一种高精度实时电机转速测量新方法
基于C51单片机直流电机测速仪设计

基于C51单片机直流电机测速仪设计摘要:电机的转速是各类电机运行过程中的一个重要监测量,测速装置在电机调速系统中占有非常重要的地位,特别是数字式测速仪在工业电机测速方面有独到的优势。
本文介绍了一种基于C51单片机的光电传感器转速测量系统的设计。
系统采用对射式光电传感器产生与齿轮相对应的脉冲信号,使用AT89C51单片机采样脉冲信号并计算每分钟内脉冲信号的数目,即电机对应的转速值,最终系统通过LCD实时显示电机的转速值。
经过软硬件系统的搭建,分别通过Protues软件系统仿真实验和实际电路搭建检查实验。
仿真实验表明本系统满足设计要求,并且结构简单、实用。
整个直流电机测速系统在降低测速仪成本,提高测速稳定性及可靠性等方面有一定的应用价值。
关键词:转速测量;光电传感器;单片机Based On C51 SCM Single DC Motor Speedometer DesignABSTRACT:Motor speed is all kinds of motor operation is an important process to monitor the amount of speed measuring device in the motor control system occupies a very important position, Especially the digital speedometer in the industrial motor speed has unique advantage. This paper describes a photoelectric sensor 51 SCM-based speed measurement system design. System uses a beam photoelectric sensor generates a pulse signal corresponding to the gear, the use of a sampling pulse signal AT89C51 SCM and calculating the pulse per minute, the number of signals that the speed of the motor corresponding to the value of the final system time through the LCD display the motor speed value.After a hardware and software system structures, respectively, through Protues software system to build the actual circuit simulation and experimental examination. Simulation results show that the system meets the design requirements, and the structure is simple and practical. DC Motor Speed entire system in reducing speedometer costs, improve reliability, speed stability and a certain application value.Keywords: Speed measurement; Photoelectric; Single chip micyoco目录1 绪论 (1)1.1 数字式转速测量系统的发展背景 (1)1.2 转速测量在国民经济中的应用 (1)1.3主要研究内容 (2)1.4 设计的目的和意义 (2)2 转速测量系统的原理 (4)2.1 转速测量原理 (4)2.2 转速测量计算方法 (5)3转速测量系统设计方案 (7)3.1 直流电机转速测量方法 (7)3.2 设计任务及方案 (8)4 直流电机测速系统设计 (9)4.1 单片机AT89C51介绍 (9)4.2 转速信号采集 (14)4.2 转速信号处理电路设计 (16)4.4 最小系统的设计 (17)4.4.1复位电路 (17)4.4.2 晶振电路 (20)4.5 显示部分设计 (20)5 直流测速系统仿真 (24)5.1 直流测速系统仿真 (24)5.1.1单片机最小系统仿真 (25)5.1.2 数码管显示仿真 (25)5.2 主程序流程设计 (26)5.2.1 主程序流程设计 (26)5.2.2 定时器的初始化 (27)5.3 实际电路实验 (28)参考文献 (30)致谢 (31)1 绪论1.1 数字式转速测量系统的发展背景在现代工业自动化高度发展的时期,几乎所有的工业设备都离不开旋转设备,形形色色的电机在不同领域发挥着很重要的作用。
采用磁编码器实现电机转速与位置检测方法

