概略幅相曲线例题
控制工程基础习题答案-清华大学出版社-沈艳-孙锐主编
控制工程基础习题答案第一章1-1 试比较开环控制系统和闭环控制系统的优缺点?(略)1-2 日常生活中有许多闭环和开环控制系统。
试举几个具体例子,并说明它们的工作原理,画出结构方框图。
(略)1-3 图1.14是液面自动控制系统的两种原理示意图。
在运行中,希望液面高度H 0维持不变。
1.试说明各系统的工作原理。
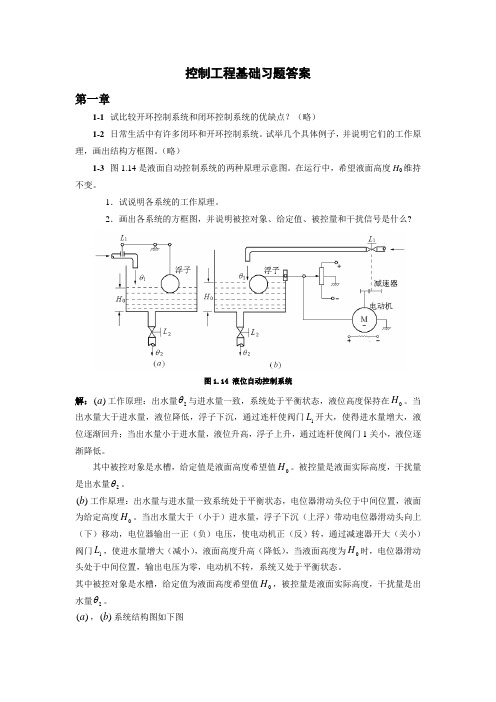
2.画出各系统的方框图,并说明被控对象、给定值、被控量和干扰信号是什么?图1.14 液位自动控制系统解:()a 工作原理:出水量2θ与进水量一致,系统处于平衡状态,液位高度保持在0H 。
当出水量大于进水量,液位降低,浮子下沉,通过连杆使阀门1L 开大,使得进水量增大,液位逐渐回升;当出水量小于进水量,液位升高,浮子上升,通过连杆使阀门1关小,液位逐渐降低。
其中被控对象是水槽,给定值是液面高度希望值0H 。
被控量是液面实际高度,干扰量是出水量2θ。
()b 工作原理:出水量与进水量一致系统处于平衡状态,电位器滑动头位于中间位置,液面为给定高度0H 。
当出水量大于(小于)进水量,浮子下沉(上浮)带动电位器滑动头向上(下)移动,电位器输出一正(负)电压,使电动机正(反)转,通过减速器开大(关小)阀门1L ,使进水量增大(减小),液面高度升高(降低),当液面高度为0H 时,电位器滑动头处于中间位置,输出电压为零,电动机不转,系统又处于平衡状态。
其中被控对象是水槽,给定值为液面高度希望值0H ,被控量是液面实际高度,干扰量是出水量2θ。
()a ,()b 系统结构图如下图1-4 若将图1.14(a )系统结构改为图1.15。
试说明其工作原理。
并与图1.14(a )比较有何不同?对系统工作有何影响?解:若将1-17()a 系统结构图改为1-18,系统变成了正反馈,当出水量与进水量一致,液面高度为给定值0H 。
当出水量大于进水量,液面位降低,浮子下称,通过连杆使阀门1关小,进水量越来越小,液面高度不能保持给定高度0H ,同样当出水量小于进水量,浮子上浮,液位升高,使阀门1开大,进水量增大,液位越来越高,不可能维持在给定高度0H1-5 图1.16是控制导弹发射架方位的电位器式随动系统原理图。
5.3.15.2.2开环幅相特性曲线学习资料
j
1)
2 (1
k
0.25 2 )(1 2 ) [(1
2.5 2 )
j(0.5 2 )]
Im[ GK ( j)] 0.5 2
0
,求得
2 x
0.5 ,因此求得幅相曲线与实轴得交点为:Re[GK ( jx )] 2.67k
概略幅相曲线见右图:
入坐标原点;
n m 2 时, G( j) 0 180 0 ,Nyquist图从负实轴的方向进
入坐标原点;
n m 3时, G( j) 0 270 0 ,Nyquist图从正虚轴的方向进
入坐标原点。
图2
3)穿越实轴的位置。
令频率特性 G( j) 的虚部为零,即 Im[G( j)] 0 ,并求得相应的频率 x ,然后将此频率 x 代入 频率特性G( j) 的实部,则 Re[G( jx )] 就是Nyquist图与实轴的交点。
图1
5.2.2 开环幅相特性曲线
三要素
2)终点确定。
Nyquist图的终点是 时 G( j) 在复平面上的位置。
G(
j)
b0 s m a0 s n
b1sm1 a1sn1
... ...
