自动控制原理C作业第二章答案
自动控制原理胡寿松主编课后习题答案详解-胡寿松第六版自控答案

20 db(t) + 5b(t) = 10c(t) dt
且初始条件均为零,试求传递函数 C(s) / R(s) 及 E(s) / R(s)
解:系统结构图及微分方程得:
G(s) = 20
H (s) = 10
6s + 10
20s + 5
20
C(s) = 10G(s) =
方程。 解:
设正常工作点为 A,这时 Q0 = K P0
在该点附近用泰勒级数展开近似为:
y
=
f
(
x0
)
+
df (x) dx
x0
(
x
−
x0
)
即 Q − Q0 = K1 (P − P0 )
其中 K1
= dQ dP P=P0
=
1K 2
1 P0
2-7 设弹簧特性由下式描述:
F = 12.65 y1.1
2-3 试证明图2-58(a)的电网络与(b)的机械系统有相同的数学模型。
2
胡寿松自动控制原理习题解答第二章
图 2-58 电网络与机械系统
1
解:(a):利用运算阻抗法得: Z1
=
R1
//
1 C1s
=
R1 C1s
R1
+
1 C1s
=
R1 = R1 R1C1s + 1 T1s + 1
Z2=Βιβλιοθήκη R2+1 C2s
运动模态 e −0.5t
−1t
所以: x(t) = t − 2(1 − e 2 )
(2) &x&(t) + x&(t) + x(t) = δ (t)。
自动控制原理-第2章习题解答精选全文完整版
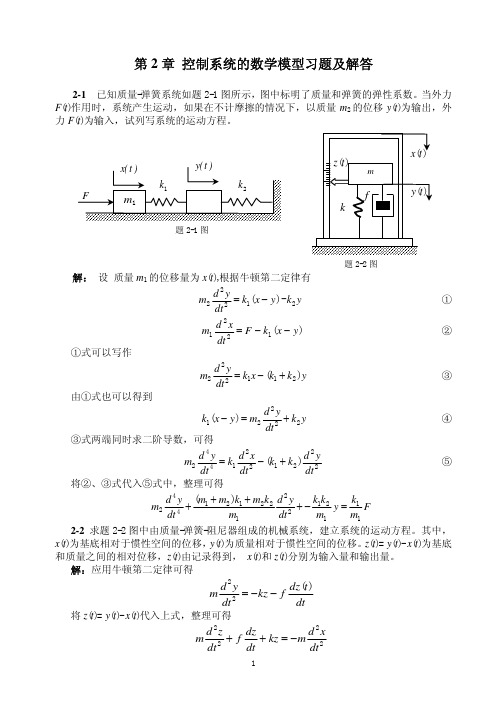
第2章 控制系统的数学模型习题及解答2-1 已知质量-弹簧系统如题2-1图所示,图中标明了质量和弹簧的弹性系数。
当外力F (t )作用时,系统产生运动,如果在不计摩擦的情况下,以质量m 2的位移y (t )为输出,外力F (t )为输入,试列写系统的运动方程。
解: 设 质量m 1的位移量为x (t ),根据牛顿第二定律有y k y x k dt yd m 21222-)(−= ①)(1221y x k F dtxd m −−= ②①式可以写作y k k x k dtyd m )(211222+−= ③由①式也可以得到y k dtyd m y x k 22221)(+=− ④③式两端同时求二阶导数,可得2221221442)(dty d k k dt x d k dt yd m +−= ⑤将②、③式代入⑤式中,整理可得F m k y m k k dty d m k m k m m dt y d m 1112122122121442)(=−++++ 2-2 求题2-2图中由质量-弹簧-阻尼器组成的机械系统,建立系统的运动方程。
其中,x (t )为基底相对于惯性空间的位移,y (t )为质量相对于惯性空间的位移。
z (t )= y (t )- x (t )为基底和质量之间的相对位移,z (t )由记录得到, x (t )和z (t )分别为输入量和输出量。
解:应用牛顿第二定律可得dtt dz f kz dt y d m )(22−−= 将z (t )= y (t )- x (t )代入上式,整理可得2222dtx d m kz dt dz f dt z d m −=++题2-2图题2-1图解:(a )引入中间变量u c (t)表示电容器两端的电压。
根据基尔霍夫电流定律有o c c u R u R dt du C2111=+ 根据基尔霍夫电压定律有o i c u u u −=联立消去中间变量,可得描述输入量u i (t )和输出量u o (t )之间关系的微分方程为i i o o u R dt du C u R R R R dt du C121211+=++ (b )引入回路电流i (t )和电容器两端的电压u c (t)作为中间变量,根据基尔霍夫电压定律有i o u u i R =+1 另有电容元件的元件约束关系方程dtdu Ci c =和i R u u o c 2−=联立求解,消去中间变量可得i i o o u R dt du C u R R R R dt du C121211+=++(c )设电容器C 2两端的电压为u c 2(t),根据基尔霍夫电流定律有dtduC u u R dt u u d C c o i o i 2211)(1)(=−+− ①求导可得22221221)(1)(dtu d C