信号与系统LTI系统微分特性证明
信号与系统课件:第二章 LTI系统
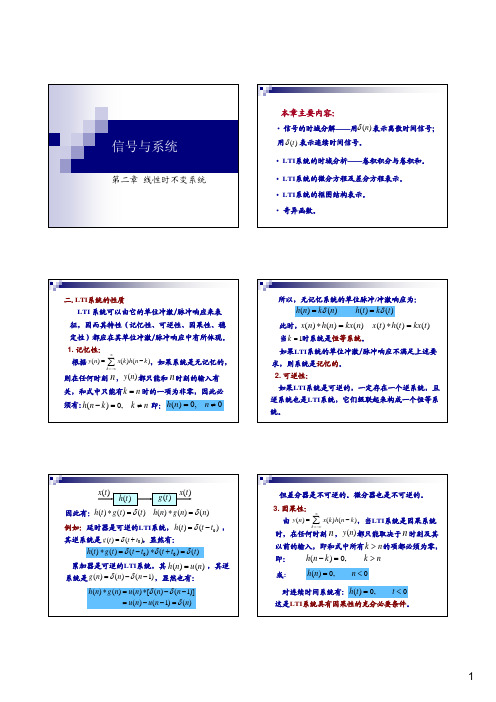
2.1 离散时间LTI系统: 卷积和
(1)用移位单位抽样信号表示离散时间信号 (2)卷积和在离散时间信号LTI系统中的表征 (3)卷积和的计算 (4) 离散时间信号LTI系统的性质
(1)用单位抽样信号表示离散时间信号
x[n] ... x[1] n 1 x[0] n x[1] n 1... x[n][0] x[n 1][1]
(1)初始条件为n<0时,y(n)=0,求其单位抽样响应;
(2)初始条件为n≥0时,y(n)=0,求其单位抽样响应。
解:(1)设x(n) (n),且 y(1) h(1) 0 ,必有
y(n) h(n) 0, n 0
依次迭代
y(0) h(0) (0) 1 y(1) 1 0 1
2
当系统的初始状态为零,单位抽样响应h(n)就 能完全代表系统,那么对于线性时不变系统,任意 输入下的系统输出就可以利用卷积和求得。
差分方程在给定输入和边界条件下,可用迭代 的方法求系统的响应,当输入为δ(n)时,输出 (响应)就是单位抽样响应h(n)。
例:常系数差分方程
y(n) x(n) 1 y(n 1) 2
x[n]u[n] x[k]u[n k] x[k]
k
k
(ii)交换律:
yn xnhn hn xn
例子: 线性时不变系统中的阶跃响应 sn
sn unhn hnun
阶跃输入
输 单位抽样信号 入 响应的累加
n
sn hk
k
(iii)分配律:
xnh1n h2 n xnh1n xnh2 n
y(1) h(1) (1) 1 y(0) 0 1 1
2
22
y(2) h(2) (2) 1 y(1) 0 1 1 (1)2
燕庆明 信号与系统(第二版) 课后习题答案

())()()]([),()(20d t t tf t tg t g T t t f t g -==-=令,∞-≠-)()(00t t y t t T f f ,=-)(0t t y f)()(00t t f t t --。
(3))()(0t t f t g -=令,)()()]([0t t f t g t g T --=-=,≠-)(0t t T f )(0t t y f -,)()(00t t f t t y f +-=-线性时不变系统。
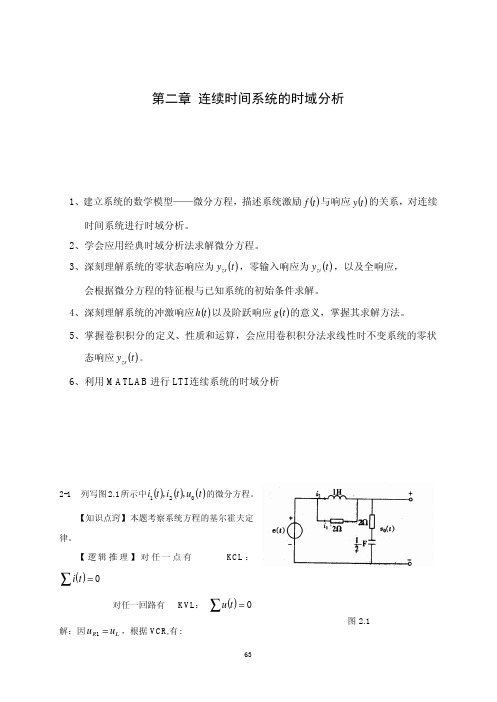
显然其不相等,即为非不失一般性,设可以表示为为系统运算子,则设解时不变系统?判断该系统是否为线性的关系为与输出已知某系统输入),()()()]([),()()]([)()()(,)()]([)()(T :)()()()(.2.12111121t y t f t f t f T t y t f t f T t f t f t f t f t f T t y t y t f t y t y t f =+===+====1.3判断下列方程所表示系统的性⎰+=t dx x f dtt df t y 0)()()(:)1()()()]([:)2(2't f t y t y =+(3):)2()()(3)(2)(''''-+=++t f t f t y t y t y (4):)(3)(2)('2)("t f t y t ty t y =++ 线性 非线性时不变 线性时不变 线性时变1.4。
试证明方程y'(t)+ay(t)=f(t)所描述的系统为线性系统。
证明:不失一般性,设输入有两个分量,且f 1(t)→y 1(t),f 2(t)→y 2(t) 则有y 1'(t)+ay 1(t)=f 1(t),y 2'(t)+ay 2(t)=f 2(t) 相加得y 1'+ay 1(t)+y 2'(t)+ay 2(t)=f 1(t)+f 2(t) 即dtd[y 1(t)+y 2(t)]+a[y 1(t)+y 2(t)] =f 1(t)+f 2(t )可见f 1(t)+f 2(t)→y 1(t)+y 2(t)即满足可加性,齐次性是显然的。
