自动控制根轨迹课程设计精髓版
自动控制原理之根轨迹

2 G(s)H(s)=k(2s+1)/s(s+5)
写出根轨迹方程,求出对应的零点和极点。
k(2s +1)
1+
= 0,
s(s + 5)
系统2: 零点:-0.5 极点为0, -5 Kg=2k
1+ 2k(s + 0.5) = 0 s(s + 5)
第四章 线性系统的根轨迹法
4.2 根轨迹的绘制法则
【 根轨迹性质 1】 根轨迹是连续的 【 根轨迹性质 2】 根轨迹关于实轴是对称的
4
将特征根画在 s平面上
s1 -0.005 -0.4 -1 -1+j1.73 -1+j3.87
s2 -1.995 -1.6 -1 -1-j1.73 -1-j3.87
将特征根随增益的变化在s平 面上轨迹称为根轨迹
K=2 K=0.1 k=1
-2j
j k=0.1
-2
-1
0
-j
-2j
第四章 线性系统的根轨迹法
2个无穷远的零点
同理,对于 G(s)H (s) = k(s +1)(s + 2) s
1个无穷远的极点
第四章 线性系统的根轨迹法
【法则一】根轨迹的渐近线
根轨迹的渐近线限定了当根轨迹趋向于无穷远时,根轨 迹的走向与形状。即根轨迹沿一组渐近线趋向于无穷远
处的开环零点。
与正实轴的夹角记为 φa
2k +1 φa = n − m π (k = 0,1,..., n − m −1)
3
d1,2 =
2×3
= −1± 3
d1,2=-1.577,-0.422
d1 d2 是否均为分离点吗?
自动控制原理简明版根轨迹法ppt课件

n1
i1 s zi j1 s pi
8
仍以上例说明: R(s)
K1(s 2)
C(s)
s2 2s 2
因为
1 1 1
s2 s1 j s1 j
消去分母 s2 4s 2 0
解上式得到 s1 0.586(舍去) s2 3.414
经检验,s2是根轨迹在实轴上的分离点。 对于采用上述三种方法,所得结果完全一致。由于后面
n
pi / n
j1
18
当K1变化时,极点的重心 保持不变。所以,为了平衡
“重心”的位置,当一部分根 轨
迹随着的增加向左方移动时,
另一部分根轨迹将向右方移动.
例
G(s)H(s)
K1
s(s P2 )( s P3 )( s P4 )
Im p4
p2 p3
0 p1 Re
19
10. 根轨迹上K1值的计算
(2)由劳斯阵列求得(及K1响应的值);
9 走向
当 n m 2, K1 时 , 一些轨迹向右,则另一些将向左。
令 dK1 0
ds
s2 2s 2 K1 s 2 s2 4s 2 0
求得 s1 0.586 (舍去)
s2 3.414
C(s)
7
(2)
m 1
n1
i1 s zi j1 s pi
因为
P(s)Q(s) P(s)Q(s) 0
即
P(s) Q(s) P(s) Q(s)
d [ln P(s)] d [lnQ(s)]
d[G1(s)H1(s)] 0或 dK1 0
ds
ds
7 出射角
入射角
复极点处的出射角:
m
n
a 180 (2k 1) i j
根轨迹法(自动控制原理)ppt课件精选全文完整版

课程:自动控制原理
第4章 根轨迹法
➢ 以K为参变量的根轨迹上的每一点都必须满足以上方程, 相应地,称之为‘典型根轨迹方程’。
也可以写成
m
n
(s zl ) K (s pi ) 0
可见,根轨迹可以清晰地描绘闭环极点与开环增益K之间的 关系。
课程:自动控制原理
第4章 根轨迹法
2.根轨迹的基本条件
❖ 考察图示系统,其闭环传递函数为:
Y(s) G(s) R(s) 1 G(s)H(s)
闭环特征方程为:
1 G(s)H(s) 0
➢ 因为根轨迹上的每一点s都是闭环特征方程的根,所以根轨 迹上的每一点都应满足:
l 1
i 1
对应的幅值条件为:
相角条件为:
n
( s pi ) K i1
m
(s zl )
l 1
m
n
(s zl ) (s pi ) (2k 1)180
k 1,2,
l 1
i 1
课程:自动控制原理
第4章 根轨迹法
❖ 上述相角条件,即为绘制根轨迹图的依据。具体绘制方法 是:在复平面上选足够多的试验点,对每一个试验点检查 它是否满足相角条件,如果是则该点在根轨迹上,如果不 是则该点不在根轨迹上,最后将在根轨迹上的试验点连接 就得到根轨迹图。
显然,位于实轴上的两个相邻的开环极点之间一定有分离 点,因为任何一条根轨迹不可能开始于一个开环极点终止 于另一个开环极点。同理,位于实轴上的两个相邻的开环 零点之间也一定有分离点。
课程:自动控制原理
第4章 根轨迹法
根轨迹法的课程设计

根轨迹法的课程设计一、课程目标知识目标:1. 让学生掌握根轨迹法的概念、原理和应用范围;2. 使学生理解根轨迹法在系统稳定性分析中的重要性;3. 引导学生运用根轨迹法分析控制系统性能,并能绘制根轨迹图;4. 帮助学生掌握根据根轨迹图判断系统稳定性的方法。
技能目标:1. 培养学生运用根轨迹法分析实际控制系统的能力;2. 提高学生绘制根轨迹图、判断系统稳定性的技巧;3. 培养学生运用数学软件(如MATLAB)辅助根轨迹分析的能力。
情感态度价值观目标:1. 培养学生对自动控制理论的学习兴趣,激发学生探索科学问题的热情;2. 培养学生团队合作精神,学会倾听他人意见,尊重他人成果;3. 增强学生面对复杂问题时的分析、解决问题的信心,培养勇于克服困难的品质。
课程性质:本课程为自动控制理论课程的一部分,旨在帮助学生掌握根轨迹法这一重要的稳定性分析方法。
学生特点:学生已具备一定的控制系统基础知识,具有一定的数学基础和分析能力。
教学要求:结合学生特点和课程性质,将课程目标分解为具体的学习成果,通过理论讲解、案例分析、上机实践等教学手段,使学生在理解根轨迹法的基础上,能够将其应用于实际控制系统的分析。
同时,注重培养学生的实际操作能力和团队合作精神,提高学生的综合素质。
二、教学内容1. 引入根轨迹法的基本概念,阐述其在控制系统稳定性分析中的作用;2. 讲解根轨迹法的原理,包括根轨迹的定义、绘制方法及其与系统稳定性的关系;3. 介绍根轨迹图的绘制步骤,结合教材实例进行分析;- 确定系统的开环传递函数;- 求解开环极点、零点;- 应用根轨迹规则,绘制根轨迹图;- 分析根轨迹图与系统稳定性的关系。
4. 分析不同控制系统参数变化对根轨迹的影响,探讨参数变化对系统稳定性的影响;5. 介绍利用根轨迹法进行控制系统性能优化,包括调整系统参数以改善稳定性;6. 结合实际案例,运用根轨迹法进行控制系统分析,提高学生解决实际问题的能力;7. 使用数学软件(如MATLAB)辅助根轨迹分析,让学生掌握相关软件操作技巧。
自动控制 根轨迹
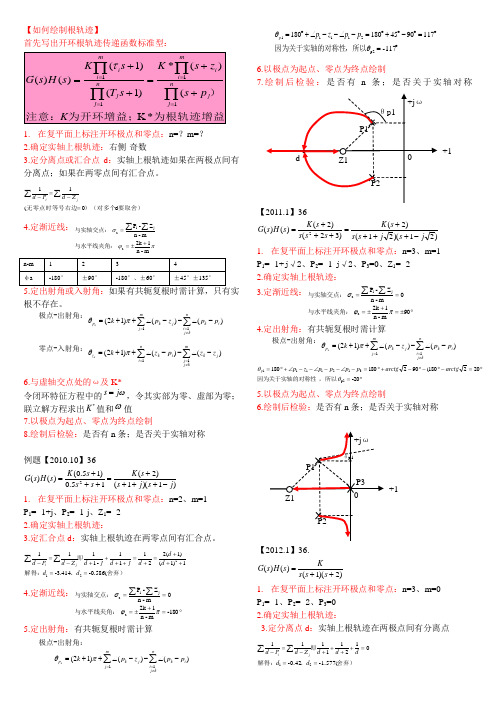
【如何绘制根轨迹】首先写出开环根轨迹传递函数标准型:1.在复平面上标注开环极点和零点:n=?m=?2.确定实轴上根轨迹:右侧-奇数3.定分离点或汇合点d :实轴上根轨迹如果在两极点间有分离点;如果在两零点间有汇合点。
要取舍))(对多个无零点时等号右边d 0(11=-=-∑∑jiZd P d4.定渐近线:πϕσm-n 12k m -n Z -P a jia +±==∑∑与水平线夹角:与实轴交点:根不存在。