采用磁编码器实现电机转速与位置检测方法《御&控{舔国羲采用磁编码器实现电机转速与位置检测方法引言全数字化是伺服驱动技术发展的必然趋势,而编码器到伺服驱动单元的数字化连接接口是全数字化伺服驱动技术的重要标志之一.伺服永磁同步电动机(PMSM)近几年来在伺服驱动系统中得到了广泛的应用.伺服永磁同步电动机需要精确的转子磁极位置实现磁场定向和准确的速度反馈进行控制.目前检测转子位置的方法有两类:无传感器技术和传统的机械传感器控制.无传感器技术是近几年研究的热点,主要是利用电机绕组中相关的变量如定子电压,定子电流等,来估算转子的位置和速度_】l,此法虽然省掉了机械传感器,但是该法存在计算量大,不能满宽范围调速要求,对电机的结构有要求等问题,影响了它的应用范围.而传统的方法多采用光电编码器,该方法精度很高l2】,但由于采用的发光元件,其寿命不长,成本高.本文采用一种新型磁编码器对永磁同步电动机转子速度和位置进行检测,实深圳航天技术创新研究院漆亚梅李铁才摘要:针对采用磁编码器作为电机位置检测问题,介绍了磁编码器工作原理和输出模式,及电机转子速度和转子位置测量的几种方法,并在基于DSP~tJPMSM控制系统中进行了实验研究.其研究结果表明:该磁编码器能高精度的,同时完成速度和位置全数字反馈控制,且性价比较高.关键词:磁编码器PMSM转速检测转于位置检测现了高精度的,同时完成速度和位置全数字反馈控制,且性价比较高.磁编码器工作原理编码器的设计采用了无接触磁编码器芯片AS5040.该芯片是一款世界上最小的l0位多输出旋转磁性编码器集成电路将现场传感霍尔元件,A/D转换,数字信号处理和输出接口集成到单个芯片.因此省去许多磁编码器的外围设备,使其体积给小,成本更低,并且由于采用了无接触传感,因而可以完美的应用于油,灰尘,温度变化大等工况【3】.编码器实物图片如图1所示.编码器工作原理:在芯一片上固定一图1磁编码器实物图片个可产生正弦磁场的两极磁钢,使其围绕芯片中心旋转即可测量角度,可通过磁体的360度旋转探测l024个绝对位置,测量分辨率可达l0位,可测最高转速l0000转/分,可以同时提供增量输出和绝对数出.并且提供了正交编码A/B输出,单通道输出和针对一对或两队极直流无刷电动机U一,厂一w三种不同的增量输出模式,可根据需要通过OTP进行配置;同时还提供了绝对位置数据同步串行接口(SSI),与角度成正比的工作周期PwM输出,提供可编程的起始位置和标记过零信号.该器件能够允许磁场为校准和偏磁,并具有故障自诊断功能,因此其测量精度和可靠性都很高,测速范围宽,能在恶劣环境下工作,与相同分辨率的光电编码器相比,成本只是光电编码器的几分之一3.测速原理与方法转速测量选用磁编码器模式1的增量输出,即将其配置成正交编码A/B模式,该模式下随着电机旋转产生与转速成正比相位差90的正交编码脉冲输出A/B及index信号理想波形,如图2所示,电机每旋转一周indeX输出~ServoControl49智能检测个脉;中,而A/B输出256个脉冲.转子的正反转可以根据A,B两路脉冲信号的相位先后来判断,转速可由如图2方法计算得出.r_1厂]f_]广]-『_]厂]厂]几厂_1厂]r-1:厂]厂]厂一n!:f_]广]图2正交编码A/B及index输出对符号假定时钟频率为f,磁编码器每转脉冲数为N,倍频系数k,n为转速,最大误差率,T为时间间隔,M1在T内对编码器脉;中计数值,M2对时钟脉冲计数值(见图37.(a)M法测速原理(b)T法测速原理(c)M/T法测速原理图3各种测速法原理"M法'铡速通过测量一段固定时间间隔的编码脉冲数来计算转速,适用于高速场合如图3(a)转速为:60M.n—(1)七xN×T相对误差率:==嘉x100%%(2)"T法'0速通过测量编码器相邻脉冲时间间隔来计算转速,适用于低速场合,当速度较高时其准确性较差.由图3b)可得到:60f—k~N—~M(3)2相对误差率:‰=等=×l00%(4)ax×0o%(4)"M/T法'测速"M/T法"测速是上面两种方法的结合,同时测量一定个数编码器脉;中和产生这些脉;中所花的时间,在整个速度范围内都有较好的准确性,但对于低速,该方法需要较长的检测时间才能保证结果的准确性,无法满足转速检测系统的快速动态相应指标.针对于此有提出了变"M/T法"测速法,即M1是可变化的,随着转速的降低M1 将降低,以提高其实时性要求【.如图3(C)为M/T法测速原理,可得转速:6O.k×(5)xNM,J,相对误差率:~max=-An=×l00%(6)×0u%(6)磁编码器转子位置检测同步串行接R(ss1)输出绝对位置当CSn由逻辑高电平变为逻辑低电平时,数据输出(DO)将由高阻态变为逻辑高电平并开始读出数据.数据在时钟信号第一个下降沿来临时写入转换寄存器,每个后续时钟信号上升沿来临时输出一位数据.连续字节包^竺^竺^!:^!^!^l竺^!:角位置数据状态位图4同步串口输出时序图50SewoControlr———一括16位,头1O位是角度信息D【9:0],后续的6位为系统信息,用于校验数据.其中,D9一DO为绝对角位置数据(最高有效位在第一个时钟信号之后).如图4所示.