教程实验项目包括:系统建模和稳定性分析、PID 校正、根轨迹校正、频域法校 正、状态反馈共五个实验。 其中综合性实验 1 个,为 PID 校正;设计性实验 3 个,为根轨迹校正、频域法校正、 状态反馈;验证性实验 1 个,为系统建模和稳定性分析。综合性、设计性试验占全部实验的 比例为 80%。 经典控制理论实验为 4 个,系统建模和稳定性分析、PID 校正、根轨迹校正、频域法校 正。综合型设计性实验比例为 75%.现代控制理论实验为 1 个,状态反馈, 综合型设计性实 验比例为 100%。 本实验教材适用于机电类控制专业的本科学习自动控制理论应用和机电控制系统分析 设计课程,以及非机电类控制专业的研究生学习自动控制理论之用。
球杆控制系统设计与仿真XS07012040禹志
控制系统实践大作业球杆控制系统设计与仿真学号:XS07012040姓名:禹志球杆控制系统设计与仿真一球杆系统的数学模型球杆系统的物理模型如下图所示:图1:球杆系统模型在这个模型里,我们假设球在杆上只有纯滚动而没有滑动并且我们忽略球和杆之间的摩擦力。
我们定义这个模型中的变量和常量如下:m 球的质量0.1 kgR 球的半径0.02 md 轮的半径0.05 mg 重力加速度9.8 m/s^2L 杆长 1.0 mJ 球的转动惯量 1.0e-5 kgm^2r 球的位置α杆与水平的夹角θ伺服机构与水平的夹角表1:模型的变量和常量球杆系统的数学建模:系统的动能:222])r L [(m 21rm 21)R r(J 21T α-++= 系统的势能:α-=sin mgr U该系统的拉格朗日方程为:0rUr T )r T (dt d =∂∂+∂∂-∂∂ 通过拉格朗日法得到球的运动方程:0))(r L (m sin mg r)m RJ(22=α-+α-+ 若我们假设杆与水平的夹角是小角度且0≈α ,对上面的方程进行线性化,我们得到:α=+mg r)m RJ(2 杆的角度与伺服机构的角度的关系可以近似的线性化为:θ=αLd综合上面几个方程我们得到:θ=+Ldmg r)m R J (2对方程两边做拉普拉斯变换:)s (Ld mg s )s (R )m R J (22Θ=+ 整理后我们得到系统线性化后的开环传递函数:22s1)mRJ(Lmgd)s()s(R+=Θ二控制器的设计在这里,我们采用普遍使用的PID控制器。
整个系统的闭环框图可以表达为:图2:线性化后的控制框图令)S()S(R)S(HΘ=,得:)S(R)s(HSKSKSK))S(R)S(r(IP2D=⋅++-我们取pK=21,IK=0,DK=14,将球稳定在杆的中点,仿真结果如下图所示:图3:仿真结果通过仿真结果表明将系统线性化后,该系统的超调量小于1%,上升时间3秒。
实验5--球杆系统的数字PID控制实验

学生实验报告开课学院及实验室:学院机电年级、专业、班姓名学号实验课程名称计算机控制技术成绩实验项目名称实验5 球杆系统的数字PID控制实验指导教师一、实验目的1.熟悉Matlab\simulink软件;2.通过试凑法确定球杆系统的PID参数;3.在球杆系统上验证PID参数的控制效果。
二、使用仪器、材料1.球杆系统装置。
2.装有matlab2012b的计算机。
三、实验步骤1.现场实验前先用Matlab\simulink软件进行仿真。
给出球杆装置的理想传递函数(1)用Simulink设计出该系统的模型。
输入信号为阶跃信号,控制器选择PID。
(2)用试凑法确定出合适的PID参数。
(3)比较设置不同参数时系统的响应特性。
2.进行现场实验。
测试好现场装置后,试着将仿真后得出的几个PID参数输入到控制系统中,观察球杆装置的运行情况。
在现场调整参数使系统取得良好的控制效果。
(1)打开球杆系统电控箱上的电源按钮,在MATLAB/Current Folder 中打开文件系统自带程序“PID_ Control_Modify.slx”,会弹出如图所示的实时控制界面(2)双击“PID Controller”模块,设置Kp、Ki、Kd的参数,参数为仿真过程得出的参数。
