三轴步进电机控制系统
TMC428型3轴步进电机控制器的原理及应用

摘要:TMC428是TRINAMIC公司最新开发的步进电机运动控制器,它可减少电机控制软件设计的工作量,降低开发成本。
以它为核心(包括TMC236型步进电机驱动器)构成的3轴步进电机驱动控制系统具有尺寸小、控制简单的优点,可同时控制3个两相步进电机。
关键词:步进电机控制器 TMC4281 主要性能特点TMC428是小尺寸、高性价比的二相步进电机控制芯片。
它带有二个独立的SPI口,可分别与微处理器和带有SPI接口的步进电机驱动器相连以构成完整的系统。
其控制指令可由微处理器通过SPI接口给定。
TMC428提供了所有与数字运动控制有关的功能,包括位置控制、速度控制及微步控制等步进电机常用的控制功能。
这些功能如果让微处理器来完成,则需占用大量的系统资源,所以它的使用可将微处理器解放出来,以把资源用在接口的扩展和对步进电机的更高层次的控制上。
此外,TMC236也是TRINAMIC公司开发的带有串行接口的步进电机驱动器。
3个TMC236连结构成的菊花链(Daisychain)结构便是一种基于串行通讯的网络结构,可以使多个具有串行通信接口的设备以接力的方式传递数据。
TMC428可以通过SPI接口与它们相连接,以同时控制3个二相步进电机。
TMC428的主要特点如下:·根据不同的应用提供有SSOP16、SOP24、DIL20三种封装可选形式。
·可以同时对3个二相步进电机进行控制,所有电机可独立工作。
·根据微处理器给定的电机运动参数(位置,速度、加速度),依照梯形或三角形的速度由线产生驱动脉冲波形和顺序,来对电机进行位置和速度控制。
它有4种工作模式。
其中位置控制有RAMP模式和SOFT模式,速度控制有VELOCITY模式和HOLD模式。
·可微步控制。
采用6位分辨率的微步细分。
包括满步、半步直至64细分。
每个电机可分别选择其需要的微步分辨率。
满步频率最高达20kHz。
·通过可编程电流比例捉控制,可以使电机在不同的工作状态下采用大小不同的工作电流。
三轴步进控制系统

三轴步进控制系统
一、概述:
EasySmc2100采用60MHz高速ARM32位处理器,实现3轴的步进电机控制。控制器使用异步串行接口(RS232、RS422、RS485)与外部通信,可以和PLC,IPC,EasyHmi2200组成运动控制系统。控制器执行运动控制的所有细节,包括脉冲和方向信号的产生,原点的复位,上下限位开关的检测,自动加减速,插补运算等等,能很方便的替代PLC的位置控制模块,IPC的运动控制卡,极大的提高性能价格比。由于采用集散控制,上位机(PLC、IPC、EasyHmi2200)能从实时的运动控制任务中摆脱出来,更好的执行人机交互和其它控制任务。控制器功能齐全,使用方便,价格实惠。能实现任意两轴的直线,圆弧插补,输出脉冲达到100KHz。控制器全部程序由本公司自主开发,可以快速,准确的为用户订制特殊曲线的插补控制命令。开发中的EasySmc2200,采用ARM+CPLD的方法实现闭环控制,实现更高的控制精度。
基于PC 的步进电机三轴联动控制系统研究

基于PC的步进电机三轴联动控制系统研究张严林李海生钟震宇肖先文(广东省科学院自动化工程研制中心)摘要:详细介绍Windows环境下面用PC的并口直接控制三轴联动的步进电机运动控制系统。
分析了包括G代码编译、数字积分插补算法实现三轴联动、PC上微秒级定时器的实现方法等一系列关键技术问题。
关键字:步进电机;运动控制;数控中图分类号:TP273 文献标识码:BResearch on 3-axis Simultaneous-motioned Step Motor ControlSystem Based on PCZhang Yanlin Li Haisheng Zhong Zhenyu Xiao Xianwen(Automation Engineering R&M Center. Guangdong Academy Of Sciences)Abstract:The solution to control 3-axis Simultaneous-motioned Step Motor Control System directly in Windows OS based on PC LPT is