脉宽调制信号输出绝对位置可以输出一个频率为0.9756KHz的脉宽调制信号,其脉冲宽度与测量角度成比例:d-一1(7)t(+oE)…脉宽调制信号信号周期为l025微秒,最小脉宽为】微秒,对应位置为0,对应角度为O度;最大脉宽为1024微秒,对应位置l023,对应角度359.65度,精度可达0.35度.如图5所示,PWM的最小输出脉宽为1US..-_■●峨一..哪.....一...:;i………;'.…;.…:'■:?…;??,??…:?……!一?:? .…j…i,.一一..;...■.:....:....:...:....:....:....:...:….:..一,'—-_一—,——t—''….…''…'………'…..'''!…''一一.'一''.' ;….;…….;…0…;…0……0…..::::::::::''…d''…'图5脉宽调制信号的最小输出脉宽波形实验研究把磁编码器应用于基于TMS320LF2407A永磁同步电动机FOC控制系统的转子速度和位置中,图6基于TMS320LF2407A的永磁同步电动机FOC控制系统中转速和转子位置测量单元结构图(见图6).该在本系统中主要应用了TMS320LE2407A的EVA模块的捕获单元和正交编码电路,以及模数转换单元ADC.图6PMSM控制系统的转速和转子位置测量单元硬件结构图本方案采用M法.磁编码器的将每转产生的256个脉;中A/B正交信号被送入DSP的QEP1~DQEP2,由DSP的QEP正交编码电路自动利用脉冲的4个沿对输入的信号4倍频转换,可以使每转得到1024个脉冲.输入的4倍频脉;中存deX的输出实验测试波形,电机转子每旋转一周,A,B各输出256个脉冲,两相脉冲相差90.,indeX输出一个Jlg;~.模拟输出由PWM输出外接低通滤.j田了_帅,皿唧-■■-豫入到EVA中的TIME2的计数器T2CNT中,根据转向进行增减计数,转向可通过查询GPTCON寄存器I4位获得.i15一dex信号被送入捕捉CAP3,每当indeX发生跳变时,计数器对计数器T2CNT清零,以消除累积误差.根据M法测速算法进行软件编程即可实现速度检测.对于位置的检测,对磁编码器的脉宽调制信号进行变换,通过一个低通滤波器变成0~4.5V与转子位置角成正比的模拟信号直接给DSP的模拟输入ADCINO1,对其位置角进行检测.软件流程图如图7所示.图8,9为磁编码器增量A/B,in一一c—jnto……一……一一~一TM$320LF24047芯片初始化…一一一一…~…程序参数初始亿}………ADC初始化程序~,一Z…一…EvA初始化程序…一!一……中断允许(int2)l~一一一一…主程序循环初始化速度检测子程序.一一!…一一一一,~启动AID转换程序一I■.IlNT2 …~一…一一,结束图7主程序流程图!譬:■:-:::蔓'}??--?:::一'B'…j…:..…'…''…d'叠矗图8正交A和index输出波形图一1哼己_kH圈姗16己kHzt,■●■-■■■■t口l-:_}一.蚺.e§垒!曼盎I墅曼蹩g!f!堡图9正交信号A/B输出波形一町0.胚勘.,a??-,?-?…?……?………………:…? .;t:i一|l__0一≯l.t.Ii0÷善…■;l1_'il;.≥t.…图10模拟输出(《1司服控翩》波器来实现,其实测波形如图10所示, 0—4.5V电压与旋转角度成正比,因此可以通过任意时刻的电压值未读取角度值.结语本文介绍的磁编码器实现了高精度的,同时完成速度和位置全数字反馈控制,且性能与价格比较高.在目前应用最广泛的DSP硬件平台上可直接将磁编码器的测量信号,通过软件编程完成对电机转速和位置的检测与控制,使系统的集成性获得提高.是全数字伺服控制系统的优选器件.作者简介漆亚梅(1962一)男硕士,研究方向为电机与驱动控制.参考文献【1】于庆广.刘葵,王冲,袁炜嘉,钱炜慷,张程等.光电编码器选型及同步电机转速和转子位置测量【J】.电气传动.2006,36(4): 17—19[2】吕德刚李铁才,杨贵杰等.高性能磁编码器设计….仪器仪表,2Oo6,27(6):1347~l350【3]江庆明,杨旭,甘永梅.王晓钰.王兆安等一种基于光电编码器的高精度测速和测加速度方法Ⅲ.微计算机信息,20042o(6):48~49--…__…__…●-…-_…_.…..…..…..…..…_'…_●…(上接第46页)取速度.所以在此处还需要完善.2.组态王作为堆垛机监控系统的上位监控软件,具有实现在线实时监控堆垛机的工作状态,立体仓库的存储状况,绑定底层数据库实现设置堆垛机连续作业,联网实现网络控制与管理等功能,上位机对下位设备状态的动画模拟显示还应进一步完善,从而更形象直观地对现场设备进行状态监控.堆垛机快速存取系统,提高了工作效率,达到了设计要求,随着物流业在我国的迅速兴起,对堆垛机控制系统将提出更高的要求.由于组态软件的控制系统可对系统进行分布式控制与集中管理,它将得到更广泛的应用.作者简介朱帅男研究生,研究方向为智能电气与安全参考文献n】刘毅.自动化立体仓库管理与监控系统研究[D].太原:太原理工大学,2008,I7.[2]彭魏臻.麻红昭PII协议分析[J】化工自动化及仪表,20O6,33(4).【3]秦明森实用物流技术[M].北京:中国物资出版社.2001,38【4】彭魏臻麻红昭PPI协议分析[J]化工自动化及仪表,2006,33(4):8—12,[5】龙永辉,孙中生SiomensPPI协议分析….工业控制计算机._-K~05,18(7):】10}12. ServoControI51。