双击“Step”模块,设置阶跃信号参数:step time=0,initial value=0,final value=0.25。
(3) 点击编译程序,待编译成功后,点击连接程序,点击运行程序,观察球杆和小球的运动现象。
待小球静止后,点击停止程序,打开示波器scope观察响应曲线的超调量,调节时间。
若能达到理想的控制效果,说明所设置的PID参数合理。
否则,根据波形呈现的超调量,调节时间,以及最终稳定后呈现的静差,调整PID参数,继续调试系统,最终达到理想的控制效果。
四、实验过程原始记录(程序、数据、图表、计算等)1.Simulink仿真程序框图如下:系统输入为阶跃信号,阶跃时间为0,初始值为0,终值定为1,采样时间为0.1。
1球杆系统
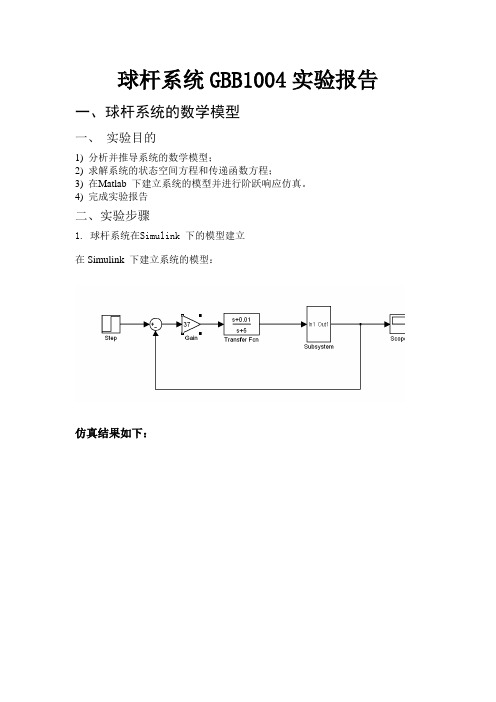
球杆系统GBB1004实验报告一、球杆系统的数学模型一、实验目的1) 分析并推导系统的数学模型;2) 求解系统的状态空间方程和传递函数方程;3) 在Matlab 下建立系统的模型并进行阶跃响应仿真。
4) 完成实验报告二、实验步骤1. 球杆系统在Simulink 下的模型建立在Simulink 下建立系统的模型:仿真结果如下:二、球杆系统的数字控制器实验报告一、实验目的学习使用根轨迹法设计一个稳定的系统,进一步理解根轨迹的基本概念和根轨迹图所代表的含义,通过实验来验证增加零、极点以及开环增益对系统性能有何影响。
二、实验步骤1、开环根轨迹实验程序:m=0.028;R=0.0145;g=-9.8;L=0.40;d=0.045;J=0.4*m*R^2;K=(m*g*d)/(L*(J/R^2+m));num=[-K]; den=[1 0 0];plant=tf(num,den);rlocus(plant)运行结果:2、可以看到系统在原点有两个极点沿虚轴伸向无穷远处使用sgrid 命令可以将设计目标也显示在根轨迹上m=0.028;R=0.0145;g=-9.8;L=0.40;d=0.045;J=0.4*m*R^2;K=(m*g*d)/(L*(J/R^2+m));num=[-K];den=[1 0 0];plant=tf(num,den);rlocus(plant)sgrid(0.7,1.9)axis([-5 5 -2 2])运行结果:3、超前补偿器;在上面那个程序前添加以下程序:zo=0.01;po=5;contr=tf([1 zo],[1 po])rlocus(contr*plant)sgrid(0.7,1.9)运行结果:4、现在,根轨迹的分支已经在设计目标范围内。
使用rlocfind 命令来确定系统的增益。
在m文件中加入以下几行[k,poles]=rlocfind(contr*plant)到图形显示窗口选择用十字形光标一点。
自动控制球杆系统实验指导书-2016资料
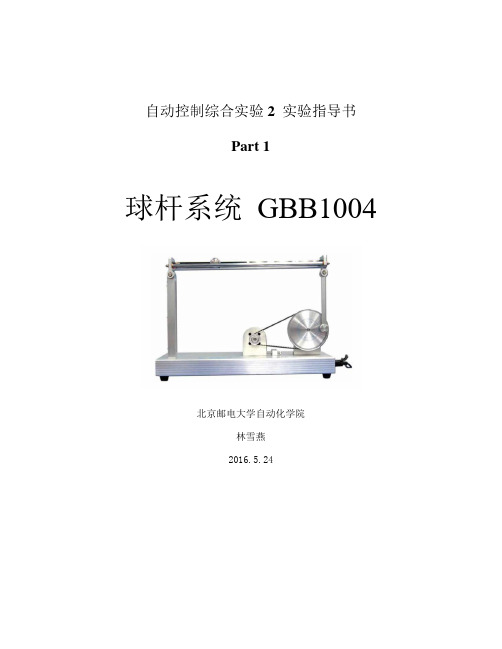
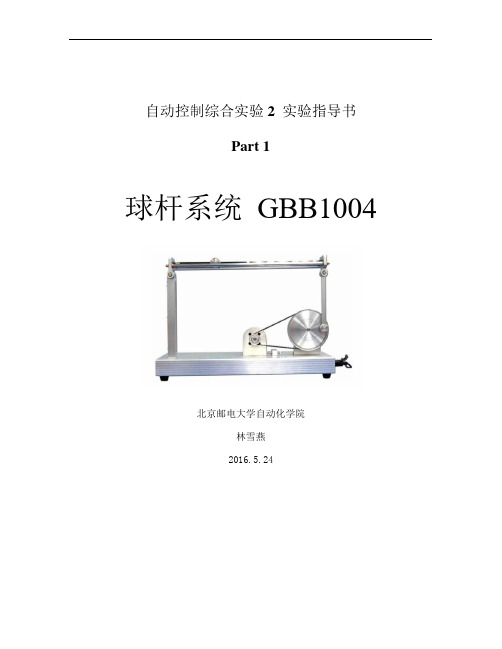
自动控制综合实验2 实验指导书Part 1球杆系统GBB1004北京邮电大学自动化学院林雪燕2016.5.24前言自动控制是一门理论与实践并重的技术,在成功掌握了理论知识(经典控制、现代控制)的同时再配合做一些经典的自动控制实验,从而加深对自动控制的理解与掌握,为今后从事自动控制的设计和研究工作打下扎实的基础。
为了更好地配合理论教学,达到理论与实践完美的结合,将自动控制相关的实验独立设置成一门实验课:自动控制综合实验。
自动控制理论实验主要目的是通过实验进一步理解自动控制理论的基本概念,熟悉和掌握控制系统的分析方法和设计方法,掌握常用工程软件使用,如MATLAB、LabVIEW 等。
上学期开设的自动控制综合实验(1)主要内容为控制系统的Matlab/simulink 仿真和基于实验箱的硬件模拟,以电路系统为研究对象。
本学期开始的自动控制综合实验(2)的内容是基于典型控制理论实验设备(球杆系统和倒立摆系统),熟悉和掌握控制系统的分析和设计方法。
