基于单神经元PID控制的双旋翼实验平台系统研究
基于PLC的单神经元PID控制器的设计与实现
( 北京联合大学 自动化学 院 ,北京 1 O O ) O l 1 摘 要 : 本文对于大滞后 、时变 和非线性的复杂系统 ,常规PI控制显得无 能为 力。将神 经网络与常规 D PD 控制相结合 ,构成单神 经元自适应PD 制器 。给 出了基于P C的单神经元PD I I控 L I控制系统结
构 ,重点介绍了单神经 元PD I 控制算法原理 ,并用结构控制语言编写 了单神经元P 控制算法功 I D 能块 ,该控制功 能块具有通用性且易于移植 。经 实例证 明 ,与传统PD I控制器相比较 ,单神经 元PD I控制器可以显著改善 系统的性能。
关键词 : 单神经元 ;PD;P C;结 构控 制语言 I L
的 并 行 结构 和 学 习 记忆 功 能 ,并 且 结 构 简 单 , 易 于 实现 。 以 P C作 为 控 制 器构 成 的 单 神 经 元 P D控 制 L I
样 时刻控 制器 的输 出值 。
根据 ()式可得 到增 量式 PD 控制 算法 为 : 2 I
A () uk :K。 () ek一)+K e ) [ 一 ( 1] ( + P
‘
,
() 3
K lk一 e —) e 一 ) d ( 2( 1+ ( 2J e) k k
系统 如 图 1 所示 。图 1中虚线 部分 为单 神经 元 P D I
控 制 器 。检 测 元 件 将 被 控 量 实 际值 Y测 量 转 换 为 15 电 压 信 号 或 42 mA 电 流 信 号 ,该 模 拟 信 号 -V —0
北京联 合大学校级科研项 目 (k 0 9 0 ) z 2 0 2 x 作者简介:任俊杰 (9 2 17 -),女 ,河北石家庄人,讲师 ,硕士 ,主要从事 自动控制和控制工程的教学与研究工作。
单神经元PID控制仿真与实现研究

单神经元PID控制仿真与实现研究
鲁博;张寿明;冯欣怡;郭英英
【期刊名称】《工业仪表与自动化装置》
【年(卷),期】2024()1
【摘要】经典PID控制参数整定方法繁琐并且容易对设备造成损伤,此外,当系统对象存在非线性、环境变化或者其他因素时,系统的稳定性和响应速度也会受到一定的影响。
为了解决这些问题,该文引入神经网络与PID控制方法相结合,控制对象选择双容水箱,对系统进行多次仿真、对比,然后提出神经网络控制仿真参数设置方法,进而将神经网络PID控制算法应用于实际控制系统中,实验证明该创新方案不仅解决了PID控制方法存在的问题,还找到了一个低成本的升级方案,为控制系统提供了重要的技术支持。
【总页数】6页(P3-8)
【作者】鲁博;张寿明;冯欣怡;郭英英
【作者单位】陕西科技大学镐京学院咸阳市人工智能重点实验室;昆明理工大学信息工程与自动化学院;西安工商学院计算机学院
【正文语种】中文
【中图分类】TP27
【相关文献】
1.基于比例系数改进的单神经元PID控制及仿真研究
2.单神经元PID控制器仿真及其PLC实现