共振转速计原理-概述说明以及解释

共振转速计原理-概述说明以及解释1.引言1.1 概述共振转速计是一种基于共振原理的转速测量仪器,通过测量共振频率来准确、快速地获取被测物体的转速信息。
共振转速计在工业领域中具有广泛的应用,尤其在机械设备的维护和监测方面起着重要作用。
本文将从共振转速计的定义和原理、应用领域、以及优势和局限性等方面进行详细介绍,旨在帮助读者更深入地了解共振转速计的工作原理和应用价值。
同时,文章也将对共振转速计的未来发展进行展望,探讨其在工业领域中的潜在价值和应用前景。
1.2 文章结构本文将首先介绍共振转速计的概念和原理,从理论上深入探讨其工作原理及基本构成要素。
接着,将探讨共振转速计在实际应用领域中的具体应用情况,包括但不限于工业生产、科学研究和医疗设备等方面的应用。
同时,会对共振转速计相较于传统转速计的优势和局限性进行分析和比较,探讨其在实际应用中可能遇到的问题和挑战。
最后,文章将对共振转速计的发展前景进行展望,探讨其在未来可能的应用领域和技术创新方向。
通过全面分析和思考,旨在为读者提供对共振转速计技术的深入了解,并促进该领域的进一步研究和发展。
1.3 目的目的部分的内容:本文旨在深入探讨共振转速计的原理、应用领域以及优势和局限性,以帮助读者更全面地了解这一重要的测量工具。
通过对共振转速计的定义和原理进行详细解析,可以帮助读者理解其工作机制和技术特点。
同时,介绍共振转速计在各个领域的实际应用,展示其在工程领域中的重要作用。
了解共振转速计的优势和局限性,有助于读者在使用该设备时做出更加明智的决策,并了解其在特定情况下可能存在的限制。
通过本文的阐述,希望读者能够对共振转速计有一个全面的了解,为工程实践和相关研究提供一定的参考和帮助。
同时,也可以促进对共振转速计的进一步研究和发展,为其在不同领域的应用提供更多可能性和创新思路。
2.正文2.1 共振转速计的定义和原理共振转速计是一种利用共振现象来测量转速的仪器。
其原理基于共振现象,即当外加的激励频率与系统的固有频率匹配时,系统会发生共振,这时系统的响应幅度会显著增大。
一种BLDC电机转速控制方法与流程

一种BLDC电机转速控制方法与流程摘要本文介绍了一种基于Hall传感器的BLDC电机转速控制方法与相关流程。
该方法使用了定时器和基于递推神经网络的PID控制器,能够快速、准确地控制电机的转速,并且具有较高的控制精度和动态性能。
同时,本文还介绍了该方法的硬件实现和软件设计流程,方便电机控制系统的开发者进行参考和应用。
介绍BLDC电机作为一种新型的无刷电机,在各种电子设备和机械装置的控制系统中得到了广泛的应用,尤其是在高动态控制和高效率驱动方面表现突出。
在电机转速控制方面,基于Hall传感器的控制方法是一种行之有效的方法,可以实现快速、准确的转速控制和电机启停等功能。
本文介绍了一种基于Hall传感器的BLDC电机转速控制方法与相关流程。
该方法采用了定时器和基于递推神经网络的PID控制器进行控制,具有较高的控制精度和动态性能。
具体实现过程中,首先需要根据电机的型号和规格,选择合适的Hall传感器和控制器芯片,然后进行硬件设计和元器件布局,最后进行软件编程和调试,即可实现BLDC电机的转速控制功能。
硬件设计流程BLDC电机转速控制的硬件设计是整个控制系统的重要组成部分,主要包括元器件选型、电路设计、板级布局和连接等方面。
以下是具体的硬件设计流程。
1.元器件选型根据电机的型号和规格,选择合适的Hall传感器和控制器芯片。
一般来说,Hall传感器的数量应与电机的极数相等,且应选用高精度、高灵敏度的传感器。
控制器芯片可以选择比较常见的STM32、ATmega等芯片,也可以根据具体应用场景选用专门的BLDC电机驱动芯片。
2.电路设计根据所选用的元器件和电机的规格,设计合适的电路,包括功率驱动电路、信号调理电路、传感器反馈电路和通信接口等。
其中,功率驱动电路是整个控制系统的核心,需要选择高效、高稳定性的驱动器,并进行适当的电路保护措施。
3.板级布局针对电路设计,进行合理的板级布局和封装,满足电路元器件的安装和布线要求,减少电磁干扰和故障风险。
霍尔测速结论

霍尔测速结论霍尔测速是一种常用的测速技术,在物理学和工程领域得到广泛应用。
它基于霍尔效应,通过测量电流和磁场的关系来计算速度,具有高精度和快速响应的特点。
本文将介绍霍尔测速的原理、应用和优势。
一、原理霍尔效应是描述在导电材料中,当电流通过时,垂直于电流方向施加磁场时,会产生电势差的现象。
这种现象是由于电子在磁场中受到洛伦兹力的作用,导致电子在材料中的运动轨迹发生偏转,进而产生电势差。
霍尔效应是基于这个原理设计的。
在霍尔测速中,通常使用霍尔元件来测量电势差。
霍尔元件是一种半导体材料,具有特殊的结构和材料参数,能够产生较大的霍尔电压。
