同步带传动受力情况的分析
同步带传动受力情况的分析(压轴力与张紧力的计算)
同步带受力情况的分析 1 张紧力同步带安装时必须进行适当的张紧,以使带具有一定的初拉力(张紧力)。
初拉力过小会使同步带在运转中因齿合不良而发生跳齿现象,在跳齿的瞬间,可能因拉力过大而使带断裂或带齿断裂;初拉力过小还会使同步带传递运动的精度降低,带的振动噪音变大。
而初拉力过大则会使带的寿命降低,传动噪音增大,轴和轴承上的载荷增大,加剧轴承的发热和使轴承寿命降低。
故控制同步带传动合宜的张紧力是保证同步带传动正常工作的重要条件。
设0F 为同步带传动时带的张紧力,1F 、2F 、F 分别为带传动工作时带的紧边拉力、松边拉力、和有效拉力。
为了保证同步带在带轮上齿合可靠、不跳齿,同步带运转时紧边带的弹性伸长量与松边带的弹性收缩量应保持近似相等。
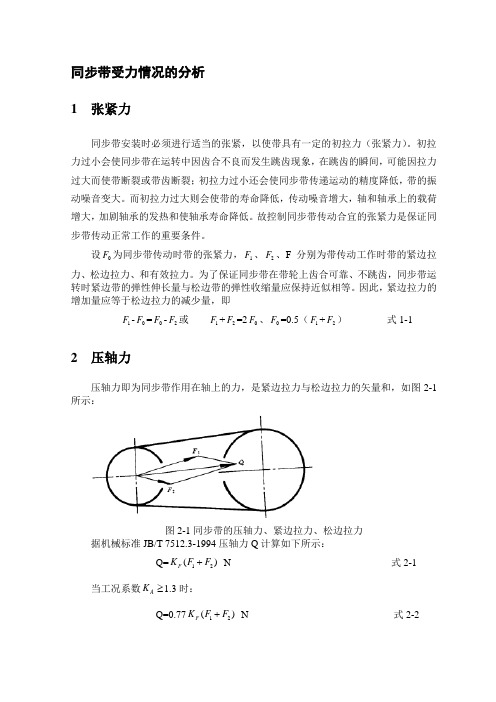
因此,紧边拉力的增加量应等于松边拉力的减少量,即1F -0F =0F -2F 或 1F +2F =20F 、0F =0.5(1F +2F ) 式1-12 压轴力压轴力即为同步带作用在轴上的力,是紧边拉力与松边拉力的矢量和,如图2-1所示:图2-1同步带的压轴力、紧边拉力、松边拉力据机械标准JB/T 7512.3-1994压轴力Q 计算如下所示:Q=12()F K F F + N 式2-1 当工况系数A K ≥1.3时:Q=0.7712()F K F F + N 式2-2式中: F K ――矢量相加修正系数,如图2-2:图2-2 矢量相加修正系数上图中1α为小带轮包角,21118057.3d daα-≈︒-⨯︒。
A K 为工况系数,对于医疗机械,其值如图2-3所示:图2-3 医疗机械的工况系数对于医疗机械,取A K =1.2,所以有压轴力Q=12()F K F F + N ,其中F K 值大于0.5。
另外由式1-1有张紧力0F =0.5(1F +2F )。
由此可看出压轴力大于张紧力,故设计时只需计算传动中所受的压轴力,Q=12()F K F F + N 。
而带的紧边张力与松边张力分别由下面公式所得:11250/d F P V = N 式2-32250/d F P V = N 式2-4式中: V 为带速,/m s ;d P 为设计功率,d A P K P =,KW ;A K 为工况系数,P 为需传递的名义功率(KW )。
同步带传动受力情况的分析(压轴力与张紧力的计算)
同步带受力情况的分析 1 张紧力同步带安装时必须进行适当的张紧,以使带具有一定的初拉力(张紧力)。
初拉力过小会使同步带在运转中因齿合不良而发生跳齿现象,在跳齿的瞬间,可能因拉力过大而使带断裂或带齿断裂;初拉力过小还会使同步带传递运动的精度降低,带的振动噪音变大。
而初拉力过大则会使带的寿命降低,传动噪音增大,轴和轴承上的载荷增大,加剧轴承的发热和使轴承寿命降低。
故控制同步带传动合宜的张紧力是保证同步带传动正常工作的重要条件。
设0F 为同步带传动时带的张紧力,1F 、2F 、F 分别为带传动工作时带的紧边拉力、松边拉力、和有效拉力。
为了保证同步带在带轮上齿合可靠、不跳齿,同步带运转时紧边带的弹性伸长量与松边带的弹性收缩量应保持近似相等。
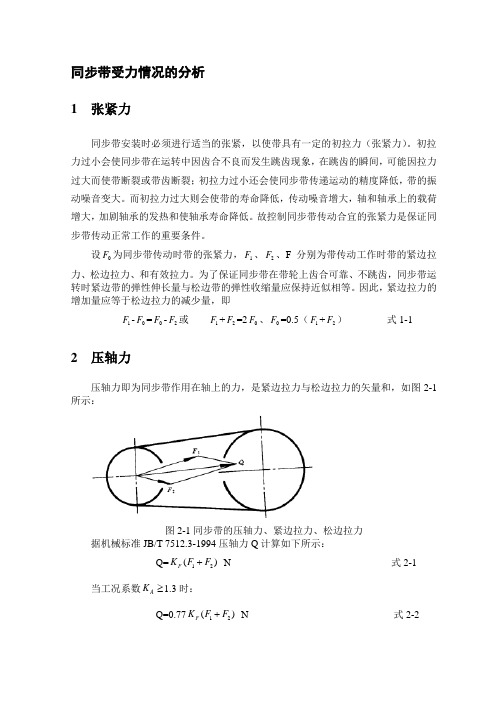