bm1s an1s
bm an
b0 a0
(
1 j)nm
b0 / a0 ( j)nm
(3)
n m 1时, G( j) 0 900 ,Nyquist图从负虚轴的方向进
1)起点确定。
Nyquist图的起点是 0 时 G( j0 ) 在复平面上
的位置。
G(
j0 )
(
K
j)
G0 (
j)
0
(
K
j)
(2)
自动控制原理+课后问题详解

自控原理课后习题精选2-5 试分别列写图2-3中各无源网络的微分方程(设电容C 上的电压为)(t u c ,电容1C 上的电压为)(1t u c ,以此类推)。
o(a)+-u c (t)(b)+-u c1(t)(c)+-u R1(t)图2-3 习题2-5 无源网络示意图解:(a )设电容C 上电压为)(t u c ,由基尔霍夫定律可写出回路方程为21)()()()()()(R t u R t u dt t du Ct u t u t u o c c o i c =+-=整理得输入输出关系的微分方程为121)()()()11()(R t u dt t du C t u R R dt t du Ci i o o +=++ (b )设电容1C 、2C 上电压为)(),(21t u t u c c ,由基尔霍夫定律可写出回路方程为dtt du RC t u t u dtt du C R t u t u R t u t u t u t u t u c c o c c o c i o i c )()()()()()()()()()()(11222221=-=-+--=整理得输入输出关系的微分方程为Rt u dt t du C dt t u d C RC R t u dt t du C C dt t u d C RC i i i o o o )()(2)()()()2()(12221212221++=+++ (c )设电阻2R 上电压为2()R u t ,两电容上电压为)(),(21t u t u c c ,由基尔霍夫定律可写出回路方程为)()()(21t u t u t u R i c -= (1) )()()(22t u t u t u R o c -= (2)2221)()()(R t u dt t du C dt t du CR c c =+ (3)dtt du C R t u t u c o i )()()(21=- (4)(2)代入(4)并整理得CR t u t u dt t du dt t du o i o R 12)()()()(--= (5) (1)、(2)代入(3)并整理得222)()(2)()(R t u dt t du C dt t du C dt t du CR R o i =-+ 两端取微分,并将(5)代入,整理得输入输出关系的微分方程为CR t u dt t du C R dt t u d C R C R t u dt t du C R dt t u d C R i i i o o o 1122211222)()(1)()()()11()(++=+++2-6 求图2-4中各无源网络的传递函数。
自动控制原理习题解答

第三章3-3 已知各系统的脉冲响应,试求系统的闭环传递函数()s Φ:()()1.253(1)()0.0125;(2)()510sin 445;(3)()0.11t t k t e k t t t k t e --==++=-解答: (1) []0.0125()() 1.25s L k t s Φ==+(2)[])222223222()()5sin 4cos 454441511616116s L k t L t t t s s s s s s s s ⎡⎤Φ==++⎢⎥⎣⎦⎫=++⎪++⎭⎛⎫+++ ⎪⎝⎭=⎛⎫+ ⎪⎝⎭(3)[]()111()()0.1110313s L k t s s s s ⎡⎤⎢⎥Φ==-=⎢⎥+⎢⎥+⎣⎦ 3-4 已知二阶系统的单位阶跃响应为)6.1sin(5.1210)(1.532.1︒-+-=t t h et试求系统的超调量σ%,峰值时间tp和调节时间ts.解答:因为0<ξ<1,所以系统是欠阻尼状态。
