S120 简单抱闸控制
S120 抱闸控制说明

精心整理1简单抱闸控制特点S120抱闸控制主要分为简单抱闸控制和扩展抱闸控制,可根据应用场合不同而灵活选用。
本文主要介绍简单抱闸控制。
S120简单抱闸控制的特点主要有:?通过顺序控制自动激活?静态P1227(零速P1228)检测监控?强制释放抱闸(p0855,p1215),包括有条件或无条件释放抱闸?无条件关闭抱闸(p0858=1)?取消“使能速度控制器”信号后的抱闸应用(p0856=0)2抱闸功能描述“简单抱闸控制”专门用于电机抱闸的控制。
当驱动不激活时,保持抱闸用于保护驱动装置,以免出现不希望的运动,如位能性的负载或垂直运行的负载出现的危险。
释放和保持抱闸的触发命令通过控制单元(CU)的DRIVE-CLiQ传送至电机模块,直接把信号互连到电机模块上并进行监控。
然后电机模块执行动作并激活保持抱闸的输出。
可在SINAMICSS120/S150参数手册(功能图2701,2704)中看到详细的顺序控制框图。
通过参数p1215可配置抱闸控制的运行规则,图1所示为简单抱闸控制的顺序图。
打开抱闸的过程:(1)当符合启动条件后,控制单元发出ON命令,接触器开始闭合,设备开始预充电。
完成后,开始建立励磁;(2)励磁完成后,打开抱闸的输出信号为1;(3)此处还可以通过p0855=1强迫释放抱闸命令;(4)打开抱闸的输出信号为1,r0899.12=1,可以控制抱闸装置。
此时电机并不会立即加速,否则会出现溜钩的现象;(5)延迟时间p1216到达之后,电机立即加速,直到稳定状态。
p1216的时间需根据现场情况调节。
关闭抱闸的过程:(1)当控制单元发出OFF命令后,电机速度开始下降;(2)电机实际速度或设定速度小于p1226所设定的值;(3)延迟p1227或p1228时间后,关闭抱闸的输出信号为1;(4)此处还可以通过p0858=1强迫输出关闭抱闸命令;(5)关闭抱闸的输出信号为1,r0899.13=1,可以控制抱闸装置。
S120常见故障处理
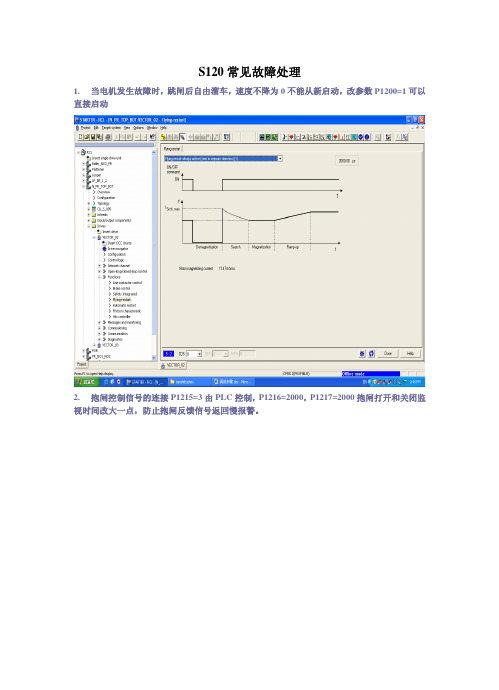
S120常见故障处理1.当电机发生故障时,跳闸后自由溜车,速度不降为0不能从新启动,改参数P1200=1可以直接启动2.抱闸控制信号的连接P1215=3由PLC控制,P1216=2000,P1217=2000抱闸打开和关闭监视时间改大一点,防止抱闸反馈信号返回慢报警。
3.报(F7900)电机锁死故障,即有速度给定值,但实际值没有增长,转矩达到限幅值。
改参数:P2175 =2.03%改到1.53% 速度设定监视极限值P2177=10s 改到15s 故障延时时间分两种情况(p1300≥20或p1300<20)p1300 < 20 (V/f open-loop control):It is not possible to select rotating measurement or speed controller optimization.p1300 = 20, 22 (sensorless operation):Only rotating