当电流通过霍尔元件时,由于磁场的作用,电势差会在元件的两侧产生,这个电势差就是霍尔电压。
通过测量霍尔电压和已知的磁场强度,可以计算出速度。
二、应用霍尔测速广泛应用于各个领域,特别是在自动化控制和运动控制中。
以下是几个常见的应用场景:1. 汽车行驶速度测量:在汽车中,通过安装霍尔元件和磁场传感器,可以测量车辆的行驶速度。
这对于车辆控制和安全管理非常重要。
2. 电机转速测量:在电机控制系统中,通过安装霍尔元件和磁极传感器,可以实时监测电机的转速,从而及时调整电机的控制参数。
3. 流体流速测量:在流体控制系统中,通过在管道中安装霍尔元件和磁场传感器,可以测量流体的流速,从而控制流量和压力。
4. 机器人运动控制:在机器人控制系统中,通过安装霍尔元件和磁场传感器,可以实时监测机器人的运动速度,从而实现精确的运动控制。
三、优势与其他测速方法相比,霍尔测速具有以下优势:1. 高精度:霍尔测速可以实现较高的测量精度,通常可以达到0.1%以内的误差。
2. 快速响应:由于霍尔元件的特殊结构和材料参数,霍尔测速具有快速响应的特点,可以实时监测速度变化。
3. 非接触式测量:霍尔测速是一种非接触式测量方法,不需要物理接触目标物体,从而减少了对目标物体的影响。
4. 适应性强:霍尔测速适用于各种环境条件下的测量,无论是高温、低温还是高湿、低湿环境,都可以正常工作。
一种基于M/T测速法的数字测速电路
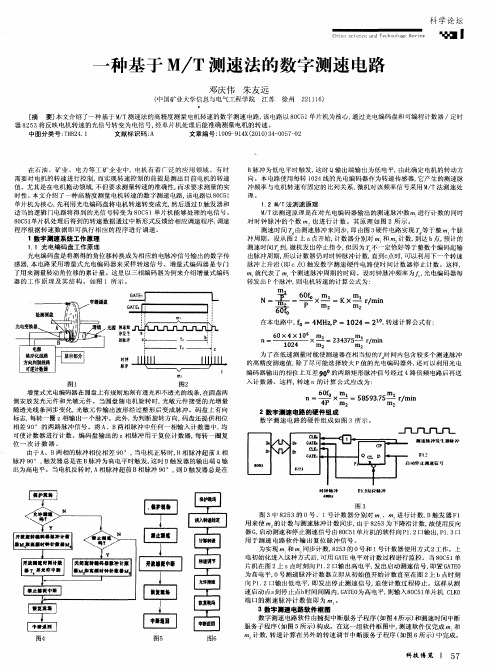
图1
图2
增量式 光电编码 器在 圆盘上有 规则地 刻有透 光和 不透光 的线条, 在圆盘 两 侧 安放 发光 元件 和光 敏元 件 。 当圆盘 随 电机 旋 转 时, 光敏 元件 接受 的 光增 量 随透 光线 条 同步变 化 , 敏元 件输 出波 形 经过整 形 后 变成脉 冲 。码 盘上 有 向 光 标 志, 转一 圈 z 输 出一 个脉冲 。此外 , 每 相 为判 断 旋转 方 向, 盘还 提供 相位 码 相差 9 。 的两路 脉 冲信 号 。将 A、B两 相 脉冲 中任 何 一相 输入 计 数器 中, 0 均 可使 计数 器进 行计 数 。编码 盘 输 出的 Z相脉 冲用 于 复位 计数 器 , 转一 圈复 每 位一次计数器 。 由于 A 、B两 相的脉 冲 相位 相差 9 。, 电机 正 转 时, 相 脉冲 超 前 A相 O 当 B 脉冲 9 。, 0 触发 器总 是在 B 冲 为高 电平 时 触发 , 脉 这时 D 发器 的输 出端 Q 触 输 出为 高 电平 。 当电机 反转 时, A相脉冲 超前 B相脉 冲 9 。, D触发 器总 是在 0 则
N
!! : :广—————]
■’=■■■■- ■[■■■■■_; ■●==二==] -■ -■■-= ■ ■■■■_ = _ ■
辫 几 速 『l B —
器随 冲
素 m× n 6_ O2 f oK
— 一
i
a —————— 一 T ————— ;
在 石 油 、矿 业 、 电力 等工 矿 企 业 中,电机 有 着 ,泛 的应 用 领域 。有 时 需要对 电机的 转速 进行 控 制, 而实现 转 速控 制 的前 提是 测 出 目前 电机 的转速 值。尤其 是在 电机 拖动领 域, 但要 求测 量转 速 的准确 性, 不 而求 要 求测量 的 实 时性 。 本文 介 绍了一 种 高精度 测量 电机 转速 的数 字测速 电路, 电路 以 8C 1 该 0 5 单片机 为核 心, 先利 用光 电编码 盘 将 电机 转 速转 变成 光, 然后 通过 D触发 器和 适当 的逻 辑 门电路将 得 到 的光信 号转 变 为 8 C 1 片机 能够 处 理的 电信 号 。 05 单 8C1 0 5 单片机 处理后 得 到 的转 速数 据通 过 中断形 式反 馈给相 应 调速程 序, 调速 程 序 根据 转速 数 据 即 可执 行 相应 的程序 进 行 调速 。
霍尔传感器的电机转速测量系统国外研究现状
霍尔传感器的电机转速测量系统国外研究现状一、引言霍尔传感器是一种常用于测量电机转速的传感器。
它通过检测磁场的变化来确定电机转子的位置和速度。
在国外,已经有许多研究对霍尔传感器的电机转速测量系统进行了深入探索和开发。
本文将对国外研究现状进行综述。
二、霍尔传感器原理霍尔传感器是基于霍尔效应工作的,通过在一个导体中施加电场,当磁场垂直于电流方向时,会产生一个横向的电势差。
这个效应可以用来检测磁场的变化。
在电机转速测量系统中,霍尔传感器通常安装在电机转子上,通过检测旋转过程中磁场变化来确定转子位置和速度。
三、国外研究现状1. 传统型霍尔传感器一些早期的研究主要集中在传统型霍尔传感器上。
这种类型的传感器通常使用单个或多个霍尔元件来检测磁场变化,并通过信号处理电路将其转换为数字或模拟信号。
这些方法可以实现较高精度和稳定性的转速测量,但对于高速转动的电机可能存在一定的限制。
2. 高速霍尔传感器为了解决传统型霍尔传感器在高速转动电机上的局限性,一些研究开始关注高速霍尔传感器的开发。