球杆系统机械简单,结构紧凑,安全性高,采用智能伺服驱动模块和Windows 程序界面,可用于教学或科研。
对于自动控制理论等课程来说,针对设备的非线性与不稳定性特点,设计有效的控制系统是项有意义的工作。
球杆系统要完成的实验有:实验一:小球位置的数据采集处理实验二:球杆系统的PID法控制实验三:球杆系统的根轨迹法控制实验四:球杆系统的频率响应法控制倒立摆是一个典型的不稳定系统,同时又具有多变量、非线性、强耦合的特性,是自动控制理论中的典型被控对象。
运用控制手段可使之具有一定的稳定性和良好的性能。
许多抽象的控制概念如控制系统的稳定性、可控性、系统收敛速度和系统抗干扰能力等,都可以通过倒立摆系统直观的表现出来。
倒立摆系统要完成的实验有:实验五:倒立摆的数学建模及稳定性分析实验六:倒立摆的状态反馈控制实验七:不同状态下状态反馈控制效果比较实验八:倒立摆的LQR 控制同学们完成实验后,要完成相应的实验报告,并及时提交。
球杆系统控制器设计实验报告(北京理工大学)
球杆系统控制器设计实验报告学院:自动化学院组号:5成员:球杆系统控制器设计实验一、实验目的和要求1.1 实验目的(1)通过本设计实验,加强对经典控制方法(PID控制器)和智能控制方法(神经网络、模糊控制、遗传算法等)在实际控制系统中的应用研究。
(2)提高学生有关控制系统控制器的程序设计、仿真和实际运行能力.(3)熟悉MATLAB语言以及在控制系统设计中的应用。
1.2 实验要求(1)每两人一组,完成球杆系统的开环系统仿真、控制器的设计与仿真以及实际运行结果;(2)认真理解设计内容,独立完成实验报告,实验报告要求:设计题目,设计的具体内容及实验运行结果,实验结果分析、个人收获和不足,参考资料。
程序清单文件。
二、实验内容本设计实验的主要内容是设计一个稳定的控制系统,其核心是设计控制器,并在MATLAB/SIMULINK环境下进行仿真实验,并在球杆实验平台上实际验证。
算法实现:设计模糊控制器控制球杆系统,达到要求目标。
三、实验原理3.1 球杆系统的特点球杆系统是一个典型的非线性系统,理论上而言,它是一个真正意义上的非线性系统,其执行机构还具有很多非线性特性,包括:死区,直流马达和带轮的传动非线性,位置测量的不连续性,导轨表面不是严格的光滑表面,产生非线性阻力,这些非线性因素对于传统意义上的测量和建模造成很大的影响,并对系统的控制性能造成非常大的影响,怎样去设计一个鲁棒的控制系统,是现代控制理论的一个重要问题。
因为系统机械结构的特点,球杆系统具有一个最重要的特性——不稳定性,对于传统的实验方法,存在一些实验的难处,不稳定的系统容易对实验人员产生危险或是不可预料的伤害,球杆系统相对而言,机械比较简单,结构比较紧凑,安全性也比较高,是一个可以避免这些危险和伤害的实验设备。
3.2 球杆系统的数学模型对小球在导轨上滚动的动态过程的完整描述是非常复杂的,设计者的目的是对于该控制系统给出一个相对简单的模型,如图3.1所示为实验使用球杆系统简化图。
球杆系统控制器设计及MATLAB仿真
摘要以球杆系统作为主体,系统中的小球作为被控对象,设计一个模糊控制器,控制小球在装置导轨上的运行状态,分析小球在导轨上的运行状态,以此来反映模糊控制器的控制性能。
设计首先对球杆系统组成结构及其基本原理进行分析之后,建立一个相对简化后的球杆系统模型;运用相关的模糊控制原理,建立球杆系统模糊控制规则,再对球杆系统进行模糊控制器设计。
并在MATLAB仿真环境下建立控制器的仿真模型,对球杆系统进行仿真,测试模糊控制器的控制性能。
针对球杆系统自身存在的不稳定特性,在进行仿真时加入闭环反馈控制环节,这样不但可以提高系统的稳定性,还可以提高控制的精度,相较于其他一般控制,它更具有独特优势,更符合人类思维。
球杆系统作为如今研究控制理论的经典案例,与模糊控制融合之后,能更好地表现模糊控制在自动控制方面的优良特性。