信号与系统课后题解第二章
⑺
对⑺式求一阶导,有:
de(t ) d 2 i 2 (t ) di (t ) du (t ) =2 +2 2 + c 2 dt dt dt dt de(t ) d 2 i2 (t ) di (t ) =2 + 2 2 + 2i1 (t ) + 2i 2 (t ) 2 dt dt dt
⑻
将⑸式代入⑻式中,有:
λ 2 + 2λ + 1 = 0
可解得特征根为 微分方程齐次解为
λ1, 2 = −1
y h (t ) = C1e −t + C2 te− t
由初始状态为 y (0 ) = 1, y ' (0 ) = 0 ,则有:
C1 = 1 − C 1 + C 2 = 0
由联立方程可得 故系统的零输入响应为:
由联立方程可得 故系统的零输入响应为:
A1 = 2, A2 = −1
y zi (t ) = 2e − t − e −2 t
(2)由原微分方程可得其特征方程为
λ 2 + 2λ + 2 = 0
可解得特征根为 微分方程齐次解为
λ1, 2 = −1 ± i
y h (t ) = e −t (C1 cos t + C2 sin t )
(− 3C1 + 3C2 )δ (t ) + (C1 + C2 )δ ' (t ) − (− 2C1 + C 2 )δ (t ) = δ (t )
(
(
( + C e )δ (t ) + (C e
2 1
)
−2 t
+ C2 e t δ ' (t )
信号与系统课程设计(信号调制与解调)(采样定理)(LTI系统分析)
课题一信号调制与解调题目说明:从语音,图像的原始信息变过来的原始信号频谱分量频率较低,不适宜在信道中长距离传输。
因此,在通信系统的发送通端常需要有调制过程将其转换为适合传输的信号,在接收端则需要有调节过程,将信号还原成原来的信息,以便更准确的利用信息。
原理分析:调制就是按调制信号的变化规律去改变某些参数。
解调是调制的逆过程,即从已调制信号中恢复或提取调制信号的过程。
幅度调制是正弦型载波的幅度随调制信号变化的过程。
采用模拟调制利用正旋波载波的幅度调制,频率调制和相位调制的方式进行信号的处理。
同步解调端本振信号频率必须与发射端调制的载波信号的频率和相位相同才能实现同步解调。
脉冲调制信号只有在脉冲出现才需要存在,在其他时间内等于零,这样就有可能在这空余的时间间隔中去传输其他路德信号,发送端和接受端的转换开关按照同样的顺序和周期轮流接通各个通道,在信道中传送的是各个脉冲幅度调制信号的和,各个脉冲出现在不同的时间段。
而通过接收端的开关以后各路接受端接收到的相当于某一路信号脉冲幅度的结果,可以用低通滤波器进行解调。
实验内容:1.将一正旋信号x(n)=sin(2πn/256)分别以100000Hz的载波和1000000Hz的取样频率进行调制,写出MATLAB脚本实现抑制载波幅度调制,实现同步解调,滤波输出的波形。
2.分别作出cos(10t)cos(w c t)和[1+0.5sin(10t)]cos(w c t)的波形图和频谱图,并对上面调制信号进行解调,观察与源图的区别。
模块设计1:1.产生一个输入信号 2.产生一个载波信号3.构造用于解调的低通滤波器4.低通滤波解调5.画图MATLAB程序1:>> clear; %清除已存在变量n=0:0.0001:256; %自变量e=sin(2*pi*n/256); %调治信号s=cos(100000*n); % 载波信号a=e.*s; % 调制b=a.