MATLAB--simulink-通信系统建模与仿真--第四章部分习题答案
SIMULINK仿真
后面的每一列对应每一个输入端口,矩阵的第一行表示某 一时刻各输入端口的输入状态。另外,也可以把矩阵分开 来表示,即MATLAB默认的表示方法[t,u],其中t是一维 时间列向量,表示仿真时间,u是和t长度相等的n维列向 量(n表示输入端口的数量),表示状态值。例如,在命 令窗口中定义t和u:
条件执行子系统分为
1.使能子系统
使能子系统表示子系统在由控制信号控制时,控制信号由 负变正时子系统开始执行,直到控制信号再次变为负时结 束。控制信号可以是标量也可以是向量。
建立使能子系统的方法是:打开Simulink模块库中的Ports & Subsystems模块库,将Enable模块复制到子系统模型 中,则系统的图标发生了变化。
阵、结构和包含时间的结构3种选择。“Limit data points to last”用来限定保存到工作空间中 的数据的最大长度。 输出选项(Output options)有: ① Refine output(细化输出) ② Produce additional output(产生附加输出) ③ Produce specified output only(仅在指定 的时刻产生输出)
4.1 初识Simulink—— 一个简单的仿 真实例
在MATLAB的命令窗口输入Simulink,或单击MATLAB主 窗口工具栏上的“Simulink”命令按钮即可启动Simulink。 Simulink启动后会显示如图4.1所示的Simulink模块库浏览 器(Simulink Library Browser)窗口。
U (s)
Kp
Ki s
Kd s
智慧树知到《数学建模与系统仿真》章节测试[完整]
![智慧树知到《数学建模与系统仿真》章节测试[完整]](https://img.taocdn.com/s3/m/20c3a6a4c850ad02df804155.png)
最新资料欢迎阅读智慧树知到《数学建模与系统仿真》章节测试[ 完好答案 ]智慧树知到《数学建模与系统仿真》章节测试答案第一章单元测试1、数学模型是对于现实世界的一个特定对象,一个特定目的,依据独有的内在规律,做出一些必需的假定,运用合适的数学工具,获取一个数学结构 .A:错B:对答案 : 【对】2、数学建模是利用数学方法解决实质问题的一种实践. 即经过抽象、简化、假定、引进变量等办理过程后,将实质问题用数学方式表达,成立起数学模型,而后运用先进的数学方法及计算机技术进行求解,是对实质问题的完好解答和真切反应,结果然切靠谱。
A:对B:错答案 : 【错】3、数学模型是用数学符号、数学公式、程序、图、表等刻画客观事物的实质属性与内在联系的理想化表述 . 数学建模就是成立数学模型的全过程 ( 包含表述、求解、解说、查验 ).A:对B:错答案 : 【对】4 、数学模型 (Mathematical Model): 重过程 ; 数学建模(Mathematical Modeling):重结果。
A:错B:对答案 : 【错】5、人口增添的Logistic模型,人口增添过程是先慢后快。
A:错B:对答案 : 【错】6、MATLAB的主要功能有A:符号计算B:画图功能C:与其余程序语言交互的接口D:数值计算答案: 【符号计算 ;画图功能 ;与其余程序语言交互的接口;数值计算】7、Mathematica的基本功能有A:语言功能 (Programing Language)B:符号运算 (Algebric Computation)C:数值运算 (Numeric Computation)D:图像办理 (Graphics )答案 : 【语言功能 (Programing Language);符号运算 (Algebric Computation);数值运算 (Numeric Computation);图像办理 (Graphics )】8、数值计算是以下哪些软件的一个主要功能A:MapleB:JavaC:MATLABD:Mathematica答案 : 【Maple;MATLAB;Mathematica】9、评阅数学建模论文的标准有:A:完好一致的结果B:表述的清楚性C:建模的创建性D:论文假定的合理性答案:【表述的清楚性 ;建模的创建性 ;论文假定的合理性】10、对于中国 ( 全国 ) 大学生数学建模比赛 (CUMCM)描绘正确的选项是A:2年举办一次B:一年举办一次C:开始于 70 年月初D:一年举办 2 次答案 : 【一年举办一次】第二章单元测试1、权衡一个模型的好坏在于它能否使用了高妙的数学方法。