这种类型的传感器通常采用更先进的技术和材料,以提高其响应速度和测量精度。
一些研究使用了纳米材料来制造高灵敏度和高响应速度的霍尔元件。
这些方法在高速转动电机上取得了较好的效果。
3. 多通道霍尔传感器为了提高转速测量系统的精确度和稳定性,一些研究开始将多个霍尔元件组成多通道霍尔传感器。
这种类型的传感器可以同时检测多个位置,并通过信号处理算法来确定转子位置和速度。
这种方法可以减少误差并提高系统稳定性。
4. 基于微控制器的霍尔传感器系统随着微控制器技术的发展,一些研究开始将霍尔传感器与微控制器相结合,构建基于微控制器的电机转速测量系统。
这种系统可以实现实时数据处理和显示,同时具有较高的精确度和稳定性。
一些研究还将无线通信技术应用于该系统,实现了远程监测和控制。
五、总结通过对国外研究现状的综述,我们可以看到在霍尔传感器的电机转速测量系统领域已经取得了许多进展。
霍尔传感器测电机转速课程设计
霍尔传感器测电机转速课程设计一、引言在现代自动化控制系统中,电机是最常用的执行元件之一。
而对电机转速的准确测量对于电机控制和系统性能的优化具有重要意义。
本文将围绕着霍尔传感器测电机转速这一主题展开讨论,深入探究其课程设计的相关内容。
二、霍尔传感器测电机转速原理电机的转速测量是自动化控制中的基础问题,而霍尔传感器作为一种常用的位置传感器,在电机转速测量中发挥着重要作用。
霍尔传感器可以通过检测磁场的变化来测量电机转子的位置,进而计算出电机的转速。
在电机转速测量中,霍尔传感器通过测量每个磁极之间的时间间隔来确定电机转子的角度,从而得到转子的角速度。
基于霍尔传感器的电机转速测量方法可以实现高精度和实时性,并且具有较好的抗干扰能力。
在工程应用中被广泛采用。
三、课程设计内容与要求1. 理论分析在课程设计中,首先需要对霍尔传感器测电机转速的原理进行深入的理论分析,包括霍尔传感器的工作原理、电机转速测量方法及其精度、灵敏度等方面的内容。
学生需要了解霍尔传感器和电机之间的工作原理和相互作用,从而为后续的实验设计和数据分析提供理论支持。
2. 实验设计课程设计还需要包括针对霍尔传感器测电机转速的实验设计。
这包括实验装置的搭建、实验步骤的制定以及数据采集和处理的方法。
学生需要通过实际操作,深入理解霍尔传感器测电机转速的原理,并掌握实际实验技能。
3. 数据分析与报告课程设计还需要对实验数据进行分析与综合,撰写实验报告。
学生需要对实验中获得的数据进行分析,验证霍尔传感器测电机转速的准确性和可靠性,并结合理论知识进行综合分析。
实验报告应包括数据处理的具体方法和结果,以及对实验过程和结论的总结性描述。
四、个人观点与理解在我看来,霍尔传感器测电机转速课程设计对于提升学生的实际动手能力和理论知识应用能力具有重要意义。
通过这样的课程设计,学生可以加深对于霍尔传感器原理和电机转速测量方法的理解,并且培养实验数据处理和报告撰写的能力。
这样的课程设计既有助于学生将所学的理论知识应用到实际中,又可以提高他们的实际操作能力和科研创新能力。
转速测量方法范文
转速测量方法范文转速测量方法是用于测量旋转物体的转速的一种方法。
转速是指旋转物体单位时间内旋转的圈数或角度。
转速测量对于许多领域的工作都非常重要,例如机械工程、电机工程、航空航天等。
下面将介绍几种常用的转速测量方法。
1.数据采集器测量法:这是一种常用的转速测量方法,通过将转速传感器与数据采集器连接,将转速传感器输出的电信号转换为数字信号,并通过数据采集器将转速数据记录下来。
数据采集器可以采集高速转速甚至测量不易接触到的物体的转速,具有精度高、操作简单的优点。
2.光电测量法:光电测量法利用光电传感器对转速进行测量。
常用的光电传感器有反射式和透明式两种。
反射式光电传感器通过测量物体上反射的光信号来确定转速,透明式光电传感器则通过测量物体从光源中通过的光的变化来确定转速。
光电测量法具有测量范围广、响应速度快的优点,但在特殊环境下,如强光或低温环境下可能会受到干扰。
3.磁电测量法:磁电测量法是通过磁电传感器来测量转速。
常用的磁电传感器有霍尔元件和磁阻元件两种。
霍尔元件是一种基于霍尔效应的传感器,通过测量在磁场中沿着其通道空间产生的电势差来确定转速。
磁阻元件则是通过测量磁场对元件电阻的影响来确定转速。
磁电测量法具有抗干扰能力强、测量精度高的优点,适用于工作环境复杂的情况。
4.高频测量法:高频测量法是一种利用高频信号来进行转速测量的方法。
这种方法通过测量旋转物体产生的高频信号的周期或频率来确定转速。
常见的高频测量法有频率计、计数器等。
高频测量法具有响应速度快、测量范围广的优点,适用于高速转速的测量。
以上介绍了几种常用的转速测量方法。
在实际应用中,选用合适的转速测量方法要考虑转速范围、测量精度、工作环境等因素。
不同的测量方法有各自的特点和适用范围,可以根据实际需求选择合适的方法进行转速测量。
一种电机转速测量装置的设计
一种电机转速测量装置的设计摘要本文介绍了一种电机转速测量装置的设计方案。
该装置采用了特定的传感器和微处理器,能够精确测量电机的转速,并通过显示屏和接口提供实时数据输出。