*s; % 解调[nb,na]=butter(4,100,'s'); % 低通滤波sys=tf(nb,na); % 构建sys对象c=lsim(sys,b,n); %低通滤波subplot(2,2,1) % 图形输出语句plot(n,e);title('调制信号'); %图形标题>> xlabel('n'),ylabel('e(n)'); %横纵坐标变量>> grid on %坐标网格>> subplot(2,2,2) % 图形输出语句>> plot(n,a);>> title('调幅信号'); %图形标题>> xlabel('n'),ylabel('a(n)'); %横纵坐标变量>> grid on %坐标网格>> subplot(2,2,3) % 图形输出语句>> plot(n,b);>>title('解调波形'); %图形标题>> xlabel('n'),ylabel('b(n)'); %横纵坐标变量>> grid on %坐标网格>> subplot(2,2,4) % 图形输出语句>> plot(n,c);>> title('滤波后的波形');%图形标题>>xlabel('n'),ylabel('e(n)'); %横纵坐标变量>> grid on %坐标网格模块设计2:1.产生两个输入信号 2.用克诺内科内积产生两个周期行序列脉冲3.调制并向加4.构造用于解调的低通滤波器5.低通滤波解调 6画图MATLAB程序2:>> clear; % 清除变量t=0:0.001:9.999; % 定义自变量取值范围和间隔e1=cos(10*t).*cos(600*t); % 输入信号e2=(1+0.5*sin(10*t)).*cos(600*t); %输入信号p0=ones(1,2500);p1=kron(p0,[1,0,0,0]); %第一个序列脉冲p2=kron(p0,[0,0,1,0]); % 第二个序列脉冲a=p1.*e1+p2.*e2; 调制并向加[nb,na]=butter(4,20,'s'); % 用于解调的低通滤波器sys=tf(nb,na); %构建sys对象b1=a.*p1; % 取得第一路信号的脉冲调制信号c1=lsim(sys,b1,t);%通过低通滤波解调输出b2=a.*p2; %取得第二路信号的脉冲调制信号c2=lsim(sys,b2,t); % 通过低通滤波解调输出subplot(4,2,1) % 图形输出语句plot(t,e1);title('第一路输出信号'),xlabel('t'),ylabel('e(t)');grid on%图形横纵坐标,标题,坐标网格subplot(4,2,2) % 图形输出语句plot(t,e2);title('第二路输出信号'),xlabel('t'),ylabel('e(t)');grid on%图形横纵坐标,标题,坐标网格subplot(4,2,3) % 图形输出语句plot(t,e1.*p1);title('第一路脉冲调制信号'),xlabel('t'),ylabel('e(t)');grid on %图形横纵坐标,标题,坐标网格subplot(4,2,4) % 图形输出语句plot(t,e2.*p2);title('第二路脉冲调制信号'),xlabel('t'),ylabel('e(t)');grid on %图形横纵坐标,标题,坐标网格subplot(4,2,5) % 图形输出语句plot(t,a);title('合成的传输信号'),xlabel('t'),ylabel('e(t)');grid on%图形横纵坐标,标题,坐标网格subplot(4,2,6) % 图形输出语句plot(t(5001:5250),a(5001:5250));title('局部放大后的合成信号'),xlabel('t'),ylabel('e(t)');grid on%图形横纵坐标,标题,坐标网格实验总结:通过对理论知识的学习,使自己对信号的调制与解调具有一定的认知水平,然后开始做实验,此时要理论结合实践,作出波形图后要考虑与理论波形进行比较,比较的方法是,首先判断所测波形是否正确,若不正确找出错误原因,若正确则分析实测波形与理论波形不完全相同的原因。
信号与系统王明泉版本~第二章习题解答
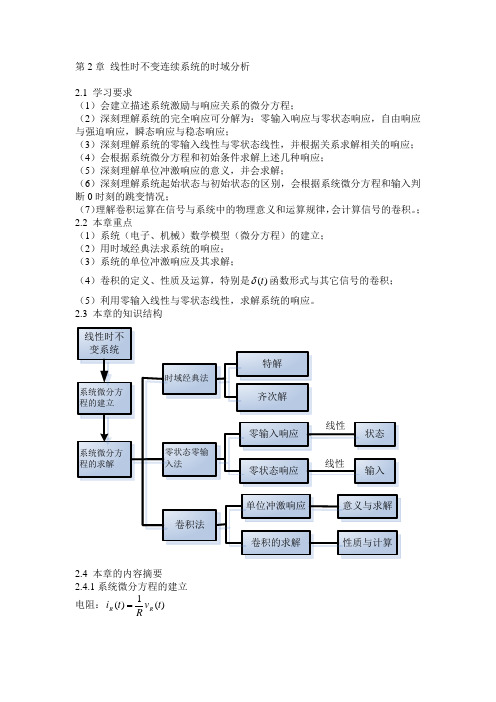
第2章 线性时不变连续系统的时域分析2.1 学习要求(1)会建立描述系统激励与响应关系的微分方程;(2)深刻理解系统的完全响应可分解为:零输入响应与零状态响应,自由响应与强迫响应,瞬态响应与稳态响应;(3)深刻理解系统的零输入线性与零状态线性,并根据关系求解相关的响应; (4)会根据系统微分方程和初始条件求解上述几种响应; (5)深刻理解单位冲激响应的意义,并会求解;(6)深刻理解系统起始状态与初始状态的区别,会根据系统微分方程和输入判断0时刻的跳变情况; (7)理解卷积运算在信号与系统中的物理意义和运算规律,会计算信号的卷积。