详解MATLAB/SIMULINK 通信系统建模与仿真资料

本章内容
1.1 MATLAB简介 1.2 MATLAB程序设计 1.3 通信系统仿真
1.1 MATLAB简介
● 数值计算和符号计算功能 ● 具有很好的图形功能 ● 可以直接处理声言和图像文件 ● 具有功能强大的工具箱 ● 使用方便,具有很好的扩展功能 ● Simulink
1.2.2 MATLAB的帮助系统
● 查看命令或函数帮助 ● 联机帮助系统 ● PDF文件帮助系统 ● MATLAB网络资源
1.2.3 MATLAB的基本操作
数据类型
• (1)变量与赋值 • (2)变量的删除与修改 • (3)局部变量和全局变量
矩阵
• (1) 一般矩阵的生成 • (2)特殊矩阵的生成
1.2.5.5 用户参数交互输入
input函数用于向计算机输入一个参数 pause函数暂停程序的执行 disp函数是向命令窗口输出提示信息
1.2.6 文件操作
文件的打开与关闭
• fopen函数 、fclose函数
文件的读写操作
• fread 、fwrite 、fscanf 、fprintf
矩阵运算
1.2.4 MATLAB图形处理和数据可视化
plot函数
subplot函数 多图形窗口 hold命令 对数坐标图形
1.2.5 M文件编程
M脚本文件 函数文件 函数调用和参数传递 matlab的程序结构 用户参数交互输入
1.2.5.1 M脚本文件
1.2.5.4 matlab的程序结构
顺序结构 — 依次顺序执行程序的各条语句 循环结构 — 被重复执行的一组语句,循环是 计算机解决问题的主要手段。 分支结构 — 根据一定条件来执行的各条语句。
matlab语言与控制系统仿真参考答案第4章
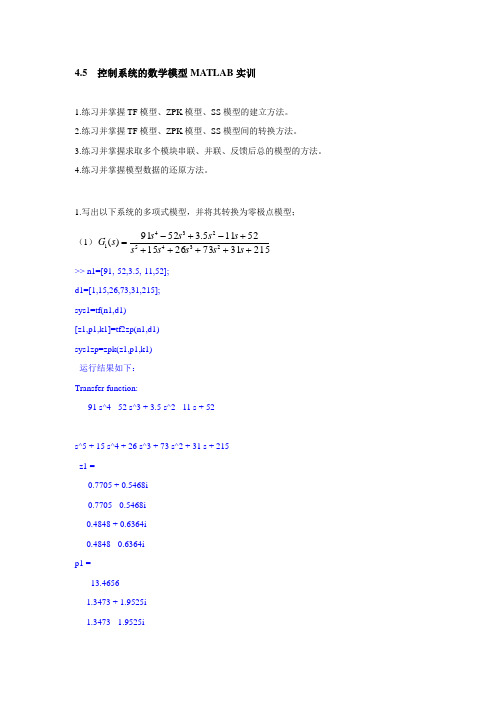
4.5 控制系统的数学模型MATLAB 实训1.练习并掌握TF 模型、ZPK 模型、SS 模型的建立方法。
2.练习并掌握TF 模型、ZPK 模型、SS 模型间的转换方法。
3.练习并掌握求取多个模块串联、并联、反馈后总的模型的方法。
4.练习并掌握模型数据的还原方法。
1.写出以下系统的多项式模型,并将其转换为零极点模型;(1)2153173261552115.35291)(23452341++++++-+-=s s s s s s s s s s G >> n1=[91,-52,3.5,-11,52];d1=[1,15,26,73,31,215];sys1=tf(n1,d1)[z1,p1,k1]=tf2zp(n1,d1)sys1zp=zpk(z1,p1,k1)运行结果如下:Transfer function:91 s^4 - 52 s^3 + 3.5 s^2 - 11 s + 52-------------------------------------------s^5 + 15 s^4 + 26 s^3 + 73 s^2 + 31 s + 215z1 =0.7705 + 0.5468i0.7705 - 0.5468i-0.4848 + 0.6364i-0.4848 - 0.6364ip1 =-13.4656-1.3473 + 1.9525i-1.3473 - 1.9525i0.5801 - 1.5814ik1 =91Zero/pole/gain:91 (s^2 - 1.541s + 0.8927) (s^2 + 0.9697s + 0.6401)--------------------------------------------------------------------------(s+13.47) (s^2 - 1.16s + 2.837) (s^2 + 2.695s + 5.627)(2)21.311395.2251315239.5621.635.711017.38)(23456723452++-+-++++-+-=s s s s s s s s s s s s s G >> n2=[1,-38.7,101,-71.5,63.1,562.39];d2=[1,2,5,-31,51,-22.5,39,311.21];sys2=tf(n2,d2)[z2,p2,k2]=tf2zp(n2,d2)sys2zpkmx=zpk(z2,p2,k2)Transfer function:s^5 - 38.7 s^4 + 101 s^3 - 71.5 s^2 + 63.1 s + 562.4---------------------------------------------------------------------------s^7 + 2 s^6 + 5 s^5 - 31 s^4 + 51 s^3 - 22.5 s^2 + 39 s + 311.2z2 =35.94372.95890.5590 + 1.9214i0.5590 - 1.9214i-1.3206p2 =-2.5015 + 3.1531i-2.5015 - 3.1531i1.9492 + 1.0027i1.9492 - 1.0027i0.2072 - 1.7349i-1.3097k2 =1Zero/pole/gain:(s-35.94) (s-2.959) (s+1.321) (s^2 - 1.118s + 4.004)--------------------------------------------------------------------------------------------------(s+1.31) (s^2 - 3.898s + 4.805) (s^2 - 0.4143s + 3.053) (s^2 + 5.003s + 16.2)2.写出以下系统的零极点模型,并将其转换为多项式模型,并将其展开成为部分分式形式;(1))11.5)(9.4)(5.3)(6.2)(3.1()02.6)(5.0(36)(1+++++++=s s s s s s s s s G >> z=[-0.5;-6.02];>> p=[0;-1.3;-2.6;-3.5;-4.9;-5.11];>> k=36;>> sys=zpk(z,p,k)Zero/pole/gain:36 (s+0.5) (s+6.02)--------------------------------------------------s (s+1.3) (s+2.6) (s+3.5) (s+4.9) (s+5.11)>> [n,d]=zp2tf(z,p,k)n =0 0 0 0 36.0000 234.7200 108.3600d =1.0000 17.4100 116.1430 367.5889 544.8325 296.2114 0>> systfxs=tf(n,d)Transfer function:36 s^2 + 234.7 s + 108.4-------------------------------------------------------------------------------s^6 + 17.41 s^5 + 116.1 s^4 + 367.6 s^3 + 544.8 s^2 + 296.2 s>> [r,p,k]=residue(n,d);>> [r';p']ans =9.1407 -14.8730 17.4236 -14.7227 2.6656 0.3658-5.1100 -4.9000 -3.5000 -2.6000 -1.3000 0即部分分式分解结果为 s s s s s s s G 3658.03.16656.26.27227.145.34236.179.4873.1411.51407.9)(++++-+++-+=(2))6)(5)(4)(2()5.3)(3)(1(15.9)(22+-++-++=s