measurement or speed controller optimization can be selected in the sensorless mode.p1300 = 21, 23 (operation with encoder):Both versions (sensorless and with encoder) of the rotatingmeasurement and speed controller optimization can be selected.改参数:P1082 =110%改到115% 速度限幅值或者KP增大5.报(F07902)电机堵转故障,偏差大于设定值,转矩达到限幅值,经过延时后报故障。
改参数:P1745=20%改到25% 速度设定监视极限值P2178=10s 改到15s 故障延时时间6.报(A7903)堵转报警,即速度偏差大于设定值经过延时后报故障改参数:P2163 =20%改到30% 速度设定监视极限值P2166=200ms改到400ms 故障延时时间7.急停报F01611(F01600)F30611(F30600),检查急停继电器信号是否正常,并注意端子极性,Motor Module 和Control Unit 各封锁半个桥臂,并且两个信号在相同的延时后(CuP9650,MMP9850)同时收到,不然报故障,如果信号恢复后仍然不能复位,需重新上电。
实现S120主从控制的方案全解

实现S120主从控制的方案全解S120主从控制是指在工业自动化系统中,通过一个主控制器(Master controller)对多个从设备(Slave device)进行统一控制和管理的一种方案。
下面将详细介绍S120主从控制的实现方案。
一、硬件设备方案:1.主控制器:选取一台性能强大的工控机或PLC作为主控制器,用于控制和管理整个系统。
主控制器可以连接各种输入输出设备,如传感器、执行器、显示器等。
2.从设备:每个从设备都配备一个控制器或PLC,用于实现该设备的独立控制和运行。
从设备之间通过通信模块与主控制器进行数据交互。
从设备可以是各种执行器,如电机、驱动器等。
3.通信模块:主控制器和从设备之间需要通过可靠的通信方式进行数据传输和命令下发。
可以选择常用的通信方式,如以太网、RS485等。
通信模块需具备高速传输和可靠性强的特点。
4.IO模块:主控制器和从设备之间的数据交互需要经过输入输出模块。
IO模块负责将输入信号与输出信号进行转换和传输,通常具备多个输入输出端口,可以与各种传感器和执行器进行连接。
5.传感器和执行器:系统中的传感器用于采集各种环境参数和设备状态,执行器用于实现各种动作。
根据实际需求选择合适的传感器和执行器,并与IO模块进行连接。
二、软件方案:1.主控制软件:主控制器上的软件主要负责整个系统的调度和控制。
其功能包括:接收从设备发送的数据,对从设备进行控制和配置,分配任务给从设备,处理异常情况等。
主控制软件需要具备良好的实时性和稳定性。
2.从设备控制软件:每个从设备上的控制软件可以根据具体应用需求编写。