dt u u d R dt u u d C c o i o i =−+− ② 另有输出支路电压方程o c c u u dtdu C R =+2222 等式两边求导有dtdu dt du dt u d C R oc c =+222222 ③将①、②代入③式,整理可得i ii ooo u C R dt du C R C R C R dt u d C R u C R dt du C R C R C R C R dt u d C R 2121221121221212122112121122+++=++++2-4 试求题2-4图所示有源RC 电路的微分方程,其中u i (t )为输入量,u o (t )为输出量。
自动控制原理_王万良(课后答案2
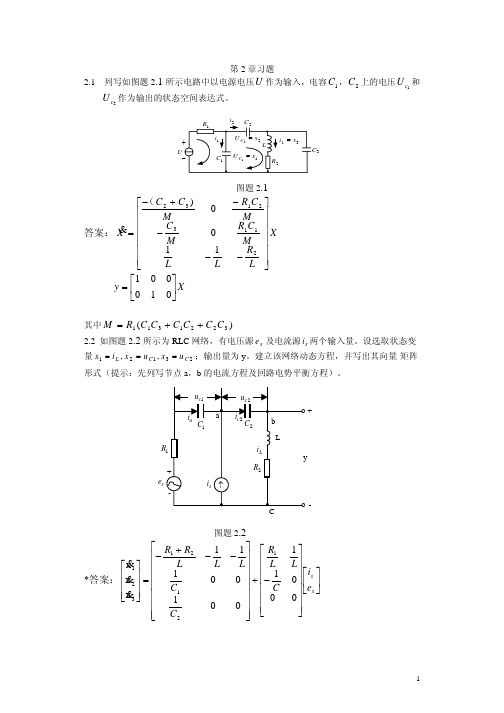
第2章习题2.1 列写如图题2.1所示电路中以电源电压U 作为输入,电容1C ,2C 上的电压1c U 和2c U 作为输出的状态空间表达式。
图题2.1答案:X L R LL M C R M C M C R M C C X ⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡−−−−+−=211321321100)(& X y ⎥⎦⎤⎢⎣⎡=010001其中)(3221311C C C C C C R M ++=2.2 如图题2.2所示为RLC 网络,有电压源s e 及电流源s i 两个输入量。
设选取状态变量23121,,C C L u x u x i x ===;输出量为y 。
建立该网络动态方程,并写出其向量-矩阵形式(提示:先列写节点a ,b 的电流方程及回路电势平衡方程)。
图题2.2*答案:⎥⎦⎤⎢⎣⎡⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡−+⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡−−+−=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡s s e i C L L R C C L L L RR 0001100100111x x x 12121321&&&U 3+-se[]111−−−=R y ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321x x x +[]⎥⎦⎤⎢⎣⎡s s e i R 11 2.3 列写图题2.3所示RLC 网络的微分方程。
其中,r u 为输入变量,c u 为输出变量图题2.3答案:r c cc u u dt du RC dtu d LC =++22 2.4 列写图题2.4所示RLC 网络的微分方程,其中r u 为输入变量,c u 为输出变量。
图题2.4答案:r c cc uu dt du R L dtu d LC =++22 2.5 图题2.5所示为一弹簧—质量—阻尼器系统,列写外力)(t F 与质量块位移)(t y 之间)(t图题2.5答案:)()()()(22t f t ky dt t dy f dtt y d m =++ 2.6 列写图题2.6所示电路的微分方程,并确定系统的传递函数,其中r u 为输入变量,cu 为输出变量。
自动控制原理C作业答案
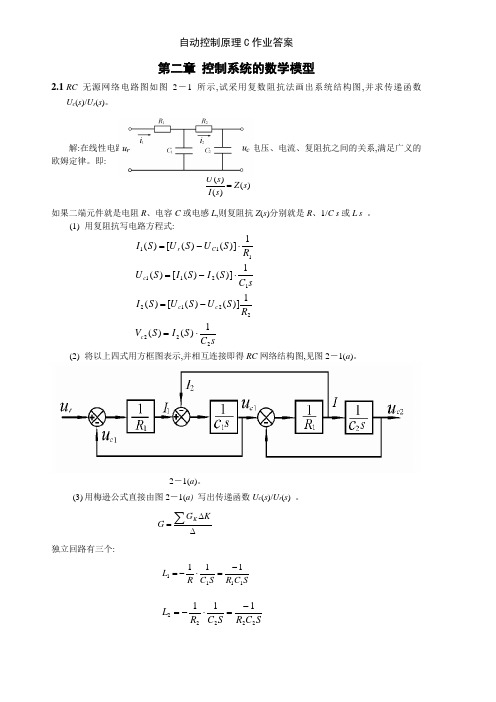
第二章控制系统的数学模型2.1RC无源网络电路图如图2-1所示,试采用复数阻抗法画出系统结构图,并求传递函数U c(s)/U r(s)。
图2-1解:在线性电路的计算中,引入了复阻抗的概念,则电压、电流、复阻抗之间的关系,满足广义的欧姆定律。
即:)()()(sZsIsU=如果二端元件就是电阻R、电容C或电感L,则复阻抗Z(s)分别就是R、1/C s或L s。
(1)用复阻抗写电路方程式:sCSISVRSUSUSIsCSISISURSUSUSIccccCr222221212111111)()(1)]()([)(1)]()([)(1)]()([)(⋅=-=⋅-=⋅-=(2)将以上四式用方框图表示,并相互连接即得RC网络结构图,见图2-1(a)。
2-1(a)。
(3)用梅逊公式直接由图2-1(a)写出传递函数U c(s)/U r(s) 。