极点-出射角:11(21)()()k mnp kj kij i j kk pz pp θπ==≠=++∠--∠-∑∑ 零点-入射角:11(21)()()k n mz ki kj i j j kk zp zz θπ==≠=++∠--∠-∑∑6.与虚轴交点处的ω及K*令闭环特征方程中的s j ω=,令其实部为零、虚部为零;联立解方程求出*K 值和ω值 7.以极点为起点、零点为终点绘制8.绘制后检验:是否有n 条;是否关于实轴对称例题【2010.10】36)1)(1()2(15.0)15.0()()(2j s j s s K s s s K s H s G -++++=+++=1.在复平面上标注开环极点和零点:n=2、m=1 P 1= -1+j 、P 2= -1-j 、Z 1= -22.确定实轴上根轨迹:3.定汇合点d :实轴上根轨迹在两零点间有汇合点。
舍弃)、解得:即(586.0-414.3-1)1()1(22111-1111212==+++=+=++++-=-∑∑d d d d d jd jd Zd Pd ji4.定渐近线:︒=+±===∑∑-180m-n 12k 0m -n Z-P a jia πϕσ与水平线夹角:与实轴交点:5.定出射角:有共轭复根时需计算极点-出射角:11(21)()()k mnp kj ki j i j kk pz pp θπ==≠=++∠--∠-∑∑︒=︒=︒-︒+︒=-∠--∠+︒=-1171179045180180p221111θθ,所以因为关于实轴的对称性p p z p p6.以极点为起点、零点为终点绘制7.绘制后检验:是否有n 条;是否关于实轴对称【2011.1】36)21)(21()2()32()2()()(2j s j s s s K s s s s K s H s G -++++=+++=1.在复平面上标注开环极点和零点:n=3、m=1 P 1= -1+j √2、P 2= -1-j √2、P 3=0、Z 1= -2 2.确定实轴上根轨迹: 3.定渐近线:︒±=+±===∑∑90m-n 12k 0m -n Z-P a jia πϕσ与水平线夹角:与实轴交点:4.定出射角:有共轭复根时需计算极点-出射角:11(21)()()k m np k j ki j i j kk p z pp θπ==≠=++∠--∠-∑∑︒=︒=-︒-︒-+︒=-∠--∠--∠+︒=-20202180(902180180p23121111θθ,所以因为关于实轴的对称性arctg arctg p p p p z p p 5.以极点为起点、零点为终点绘制6.绘制后检验:是否有n 条;是否关于实轴对称【2012.1】36.)2)(1()()(++=s s s K s H s G1.在复平面上标注开环极点和零点:n=3、m=0 P 1= -1、P 2= -2、P 3=0 2.确定实轴上根轨迹:3.定分离点d :实轴上根轨迹在两极点间有分离点舍弃)、解得:即-1.577(-0.420121111121===++++-=-∑∑d d dd d ZdP dji+1+14.定渐近线:︒±︒=+±===∑∑60/-180m-n 12k -1m -n Z-P a jia πϕσ与水平线夹角:与实轴交点:5.与虚轴交点处的ω及K*令闭环特征方程中的s j ω=,令其实部为零、虚部为零;联立解方程求出*K 值和ω值6/223K 0-2j 3-K 220)2)(1(323223=⇒±=⇒===+=+++==+++K s rad j s K s s s K s s s ωωωωωωωω、)()即(令6.以极点为起点、零点为终点绘制7.绘制后检验:是否有n 条;是否关于实轴对称+1。
自动控制原理根轨迹法

21
二、根轨迹绘制的基本法则(4)
法则2
根轨迹的分支数和对称性 根轨迹的分支数与开环极点数n相等(n>m),或与开
环有限零点数m相等(n<m)。 根轨迹连续:根轨迹增益是连续变化导致特征根也连