主要功能是接收主控制器发送的命令、读取传感器数据、控制执行器运动等。
从设备控制软件还可以实现一些本地的逻辑判断和控制。
3.数据库系统:为了对系统的运行状态进行数据记录和分析,可以采用数据库系统来存储各种运行数据。
数据库系统可以记录从设备的状态、传感器数据、报警信息、故障记录等,以便于后期的查询和分析。
电气抱闸的控制方法
一、抱闸结构和控制原理制动的方法一般有两类:机械制动和电气制动。
A、机械制动利用机械装置使电动机断开电源后迅速停转的方法叫机械制动。
常用的方法:电磁抱闸制动。
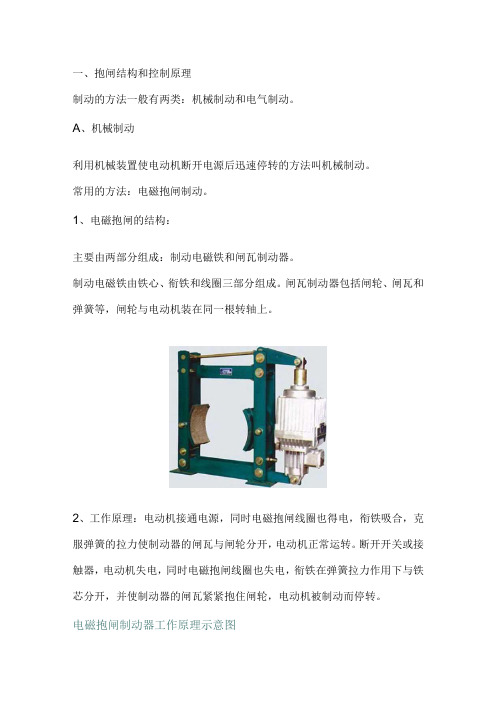
1、电磁抱闸的结构:主要由两部分组成:制动电磁铁和闸瓦制动器。
制动电磁铁由铁心、衔铁和线圈三部分组成。
闸瓦制动器包括闸轮、闸瓦和弹簧等,闸轮与电动机装在同一根转轴上。
2、工作原理:电动机接通电源,同时电磁抱闸线圈也得电,衔铁吸合,克服弹簧的拉力使制动器的闸瓦与闸轮分开,电动机正常运转。
断开开关或接触器,电动机失电,同时电磁抱闸线圈也失电,衔铁在弹簧拉力作用下与铁芯分开,并使制动器的闸瓦紧紧抱住闸轮,电动机被制动而停转。
电磁抱闸制动器工作原理示意图3、电磁抱闸制动的特点机械制动主要采用电磁抱闸、电磁离合器制动,两者都是利用电磁线圈通电后产生磁场,使静铁芯产生足够大的吸力吸合衔铁或动铁芯(电磁离合器的动铁芯被吸合,动、静摩擦片分开),克服弹簧的拉力而满足工作现场的要求。
电磁抱闸是靠闸瓦的摩擦片制动闸轮.电磁离合器是利用动、静摩擦片之间足够大的摩擦力使电动机断电后立即制动。
优点:电磁抱闸制动,制动力强,广泛应用在起重设备上。
它安全可靠,不会因突然断电而发生事故。
缺点:电磁抱闸体积较大,制动器磨损严重,快速制动时会产生振动。
4、电动机抱闸间隙的调整方法停机。
(机械和电气关闭确认、泄压并动力上锁,并悬挂“正在检修”、“严禁启动”警示牌。
)卸下扇叶罩;取下风扇卡簧,卸下扇叶片;检查制动器衬的剩余厚度(制动衬的最小厚度);检查防护盘:如果防护盘边缘已经碰到定位销标记时,必须更换制动器盘;调整制动器的空气间隙:将三个(四个)螺栓拧紧到空气间隙为零,再将螺栓反向拧松角度为120。
,用塞尺检查制动器的间隙(至少检查三个点),应该均匀且符合规定值;不对请重新调整;(注:抱闸的型号不同,其反向拧松的角度、制动器的间隙也不一样)。
手动运行,制动器动作声音清脆、停止位置准确、有效。
S120故障输出和抱闸设置
选择电流 门限值, 推荐设为 20%
选择延时时间
- 39 -
• 抱闸控制位输出设定
选择 DI/DO11 作为抱 闸输出点
- 40 -
- 41 -
. - -
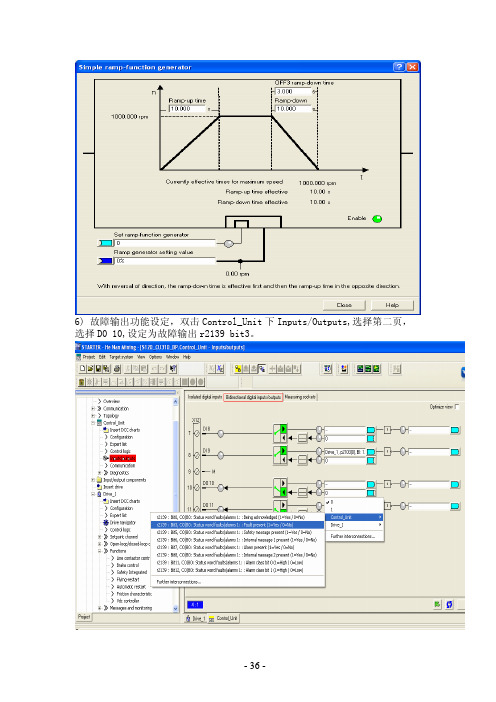
6) 故障输出功能设定,双击 Control_Unit 下 Inputs/Outputs,选择第二页, 选择 D0 10,设定为故障输出 r2139 bit3。
- 36 -
7) 抱闸控制功能设定,双击 Functions 下的 brake control,分别单击 Close brake 和 release brake.