关键词:球杆系统;模糊控制;MATLAB建模ABSTRACTIn the ball and beam system as the main body, the ball as a controlled object,design a fuzzy controller , to control the ball in the guide rail device running status. Analysis the ball movement on the guide rail, in order to reflect the fuzzy controller performance. First,the design analysis the composition structure and the basic principle of the ball and beam system , then establish a relatively simplified of the ball and beam system model; using the principle of fuzzy control, to establish fuzzy control rules of the ball and beam system, design a fuzzy controller to the ball and beam system. And in the MATLAB simulation environment, establish the simulation model of the controller, simulate the club system and test the control performance of the fuzzy controller.For the ball and beam system own existence the instability characteristics, in the simulation by adding closed loop feedback control link, which can not only improve the system stability, but also can improve the control accuracy, compared with other general control, it is more unique advantages, more in line with human thinking.Club system as a classic case in study control theory, and after fusion with fuzzy control, can performance the excellent characteristics of fuzzy control in the automatic control .Key words: the ball and beam system;fuzzy control;MATLAB modeling目录1 绪论 (1)1.1 课题背景和研究意义 (1)1.1.1 课题背景 (1)1.1.2 课题的研究意义 (1)1.2 模糊控制的发展及研究状况 (2)1.2.1 模糊控制论的产生与发展 (2)1.2.2 模糊控制论的研究和现状 (3)2 球杆系统建模及仿真 (5)2.1 球杆系统介绍 (5)2.1.1 系统简述 (5)2.1.2 系统组成 (5)2.2 球杆系统建模 (6)2.2.1 球杆系统数学模型建立 (6)2.3 MATLAB建模 (7)2.3.1 MATLAB软件介绍 (7)2.3.2 球杆系统在MATLAB的模型建立 (7)3 模糊控制器设计 (13)3.1 模糊控制器概述及原理 (13)3.2 模糊控制器结构 (13)4 球杆系统的模糊控制器设计 (15)4.1 模糊控制的实现 (16)4.1.1 各个变量个论域 (16)4.1.2 隶属度划分 (16)4.1.3 模糊规则的建立 (18)4.2 模型仿真 (20)结束语 (22)参考文献 (23)致谢 (24)1 绪论1.1 课题背景和研究意义1.1.1 课题背景如今的世界已经迎来一场重要的信息革命了,而模糊理论的发展正好充分的印证了这次革命的必要。