阻尼比ξ=cos(1.53︒)=0.6,自然频率26.0/2.1==w n,阻尼振荡频率w d=6.16.01212=-⨯=-=ξww nd1. 峰值时间tp的计算96.16.1===ππwt dp2. 调节时间ts的计算9.226.05.35.3=⨯==w t ns ξ3. 超调量σ%的计算%48.9%1006.0%100%221/6.01/=⨯=⨯=-⨯---eeππξξσ3-5设单位反馈系统的开环传递函数为)6.0(14.0)(++=s s s s G ,试求系统在单位阶跃输入下的动态性能。
解答:方法一:根据比例-微分一节推导出的公式)135(6.014.0)12/()1()(+⨯⨯+=++=s s s s s s K s G w T n d ξ1)5.2(4.0114.0)6.0(14.01)6.0(14.0)2()(1)()(22222+++=+++=+++++=+++=+=s s s s s s s s s s s zs z S G s G s s s w w s w nn dn ξφ)1()](1[12)1sin(1)(222222ξξξξξξξπψξddnddndnn ddn t arctg z arctg z r t w r t h ww w w zw e nd-+--+-=-+-=ψ+-+=-把z=1/Td=2.5,1=wn,5.0=ξd代入可得)3.8323sin(5.005.11)7.9623sin(5.005.11)( ---=--+=t e t t e t t h峰值时间的计算0472.1)1(2=-=ξξβdddarctg ,-1.6877=ψ158.312=--=ξβψdndpwt超调量得计算%65.21%10011%22=⨯--=-ξξξσddetrpd调节时间得计算29.6)ln(21ln )2ln(2131222=--+-+=-ww w z t ndn n d sd z ξξξ方法二:根据基本定义来求解闭环传递函数为114.0)6.0(14.01)6.0(14.0)(1)()(2+++=+++++=+=s s s s s s s s S G s G s s φ当输入为单位阶跃函数时)232()21(21.0)232()21(2)21(116.01)1(14.0)(22++-++++-+=++--+=+++=s s s s s s s s s s s C s s 得单位阶跃响应)23sin(1.0)23cos(1)(2121t t t h e et --⨯--=)3.8423sin(121+-=-t et )0(≥t 1. 峰值时间tp的计算 对h(t)求导并令其等于零得-0.5023)23cos()23sin(3.843.842121=⨯+-+︒-︒-t e t ep p t t p p3)23tan(3.84=+︒t pt p =2.9 2.超调量σ%的计算 %100)()()(%⨯∞∞-=h h h t p σ=17.49%3. 调节时间ts得计算05.0)84.523sin(21≤-⨯-t est s 5.33=t s3-6.已知控制系统的单位阶跃响应为 6010()10.2 1.2t th t e e --=+- ,试确定系统的阻尼比ζ和自然频率n ω。
第五章 频域响应法
第五章 频域响应法5-1 频率特性一. 频率特性的基本概念1. 所谓频率特性,即在零初始条件下,系统输入在正弦信号的控制下,其稳态输出C(t) 的被控制量信号的幅值A(ω)和相角ψ(ω)随r(t)信号的角频率ω变化的规律,记为G(j ω)。
G(j ω)=G(S)| s=j ω C(j ω) C(s)G(j ω)== R(j ω) R(s)| s=j ωb 0(j ω) m +b 1(j ω) 1+m +……+b 1-m (j ω)+b m G(j ω)=( j ω) n +a 1(j ω) 1-n +……a 1-n (j ω)+a n2、G(j ω)的数模表达式有两种标准式: (1)Nyquist 标准式:G(j ω)=︱G(j ω)︱e)(jw G j ∠=u(ω)+jv(ω)其中A(j ω)= ︱G(j ω)︱称为幅频特性,是ω的偶函数。