7 ) 闭闸设定, 原则是当转速低于一定值的时候闭闸 • 单击 standstill detection
单击这里
选择实际转速 r63[0]
- 37 -
实际转速 关闸门限值
延时时间
• 选择故障信号接入闭闸信号
选择故障输 出信号
- 38 -
• 开闸设定,原则是当实际电流值高于一定值的时候开闸
选择实际电流 r68
应用探讨——S120抱闸控制探讨

应用探讨——S120抱闸控制探讨随着S120在工控行业的深入和广泛应用,工程师积累了许多关于调试方面的宝贵经验。
在这里我们将一起探讨一下电机抱闸的控制,希望大家踊跃发言,共同探讨应用案例,分享应用经验,一起解析使用中遇到的问题。
我们将从以下几个方面展开讨论:1、在抱闸装置的打开时间P1216内,装置处于STOP2状态,在此状态下,装置运行在什么状态。
STOP2状态应该是打开抱闸命令开始,经过1216时间结束。
关闭抱闸命令开始到脉冲关闭(P1217)。
在STOP2状态中,装置的ON信号存在,脉冲使能r899.11存在,运行使能信号=0,(r899.2),此时装置的电流和转矩(如果设定值通道强制为1,p1152=1)不受控。
---------------------------------------------------------------------------------------------------------------------------------------2、速度设定值使能,默认只有在抱闸打开后才释放,如果需要在抱闸打开前输出转矩如何设置,此处需要考虑STOP2状态。
---------------------------------------------------------------------------------------------------------------------------------------------将p1152改为1后可实现这一功能,可以方便地设置开闸电流门槛的大小。
从实际应用来讲,对于提升类负载,采用“在抱闸打开后再释放速度设定值使能”的方式,当向变频器发出启动信号后,在励磁过程已结束时打开抱闸(开闸电流门槛设置到略高于励磁电流,电机在励磁过程中的励磁电流是大于额定励磁电流的),吊重载时的使用情况也很正常。
如果采用将p1152改为1后,在抱闸打开前就输出转矩的设置,开闸输出转矩的大小要根据实际使用情况逐步调整到合理的值。
西门子S120变频器调试步骤
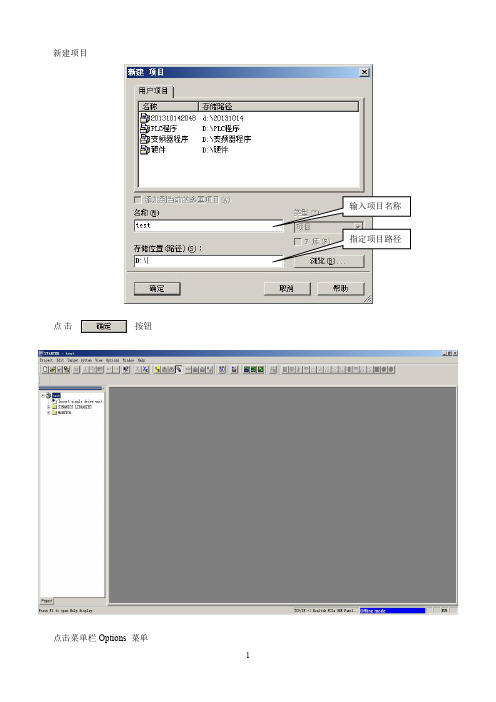
新建项目点击按钮点击菜单栏Options菜单输入项目名称指定项目路径点击设置PG/PC(使用USB编程电缆连接)点击按钮点击按钮,再次点击按钮,完成PG/PC 设置点击设置PG/PC(使用网线连接)点击按钮,完成PG/PC设置选择用于通讯的网卡点击这里点击上图标记(接口信息)按钮,弹出如下所示对话框(如显示?可能是软件版本低)勾选点击按钮点击上图标记(接口信息)按钮,弹出如下所示对话框(如显示?可能是软件版本低)勾选点击按钮待软件左侧显示如上图,点击按钮,点击上图标记(在线)按钮点击这里点击按钮点击上图标记(恢复出厂设置)按钮点击按钮系统会执行Copy Ram to Rom操作点击这里完成后,出现如下界面双击这里双击上图标记(自动组态)按钮点击按钮点击按钮,完成后出现如下界面点击按钮以下进行参数设置:注意这里第一步:右击这里第二步:单击这里单击OK 按钮第一步:双击这里第二步:选择组0的扫描时间注意:如果没有整流模块时,变频器启动信号直接连接到电机模块的P840;并将r20047连接到p852。