因此,紧边拉力的增加量应等于松边拉力的减少量,即1F -0F =0F -2F 或 1F +2F =20F 、0F =0.5(1F +2F ) 式1-12 压轴力压轴力即为同步带作用在轴上的力,是紧边拉力与松边拉力的矢量和,如图2-1所示:图2-1同步带的压轴力、紧边拉力、松边拉力据机械标准JB/T 7512.3-1994压轴力Q 计算如下所示:Q=12()F K F F + N 式2-1 当工况系数A K ≥1.3时:Q=0.7712()F K F F + N 式2-2式中: F K ――矢量相加修正系数,如图2-2:图2-2 矢量相加修正系数上图中1α为小带轮包角,21118057.3d daα-≈︒-⨯︒。
A K 为工况系数,对于医疗机械,其值如图2-3所示:图2-3 医疗机械的工况系数对于医疗机械,取A K =1.2,所以有压轴力Q=12()F K F F + N ,其中F K 值大于0.5。
另外由式1-1有张紧力0F =0.5(1F +2F )。
由此可看出压轴力大于张紧力,故设计时只需计算传动中所受的压轴力,Q=12()F K F F + N 。
而带的紧边张力与松边张力分别由下面公式所得:11250/d F P V = N 式2-32250/d F P V = N 式2-4式中: V 为带速,/m s ;d P 为设计功率,d A P K P =,KW ;A K 为工况系数,P 为需传递的名义功率(KW )。
同步带传动受力情况的分析(压轴力与张紧力的计算)
同步带传动受力情况的分析(压轴力与张紧力的计算)同步带受力情况的分析1 张紧力同步带安装时必须进行适当的张紧,以使带具有一定的初拉力(张紧力)。
初拉力过小会使同步带在运转中因齿合不良而发生跳齿现象,在跳齿的瞬间,可能因拉力过大而使带断裂或带齿断裂;初拉力过小还会使同步带传递运动的精度降低,带的振动噪音变大。
而初拉力过大则会使带的寿命降低,传动噪音增大,轴和轴承上的载荷增大,加剧轴承的发热和使轴承寿命降低。
故控制同步带传动合宜的张紧力是保证同步带传动正常工作的重要条件。
设0F 为同步带传动时带的张紧力,1F 、2F 、F 分别为带传动工作时带的紧边拉力、松边拉力、和有效拉力。
为了保证同步带在带轮上齿合可靠、不跳齿,同步带运转时紧边带的弹性伸长量与松边带的弹性收缩量应保持近似相等。
因此,紧边拉力的增加量应等于松边拉力的减少量,即1F -0F =0F -2F 或 1F +2F =20F 、0F =0.5(1F +2F ) 式1-1 2 压轴力压轴力即为同步带作用在轴上的力,是紧边拉力与松边拉力的矢量和,如图2-1所示:图2-1同步带的压轴力、紧边拉力、松边拉力据机械标准JB/T 7512.3-1994压轴力Q 计算如下所示:Q=12()F K F F + N 式2-1 当工况系数A K ≥1.3时:Q=0.7712()F K F F + N 式2-2式中: F K ――矢量相加修正系数,如图2-2:图2-2 矢量相加修正系数上图中1α为小带轮包角,21118057.3d d aα-≈︒-⨯︒。
A K 为工况系数,对于医疗机械,其值如图2-3所示:图2-3 医疗机械的工况系数对于医疗机械,取A K =1.2,所以有压轴力Q=12()F K F F + N ,其中F K 值大于0.5。
另外由式1-1有张紧力0F =0.5(1F +2F )。
由此可看出压轴力大于张紧力,故设计时只需计算传动中所受的压轴力,Q=12()F K F F + N 。