; 2.2 本章重点(1)系统(电子、机械)数学模型(微分方程)的建立; (2)用时域经典法求系统的响应; (3)系统的单位冲激响应及其求解;(4)卷积的定义、性质及运算,特别是()t δ函数形式与其它信号的卷积; (5)利用零输入线性与零状态线性,求解系统的响应。
2.3 本章的知识结构2.4 本章的内容摘要2.4.1系统微分方程的建立电阻:)(1)(t v Rt i R R =电感:dtt di L t v L L )()(= )(d )(1)(0t i v Lt i L tL L +=⎰∞-ττ 电容:dtt dv C t i C C )()(= ⎰+=tt L C C t i i Ct v 0)(d )(1)(0ττ 2.4.2 系统微分方程的求解 齐次解和特解。
齐次解为满足齐次方程t n t t h e c e c e c t y 32121)(λλλ+⋅⋅⋅++=当特征根有重根时,如1λ有k 重根,则响应于1λ的重根部分将有k 项,形如t k t k t k t k h e c te c e t c e t c t y 111112211)(λλλλ++⋅⋅⋅++=--- 当特征根有一对单复根,即bi a +=2,1λ,则微分方程的齐次解bt e c bt e c t y at at h sin cos )(21+= 当特征根有一对m 重复根,即共有m 重ib a ±=2,1λ的复根,则微分方程的齐次解bt e t c bt te c bt c t y at m m at h cos cos cos )(121-+⋅⋅⋅++= bt e t d bt te d bt e d at m m at at sin sin sin 121-+⋅⋅⋅+++ 特解的函数形式与激励函数的形式有关。
信号与系统 梁风梅主编 电子工业出版社 ppt第三章答案

习题三3.1考虑一个连续时间LTI 系统,满足初始松弛条件,其输入)(t x 与输出)(t y 的关系由下列微分方程描述:d ()4()()d y t y t x t t+= (1)若输入(13)()()j t x t e u t -+=,求输出)(t y 。
(2)若输入()e cos(3)()t x t t u t -=,求输出)(t y 。
解:此系统的特征方程为40s += 所以4()t h y t Ae -= (1)(13)()()j tx t eu t -+=设(13)()e j t p y t Y -+= 则(13)(13)(13)(13j)e 4e e ,0j tj t j t Y Y t -+-+-+-++=>解得11336jY j -==+ 所以4(13)1()()()e e ()6t j t h p j y t y t y t A u t --+-⎛⎫=+=+ ⎪⎝⎭又因为初始松弛,所以106jA -+= 即16j A -=所以4(13)11()()()()()66t j th p j j y t y t y t e e u t --+--=+=+ (2)()cos(3)()t x t e t u t -=是(1)中(13)()()j tx t eu t -+=的实部,用2()x t 表示cos(3)()t e t u t -,用1()x t 表示(13)()j t e u t -+观察得{}21()Re ()x t x t =所以{}421111()Re ()cos(3)sin(3)()666t t t y t y t e e t e t u t ---⎛⎫==-++ ⎪⎝⎭3.2若离散时间LTI 系统的输入[]x n 与输出][n y 的关系由下述差分方程给出:][]1[25.0][n x n y n y =--求系统的单位冲激响应][n h 。