presented. A series of key problems are analyzed such asG code compiling, DDA arithmetic for 3-axis simultaneous-motioned control, microsecond-level timeron PC, etc.Key words:Step Motor, Motion Control, NC1 引言当前,运动控制一般有两种方案,一种是分布式结构,即上位机和下位机独立的方式,由PC作为上位机,完成复杂用户界面和复杂的算法,下位机由单片机实现底层的电机运动控制,上位机一般通过串行口与下位机通信,发加工指令到下位机进行加工;另一种是PC完全控制,这种控制方式又分成两类,一类是PC通过并口直接发脉冲信号控制电机,另一类是在PC的扩展槽中插入运动控制卡来控制电机。
3轴控制器使用手册
三轴运动控制器操作手册目录一与外部驱动器及IO(输入输出)接线图 (4)二用户管理操作 (5)三系统参数设置 (6)四IO(输入输出)设置 (8)五系统自检操作 (10)六手动操作 (12)七编程操作 (14)八自动执行 (16)九指令详解 (18)十电子齿轮计算及公式 (20)十一编程案例 (23)十二常见问题及处理 (28)一与外部驱动器及IO(输入输出)接线图1.控制器与步进驱动器或伺服驱动器的连接(红色线为1号线)2.IO(外接开关及继电器)的接线图(红色线为1号线)注:因输入采用低电平有效,若选用光电开关,则需要选择NPN型。
二用户管理操作注意:所有重要参数只有用户登录以后才可修改保存。
防止他人随意更改参数,影响加工质量。
从主画面进入参数设置,并进入用户管理,进行密码输入。
输入用户密码,按确认键,若输入正确,则提示“用户登陆成功”,否则提示“密码错误,请重新输入”。
用户密码出厂值为“123456”。
用户登录成功后,则可进行加工参数的修改保存。
否则加工参数不可修改保存。
然后直接按退出按键,对系统参数及IO设置进行编辑,编辑完成,再次进入用户管理,并选择用户退出,按确认键,当前参数设置里的内容全部不可更改。
若需要修改,再次进入用户管理进行登录。
注:用户密码可以修改。
但是必须要记忆下新设的密码,否则加工参数将不可修改保存。
三系统参数设置从主界面的参数设置里进入系统参数,通过移动光标,对光标所在位置进行数据修改。
共分5屏,按“上页”“下页”键切换。
控制参数修改完毕可进入速度参数界面进行速度的参数修改,共3屏,修改方式同上。
修改完成后,按参数保存进入参数保存界面,按确认键对当前修改完成的数据进行保存。
若保存成功则提示“参数保存成功”。
注:加工过程中禁止进行参数保存。
按空格键,可将当前参数值清零。
当设定的速度值小于启动速度时,则速度值为启动速度。
当启动速度值设为0时,默认为控制器的最小极限速度。
四IO(输入输出)设置从主界面的参数设置里进入IO设置,对外部输入及输出进行定义,共5屏。
JXC92 3轴步进电机控制器说明书

Allow 100 mm minimum space between the front of the controller and a door (lid) so that the connectors can be connected and disconnected.
4 Installation
4.1 Installation
Warning
Do not install the product unless the safety instructions have been read and understood.
Design the installation so that the temperature surrounding the controller is 40oC max. Leave enough space between the controllers so that the operating temperature of the controllers remains within the specification range.
Connect to a PC using a USB
communication cable.