带传动的受力分析及运动特性
带传动的受力分析及运动特性传动是指通过机械装置将动力或运动传递到其他部件的过程。
在工程中,传动系统通常用于将动力从一个地方传递到另一个地方,并且提供所需的力,扭矩或速度。
传动系统有助于构建复杂的机械装置,并将输入和输出的动力和运动特性相互匹配。
带传动是一种常见的传动方式,它通过一根或多根带子将动力传递到其他部件。
带传动具有以下几个特点:1.动力传递:带传动能够将旋转动力从一个轴传递到另一个轴上。
通过张紧或松弛带子,可以调整传递的功率和速度。
2.扭矩传递:带传动还能够传递扭矩,即转动力矩。
带子的张力越大,传递的扭矩越大。
3.速比调整:通过改变带子的直径或使用不同直径的滚轮,可以调整带传动的速比。
这样可以在需要时增加或减小输出轴的速度。
4.隔振性能:带传动能够吸收和隔离一些机械振动,从而减少对整个机械系统的影响。
这对于要求平稳运行的机械设备尤为重要。
5.简化设计:相比其他传动方式,带传动具有简单的设计和安装过程。
带子的材料选择丰富,可以根据不同需求选择适当的带子。
带传动的工作原理是通过将动力从一个驱动轴传递到带子上,然后再将其传递到从轴或其他机械部件上。
传动的力分析是确定带子和滚轮上的受力分布,以保证传动的稳定性和有效性。
在带传动中,带子受到张力的作用,并贴紧在滚轮上。
当带子与滚轮接触时,传动力会使带子跳跃或滑动,这会导致一些能量损失。
传动系统的损失主要包括弯曲损失,弯曲挠度损失和摩擦损失。
弯曲损失是由于带子在弯曲过程中发生的能量损失,而弯曲挠度损失是带子由于挠度而发生的额外能量损失。
摩擦损失是由于带子与滚轮接触而产生的能量损失。
为了最大程度地减少能量损失,需要正确选择带子的材料和尺寸,并保持带子与滚轮的适当接触。
此外,还需定期检查和维护带传动系统,以确保其正常工作。
带传动的运动特性主要取决于带子和滚轮的尺寸和特性。
带子的宽度、长度、材料和抗滑性能会影响传动的精度和效率。
滚轮的直径和形状也会影响传动的速比和扭矩传递能力。
同步带能承受的拉力

同步带能承受的拉力
同步带是一种常见的传动元件,常用于工业生产线上的机械传动系统中。
同步带能够承受的拉力是根据其材料和结构设计来确定的。
通常情况下,同步带的拉力强度在数千牛至几万牛之间。
同步带的承受拉力与其材料的强度、宽度、厚度、齿形等因素相关。
在同步带的材料选择上,通常会选用高强度的化学合成材料,例如聚氨酯、玻璃齿、碳纤维等。
同时,同步带的宽度和厚度越大,其承受的拉力也越大。
在实际应用中,同步带的承受拉力还与其使用环境和工作条件有关。
例如,在高温、高湿度、高速等环境下,同步带的承受能力会有所降低。
因此,在选择同步带时,需要根据实际需求和使用条件综合考虑,确保同步带能够承受所需的拉力和使用寿命。
- 1 -。
同步带传动受力情况的分析(压轴力与张紧力的计算)[精品文档]
![同步带传动受力情况的分析(压轴力与张紧力的计算)[精品文档]](https://img.taocdn.com/s3/m/f4d96dc704a1b0717fd5dd6b.png)
同步带受力情况的分析1 张紧力同步带安装时必须进行适当的张紧,以使带具有一定的初拉力(张紧力)。
初拉力过小会使同步带在运转中因齿合不良而发生跳齿现象,在跳齿的瞬间,可能因拉力过大而使带断裂或带齿断裂;初拉力过小还会使同步带传递运动的精度降低,带的振动噪音变大。