该设计方案具有简单、可靠、高精度等特点,适用于电机转速测量及控制系统中的各种应用。
介绍电机转速是衡量电机性能的重要指标之一。
在许多工业应用中,需要对电机转速进行准确测量,以确保工作效率和设备的正常运行。
本文提出的电机转速测量装置能够满足这一需求,并具有一定的创新性和实用性。
设计原理本设计方案采用非接触式磁性传感器来测量电机转速,具体原理如下:1.将一个小型磁体固定在电机的转轴上,并将磁感应线圈固定在电机壳体上。
2.当电机转动时,磁感应线圈会受到转轴上磁体的磁场变化影响,从而产生感应电动势。
3.通过对感应电动势的采样和处理,可以得到电机转速的准确值。
设计方案硬件设计硬件设计包括磁感应线圈、信号调理电路以及显示和接口部分。
1.磁感应线圈:采用高灵敏度的磁感应线圈,以确保对电机的微小磁场变化进行准确感应。
2.信号调理电路:对磁感应线圈输出的微弱信号进行放大、滤波和调整,以获得稳定、可靠的转速信号。
3.显示和接口:采用高清液晶显示屏显示电机转速,并提供多种接口,如U SB、R S232等,以实现数据的实时输出和远程监控。
软件设计软件设计方面,主要涉及信号处理与转速计算、用户界面显示和数据输出等。
1.信号处理与转速计算:采用微处理器对从信号调理电路获得的转速信号进行采样、滤波和计算,得到准确的电机转速值。
2.用户界面显示:通过设计直观友好的用户界面,将电机转速实时显示在液晶屏上,方便用户实时观察和检测。
3.数据输出:提供多种数据输出接口,如U SB、R S232等,以满足用户对转速数据的实时输出和记录需求。
特点和优势1.精确度高:通过采用高灵敏度的磁感应线圈和精确的信号处理算法,能够实现对电机转速的准确测量,误差小于1%。
2.稳定可靠:采用小型磁体和固定式磁感应线圈,避免了传统触点式测速器件的接触磨损和故障问题,提高了稳定性和可靠性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
收稿日期:2001-07-16
作者简介:马金权,男,1967年生,讲师,主要从事自动化技术研究。
一种高精度实时电机转速测量新方法
马金权1李庆辉1强盛2
(1.齐齐哈尔大学,齐齐哈尔161006;2.哈尔滨工业大学,哈尔滨150001)
摘要本文首先分析三种电机转速测量方法的优缺点,然后提出改进方法,最后给出其硬件电路及软件流程,并通过实验验证该方法的优越性。
该测速方法被应用于某振动时效装置中,可实现高精度实时测量。
该方法可广泛应用于直流PWM 调速系统中。
关键词:实时;测速;数字锁相环
中图分类号:TM306;TM935.4文献标识码:A 文章编号:1007-984X (2002)01-0042-03
在伺服控制系统中,经常要对电机进行实时转速测量。
根据脉冲计数来实现转速测量的方法主要有M
法(测频法)、T 法(测周期法)和同步M/T 法[1]。
从测量分辨率上看,T 法测低速时分辨率较高,但随着转速的增大,分辨率变坏;M 法则相反,高速时分辨率较高,而低速时分辨率变低;同步M/T 法结合了前两者的优点,在整个转速范围内有较高的分辨率。
从测量精度上看,T 法测速的测量精度随着转速的增加而减小;M 法的测速精度在高速时较高,而在低速时变低;同步M/T 法的测速精度介于二者之间。
综合以上两方面,同步M/T 法是一种比较好的方法。
在许多系统中都采用这种方法。
但作者在振动时效装置开发中使用这种方法测量电机转速时,发现如下问题:
1)实时性差。
因为需要同步,所以实际定时时间滞后于设定时间,具有迟滞性。
2)测速精度具有非线性。
在宽转速范围内,测速误差逐渐递增,不均匀,这不利于在整个转速范围内实现高精度转速控制。
3)同步M/T 法和T 法一样,计数时钟都利用单片机内部定时器的时钟很难做到与转速脉冲同步,即使做到与转速脉冲同步,测量的计数误差也会给测量精度带来影响。
在同步M/T 法中,测量精度本质上并没有显著提高。
4)本系统要求转速测量精度为±1r/min ,测量时间为10ms ,测量范围为1000~8000r/min 。
系统中80C196单片机的振荡频率为f c =8M Hz ,内部定时器的时钟频率为f =500k Hz ,时钟分辨率为2μs 。
同步M/T 法测速原理图如图1。
图1同步M/T 法测速原理图
第18卷第1期
齐齐哈尔大学学报Vol.18,No.12002年3月Journal of Q i q ihar Universit y March
,2002
图1中,转速n =60f M
p m ,式中:M —记录的盘脉冲数;m —计数脉冲;p —每转盘脉冲数(p =10)。
图1中
的第一个同步的盘脉冲的计数值为m ’1=m 1+α(0≤
α≤1),M 个盘脉冲的计数值取正数值为m =int (M m ′1),平均到每一个盘脉冲的计数误差为α-int (M α)M
,当测速周期为10ms ,取M =10,测量6000r/min 转速时,由计数误差所引起的转速误差为0~12r/min 。
不能满足本系统对高精度的测速要求。
为提高测速精度,本文提出一种新方法,即改进的M 法。