解:[]0.25[1][]h n h n n δ=-+因为该系统是因果的,所以0n <时,[]0h n =2231[0]0.25[1][0]01111[1]0.25[0][1]1044111[2]0.25[1][2]0444111[3]0.25[2][3]0444 (111)[]0.25[1][]0444n nh h h h h h h h h n h n n δδδδδ-=-+=+==+=⨯+==+=⨯+==+=⨯+==-+=⨯+=综上,1[][]4n h n u n = 3.3系统S 为两个系统1S 与2S 的级联:S1:因果LTI 系统,[]0.5[1][]w n w n x n =-+; S2: 因果LTI 系统,[][1][]y n ay n bw n =-+][n x 与][n y 的关系由下列差分方程给出:[]0.125[2]0.75[1][]y n y n y n x n +---=(1) 确定a 与b 。
信号与系统课后答案第三章作业答案
初始为 0, C2 -4
y f (t) -4e3tu(t) 4e2tu(t)
全响应= yx (t)+y f (t) 4e2tu(t)-2e3tu(t)
3-2 描述某 LTI 系统的微分方程为
d2 y(t) dt 2
3dy(t) dt来自2y(t)
df (t) dt
6
1
1
(2e1 e1 et ) u(t)
e1(2 et ) u(t)
(2)
f
(t)
a[u(t
s) 2
u(t
2)]
h(t) b[u(t 2) u(t 3)]
f
(t)
h(t)
ab[(t
1 2
)
u(t
1 2
)
(t
1 2
)
u(t
1) 2
tu(t)
1 4
(et
e3t
)u(t)
1 2
t
e3tu(t)
[
1 4
et
(
1 2
t
1 4
)e3t
]u
(t)
3-19 一 个 LTI 系 统 , 初 始 状 态 不 祥 。 当 激 励 为 f (t) 时 其 全 响 应 为
(2e3t sin 2t)u(t) ;当激励为 2 f (t) 时其全响应为 (e3t 2sin 2t)u(t) 。求
(1) 初始状态不变,当激励为 f (t 1) 时的全响应,并求出零输入相应、
零状态响应; (2) 初始状态是原来的两倍、激励为 2 f (t) 时系统的全响应。
信号与系统(王小敏)第3章第1讲线性是不变系统
件,由此可以得出 y(0)。进一步,又可以通过 y(0) 和 y(−1), y(−2),L L , y(−N +1) 求得 y(1),依次类推可求出 所有n ≥ 0 时的解。
若将差分方程改写为:
∑ ∑ y(n −
N)
=
1 aN
⎡ ⎢⎣
M k =0
bk
x(n
−
k
)
−
N −1 k =0
ak
y(n
−
k
)⎤⎥⎦
=0
的解。欲求得齐次解,可根
N
据齐次方程建立一个特征方程:∑ a k λ k = 0 求出
k =0
其特征根。在特征根均为单阶根时,可得出齐次解
的形式为:
N
∑ yh (t) = Ckeλkt , k =1
其中Ck 是待定的常数。
要确定系数 Ck ,需要有一组条件,暂且称为附加 条件。仅仅从确定待定系数 Ck 的角度来看,这一组 附加条件可以是任意的,包括附加条件的值以及给 出附加条件的时刻都可以是任意的。
累加器是可逆的LTI系统,其 h(n) = u(n) ,其逆 系统是 g(n) = δ (n) − δ (n −1),显然也有:
h(n) ∗ g(n) = u(n) ∗[δ (n) − δ (n −1)] = u(n) − u(n −1) = δ (n)
但差分器是不可逆的。微分器也是不可逆的。
3. 因果性: ∞ 由 y(n) = ∑ x(k)h(n − k),当LTI系统是因果系统 k =−∞
可以用线性常系数微分方程或线性常系数差分方程来 描述。分析这类LTI系统,就是要求解线性常系数微 分方程或差分方程。
一.线性常系数微分方程
( Linear Constant-Coefficient Differential Equation )