续变化。 实轴对称:特征方程的系数为实数,特征根必为实数
或共轭复数。
22
二、根轨迹绘制的基本法则(5)
法则3
s(s 2.5)( s 0.5 j1.5)( s 0.5 j1.5)
试绘制该系统概略根轨迹。
解:将开环零、极点画在后面图中。按如下典型步骤
1)确定实轴上的根轨迹。本例实轴上区域
和
为轨迹。
0,-1.5
2)确定-根2.轨5,迹-的渐 近线。本例n=4,m=3,故只有
一条 的渐近线。 180
36
K均* 有关。
15
一、 根轨迹法的基本概念(13)
4 -1- 4 根轨迹方程
1、系统闭环特征方程
由闭环传函可得系统闭环特征方程为:
(s)
G(s)
1 G(s)H(s)
1 G(s)H (s) 0
2 、根轨迹方程
当系统有m个开环零点和n个开环极点时,下式称为
根轨迹方程
m
(s z j )
K * j1 n
i 1
j 1
n
n
n
(s si ) sn ( si )sn1 ... (si ) 0
i 1
i 1
i 1
式中,s i 为闭环特征根。
31
二、根轨迹绘制的基本法则(14)
当n m 2 时,特征方程第二项系数与K * 无关,无
论 K * 取何值,开环n个极点之和总是等于闭环特征方程n
自动控制原理第四章根轨迹法

第四章 根轨迹法
第一节 根轨迹与根轨迹方程 根轨迹 系统的某个参数(如开环增益K)由0到∞变化时, 闭环特征根在S平面上运动的轨迹。
例: GK(S)= K/[S(0.5S+1)] = 2K/[S(S+2)] GB(S)= 2K/(S2+2S+2K) 特征方程:S2+2S+2K = 0
-P1)(S-P2)…(S-Pn)
单击此处可添加副标题
当n>m时,只有m条根轨迹趋向于开环零点,还有(n-m)条? m,S→∞,有: (S-Z1)(S-Z2)…(S-Zm) -1 -1 ———————-— = —— = —— P1)(S-P2)…(S-Pn) K* AK 可写成:左边 = 1/Sn-m = 0 当K=∞时,右边 = 0 K=∞(终点)对应于S→∞(趋向无穷远). 即:有(n-m)条根轨迹终止于无穷远。
分解为:
03
例:GK(S)= K/[S(0.05S+1)(0.05S2+0.2S+1)] 试绘制根轨迹。 解: 化成标准形式: GK(S)= 400K/[S(S+20)(S2+4S+20)] = K*/[S(S+20)(S+2+j4)(S+2-j4)] K*=400K——根迹增益 P1=0,P2=-20,P3=-2+j4,P4=-2-j4 n=4,m=0
一点σa。
σa= Zi= Pi
ΣPi-ΣZi = (n-m)σa
σa= (ΣPi-ΣZi)/(n-m)
绘制根轨迹的基本法则
K*(S-Z1)(S-Z2)…(S-Zm)
—————————— = -1 (S-P1)(S-P2)…(S-Pn)
《自动控制原理》第4章 线性系统的根轨迹法
68
4.5 广义根轨迹
根轨迹部分是个半圆,半径是 k *
证明:根轨迹上一点S满足相角条件
s (s j2) (s j2)
代入s j
( j) ( j( 2)) ( j( 2))
arctan arctan 2 arctan 2
K* G(s)
s(s 2)(s 1)
26
法则五:根轨迹的分离点与分离角
分离点:几条根轨迹在[s]某一点相遇后又分开 的点。
说明有重根
27
实轴上的分离点(常见)
如果根轨迹位于实轴上相邻的两个开环极点之间, 其中一个可以是无限极点,则在这两个极点之间至 少存在一个分离点;
如果根轨迹位于实轴上相邻的两个开环零点之间, 其中一个可以是无限零点,则在这两个零点之间至 少存在一个分离点;
开环极点:
p1 0 p2 0 p3 2 p4 5
(2)实轴上的根轨迹 (3)根轨迹分支数
4
59
G0 ( s)
s2(s
k* 2)(s
5)
(4)渐近线
4条
渐近线与实轴的夹角
a
4
3
4
3
4
4
渐近线与实轴的交点(σa , 0)
4
pi
a
i 1
4
1.75
60
G0 ( s)
s2(s
k* 2)(s
法则二:根轨迹的分支数,对称性和 连续性
• 根轨迹的分支数与开环有限零点数m和有限 极点数n中的大者相等,它们是连续的并且 对称于实轴。
22
法则三:根轨迹的渐近线(n>m)
• 当开环有限零点数m小于有限极点数n时, 有n-m条根轨迹分支沿着与实轴交点 ,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
西安石油大学
课程设计
电子工程学院自动化专业 1203班题目根轨迹法校正的设计
学生郭新兴
指导老师陈延军
二○一四年十二月
目录
1. 任务书.........................................1 2.设计思想及内容.................................2 3.编制的程序.....................................2 3.1运用MATLAB编程............................ 2
3.2由期望极点位置确定校正器传递函数...........4
3.3 校正后的系统传递函数.......................5 4.结论...........................................7 5.设计总结.......................................8 6.参考文献.......................................8
《自动控制理论》课程设计任务书
2.设计内容及思想 :
1) 内容:已知单位负反馈系统被控对象传递函数为:
)
25(2500
)(0
0+=s s K s G ,试用根轨迹几何设计法对系统进行滞后串联校正
设计,使之满足:
(1)阶跃响应的超调量:σ%≤15%; (2)阶跃响应的调节时间:t s ≤0.3s ; (3)单位斜坡响应稳态误差:e ss ≤0.01。
2)思想: 首先绘出未校正系统得bode 图与频域性能,然后利用MATLAB 的SISOTOOL 软件包得到系统的根轨迹图,对系统进行校正,分析系统未校正前的参数,再按题目要求对系统进行校正,计算出相关参数。
最后观察曲线跟题目相关要求对比看是否满足要求,并判断系统校正前后的差异。
3 编制的程序: 3.1运用MATLAB 编程:
根据自动控制理论,对
I
型系统的公式可以求出静态误差系数
K 0=1。
再根据要求编写未校正以前的程序 %MATLAB PROGRAM L1.m
K=1; %由稳态误差求得; n1=2500;d1=conv([1 0],[1 25]); %分母用conv 表示卷积;
s1=tf(K*n1,d1); %生成系统开环传递函数;sisotool(s1); %得到开环根轨迹图和Bode图figure(2);sys=feedback(s1,1);step(sys) %系统阶跃响应图
程序运行后,可得到如图1-1所示由sisotool设计画面得到的未校正的系统的开环根轨迹图和Bode图和如图2未校正的系统的单位阶跃响应曲线。
图1由sisotool得到的未校正的系统的开环根轨迹图和Bode图
图2未校正系统的阶跃响应曲线
阶跃响应的超调量:σ%=44%;
阶跃响应的调节时间:t s=0.32s;
由以上图像知道不满足题目要求。