s s s s s s s s G >> z=[-1;-3;3.5];>> p=[0;0;-2;-4;5;6];>> k=9.15;>> sys=zpk(z,p,k)Zero/pole/gain:9.15 (s+1) (s+3) (s-3.5)-------------------------------s^2 (s+2) (s+4) (s-5) (s-6)>> [n,d]=zp2tf(z,p,k)n =0 0 0 9.1500 4.5750 -100.6500 -96.0750d =1 -5 -28 92 240 0 0>> systfxs=tf(n,d)Transfer function:9.15 s^3 + 4.575 s^2 - 100.7 s - 96.08---------------------------------------------------s^6 - 5 s^5 - 28 s^4 + 92 s^3 + 240 s^2>> [r,p,k]=residue(n,d);>> [r';p']ans =0.5004 -0.4183 0.0715 0.1123 -0.2659 -0.40036.0000 5.0000 -4.0000 -2.0000 0 0即部分分式分解结果为 24003.02659.021123.040715.054183.065004.0)(s s s s s s s G --++++---= 3.已知系统的状态空间表达式,写出其SS 模型,并求其传递函数矩阵(传递函数模型),若状态空间表达式为⎩⎨⎧+=+=DuCx y Bu Ax x ,则传递函数矩阵表达式为: D B A sI C s G +-=-1)()(。
通信系统仿真课后答案
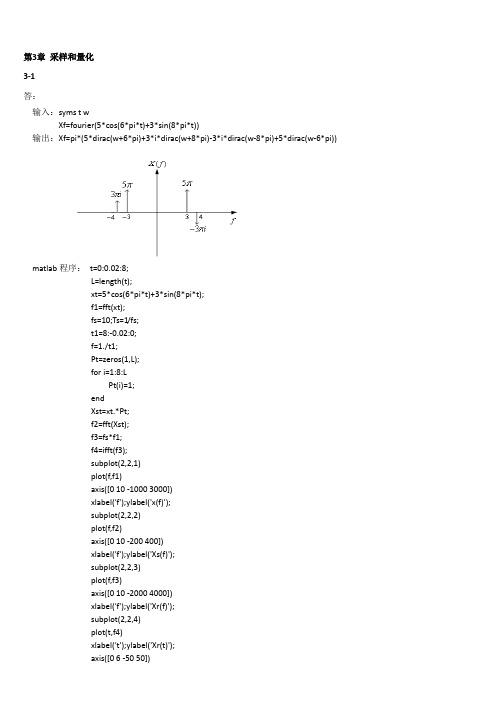
第3章采样和量化3-1答:输入:syms t wXf=fourier(5*cos(6*pi*t)+3*sin(8*pi*t))输出:Xf=pi*(5*dirac(w+6*pi)+3*i*dirac(w+8*pi)-3*i*dirac(w-8*pi)+5*dirac(w-6*pi))matlab程序:t=0:0.02:8;L=length(t);xt=5*cos(6*pi*t)+3*sin(8*pi*t);f1=fft(xt);fs=10;Ts=1/fs;t1=8:-0.02:0;f=1./t1;Pt=zeros(1,L);for i=1:8:LPt(i)=1;endXst=xt.*Pt;f2=fft(Xst);f3=fs*f1;f4=ifft(f3);subplot(2,2,1)plot(f,f1)axis([0 10 -1000 3000])xlabel('f');ylabel('x(f)');subplot(2,2,2)plot(f,f2)axis([0 10 -200 400])xlabel('f');ylabel('Xs(f)');subplot(2,2,3)plot(f,f3)axis([0 10 -2000 4000])xlabel('f');ylabel('Xr(f)');subplot(2,2,4)plot(t,f4)xlabel('t');ylabel('Xr(t)');axis([0 6 -50 50])510-1000010002000fx (f )510-2000200fX s (f )510-2000020004000fX r (f )0246tX r (t )3-2答:matlab 程序: t=0:0.02:8;L=length(t);xt=5*cos(6*pi*t)+3*sin(8*pi*t); f1=fft(xt); fs=7;Ts=1/fs; t1=8:-0.02:0; f=1./t1;Pt=zeros(1,L); for i=1:8:L Pt(i)=1; endXst=xt.