ψ(ω)= ∠G(j ω) 称为相频特性,是ω的奇函数。
u(ω)=Re [G(j ω)]为实部; v(ω)=Im [G(j ω)]为虚部。
(2)Bode 表达式:L (ω)=20lg [A(j ω) ] 称为对数幅频,ψ(ω)= ∠G(j ω) 称为对数相频。
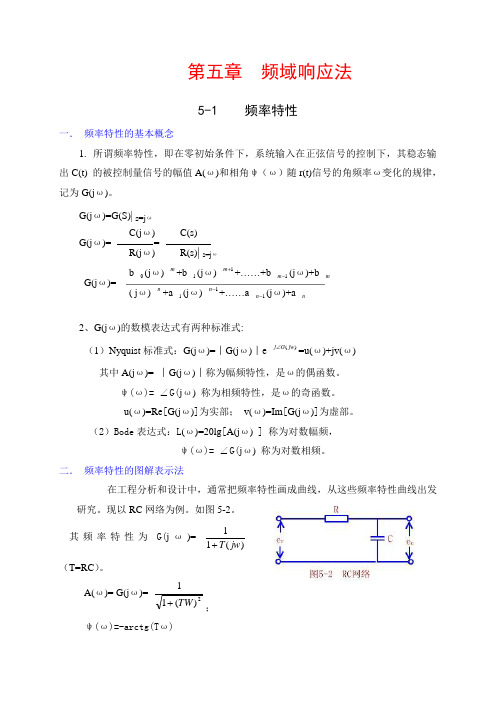
二. 频率特性的图解表示法在工程分析和设计中,通常把频率特性画成曲线,从这些频率特性曲线出发研究。
现以RC 网络为例。
如图5-2。
其频率特性为G(j ω)=)(11jw T +(T=RC )。
A(ω)= G(j ω)=2)(11TW +;ψ(ω)=-arctg(T ω)1.极坐标图----Nyquist图当ω=0→∞变化时,A(ω)和φ(ω)随ω而变,以A(ω)作幅值,φ(ω)作相角的端点在s平面上形成的轨迹,称Nyquist曲线(幅相频率特性曲线)简称幅相曲线即Nyquist图,是频率响应法中常用的一种曲线。
2、对数坐标图----Bode图对数频率特性曲线又称Bode曲线,包括对数幅频和对数相频两条曲线。
自动控制原理试-4

自动控制原理试-4(总分:100.00,做题时间:90分钟)一、(总题数:29,分数:100.00)1.已知某系统结构图如图所示,试根据频率特性物理意义,求当信号输入为r(t)=2sin(t+30°)+cos(2t-45°)时,系统的稳态输出c ss和稳态误差e ss。
(分数:2.00)__________________________________________________________________________________________ 正确答案:()解析:闭环传递函数;频率特性;;误差传递函数;误差频率特性;;当r 1(t)=2sin(t+30°)时,当r 2 (t)=cos(2t-45°)时,因此在输入作用下,2.最小相位系统对数幅频渐近特性如图所示,请确定系统的传递函数。
(分数:2.00)__________________________________________________________________________________________ 正确答案:()解析:由图知在低频段渐近线斜率为0,因为最小交接频率前的低频段L(ω)=-v20lgω,故v=0。
渐近特性为分段线性函数,在各交接频率处,渐近特性斜率发生变化。
在ω=0.1处斜率变化20dB/dec,属一阶微分环节。
在ω=ω1处斜率变化-20dB/dec,属惯性环节。
在ω=ω2处斜率变化-20dB/dec,属惯性环节。
在ω=ω3处斜率变化-20dB/dec,属惯性环节。
在ω=ω4处斜率变化-20dB/dec,属惯性环节。
因此,系统的传递函数具有下述形式式中,K,ω1,ω2,ω3,ω4待定。
由201gK=30得K=10 1.5≈31.62。
因渐近线直线段,若设某段的斜率为k,(ωA,L(ωA )),(ωB,L(ωB ))为该线段上的两点,则由直线方程:确定所以确定,所以确定,所以确定,所以于是,所求的传递函数为单位反馈控制系统的开环传递函数为:(分数:4.00)(1).求系统的幅值裕量为20dB时的K值。
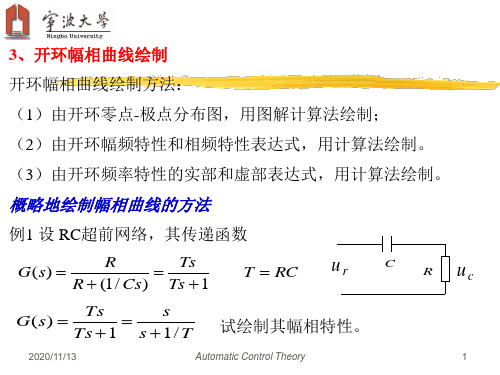
3、开环幅相曲线绘制开环幅相曲线绘制方法(1)由开环零点-极点
)
2型系统包含两个积分环节,例如
G(s)
K
s 2 (T1s 1)(T2 s 1)
G( j)
K
K
( j) 2 ( jT1 1)( jT2 1) 2 1 T12 2
() 180 arctgT1 arctgT2
2020/11/13
Automatic Control Theory
e j ( )
1 T22 2
起点: G( j0) A(0) K 终点: G( j) A() 0
G( j0) (0) 0o G( j) () 180o