3.2由期望极点位置确定校正器传递函数。
求校正需确定闭环主导极点S1的位置。
回执未校正系统的根轨迹,轨迹无零点,有两个极点:P1=0,P2=-25. n1=2500;
d1=conv([1 0],[1 25]);
s1=tf(n1,d1);
rlocus(s1)
用以下程序可以求出校正装置的传递函数: clear
essv=0.01;x=-12.5;z1=0;p1=0;p2=25; zeta=0.54;acos(zeta);ta=tan(acos(zeta)); y1=x*ta;y=abs(y1);s1=x+y*i; Kr=abs(s1+p1)*abs(s1+p2); K=Kr/(p1+p2);K0=1/essv;
beta=K0/K;T=1/((1/20)*abs (x )); betat=beta*T;
gc=tf((1/beta)*[1 1/T][1 1/betat]) 再次通过sisotool 设计工具
实现对原系统的校正。
使
得本设计的校正装置的开环传递函数为10049.01
02.0)(++=
s s s G c ,满足指标
要求。
3.3校正后的系统传递函数
对校正后系统的稳定的并且包括校正装置的系统传递函数为
1
0049.01
02.0)25(2500)()(0
+++=
s s s s s s c
G G
根据校正后的结构与参数,编写绘制Bode 图的程序L3.m % MATLAB PROGAM L3.m clear
k=1;
n1=2500;d1=conv([1 0],[1 25]);
s1=tf(k*n1,d1); %生成系统开环传递函数;
n2=[0.02 1];d2=[0.0049 1];
s2=tf(n2,d2);
sop=s1*s2;
sisotool(sop); %利用sisotool得到开环根轨迹图和Bode图figure(2);sys=feedback(sop,1);step(sys)
程序运行后,可得到如图3所示由sisotool设计得到的校正的系统的开环根轨迹图和Bode图和如图4校正后的系统的单位阶跃响应曲线。
图3由sisotool得到的校正后的系统的开环根轨迹图和Bode图
图4 校正后的系统的单位阶跃响应曲线
4.结论:
通过用MATLAB对该题进行滞后串联校正的解析,求得校正前各项参数:
阶跃响应的超调量:σ%=44%;
阶跃响应的调节时间:t s=0.32s;
单位斜坡响应稳态误差:e ss≤0.01;
校正后各项参数:
阶跃响应的超调量:σ%=13%≤15%;
阶跃响应的调节时间:t s=0.09≤0.3s;
单位斜坡响应稳态误差:e ss≤0.01。
校正前系统不稳定,各参数不符合要求,校正后各参数系统稳定,并且各参数符合题目要求。
校正后系统稳定性提高。
5.设计总结:
本次课程设计的整个过程中有遇到了些许困难。
首先是对课程内容了解不深入,尤其是滞后串联校正。
拿到设计题目后分析不到位,反复几次才找到正确的方法。
另外在对MATLAB运用中遇到许多问题,对该软件并不熟悉程度不够,只能通过摸索学会简单的应用。
同时收获颇多,深刻体会到用MATLAB这个强大的数学工具来解决一些算法和仿真的问题的方便,并精确地反映系统的阶跃响应,还能通过图形和数据一起分析。
与此同时也通过此次设计学习更深入了解了校正的过程,而不在像以前局限于理论计算。
6.参考文献:
[1]《自动控制理论》课程设计指导书薛朝妹霍爱清西安石油大学。
[2]《自动控制理论》教材汤楠霍爱清石油工业出版社。
[3]《MATLAB从入门到精通》周建兴岂兴明等编著人民邮电出版社。
[4]《控制系统MATLAB计算与仿真》黄忠霖黄京编著国防工业出版社。