3.基于Proteus的变增益单神经元PID控制仿真研究
4.单神经元自适应PID控制器的实现与仿真研究
5.单神经元PID控制器仿真及其PLC实现
因版权原因,仅展示原文概要,查看原文内容请购买。
基于PLC的单神经元PID控制器的实现2
基于PLC的单神经元PID控制器的实现任俊杰自动化学院,北京联合大学,北京,100101,中国******************.cn摘要:考虑到复杂的控制系统非线性,纯滞后,大惯性,以及随时间变化的特点,传统的PID控制算法通常未能获得较好的控制效果。
将神经网络控制算法与传统的PID控制算法结合起来,神经元自适应PID控制能有效地提高了系统的性能。
本文设计的基于PLC的是一个单一的神经元PID控制器。
该控制系统的结构是简单的。
实现单神经元PID算法的功能块程序写在结构控制语言(SCL)。
该函数块具有常用和方便的特点。
实验结果表明,这种方法不仅高效,而且实用。
关键词:单神经元,PID,PLC,SCLI.简介由于PID控制算法简单,易于实施和良好的鲁棒性,它被广泛应用于工业过程控制系统。
但是,对于一个复杂的控制系统的非线性,纯时间延迟,大惯量和随时间变化的特性,传统的PID控制算法通常不能获得更好的控制效果。
添加先进的智能控制传统的PID控制算法,控制效果会更理想。
具有近似任意连续有界非线性函数的功能,神经网络是一种来解决非线性系统和不确定的系统有效的方式[1]。
在本文中,神经网络与传统的PID控制结合为应用PLC的神经自适应PID控制器。
他们发挥各自的优势。
与传统的PID控制相比,它具有超调小,控制高精度,抗干扰性能强的优点。
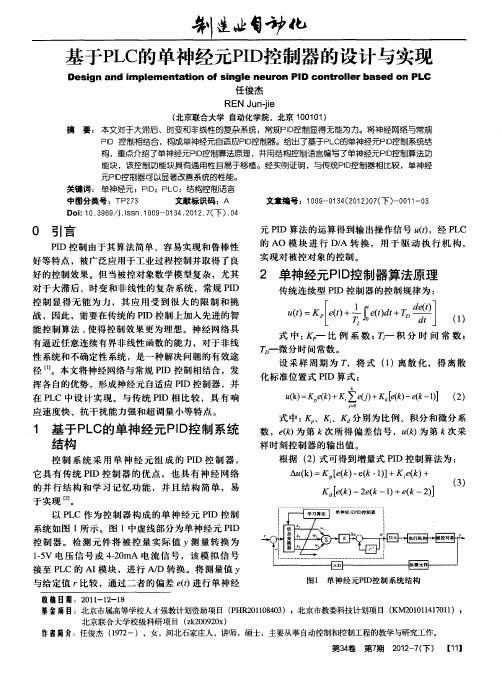
II.基于PLC的控制系统的结构单神经元PID控制器被应用到控制系统。
它具有传统PID的优点,并且还具有神经网络的优点,如并联结构,结构简单,学习和记忆功能和以及容易实现的特点[2]。
图1显示了用PLC作为控制器的单神经元PID控制系统。
图1中的虚线表示的是单个神经元PID控制器。
实际输出值y用计量装置转换为1-5V的电压信号或4-20mA的电流信号。
模拟信号连接到PLC的AI模块进行A / D转换。
用户程序中,比较了测量值y与设定值r,误差e测量和转换为三个输入信号的单神经元对应的比例,也比较了积分和差的功能。
基于单神经元自适应PID联合动力装置实验台的测功机控制器研究

基于单神经元自适应PID联合动力装置实验台的测功机控制
器研究
谢春玲;张正一;张晓云
【期刊名称】《燃气轮机技术》
【年(卷),期】2005(018)004
【摘要】根据PID控制结构提出一种新型的单神经元自适应PID控制器,并对其基本结构和学习算法进行了分析.结合舰船电力推进原动机多模块化组合实验台的控制要求,对实验台负荷特性模拟设备一水力测功机的常规PID控制器进行改进,满足了实验台在不同工况下实验的要求,同时也为各种组合模块的性能研究提供了可靠的试验平台.