该方法在高速时精度很高,只要能增加低速时的盘脉冲,就能解决在低速时测量精度低的问题。
为了对盘脉冲倍频,采用了基于4046数字锁相环的倍频计数电路。
本文给出其硬件电路,软件流程及实验结果。
该方法应用于某振动时效装置中,用来精确实时测量电机转速,取得了满意的效果。
1测速原理
改进的M 法测速硬件电路如图2。
图2中由4046和两片计数器4520构成锁相倍频电路。
功能是对经过T IL 117光电隔离的f n 测速脉冲信号进行倍频;由两片4040(12位计数器)构成16位计数器,作为倍频信号的计数器;两片4014(8位并/串转换)构成16位并/串转换器,在80C196的控制信号作用下,把16位计数器中并行计算值转换成串行数据,传送给80C196。
图2中,转速:n =60m βp T c
,式中:m 为脉冲计数值;β为倍频系数;p 为盘脉冲数;T c 为测数周期。
如果使βp T c =60,那么在测速周期T c 内读出的计数值m 即为转速值,其分辨率为±1r/min ,测速精度为1/n 。
倍频系数β的选取是在一定范围内的,与4046最高工作频率f max 和它的输入信号的最高频率f inmax 有关系为β<f max f inmax ,当f max =1.6M Hz ,f inmax =1667Hz (n =1000r/min )时,取β<1000,T c =10ms 时,β=600。
为了提高转速测量精度,可采用f max 更高的高速4046或缩短测速周期T c 。
图2改进的M 法测速硬件框图
2软件设计
改进的M 法测速程序流程如图3。
第1期一种高精度实时电机转速测量新方法・43
・
・44・齐齐哈尔大学学报2002年
图2中80C196单片机的HSO.5为转速测量的控制端,在转速测量子程序中,设置HSO.5两个事件:立即置HSO.5引脚为低电平事件(启动转速测量);在10ms定时时间到时,设置HSO.5引脚为高电平事件(停止转速测量),在从4014中读取16位计数值,是在停止转速测量期间,通过软件指令,置P2.7端口为高低电平,实现输出一个加载脉冲(把4040中的计数值加载到4014中)和连续输出16个移位脉冲,在每送出一个移位脉冲后,检测P0.0端口,存储当前的被移出的数据值。
在转速测量中断子程序中,直接读取16位计数值,因为4040采取的是连续计数方式,每次启动测速时并不复位4040,所以当前转速值等于最近相邻两次计数值的差值。
3实验结果
为验证改进的M法优于同步M/T法,作者做了如下对比实验。
通过单片机给定某一转速值,调用转速测量子程序进行实时测速,再将转速值转换为十进制数,最后使用7218B驱动L ED数码管显示相应转速。
经过多次实验得结果如图4。
图4同步M/T法与改进M法测速结果对比
通过实验可以看出,改进的M法测速具有较高的精度。
4结论
本文提出的高精度实时转速测量新方法———改进的M法,应用于某型号振动时效装置中,测速精度可达±1r/min。
改进的M法测速,虽然硬件稍复杂,但线性度好,程序算法十分简单,运行时间非常短,很适合实时控制。
该方法可广泛应用于直流PWM调速系统中。
参考文献
[1]封小钰,蒋贞荣.利用8098单片机实现高精度实时转速测量.电测与仪表,1997;34(5):23~26
[2]崔实,盛文利.A T89C2051单片机在高进度测速中应用.电子测量技术,1999;(2):28~30
A novel method of motor s p eed measurement with
hi g h-accurac y and real-time
Ma J in-q uan1L I Qin g-hui1Q IAN G Shen g2
(1.Qi q ihar U niversit y,Qi q ihar161006;2.Harbin Instit ute of Technolo gy,Harbin150001)
Abstract The advanta g e and disadvanta g e of t hree met hods of s p eed measurement is anal y zed.Then an advanced met hod includin g hardware and software is p resented.The advanta g e of t he met hod is verified b y t he test s.This met hod has been a pp lied into vibrator y st ress relief devices,which can realize hi g h-accurac y and real-time s p eed measurement.This met hod can be widel y a pp lied into DC PWM variable s p eed s y stem.
K e y words real-time;s p eed measurement;di g ital p hase-locked loo p。