∆∆=∑KGG K独立回路有三个:SCRSCRL1111111-=⋅-=SCRSCRL22222111-=⋅-=回路相互不接触的情况只有L 1与L 2两个回路。
则2221121121S C R C R L L L == 由上式可写出特征式为:222111222112132111111)(1S C R C R S C R S C R S C R L L L L L ++++=+++-=∆通向前路只有一条221212*********SC C R R S C R S C R G =⋅⋅⋅=由于G 1与所有回路L 1,L 2, L 3都有公共支路,属于相互有接触,则余子式为Δ1=1代入梅逊公式得传递函数1)(111111121221122121222111222112221111++++=++++=∆∆=s C R C R C R s C C R R s C R C R s C R s C R s C R s C R C R G G 2-2 已知系统结构图如图2-2所示,试用化简法求传递函数C (s )/R (s )。
自动控制原理第二章习题答案详解
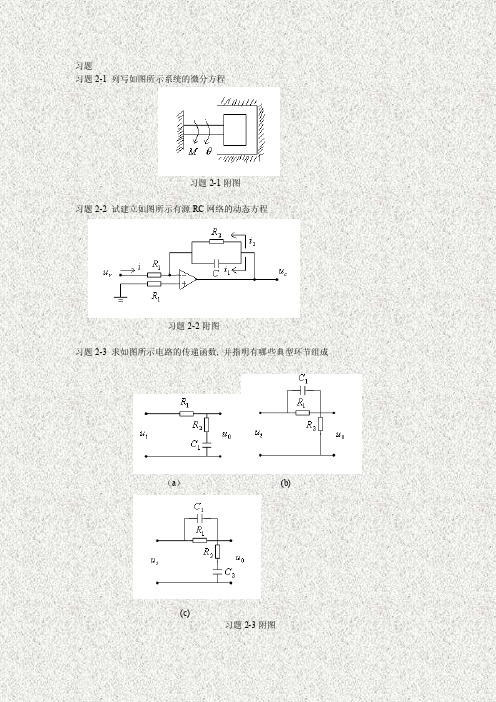
习题习题2-1 列写如图所示系统的微分方程习题2-1附图习题2-2 试建立如图所示有源RC网络的动态方程习题2-2附图习题2-3 求如图所示电路的传递函数, 并指明有哪些典型环节组成(a)(b)(c)习题2-3附图习题2-4 简化如图所示方块图, 并求出系统传递函数习题2-4附图习题2-5 绘制如下方块图的等效信号流图, 并求传递函数图(a)图(b)习题2-5附图习题2-6 系统微分方程组如下, 试建立对应信号流图, 并求传递函数。
),(d )(d )(),(d )(d ),()()()(),()(),(d )(d )(),()()(54435553422311121t y tt y T t x k t x k tt x t y k t x t x t x t x k t x t x k tt x t x t y t r t x +==--==+=-=τ习题2-7 利用梅逊公式直接求传递函数。
习题2-7附图习题2-8 求如图所示闭环传递函数, 并求(b)中)(s H x 的表达式, 使其与(a)等效。
图(a )图(b)习题2-8附图习题2-9 求如下各图的传递函数(a)(b)(c)习题2-9附图习题2-10 已知某些系统信号流图如图所示, 求对应方块图(a )(b)(c)(d)习题2-10附图习题答案习题2-1答案:解:设外加转矩M 为输入量,转角θ为输出量,转动惯量J 代表惯性负载,根据牛顿定律可得:θθθ1122d d d d k t f M tJ --=式中,1,1,k f 分别为粘性阻尼系数和扭转弹性系数,整理得:M k t f tJ =++θθθ1122d d d d习题2-2答案:解: 设r u 为输入量,c u 为输出量,,,,21i i i 为中间变量,根据运算放大器原理可得:1221d d R u i R u i t u c i r c c ===消去中间变量可得: r c c u R Ru t u C R 122d d -=+ 习题2-3答案: 解: (a)11111111221212211121121120++=+++=+++=+++=Ts Ts s R R R C R s C R R sC R sC R sC sC R R sC R u u i β其中:221121,R R R C R T +==β, 一阶微分环节,惯性环节.(b)21121212111221122011//1R R s C R R R s C R R R sC R R R sC R R u u i+++=++=+= 11111111212121221121111++=+∙++∙+=+++=Ts Ts s C R R R R s C R R R R R R s C R R s C R αα其中 α=+=21211,R R R T C R , 一阶微分环节,惯性环节.(c)s C R s C R s C R s C R s C R sC R R sC sC R u u i 21221122112211220)1)(1()1)(1(1//11+++++=+++= 由微分环节,二阶振荡环节组成。
《自动控制原理》---丁红主编---第二章习题答案