【总页数】4页(P54-57)
【作者】谢春玲;张正一;张晓云
【作者单位】哈尔滨工程大学动力与核能学院,黑龙江,哈尔滨,150001;哈尔滨工程大学动力与核能学院,黑龙江,哈尔滨,150001;哈尔滨工程大学动力与核能学院,黑龙江,哈尔滨,150001
【正文语种】中文
【中图分类】TK0231.9
【相关文献】
1.基于模型参考自适应的单神经元PID控制器设计 [J], 佘致廷;秦亚胜;杨婷;董旺华
2.基于单神经元自适应PID控制器直流调速系统的研究 [J], 王晓东;陈伯时
3.基于单神经元自适应PID控制器的无刷直流电动机控制方法研究 [J], 严卫;王育才;孙希通
4.基于单神经元的PID自适应控制器的仿真研究 [J], 李璟;陈明凯
5.基于SIMULINK的单神经元自适应PID控制器研究 [J], 杜晓婷;方飞
因版权原因,仅展示原文概要,查看原文内容请购买。
单神经元PID控制报告
一、目的 (2)二、设备及条件 (2)三、设计及实验过程 (2)1. 单神经元自适应控制器结构 (2)2、神经元的学习规则 (3)3、实验过程 (3)4、实验探究 (5)探究1:神经元比例系数K对输出结果的影响 (5)探究2:学习速率对输出结果的影响 (7)探究3:权系数初值对输出结果的影响 (9)四、实验结果分析 (10)五、思考题 (11)六、程序清单 (11)单神经元PID 控制一、目的1.熟悉单神经元PID 控制器原理。
2.通过实验进一步掌握有监督的Hebb 学习规则及其算法仿真。
二、设备及条件1.计算机系统。
2.MATLAB 仿真软件三、设计及实验过程1. 单神经元自适应控制器结构图1 单神经元自适应控制器原理图设输入为r; 输出为y; 误差e=r-y ;控制信号为u ;三个状态量x1(k)=e(k);x2(k)=e(k)-e(k-1);X3(k)=e(k)-2*e(k-1)+e(k-2);神经元产生的控制信号为:31()(1)()(),0i i i u k u k k k x k k ω==-+>∑其中()i k ω为对应于()i x k 的权系数,单神经元控制器的自适应功能是通过学习改变连接权值来实现的。
K 为神经元的比例系数,且K>0。
2、神经元的学习规则学习规则是修正神经元之间的连接强度或加权系数的算法,使获得的知识结构适应周围环境的变化,学习过程由学习期和工作期两个阶段组成。
在学习期中,执行学习规则,修正加权系数。
在工作期内,连接权值固定,计算神经元的输出。
学习算法就是调整连接权值()i k ω的规则,它是单神经元控制器的核心,并反映了其学习的能力。
我们采用的学习规则是有监督的Hebb 学习规则,它是无监督的Hebb 学习规则和有监督的Delta 相结合的学习规则。
学习算法规范化处理后为:311311111222333()(1)()()()()/()(1)()()()()(1)()()()()(1)()()()()i i i ii i i i p d u k u k k k x k k k k k k u k z k x k k k u k z k x k k k u k z k x k ωωωωωωηωωηωωη===-+=+=++=++=+∑∑p η,i η,d η分别为比例学习速率,微分学习速率,积分学习速率。
基于单神经元自适应PID电液伺服位置控制系统开发应用研究
假 定 在 任 意 时 刻 活 塞 处 于距 中 间位 置 偏 移 为 Y的 位 置 时 , 时 液 压 缸 左 右 两 边 的 容 积 分 别 为 、 V 其 中 此 , 、 o; o
Vo 一 V1+ A1・Y、 2 V2 + A2・( 1 o Vo 一 o L— ) 。
由此 , 压 缸 左 右 两 腔 的 流 量连 续 性 方 程 为 ; 液
维普资讯
20 0 6年 第 3期
桂林 航天工 业高等 专科 学校学 报
( 总第 4 3期 ) J U N LO UII O L G FAE O P C E HN L G 机 电技 术应 用 O R A FG LN C L E EO R S A ET C O O Y
由伺 服 阀 的 负 载 压 力 一 流 量 特 性 , 压 缸 流 量 连续 性 液 方 程 和液 压 缸 中 活 塞 的 力 平 衡 方 程 三 个方 面来 建 立 单 作 用 液 压伺 服 位 置 系 统 的数 学 模 型 。 在 图 1 1所 示 的 系 统 中 , . 并 按 电流 的 流 向 分 两 种 情 况 , 依 据 文 献 [ 1 立 系 统 的 数 并 2建 学 模 型有 ( 0来 分 析 ) 以 : 1伺 服 阀 的 线 性 化 流 量 方 程 : )
Q1 K — K 1 = i P Q2 K — K 2 = i P ( .) 1 1 ( .) 1 2