自动控制球杆系统实验指导书-2016教材
自动控制综合实验2 实验指导书Part 1球杆系统GBB1004北京邮电大学自动化学院林雪燕2016.5.24前言自动控制是一门理论与实践并重的技术,在成功掌握了理论知识(经典控制、现代控制)的同时再配合做一些经典的自动控制实验,从而加深对自动控制的理解与掌握,为今后从事自动控制的设计和研究工作打下扎实的基础。
为了更好地配合理论教学,达到理论与实践完美的结合,将自动控制相关的实验独立设置成一门实验课:自动控制综合实验。
自动控制理论实验主要目的是通过实验进一步理解自动控制理论的基本概念,熟悉和掌握控制系统的分析方法和设计方法,掌握常用工程软件使用,如MATLAB、LabVIEW 等。
上学期开设的自动控制综合实验(1)主要内容为控制系统的Matlab/simulink 仿真和基于实验箱的硬件模拟,以电路系统为研究对象。
本学期开始的自动控制综合实验(2)的内容是基于典型控制理论实验设备(球杆系统和倒立摆系统),熟悉和掌握控制系统的分析和设计方法。
球杆系统机械简单,结构紧凑,安全性高,采用智能伺服驱动模块和Windows 程序界面,可用于教学或科研。
对于自动控制理论等课程来说,针对设备的非线性与不稳定性特点,设计有效的控制系统是项有意义的工作。
球杆系统要完成的实验有:实验一:小球位置的数据采集处理实验二:球杆系统的PID法控制实验三:球杆系统的根轨迹法控制实验四:球杆系统的频率响应法控制倒立摆是一个典型的不稳定系统,同时又具有多变量、非线性、强耦合的特性,是自动控制理论中的典型被控对象。
运用控制手段可使之具有一定的稳定性和良好的性能。
许多抽象的控制概念如控制系统的稳定性、可控性、系统收敛速度和系统抗干扰能力等,都可以通过倒立摆系统直观的表现出来。
倒立摆系统要完成的实验有:实验五:倒立摆的数学建模及稳定性分析实验六:倒立摆的状态反馈控制实验七:不同状态下状态反馈控制效果比较实验八:倒立摆的LQR 控制同学们完成实验后,要完成相应的实验报告,并及时提交。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
( 9)
相应的有:
u( k - τsc + 1 | k - τsc) = ( 1 - C( z - 1 ) ) u( k - τsc +
1 | k - τsc) + D( z - 1 ) ( r( k - τsc + 1) - y( k - τsc +
1 | k - τsc) )
( 10)
依此可得递归算法:
1→u( k - τsc + 1 | k - τsc) 2→u( k - τsc + 2 | k - τsc)
图 1 网络化控制系统结构
Fig. 1 The networked control system
1) 预测控制序列生成器 考虑如下的 SISO 系
统:
y( k + 1)
=
B( A(
z z
-1) -1)
u(
k)
( 4)
式中,A( z - 1 ) = 1 + a1 z - 1 + a2 z - 2 + … + aan z - an ; B( z -1 ) = b0 + b1 z -1 + b2 z -2 + … + bbn z - bn 为系数多项