9
ENC1
Encoder connector
(16 pins)
Axis 1: Connect the actuator
10 MOT1
Motor power
单片机与mpc运动控制模块组成的三轴运动控制系统
单片机与mpc运动控制模块组成的三轴运动控制系统摘要:采用单片机stc89C2051和mpc微型运动控制模块作为控制系统的核心,控制三路步进电机做运动实验。
单片机发送指令给mpc微型运动控制模块,模块信号输出给步进驱动器作高速度运动。
可以定点运动,直线插补和圆弧插补。
1.引言运动控制的应用在国内已有十几年的历史,技术也相当成熟。
通常运动控制都需要用到运动控制卡,运动控制器等产品,但这些产品价格高昂,使用复杂,也不适合由单片机构成的控制系统。
而如果直接采用单片机来做运动控制,由于运动控制对系统性能要求非常高,单片机速度资源有限,难以设计出性能优良的运动控制模型。
因此,本文采用单片机和专业的mpc微型运动控制模块构成运动控制系统。
MPC微型运动控制模块采用新型FPGA设计,集成实用运动控制功能,可与普通单片机通过串口通讯对步进电机和伺服电机控制。
具有如下特点:◆串口通讯,仅需使用几条指令,简单可靠。
◆单模块最高六轴输出,多个模块组网工作可达120轴。
◆最大脉冲输出频率为2MHz,脉冲输出使用脉冲+方向方式。
◆最高六轴独立运动控制,任意两轴直线插补,任意两轴圆弧插补。
◆每轴一路硬件回原点。
◆模块带1000级指令缓存深度,指令先进先出。
◆模块体积小巧,仅3.5*2.5*1.5cm,双排直插30脚。
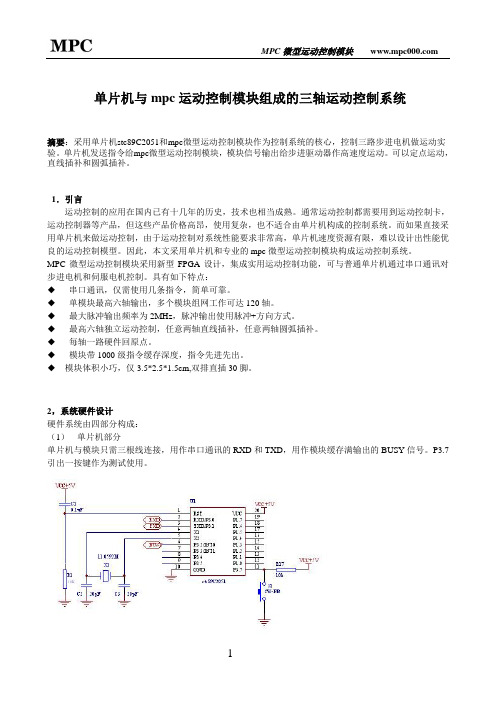
2,系统硬件设计硬件系统由四部分构成:(1)单片机部分单片机与模块只需三根线连接,用作串口通讯的RXD和TXD,用作模块缓存满输出的BUSY信号。
P3.7引出一按键作为测试使用。
(2)mpc微型运动控制模块部分mpc微型运动控制模块采用5V电源供电,RXD,TXD,BUSY与单片机连接。
X0,X1,X2可作为三路电机的原点信号,P1,D1为1轴的脉冲和方向信号。
P2,D2为2轴的脉冲和方向信号。
P3,D3为3轴的脉冲和方向信号。
(3)原点信号输入部分原点采用光藕隔离输入,输入端可接NPN型光电开关来作为原点信号。
三相步进电机控制系统的课程设计说明书
学号:11课程设计题目三相步进电机控制系统的设计学院自动化学院专业自动化专业班级自动化1201班姓名廖明黎指导教师石云2015 年 5 月20 日课程设计任务书学生:廖明黎专业班级:自动化1201班指导教师:石云工作单位:自动化学院题目: 三相步进电机控制系统的设计初始条件:设计三相步进电机控制系统,要求系统具有如下功能:用K0-K2做为通电方式选择键,K0为三相单三拍,K1为三相双三拍,K2为三相六拍;K3为启动/停止控制、K4方向控制、K5加速、K6减速;用4位LED显示工作步数。
用3个发光二极管显示状态:正转时黄灯亮,反转时绿灯亮,不转时红灯亮。
要求完成的主要任务:1.硬件设计:系统原理图2.软件设计:系统总体流程图、步进电机单三拍,双三拍,三相六拍各模块流程图、显示模块流程图等3.编写程序:能够完成上述任务并用仿真软件演示4.完成符合要求的设计说明书时间安排:2015年4月28日~2015年5月29日目录1概述 (6)2设计思路 (7)2.1步进电机的驱动 (7)2.2 LED显示步数 (7)2.3按键状态的读取 (7)2.4 控制系统的整体框图 (8)3系统的硬件设计 (9)3.1 总体的硬件设计 (9)3.2步进电机控制电路 (10)3.3八段数码管显示电路 (11)3.4启/停控制、正/反转控制、工作模式控制电路 (11)3.5发光二极管显示电路 (13)4系统的软件设计 (14)4.1系统总体流程图 (14)4.2三相步进电机模块流程图 (16)4.3显示模块流程图 (16)5系统仿真 (18)6小结与体会 (20)参考文献 (21)附录 (22)三相步进电机控制系统的设计1概述本次计算机控制技术课程设计的题目是:三相步进电机控制系统的设计。