有整流模块时,也将r20047连接到p852。
选择组0第一步:双击这里正向信号连接或门输入端0反向信号连接或门输入端1故障复位变频器启动注意:这两个参数一定在做完电机辨识以后再设定禁止反向运行禁止正向运行第一步:单击这里变频运行注意箭头方向变频故障抱闸输出注意:抱闸输出要在下面设置好抱闸条件以后,才能设置,否则找不到参数r1229.1注意:TB30的设置与TM31的设置类似,只是TB30集成在CU 上,并且TB30只能选择-10V~10V 信号,但是可以在Scaling 里更改其适用范围。
第一步:双击这里选择就绪第一步:双击这里第二步:设置速度给定输入类型第三步:设置模拟量死区第四步:点击这里并根据实际情况设定最后点击这里设置信号输出类型设置信号输出类型频率电流点击这里并根据实际情况设定点击这里并根据实际情况设定第一步:双击这里第二步:单击这里矢量控制最后点击这里带编码器直接点击这里直接点击这里应用在重载场合最后点击这里普通旋转电机最后点击这里输入正确的电机参数最后点击这里直接点击这里直接点击这里选择电机辨识然后点击这里选择抱闸方式选择选择外部抱闸然后点击这里点击这里进行编码器设置编码器设置完成后点击这里编码器脉冲无零位标记四线AB 相编码器最后点击这里八线ABZ 反编码器注意电压静态和动态辨识最后点击这里直接点击这里检查与实际是否相符设置加减速时间最后点击这里直接点击这里双击这里选择就绪编码器故障导致无编码器运行,继续运行,报警或门输出端给变频器使能快速励磁双击这里点击这里设置关抱闸条件点击这里设置开抱闸条件第一步:点击这里第二步:设置关抱闸转速第三步:点击这里第四步:点击这里设置电流百分比设置开抱闸条件(电流)最后点击这里双击这里再点击这里反转信号上文提到的禁止正反向信号参数设置完成后,开始电机的静态动态辨识静态辨识:单击按钮1,变频器启动,电机不会转动,等待变频器自动停止后单击按钮0;动态辨识:静态辨识结束后单击按钮1,电机转动,等待变频器自动停止。
西门子S120书本型伺服驱动器如何使用STARTER进行快速调试
西门子S120书本型伺服驱动器如何使用STARTER进行快速调试使用 STARTER 进行调试(示例)下表中举例说明了使用调试工具 STARTER 进行调试的步骤。
列表: 使用调试工具 STARTER 进行调试的步骤(示例)做什么?如何做?注释1.创建新项目1.调用菜单“Project > New...”。
2.在对话框“New Project” 中输入项目名称。
3.点击“OK”。
-2.自动配置1.调用菜单“Project > Connect to selected target device”。
2.因为现在项目中无任何设备,调试工具 STARTER 提供查找可访问的接口。
3.点击“OK”。
4.勾选一台可访问的驱动设备。
5.点击“Accept”。
6.该驱动对象被传送到项目窗口中。
7.重新调用菜单“Project” > “Connect to selected target device”。