Abstract: Random time delay and packet dropout can degrade the performance of networked control systems and even cause system instability,especially for the Ball - Beam System of some natures such as instability in open - loop,and nonlinearity. To solve this problem,this paper adopts the networked predictive control ( NPC) method to design the ball - beam system networked control system. The principle of NPC is described,the modeling of the ball - beam system with identification method is explained,and the simulation and experiment results are provided to verify the effectiveness of the proposed design scheme. Key words: networked control systems; ball - beam system; predictive control; nonlinear systems; model identification
τsc) + D( z - 1 ) ( r( k - τsc + i) - y( k - τsc + i | k - τsc) )
( 12)
式中,i = 1,2,3,…,N - 1。
通过计算可以得到 N 步预测控制序列:
U = { u( k - τsc | k - τsc) ,u( k - τsc + 1 | k - τsc) ,…,
( 1. School of Information Science and Engineering,Central South University,Changsha 410083,China; 2. Institute of Automation,Chinese Academy of Sciences,Beijing 100190,China)
1引言
由于在远程及分布式环境下的巨大应用潜力, 网络化控制系统( Networked Control Systems,NCSs) 已经成为国际控制界的一个热点研究领域。在传统 控制系统中引入通信网络带来了许多便利,同时也 带来了一些缺陷,主要包括网络诱导时延、数据包 丢失、数据包错序等。这些新的特性使 NCSs 与传 统控制系统有了很大的差别,在大多数情况下,会 降低控制效果,甚至造成系统不稳定。为了分析和 解决这些问题,控制、通信、计算机等各个领域的 研究者提出了一些新的方法,如随机最优控制、模 糊逻辑控制、基于事件的控制、增益调度、数据包 丢失分析和混合控制等[1-9]。另外,Liu 等提出并发 展了网络化预测控制( Networked Predictive Control, NPC) 的思想,作者考虑了数据包丢失的情况,所 获得的预测控制器实现了对随机网络诱导时延的补 偿[10-12]。
式; u( k) 为控制器输出; y( k) 为控制对象输出。
令控制器的离散传递函数,如下所示:
u( k)
=
D( C(
z z
-1) -1)
(
r(
k)
- y( k) )
( 5)
式 中,C ( z - 1 ) = 1 + c1 z - 1 + c2 z - 2 + … + ccn z - cn , D( z -1 ) = d0 + d1 z -1 + d2 z -2 + … + ddn z - dn 为系数多 项式; r( k) 为参考输入; y( k) 为对象输出反馈; u( k) τsc) = ( 1 - A( z - 1 ) ) y( k - τsc + i | k -
τsc) + B( z - 1 ) u( k - τsc + i - 1 | k - τsc)
( 11)
u( k - τsc + i | k - τsc) = ( 1 - C( z - 1 ) ) u( k - τsc + i | k -
Step 1 接收预测控制序列。
Step 2 Step 3
计算 RTT 时延:
τ
=
τsc
+