而初拉力过大则会使带的寿命降低,传动噪音增大,轴和轴承上的载荷增大,加剧轴承的发热和使轴承寿命降低。
故控制同步带传动合宜的张紧力是保证同步带传动正常工作的重要条件。
设0F 为同步带传动时带的张紧力,1F 、2F 、F 分别为带传动工作时带的紧边拉力、松边拉力、和有效拉力。
为了保证同步带在带轮上齿合可靠、不跳齿,同步带运转时紧边带的弹性伸长量与松边带的弹性收缩量应保持近似相等。
因此,紧边拉力的增加量应等于松边拉力的减少量,即1F -0F =0F -2F 或 1F +2F =20F 、0F =0.5(1F +2F ) 式1-1 2 压轴力压轴力即为同步带作用在轴上的力,是紧边拉力与松边拉力的矢量和,如图2-1所示:图2-1同步带的压轴力、紧边拉力、松边拉力据机械标准JB/T 7512.3-1994压轴力Q 计算如下所示:Q=12()F K F F + N 式2-1 当工况系数A K ≥1.3时:Q=0.7712()F K F F + N 式2-2式中: F K ――矢量相加修正系数,如图2-2:图2-2 矢量相加修正系数上图中1α为小带轮包角,21118057.3d d aα-≈︒-⨯︒。
A K 为工况系数,对于医疗机械,其值如图2-3所示:图2-3 医疗机械的工况系数对于医疗机械,取A K =1.2,所以有压轴力Q=12()F K F F + N ,其中F K 值大于0.5。
另外由式1-1有张紧力0F =0.5(1F +2F )。
由此可看出压轴力大于张紧力,故设计时只需计算传动中所受的压轴力,Q=12()F K F F + N 。
而带的紧边张力与松边张力分别由下面公式所得:11250/d F P V = N 式2-32250/d F P V = N 式2-4式中: V 为带速,/m s ;d P 为设计功率,d A P K P =,KW ;A K 为工况系数,P 为需传递的名义功率(KW )。
机械设计基础-7.2带传动的工作情况分析

在各类机械中应用广泛,但摩擦式带传动不适用于对传动比有精确要求的场合。
带传动的工作情况分析是指带传动的受力分析、应力分析、运动分析。
带传动是一种挠性传动,其工作情况具有一定的特点。
一、带传动的受力分析工作拉力带传动尚未工作时,传动带中的预紧力为F0。
带传动工作时,一边拉紧,一边放松,记紧边拉力为F1和松边拉力为F2。
设带的总长度不变,根据线弹性假设(环形带的总长度不变,则可推出紧边拉力的增量应该等于松边拉力的减量):F1-F0=F0-F2;或:F1 +F2=2F0;记传动带与小带轮或大带轮间总摩擦力为Ff ,其值由带传动的功率P 和带速v 决定。
定义由负载所决定的传动带的有效拉力为Fe =P/v ,则显然有Fe =Ff 。
取绕在主动轮或从动轮上的传动带为研究对象 ,有:Fe =Ff =F1-F2;因此有: F1=F0+Fe /2;F2=F0-Fe /2;工作中有效拉力的大小取决于所传递功率的大小。
即:)(1000KW V F P e =显然承载能力的大小取决于带两端的拉力差,而不是某个力的大小。
需要传递的功率越大,需要的有效拉力越大。
二、带传动的最大有效拉力及其影响因素带传动的最大有效拉力Fec 有多大?由欧拉公式确定刚刚打滑时,带两端的拉力关系式为: 欧拉公式给出的是带传动在极限状态下各力之间的关系,或者说是给出了一个具体的带传动所能提供的最大有效拉力Fec 。