*Pt; f2=fft(Xst); f3=fs*f1; f4=ifft(f3); subplot(2,2,1) plot(f,f1)axis([0 10 -1000 3000]) xlabel('f');ylabel('x(f)'); subplot(2,2,2) plot(f,f2)axis([0 10 -200 400]) xlabel('f');ylabel('Xs(f)'); subplot(2,2,3) plot(f,f3)axis([0 10 -2000 4000]) xlabel('f');ylabel('Xr(f)'); subplot(2,2,4) plot(t,f4)xlabel('t');ylabel('Xr(t)'); axis([0 6 -50 50])510-1000010002000fx (f )510-2000200fX s (f )510-2000020004000fX r (f )0246-5050tX r (t )3.5信号()5sin(10)x t t π=,(a )信号的动态范围为25.84,49.93,98.09,194.42 dB SNR =。
matlab第四章课后作业解答
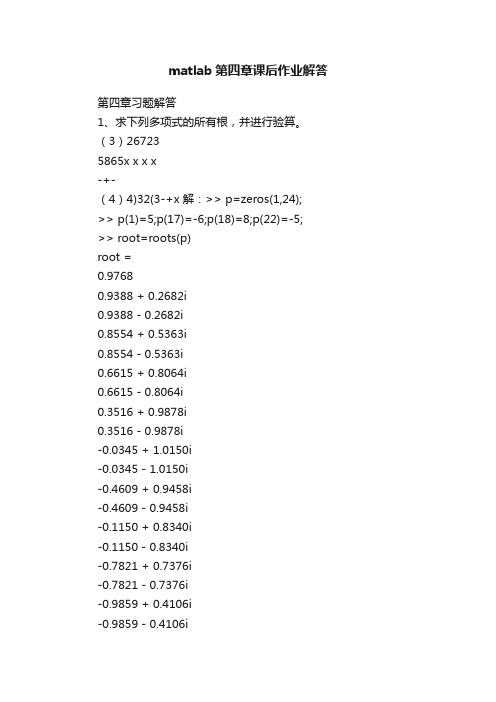
matlab第四章课后作业解答第四章习题解答1、求下列多项式的所有根,并进行验算。
(3)267235865x x x x-+-(4)4)32(3-+x 解:>> p=zeros(1,24); >> p(1)=5;p(17)=-6;p(18)=8;p(22)=-5; >> root=roots(p)root =0.97680.9388 + 0.2682i0.9388 - 0.2682i0.8554 + 0.5363i0.8554 - 0.5363i0.6615 + 0.8064i0.6615 - 0.8064i0.3516 + 0.9878i0.3516 - 0.9878i-0.0345 + 1.0150i-0.0345 - 1.0150i-0.4609 + 0.9458i-0.4609 - 0.9458i-0.1150 + 0.8340i-0.1150 - 0.8340i-0.7821 + 0.7376i-0.7821 - 0.7376i-0.9859 + 0.4106i-0.9859 - 0.4106i-1.0416-0.7927>> polyval(p,root)ans =1.0e-012 *-0.07120.0459 - 0.0081i0.0459 + 0.0081i-0.0419 + 0.0444i-0.0419 - 0.0444i0.0509 + 0.0929i0.0509 - 0.0929i-0.2059 + 0.0009i-0.2059 - 0.0009i-0.0340 + 0.0145i-0.0340 - 0.0145i0.1342 + 0.0910i0.1342 - 0.0910i0.0025 + 0.0027i0.0025 - 0.0027i-0.0077 + 0.4643i-0.0077 - 0.4643i-0.3548 - 0.1466i-0.3548 + 0.1466i-0.0251-0.0073(4) >> p1=[2 3];>> p=conv(conv(p1,p1),p1)-[0 0 0 4]; >> root=roots(p)root =-1.8969 + 0.6874i-1.8969 - 0.6874i-0.7063>> polyval(p,root)ans =1.0e-014 *-0.7105 - 0.6217i-0.7105 + 0.6217i6、求解下列方程组在区域1,0<<βα内的解-=+=.sin 2.0cos 7.0,cos 2.0sin 7.0βαββαα 解:以初值)5.0,5.0(),(00=βα进行求解>> fun=inline('[0.7*sin(x(1))+0.2*cos(x(2))-x(1),0.7*cos(x(1))-0.2*sin(x(2))-x(2)]');>> [x,f,h]=fsolve(fun,[0.5 0.5])Optimization terminated: first-order optimality is less than options.TolFun.x =0.5265 0.5079f =1.0e-007 *-0.1680 -0.2712h =1因而,该方程组的近似根为5079.0,5265.0==βα。