τca
=
(
t
- ts) Ts
。
选择控制量 控制量应选择接收到的
预测控制序列中的第 τ 个控制量。例如执行器端接
收到的 N 步预测控制序列为
0→u( k - τsc | k - τsc)
·690·
控制工程
第 18 卷
( 3) 式中,0 < α < 1,为遗忘因子; θ^ N 为参数向量估计 值; φTN + 1 为 观 测 输 出 值 与 观 测 输 入 值 组 成 的 矩 阵[13]。
传感器端获得 yN + 1 和 φTN + 1 后,发送至控制器 端的辨识模块选择出参数 θ^ N = [a1 ,a2 ,b0 ,b1 ,b2]T 送入控制器中用来计算预测控制序列[13]。
本文的整个系统由中国科学院研发的 NetCon 网络化控制器,深圳德普施公司生产的球杆系统, 和 PC 构成。球杆系统包括伺服驱动器,伺服电机 和球杆 机 械 部 分。软 件 环 境 为 Matlab / Simulink 和 NetConTop 网络化控制组态软件。
网络化预测控制的控制效果与被控对象模型的 准确性有极为重要的关系。而球杆系统的准确建模 是一个比较困难的问题。本文通过实验,发现球在 球杆某一点 1. 5 cm 的邻域内运动时,若用一个二
摘
要: 网络诱导时延和数据包丢失、错序等问题会严重影响网络化控制系统的性能甚
至使系统不稳定。对于球杆系统这样具有开环不稳定和典型的非线性特征的系统来说尤其明
显。为了解决这一问题,采用网络化预测控制算法( Networked Predictive Control,NPC) 来设计球
杆网络化控制系统。介绍了网络化预测控制算法的设计,球杆对象的辨识建模,并通过仿真与
2011 年9 月 第18卷第5期
控制工程 Control Engineering of China
Sep . 2 0 1 1 Vol. 18,No. 5
文章编号: 1671-7848( 2011) 05-0688-04
球杆系统的网络化控制设计与实现
罗浩铭1 ,刘国平2 ,桂卫华1
( 1. 中南大学 信息科学与工程学院,湖南 长沙 410083; 2. 中国科学院 自动化研究所,北京 100190)
为控制器输出。
令 u( k + i | k) 表示基于 k 时刻之前的输入输出
做出的对 ( k + i) 时刻的预测控制量。令 τca,τsc 分别代表控制器端到执行器端的时延,和传感器端
到控制器端的时延。可知在 k 时刻,控制器端收到
从传感器端传过来的对象输入输出数据应为
U( k - τsc) = { u( k - τsc) ,u( k - τsc - 1) ,…
D( z - 1 ) ( r( k - τsc) - y( k - τsc | k - τsc) )
( 8)
根据对象模型,可知:
y( k - τsc + 1 | k - τsc) = ( 1 - A( z - 1 ) ) y( k - τsc +
1 | k - τsc) + B( z - 1 ) u( k - τsc | k - τsc)
第5 期
罗浩铭等: 球杆系统的网络化控制设计与实现
·689·
阶离散传递函数来表示此点的球杆模型,可以很好
地吻合小球在此该点附近的实际运行轨迹。所以在
球杆的输出为 4,6,8 V 处辨识出模型,然后在球
杆运行到相应位置时,进行模型切换,可以保证球
杆模型的准确性。具体的辨识算法为如下的带遗忘
因子的递推最小二乘法:
3 网络化预测控制系统设计
系统可分为控制器端和执行器端。控制器端主 要是网络化预测控制序列生成器; 执行器端主要是 网络补偿器和数据缓存器。传感器端将采集到的过 去的对象输入信号和对象输出信号送到数据缓存器 中,由网络发 送 至 控 制 器 端, 控 制 器 接 收 到 数 据 后,计算出未来 N 步预测控制量,打包发送到执行 器端,由网络补偿器根据时延与丢包情况从中选择 出某一步预测控制量,输入到控制对象中,由于此 控制量生成时已考虑到时延等作用,所以可以有效 地补偿网络的影响。一个完整的网络化预测控制框 图,如图 1 所示。