与实轴的交点: Q(x ) 0 Q() K (T1 T2 ) /(1 T12 2 )(1 T22 2 ) 0
x 0
与虚轴的交点: P( y ) 0
P() K (1 T1T2 2 ) /(1 T12 2 )(1 T2 2 2 )
Hale Waihona Puke 变化的。例如P(0) K
0
G(s)
K(T1s 1)
(T2 s 1)(T3s 1)(T4 s 1)
n 3, m 1
G( j0) K0o , G( j) 0(1 3)90o 0 180o
2020/11/13
Automatic Control Theory
7
开环传递函数含有积分环节时的开环幅相曲线
T RC u r
C R uc
G(s) Ts s Ts 1 s 1/ T
试绘制其幅相特性。
2020/11/13
Automatic Control Theory
1
G( j) j T
T
j
(
arc
tgT
)
e2
jT 1 1 2T 2
自动控制原理02开环幅相曲线、频域判据、闭环指标
代入 Re[G( j )] ,得:
10 Re[G( j)] 3
5.3.1 开环幅相曲线的绘制方法
最小相位系统的起点与终点:
G( j 0 )
{
K0, 0
( 900 ), 0
K *,n m
G( j)
{
0(n m)(900 ),n m
5.3.2 频率稳定判据
G( j 0 ) (90 ) G( j) 03(900 )
0
K s (T1s 1)(T2 s 1)
Im
Re
0
5.3.2 频率稳定判据
与坐标轴的交点
K [(T1 T2 ) j (1 T1T2 2 )] K G( j ) j ( jT1 1)( jT2 1) (1 2T12 )(1 2T2 2 )
5.3 开环幅相曲线与频域稳定判据
5.3.1 开环幅相曲线的绘制方法
绘制概略开环幅相曲线的步骤:
(1)求取系统的开环频率特性函数
(2)确定开环幅相曲线的起点和终点; (3)确定开环幅相曲线与实轴的交点; (4)勾画出大致曲线。 所用知识:复数的运算
5.3.1 开环幅相曲线的绘制方法
例5-3 已知系统的开环传递函数为 : G ( s ) 试绘制系统的开环幅相曲线
正穿越:开环幅相曲线从 上往下穿越实轴的 (1,) 区段(幅角增加) 负穿越:开环幅相曲线从 下往上穿越实轴的 (1,) 区段(幅角减小)
Nyquist图 以原点为圆心的单位圆 单位圆内 单位圆外 负实轴
Bode图 0dB线
L ( ) 0 的区段 L( ) 0 的区段
( ) 从下向上穿越 线 正穿越:从上往下穿越实轴 (1,) 区段 正穿越:在 L() 0 区段内, ( ) 从上向下穿越 线 负穿越:从下往上穿越实轴(1,) 区段 正穿越:在 L() 0 区段内,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
例5-1系统的开环传递函数为
,()
试概略绘制系统的开环幅相曲线。
解开环系统由比例环节和两个惯性环节组成,开环频率特性为
幅频特性
相频特性
根据开环系统的幅频特性和相频特性,可以计算出时的幅值和相角,即得到幅相曲线的起始位置和终点位置。
由此可知,开环幅相曲线起始于正实轴,至原点的距离为K处,曲线的终点
在原点,且与负实轴相切进入原点,相角变化范围是。
大致的开环幅相曲线如图5-12所示。
例5-2 控制系统的开环传递函数为
试绘制系统大致的开环幅相曲线。
解与上例中的系统比较,开环传递函数中增加了一个积分环节,为1型系统。
幅相频率特性分别为
可知,相角变化范围:,开环幅相曲线起始于负实轴无穷远处,终点在原点,且曲线与正虚轴相切进入原点。
将频率特性写成实部与虚部的形式
分别称和为开环系统的实频特性和虚频特性。
在起点,
求幅相曲线与实轴交点(该点对于分析系统的稳定性非常重要),可令
,得
将代入实部,可得
系统的开环幅相曲线如图5-13所示。
若在系统的开环传递函数中再增加一个积分环节,即
则当时,,开环幅相曲线起始
于负实轴无穷远处,当,开环幅相曲线与正实轴相切进入原点,如图5-14所示。