MatlabSimulink系统建模和仿真

图:电容的充电、放电过程的仿真结果。在充电仿真中,输出信号 为系统的零状态响应。在放电过程仿真中,输出信号为系统的零输 入响应。 如果要仿真系统输入信号为任意函数的情况,只需要修改仿 真程序中的输入信号设臵即可。
“实例2.3”单摆运动过程的建模和仿真。 (1)单摆的数学模型 设单摆摆线的固定长度为l ,摆线的质量忽略不计,摆锤质 量为m ,重力加速度为g ,设系统的初始时刻为t=0 ,在任 意 t 0 时刻摆锤的线速度为v(t) ,角速度为 w(t ) ,角位移 为 (t ) 。以单摆的固定位臵为坐标原点建立直角坐标系, 水平方向为x 轴方向。如下图所示。
图:电容的充电电路以及等价系统
(1)数学分析
首先根据网络拓扑和元件伏安特性建立该电路方程组
dy (t ) i (t ) C dt
dy (t ) 1 1 x(t ) y (t ) dt RC RC
y(t ) x(t ) Ri (t )
并化简得
该方程也称为系统的状态方程。在方程中,变量y 代表电 容两端的电压,是电容储能的函数。本例中它既是系统的 状态变量,又是系统的输出变量。
7.1 Matlab编程仿真的方法
7.1.1 概述 通过编程的形式建立计算机仿真模型是最基本的 计算机建模方法。Matlab编程仿真过程就是用编 写脚本文件或函数文件来描述数学模型,并实现 计算机数值求解的过程。 我们把外界对系统产生作用的物理量称为输入 信号或激励,把由于系统内部储存的能量称为系 统的状态,而将系统对外界的作用物理量称为系 统的输出信号或响应。
图:模拟真实示波器显示的调幅仿真波形,仿真中考虑了输 入信号与示波器扫描不同步,载波相位噪声以及加性信道噪 声的影响
7.1.3 连续动态系统的Matlab编程仿真 7.1.3.1 几个实例
MATLAB及Simulink应用实验指导书+答案
《MATLAB及应用》实验指导书班级:姓名:学号:总评成绩:汽车工程系电测与汽车数字应用中心目录实验04051001 MATLAB语言基础1实验04051002 MATLAB科学计算及绘图4实验04051003 MATLAB综合实例编程6实验04051001MATLAB 语言基础1实验目的1) 熟悉MATLAB 的运行环境 2) 掌握MATLAB 的矩阵和数组的运算 3) 掌握MATLAB 符号表达式的创建 4) 熟悉符号方程的求解2实验内容说明:从下面的题目、第1~4章课后习题中任选10题,学号为奇数的选择奇数号题,学号为偶数的选择偶数号题,并在答案之前标注题目来源,例如“课本第1章题2”、“指导书题3”等。
可以采用notebook 格式输出结果(关于notebook 请查阅其他参考资料,或上网搜索) 例如:课本第4章题1.一个半径为r 的求体积V 和表面积A 分别为:334r V π=、24r A π= a.给出以下程序的伪代码描述:计算当30≤≤r 米时的V 和A ,并同时绘制V 相对于A 的图形。
b.编写和运行部分a 中所描述的程序。
解:clc,clear; r=0:0.1:3; V=4/3*pi*r.^3; A=4*pi*r.^2; plot(A,V);grid on; xlabel('Surface Area'); ylabel('Volume');1.在一个已知的测量矩阵T(100×100)中,删除整行全为0的行,删除整列内容全为0的整列(判断某列元素是否为0方法:检查T(: ,i).*(T(: ,j))是否为0)。
2.假设汽车系在下列各年度的人口统计如表所示试用一个二维矩阵STU表示上述数据,并请计算出下列各数值:(1)汽车系在2002~2006年之间的每年平均新生、毕业生人数。
(2)5年来汽车系共有多少毕业生?(3)在哪几年,新生数目比毕业生多?(4)5年来每年的毕业生对新生的比例平均值为何?3.完成下列矩阵运算:(1) 使用randn 产生一个(10×10)的矩阵A(2) 计算B=(A+A ’)/2。