油 量 和 出 油量 假 设 为一 负 载 流量 。这 种 方 法建 模 虽 然 较 简
单 , 较 宽 的 工作 范 围 具 有 实 用 价 值 , 是该 模 型不 能 反 映 在 但
关键词
单神经元 ;I ; PD 电液伺服位置系统 ;A V E ; 适应控制 L B IW 自
基于单神经元PID控制器的四旋翼飞行器 航迹控制
(1)
3.2. 位置控制
四旋翼飞行器飞行任务由任务规划、路径规划和姿态控制组成。飞行器在空中悬停,当俯仰或横滚 获得一个偏航角产生加速度时,飞行器由初始点进行旋进运动匀速飞向目标点。要使飞行器保持匀速飞 行,必须进行姿态控制使当前姿态角快速收敛于目标姿态角。 假设目标点坐标为 ( xd , yd , zd ) ,飞行器当前的位置坐标 ( x, y, z ) ,可通过 GPS 和气压计计算出(GPS 计算出经度和纬度的是地里坐标系,转换到欧拉坐标系为 x, y 轴,气压计算出高度为 x 轴)。飞行器在悬 停后以加速度 α 向目标坐标点飞行,改变 1 个电机的转速提供合适的升力,其余三个电机的转速保持悬 停时转速一致。忽略空气阻力的影响,升力分解为:
罗林,李中志
在此基础上设计双闭环单神经元 PID控制器,并根据其动力学特性分析加速度对航迹跟踪,使飞行器 飞行轨迹稳定。 模型的建立与仿真实验都采用Matlab/Simulink平台, 仿真结果证实此方法的可行性。
关键词
四旋翼无人飞行器,单神经元PID控制器,加速度,航迹跟踪
Copyright © 2017 by authors and Hans PublishБайду номын сангаасrs Inc. This work is licensed under the Creative Commons Attribution International License (CC BY). /licenses/by/4.0/
T
3) 机体的质心与机体坐标原点重合。
− π 2 < ψ < π 2 ,如图 1 所示。 cosψ 绕 z 轴旋转矩阵 Rz = − sinψ 0
单神经元自适应 PID 控制器及其仿真研究论文
单神经元自适应 PID 控制器及其仿真研究摘要:随着科学技术的不断发展和进步,被控对象变得越来越复杂,传统的pid控制器对时变系统和非线性系统往往得不到较好的控制效果。
本文重点研究了单神经元自适应pid控制器,分析了学习规则,并对控制对象的跟踪特性做出了仿真研究。
仿真结果表明,这种控制器不但具有pid控制的优点而且还具有自适应特点,具有良好的控制性能。
关键词:单神经元;pid;自适应;仿真【中图分类号】g4201.单神经元自适应pid控制器单神经元作为构成神经网络的基本单位,具有自学习和自适应能力,而且结构简单易于计算。
而传统的pid控制器也具有结构简单、调整方便和参数整定与工程指标联系密切等特点。
若将这两者结合,则可以在一定程度上解决传统pid控制器不易在线实时整定参数、难于对一些复杂过程和参数慢时变系统进行有效控制的不足。
用神经元实现的自适应pid控制器的结构框图如图1-1所示:单神经元控制系统的结构如图1所示。
图中转换器的输入为设定值r(k)和输出y(k),转换器的输出为神经元学习所需要的状态量x1,x2,x3,k为神经元的比例系数。
神经元自适应控制器的控制算法为:单神经元的控制算法中的权系数wi(k)可以通过自学习功能进行自适应调整,单神经元自适应pid控制器正是通过对加权系数的调整来实现自适应、自学习功能的。
加权系数的调整可以采用不同的学习规则,从而构成不同的控制算法。
2、单神经元自适应pid控制器学习规则2.1 有监督hebb学习规则对于有监督的hebb学习规则由于加权系数wi(k)和神经元的输入、输出和输出偏差三者的相关函数有关,因此采用有监督hebb 学习算法时有(1-12)(1-13)根据无监督的hebb学习规则的推导,可以得到(1-14)同样为保证这种单神经元自适应控制学习算法的收敛性和鲁棒性,将其规范化处理后可得式(1-15)。
(1-15)(1-16)其中,,,(1-17),是输出误差信号,分别表示比例、积分、微分的学习速率。
单神经元PID控制器研究及仿真
第3期(总第154期)2009年6月机械工程与自动化M ECHAN I CAL EN G I N EER I N G & AU TOM A T I ON N o 13Jun 1文章编号:167226413(2009)0320069202单神经元P I D 控制器研究及仿真张世韬,杨 风,郝 骞(中北大学信息与通信工程学院,山西 太原 030051)摘要:基于单神经元P I D 控制算法,通过修改神经元控制连接加权系数和合理选择神经元系数,构成P I D 控制器,在此基础上建立单神经元P I D 控制器的Si m ulink 仿真模型,并给出仿真实例。