本次课程设计使用89C51单片机作为主控芯片,利用ULN2003A集成电路作为三相步进电机的驱动电路,采用单极性驱动方式,使三相步进电机能在(1)三相单三拍,(2)三相双三拍,(3)三相六拍三种工作方式下正常工作;能实现的功能有:启动/停止控制、方向控制;快速控制、慢速控制;用4位LED数码管显示工作步数。
西门子三轴步进电机控制程序

西门子三轴步进电机控制程序以下是一个基本的西门子三轴步进电机控制程序的示例:```Python# 导入所需的模块from pyModbusTCP.client import ModbusClientimport time# 设置Modbus TCP服务器的IP地址和端口号server_ip = '192.168.1.100'server_port = 502# 创建Modbus客户端对象client = ModbusClient(host=server_ip, port=server_port, auto_open=True)# 检查连接状态if not client.is_open():print("无法连接到Modbus TCP服务器")exit()# 定义电机轴的地址axis1_address = 0x0000axis2_address = 0x0001axis3_address = 0x0002# 定义电机的参数speed = 100 # 速度(步数/秒)acceleration = 100 # 加速度(步数/秒^2)deceleration = 100 # 减速度(步数/秒^2)try:# 启动轴client.write_single_register(axis1_address + 1, acceleration) # 设置加速度client.write_single_register(axis1_address + 2, deceleration) # 设置减速度client.write_single_register(axis1_address + 3, speed) # 设置速度client.write_single_register(axis1_address + 4, 1) # 启动轴# 等待轴到达目标位置while client.read_single_register(axis1_address + 5) != 1:time.sleep(0.1) # 等待0.1秒# 停止轴client.write_single_register(axis1_address + 4, 0) # 停止轴# 关闭连接client.close()except Exception as e:print("发生错误:", str(e))client.close()```请注意,这只是一个基本的示例,具体的控制逻辑和参数设置需要根据实际情况进行调整。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三轴步进电机控制系统
三轴步进电机系统在机器人、机床加工中心、全方位跟踪等系统中都
有广泛的应用前景。
传统眼底照相系统主要采用手动控制来确定相机位置,本
系统可实现全自动瞳孔定位。
主要介绍三轴步进电机系统的实现。
1 眼底照相系统
眼底照相系统主要由以下3 个部分构成:
(1)三个二相步进电机及相应控制器构成三轴电机系统;
(2)电机驱动器负责接收控制命令参数及发送脉冲给相应电机;
(3)上位机由遥控面板或软件实现。
其系统工作流程:由眼底照相系统软件进行瞳孔自动定位和聚焦,调用
爬山算法确定焦距及瞳孔位置,再发送相应的控制指令给下位机,控制电机移
动从而调整相机至置最佳位置,周而复始直至最佳位置。
眼底照相系统流程此
系统采用的电机与驱动器均为金坛市三鑫电机有限公司产品:
二相步进电机型号:42BYGH107 步进电机是一种用电脉冲信号进行驱
动控制,并将电脉冲信号转换成相应的角位移或线位移的机电执行元件。
二相混合式步进电机驱动器型号:SH-2024B 该型号驱动器具有工作电
压范围宽、效率高,相电流、细分数可调,自动半流的特点,相电流设定从
0.5~2 A,细分数设定有2,5,10,20,40 共5 档,可满足微步距驱动的要求。
2.2 控制板
控制板基于STC89C58RD+专用电机控制板,为本实验室开发,具有如
下功能:
(1)五轴步进电机控制(15 路数字信号输出);。