2-1(1)a.微分方程(2)a.线性定常2-2.方框、信号线、综合点、引出点2-3.变换变量关系保持不变。
2-4. 222222121)(nn n s s s T s T s G ωζωωζ++=++= 2-5. 输入信号)t (r 和输出信号)t (c 及其各阶导数在0t =时的值均为零。
2-6解:取分离体分析受力如图3-1-3所示。
依据牛顿定律可得()()()22)(dt t y d m a m t f t f t f K B =⋅=-- (1) 式中 K f ── 弹簧力;()t f B ── 阻尼力。
弹簧力与物体位移成正比,即)(t y K f K ⋅= (2)式中 K ── 弹簧刚度阻尼力与运动速度成正比,与运动方向相反,即()dtt dy B f B = (3) 式中 B ── 阻尼系数将式(2)和(3)代入(1)中,可得该系统的微分方程式:()()()()t f t Ky dt t dy B dt t y d m =++22 (4) 若令 K B T B =──时间常数;Km T m =──时间常数。
则(4)式可写成: ()()()()()t f K t f K t y dt t dy T dt t y d T a B m==++1222 式中 KK a 1=2-7. 解:(a );;;(b )2-8.543432143221432)1()()()(K K K K K K K s K K K s K s K K K s R s C +++++=τττ 2-9. (a ) 2423241321121413211)()(H G H G G G G G G G H G G G G G G G s R s C ++++++= (b ) HG G G G G G s R s C 2132211)()(++= 2-10. 22121211)()(H G H G G G G s R s C -+= 221212121)()(H G H G G G G G G s N s C c -+-=2-11.4232121213211)()(G H G G H G H G G G G G s R s C ++++= 2-12.(a ) bhdifjdifj bhfj bhdi bcdefk fj di bh abcdefg s R s C -++++++-=)()(1)()( (b ) 3431324321343136543211)1()()(H G G H G H G G G G H G G H G G G G G G G s R s C ++++++= 2-13解:前向通道:3211G G G P =, 412G G P =; 回路增益:1211H G G L -=, 2322H G G L -=,243H G L -=, 3214G G G L -=,415G G L -=;特征式:41321242321211G G G G G H G H G G H G G +++++=∆,11=∆,12=∆; 4132124232121413211)(G G G G G H G H G G H G G G G G G G s ++++++=Φ 2-14 解:前向通道:3211G G G P =,342G G P =;回路增益:213211H H G G G L -=,112H G L -=,233H G L -=,互不接触回路L2和L3特征式:2131112321321H H G G H G H G H H G G G 1++++=∆,11=∆,112H G 1+=∆;21311123213211143321H H G G H G H G H H G G G 1)H G 1(G G G G G )s (++++++=Φ2-15解:先将系统结构图化简为如下形式回路增益:33211H G G G L -=,222H G L -=,113H G L -=,特征式:112233211H G H G H G G G +++=∆ C(s)/R(s):前向通道:3211G G G P =,11=∆, M(s)/N(s): 前向通道:22G P =,12=∆ E(s)/R(s): 前向通道:13=P ,112231H G H G ++=∆ 112233213211H G H G H G G G G G G )s (C R +++=Φ 1122332121H G H G H G G G G )s (N M +++=Φ 11223321112211H G H G H G G G H G H G )s (ER +++++=Φ。