关键词:单神经元;P I D 控制器;Si m ulink 仿真中图分类号:T P 273 文献标识码:A收稿日期:2008210217;修回日期:2008212222作者简介:张世韬(19842),男,山西临汾人,在读硕士研究生。
0 引言传统的P I D 调节器由于其技术成熟,在过程控制中获得了广泛的应用,但对一些复杂过程、参数时变系统,由于P I D 的参数不易实时在线调整,在应用中影响系统的控制品质。
神经元作为构成神经网络的基本单位,具有自学习和自适应能力,由它构成的控制系统算法简单,易于实现,能够适应环境的变化,有较强的鲁棒性,可实时控制。
最显著的一点是不需要对被控对象进行精确的辨识,不需要知道被控对象的结构和参数,即单神经元控制器的设计无需系统建模。
单神经元的这些特点使它越来越多地引起人们的注意,并开始得到应用。
1 单神经元P I D 控制算法及其控制器111 单神经元学习算法单神经元学习算法就是调整连接权值W i 的规则,它是单神经元控制器的核心,并反映了其学习的能力。
学习算法如下:W i (k +1)=W i (k )+Γr i (k )。
(1)………………其中:r i (k )为随过程递减的学习信号;Γ为学习速率,Γ>0。
基于改进单神经元的四旋翼PID控制器设计
基于改进单神经元的四旋翼PID控制器设计姚乐;管业鹏;金星【期刊名称】《计算机测量与控制》【年(卷),期】2016(24)4【摘要】针对传统PID控制算法对四旋翼飞行器的姿态角进行控制时,其控制参数很难随着环境的变化进行自整定,进而影响四旋翼飞行器的稳定性的问题,提出了一种改进的PID控制算法;该算法通过改进单神经元中的K值公式提高了Kp、Ki、Kd的学习速率,从而提高了系统的响应速度;通过增加超调惩罚措施,通过适当的放大或缩小超调,可以使系统超调达到最小;通过与增量型PID、标准二次型单神经元PID算法进行比较,并且进行仿真实验;结果表明:所提方法具有参数自整定能力强且快速响应、鲁棒性强及稳定性好.【总页数】3页(P68-70)【作者】姚乐;管业鹏;金星【作者单位】上海大学通信与信息工程学院,上海200444;中国科学院上海微系统所与信息技术研究所,上海 200050;浙江中科领航汽车电子有限公司,杭州 311228;上海大学通信与信息工程学院,上海200444;中国科学院上海微系统所与信息技术研究所,上海 200050;浙江中科领航汽车电子有限公司,杭州 311228【正文语种】中文【中图分类】TP15【相关文献】1.基于改进型单神经元PID对四旋翼的控制研究 [J], 卢艳军;李晨杰;张晓东;2.基于改进型单神经元PID对四旋翼的控制研究 [J], 卢艳军;李晨杰;张晓东3.基于单神经元PID控制器的四旋翼飞行器航迹控制 [J], 罗林;李中志;;4.改进的四旋翼单神经元PID控制器 [J], 孙寅杰;周晓燕5.基于Delta学习规则的改进型单神经元自适应PID控制器设计 [J], 于蒙;邹志云;赵丹丹;郭宇晴因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
收稿日期:2018-05-21 作者简介:闻 新(1961-),男,辽宁沈阳人,教授,博士生导师,博士,主要研究方向:航天器控制,航天器总体设计,Email:wen_
xin2004@126com。
Hale Waihona Puke 第 4期闻 新,等:基于单神经元 PID控制的双旋翼实验平台系统研究
37
和 PID控制器三者结合起来,得出一种改进的神 经网络复杂 PID控制方法,并将其应用到多自由 度机器人控制系统中进行仿真,降低了系统的稳 态误差,优化了系统的动态过程。常静[4]基于 BP 神经网络优化算法,设计了一种新型的船舶模糊 PID自动舵,与传统自动舵相比提高了自动舵的 控制精度、应变性能和可靠性。程启明[5]等将基 于模糊径向基函数的神经网络 PID控制应用到 球磨机中并进行仿真,表明模糊径向基神经网络 能够有效地解决球磨机的复杂控制问题。扈宏 杰[6]等提出了一种基于 RBF神经网络的、结构简 单的、稳定的 PID直接自适应控制方法,并对位 置随动系统进行仿真,得出该方法的鲁棒性和跟 踪性能均优于经典 PID方法的结论。龙晓林[7] 等提出一种基于优化 BP神经网络结构的 PID控 制器,采用优化的 BP算法可以避免神经网络陷 入局部极小点,并且加快了网络的训练速度。王 春晨[8]等将 BP神经网络 PID控制应用到气体混 合配比系统中进行仿真实验,证明控制器在气体 混合配比系 统 中 具 有 良 好 的 控 制 性 能。李 卓[9] 等提出一种基于 BP神经网络的模糊自适应 PID 控制器并进行仿真实验,证明该控制器对模型、环 境具有 较 好 的 适 应 能 力 和 较 强 的 鲁 棒 性。屈 毅[10]等针对 大 滞 后、大 惯 性 的 温 室 温 度 控 制 系 统,采用 RBF神经网络与常规 PID控制系统结合 构成的 控 制 策 略,实 现 了 更 好 的 控 制 效 果。丁 军 [11]等人针对 制 药 厂 发 酵 罐 温 度 控 制 回 路 的 大 滞后、大惯性的特性,采用可调参数少、易于整定、 控制输出平稳的单神经元网络 PID控制,在实际 生产中取得了良好的效果。