8.现在已和驱动设备在线连接。
9.双击“Automatic configuration”。
点击“Configuration”。
10.在自动调试期间,向导会为您提供可以选择的驱动对象类型。
所有组件都选择缺省设置“SERVO”。
11.点击“Create”。
12.在自动配置结束后,会提供转至离线或保持在线选项。
选择“GO OFFLINE ”。
-3.配置电源模块1.双击项目树形图中的“Infeeds”2.双击创建的电源模块3.点击黄色按钮“Wizard...”4.根据 3.2 检查自动设置并输入附加数据(如设备标识符等)。
-提示:由于在出厂设置中 p7826 = 1,因此在首次启动所配置的 DRIVE-CLiQ 组件时,固件会自动升级到存储卡上的固件版本。
该过程会持续几分钟。
与此同时该组件上 READY LED 以绿色/红色闪烁,控制单元上的 LED 以橙色闪烁(0.5 Hz)。
在所有升级结束后,控制单元上的READY LED 以橙色(2 Hz)闪烁,完成更新的组件的 READY LED 以绿色/红色闪烁(2 Hz)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
S120 简单抱闸控制
1 简单抱闸控制特点
S120抱闸控制主要分为简单抱闸控制和扩展抱闸控制,可根据应用场合不同而灵活选用。
本文主要介绍简单抱闸控制。
S120 简单抱闸控制的特点主要有:
•通过顺序控制自动激活
•静态P1227(零速P1228)检测监控
•强制释放抱闸(p0855,p1215),包括有条件或无条件释放抱闸
•无条件关闭抱闸(p0858 = 1)
•取消“使能速度控制器”信号后的抱闸应用(p0856 = 0)
2抱闸功能描述
“简单抱闸控制”专门用于电机抱闸的控制。
当驱动不激活时,保持抱闸用于保护驱动装置,以免出现不希望的运动,如位能性的负载或垂直运行的负载出现的危险。
释放和保持抱闸的触发命令通过控制单元(CU)的DRIVE-CLiQ 传送至电机模块,直接把信号互连到电机模块上并进行监控。
然后电机模块执行动作并激活保持抱闸的输出。
可在
SINAMICS S120/S150 参数手册(功能图2701,2704)中看到详细的顺序控制框图。
通过
参数p1215可配置抱闸控制的运行规则,图1所示为简单抱闸控制的顺序图。
打开抱闸的过程:
(1) 当符合启动条件后,控制单元发出ON命令,接触器开始闭合,设备开始预充电。
完
成后,开始建立励磁;
(2) 励磁完成后,打开抱闸的输出信号为1;
(3) 此处还可以通过p0855=1强迫释放抱闸命令;
(4) 打开抱闸的输出信号为1,r0899.12=1,可以控制抱闸装置。
此时电机并不会立即加
速,否则会出现溜钩的现象;
(5) 延迟时间p1216到达之后,电机立即加速,直到稳定状态。
p1216的时间需根据现
场情况调节。
关闭抱闸的过程:
(1) 当控制单元发出OFF命令后,电机速度开始下降;
(2) 电机实际速度或设定速度小于p1226所设定的值;
(3) 延迟p1227或p1228时间后,关闭抱闸的输出信号为1;
(4) 此处还可以通过p0858 = 1强迫输出关闭抱闸命令;
(5) 关闭抱闸的输出信号为1,r0899.13=1,可以控制抱闸装置。
此时变频器输出电流仍。