由欧拉公式可知:(预紧力F0↑→最大有效拉力Fec ↑(包角α↑→最大有效拉力Fec ↑摩擦系数 f ↑→最大有效拉力Fec ↑可知影响带的承载能力的因素:f 、α、0F 。
但注意各个参数都不能过大或过小。
如:初张力太大,带易断裂,拉应力增大,轴上的受力同时增大;相反,太小,易打滑。
μ太大,带轮就要作得粗糙,带易磨损;一般都采用打蜡,在带轮表面加沥青等方法加大摩擦系数。
包角与中心距有关,包角太大,中心距增大,但太大会使结构庞大。
当已知带传递的载荷时,可根据欧拉公式确定应保证的最小初拉力F0。
带传动工作情况分析

截面形状为圆形, 牵引能力小,常 用于仪器和家用 电器中。
相当于平带与多根 V带的组合兼有两 者的优点,适于传 递功率较大要求结 构紧凑场合。
带传动的优缺点
优点: ❖ 远距离传动 ❖ 可缓冲、减振,运转平稳 ❖ 过载保护 ❖ 结构简单, 精度低, 成本低
缺点: ❖ 外廓尺寸大 ❖ 弹性滑动,传动比不固
❖ 当带传动达到打滑的临界状态时,带与带轮间的 摩擦力达到极限值,这时带传动的有效拉力达到 最大值Fmax,
❖ 紧边与松边的拉力可用欧拉公式表示,即:
❖ F1/F2=efa ❖ e ----自然对数的底 ❖ F----带与带轮间的摩擦系数 ❖ a----包角
所以最大有效拉力为:
F
max
2
F0
(
e e
参数
❖ 节距p—相邻两销轴中心之距离 ❖ 链长— 链节数
偶数 (直接联接) Lp 奇数 (用过渡链节联接)
❖ 链节数为偶数时,刚好内、外 链板相连,再用开口销或弹簧 锁住活动销轴;为奇时,采用 过渡链节
2 齿形链
❖ 无声链 结构: ❖ 链板(带两个齿,交错并列铰
接) 、导板(防侧向窜动)
❖ 由许多以铰链连接的齿形链板锁构成 传动平稳,无声链;链板的齿形与链轮轮 齿互相啮合
噪音高→动载荷 → 不宜高速 传动)外廓尺寸大
一、链
❖ 传动链可分为:滚子链、齿形链
1 滚子链(套筒滚子链)
组成: ❖ 内、外链板,套筒,销轴,滚子
配合状况: ❖ 内链板、套筒之间—过盈配合 ❖ 外链板、销轴之间—过盈配合 ❖ 套筒、销轴之间—间隙配合,使内链板 外链板 套筒 销轴 滚子
内外链板能相对转动 ❖ 链板形状的特点→等强度
v1 πd1n1 / 60*1000 v2 πd 2n2 / 60*1000
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
同步带受力情况的分析
1 张紧力
同步带安装时必须进行适当的张紧,以使带具有一定的初拉力(张紧力)。
初拉力过小会使同步带在运转中因齿合不良而发生跳齿现象,在跳齿的瞬间,可能因拉力过大而使带断裂或带齿断裂;初拉力过小还会使同步带传递运动的精度降低,带的振动噪音变大。
而初拉力过大则会使带的寿命降低,传动噪音增大,轴和轴承上的载荷增大,加剧轴承的发热和使轴承寿命降低。
故控制同步带传动合宜的张紧力是保证同步带传动正常工作的重要条件。
设0F 为同步带传动时带的张紧力,1F 、2F 、F 分别为带传动工作时带的紧边拉力、松边拉力、和有效拉力。
为了保证同步带在带轮上齿合可靠、不跳齿,同步带运转时紧边带的弹性伸长量与松边带的弹性收缩量应保持近似相等。
因此,紧边拉力的增加量应等于松边拉力的减少量,即
1F -0F =0F -2F 或 1F +2F =20F 、0F =(1F +2F ) 式1-1 2 压轴力