文章编号:2095-1248(2018)04-0036-09
基于单神经元 PID控制的双旋翼实验平台系统研究
闻 新1,陈 镝1,乔 羽2
(1沈阳航空航天大学 航空宇航学院,沈阳 110136;2燕山大学 经济管理学院,河北 秦皇岛 066004)
摘要:将 Delta学习规则应用到单神经网络 PID控制中并验证其稳定性,然后建立双旋翼实验平 台的数学模型。在 Matlab环境下,运用两种不同的控制———传统 PID控制和单神经网络 PID控 制,对双旋翼实验平台系统进行单位阶跃响应和正弦信号响应仿真实验。通过比较仿真结果得出 单神经网络 PID控制比传统 PID控制反应更快速,电机的能耗更低,具有更好的控制性能。 关键词:单神经元控制;PID控制;双旋翼;matlab仿真 中图分类号:TP273+5 文献标志码:A doi:10.3969/j.issn.2095-1248.2018.04.003
Abstract:ApplytheDeltalearningruletothesingleneuralnetworkPID controlandverifyitsstability, thenestablishthemathematicalmodelofthetwinrotorexperimentalplatformUsetwokindsofcontrol,tradi tionalPID controlandsingleneuralnetworkPID control,todotheunitstepresponsecontroltestandsinu soidalsignalresponsecontrolofdualrotorsystem experimentalplatform underthesameconditioninthe conditionofMatlabThesimulationresultsshow thatsingleneuralnetworkPID controlcanreactmore quicklythantraditionalPIDcontrol,andthemotorhaslowerenergyconsumptionandbettercontrolperform ance.
Keywords:singleneuroncontrol;PID control;dualrotor;matlabsimulation
传统 PID是一种比较实用的线性控制,具有 结构简单、参数意义明确、易于实现等优点,现在 仍是工业过程控制中最常用的控制器。但是传统 PID很难实现参数的实时调整,对被控对象有很 强的依赖性,而且现实中参数时变系统或非线性 系统越来越多,控制对象越来越复杂,传统 PID
随着智能控制的发展,像模糊 PID、遗传算法 PID等智能 PID控制方法不断出现,并逐渐成为 现阶段直升机发动机控制、姿态控制、悬停控制等 领域的重要控制方法[12-13]。因此,本文采用单神 经元控制与 PID控制相结合得到的单神经网络 PID控制,通过对双旋翼实验平台进行控制实验, 与传统 PID进行结果比较来研究单神经网络 PID 的实际控制性能。单神经网络相对上述神经网络 PID来说比较简单。单神经网络 PID控制中神经 元的权值与 PID控制的参数一一对应,以 PID控 制的三个参数的偏差为神经元输入,利用自适应
很难满足系 统 要 求[1]。神 经 网 络 具 有 很 强 的 学 习记忆与自适应能力,可以处理难以描述的复杂 问题,将神经网络和 PID结合在一起能够弥补传 统 PID的不足之处[2]。所以近几年来神经网络 PID逐渐取代传统 PID,已广泛应用到各个领域。 袁静[3]等将基本 BP神经网络算法、粒子群算法
Researchondoublerotorexperimentalplatform system basedonsingleneuronPID control
WEN Xin1,CHEN Di1,QIAO Yu2
(1CollegeofAerospaceEngineering,ShenyangAerospaceUniversity,Shenyang110136,China; 2SchoolofEconomicsandManagement,YanshanUniversity,HebeiQinhuangdao066004,China)