压轴力即为同步带作用在轴上的力,是紧边拉力与松边拉力的矢量和,如图2-1所示:
图2-1同步带的压轴力、紧边拉力、松边拉力
据机械标准JB/T 压轴力Q 计算如下所示:
Q=12()F K F F + N 式2-1 当工况系数A K ≥时:
Q=12()F K F F + N 式2-2 式中: F K ――矢量相加修正系数,如图2-2:
图2-2 矢量相加修正系数
上图中1α为小带轮包角,21118057.3d d a
α-≈︒-⨯︒。
A K 为工况系数,对于医疗机械,其值如图2-3所示:
图2-3 医疗机械的工况系数
对于医疗机械,取A K =,所以有压轴力Q=12()F K F F + N ,其中F K 值大于。
另外由式1-1有张紧力0F =(1F +2F )。
由此可看出压轴力大于张紧力,故设计时只需计算传动中所受的压轴力,Q=12()F K F F + N 。
而带的紧边张力与松边张力分别由下面公式所得:
11250/d F P V = N 式2-3
2250/d F P V = N 式2-4
式中: V 为带速,/m s ;
d P 为设计功率,d A P K P =,KW ;A K 为工况系数,P 为需传递的名义功率(KW )。
所以压轴力为: 1500F A K K P Q V
= N 式2-5 对于频繁正反装、严重冲击、紧急停机等非正常传动,需视具体情况修正工况系数。
另外步进电机在工作时其工作过程是“加速-匀速-减速”的过程。
在匀速时,电机所受负载为工件与导轨的滑动负载;电机加速时主要考虑惯性负载;如电机直接启动,即转速直接从0跳到所规定的转速时,电机的滑动负载和惯性负载均要考虑。
一般情况下电机传递的负载约为滑动负载的2~3倍。
所以对于频繁正反转、严重冲击的传动机构,设计计算时:同步带需传递的名义功率应是同步带正常传动需传递的功率的2~3倍。
从结构上讲:如所需的压轴力小于步进电机轴容许的悬挂负载,即可不必加
下表为东方马达步进电机容许悬挂负载及容许轴向负载:
表2-1东方马达步进电机容许悬挂负载及容许轴向负载上表中各系列步进电机所对应的外形尺寸及轴的大小如图2-4、2-5、2-6所示:
图2-4 CMK24系列电机主要尺寸图
图2-5 CMK25系列电机主要尺寸图
图2-6 CMK26系列电机主要尺寸图
设计时根据所设计的传动系统即可计算出作用在步进电机轴上的压轴力,再根据所涉及的步进电机由上图表中查出电机轴的容许负载,两相比较,只要压轴力小于电机轴的容许悬挂负载即可。
1500F A K K P Q V
N 式2-5 中可看出作用在电机轴上的压轴力受所需传递的功率、速度以及实际传动情况的影响。
在应用中减少压轴力的方法有:
1 减少同步带小带轮的包角,即采用小带轮带大带轮的形式,这样可以减少F K 值(F K <1);
2 在满足设计要求的情况下减少同步带的宽度,并安装时使同步带离步进电机轴的端面更远,这样可增加电机所容许的悬挂负载。
3 同步带张紧的检测
同步带的张紧是靠加张紧轮的形式来控制的,如图3-1:
图3-1 同步带的张紧
张紧力通常是通过在带与带轮的切点中心,加一垂直于带的载荷Wd ,使其产生规定的挠度f 来控制的,如图3-2:
图3-2 同步带的检验
对于公司常用的圆弧齿同步带,3m及5m型号的同步带所对应的载荷Wd如下图:检测时一般应控制f 20mm,如a特别大或特别小,则应相应增减Wd值。