自控原理习题解答(第二章)
[答2 ( 31 ) 1 ) ] (t) x(t) (t) Tx T sx(s) x (s) 1 1 1 T x (s) 1 T s 1 s T 1 t 1 T 1 1 T x ( t ) L x (s) L e 1 s T T
答2 4(c)
e y (s) e x (s) C2 1 1 I(s) R 1 R2 C1s C 2s R 2 C 1 C 2 s 2 C 1s 1 R 2 C1 C 2 s C1 2 (R1 R 2 )C1C 2 s C 2 s C1s (R1 R 2 )C1C 2 s C 2 C1 R 2 C1 C 2 s C1 (R1 R 2 )C1C 2 s C 2 C1 (R1 R 2 )C1C 2 s C 2 C1 R 2 C1 C 2 C1 s K d Td s C 2 C1 C 2 C1 K (R1 R 2 )C1C 2 s (R1 R 2 )C1C 2 s Td s 1 T s 1 1 1 C 2 C1 C 2 C1 为实际微分环节 惯性环节 1 I(s) (R 2 ) C 2s
X(s) G1 G1 H3 H2 H1
-
Y(s) G2
G3
G4 X(s)
G1
-
-
G2 H3
-
Y(s) G3 G4
-
H2
G4 H3
1 2e 2t e t cos 3t 3s2 2s 8 8 A s 1 2 s(s 2)(s 2s 4) s 0 2 4 3s2 2s 8 B (s 2) 2 2 s(s 2)(s 2s 4) s 2
自动控制原理第二章课后习题答案(免费)
⾃动控制原理第⼆章课后习题答案(免费)⾃动控制原理第⼆章课后习题答案(免费)离散系统作业注明:*为选做题2-1 试求下列函数的Z 变换(1)()E z L =();n e t a = 解:01()[()]1k k k z E z L e t a z z z aa∞-=====--∑ (2) ();at e t e -= 解:12211()[()][]1...1atakT k aT aT aTaT k z E z L e t L ee z e z e z z e e z∞----------=====+++==--∑2-2 试求下列函数的终值:(1)112();(1)Tz E z z --=-解: 11111()(1)()1lim lim lim t z z Tz f t z E z z---→∞→→=-==∞- (2)2()(0.8)(0.1)z E z z z =--。
解:211(1)()(1)()0(0.8)(0.1)lim lim lim t z z z z f t z E z z z →∞→→-=-==--2-3* 已知()(())E z L e t =,试证明下列关系成⽴:(1)[()][];n z L a e t E a=证明:()()nn E z e nT z∞-==∑00()()()()[()]n n n n n n z z E e nT e nT a z L a e t a a ∞∞--=====∑∑ (2)()[()];dE z L te t TzT dz=-为采样周期。
证明:11100[()]()()()()()()()()()nn n n n n n n n n L te t nT e nT zTz ne nT z dE z de nT z dz dz e nT n zne nT z ∞∞---==∞-=∞∞----======-=-∑∑∑∑∑所以:()[()]dE z L te t Tzdz=- 2-4 试求下图闭环离散系统的脉冲传递函数()z Φ或输出z 变换()C z 。
自动控制原理第2章课后习题及解答
+
1 C2R2
uc
=
du
2 r
dt 2
+
2 CR
dur dt
+
1 C2R2
ur
(c) 由图解 2-2(c)可写出
Ur (= s) R1 [I1(s) + I2 (s)] + (Ls + R2 )I2 (s) (6)
1 Cs
I1
(s)
=
(Ls
+
R2
)I2
(s)
(7)
U c (s) = R2 I 2 (s)
第 2 章习题及解答
2-1 建立图 2-32 所示各机械系统的微分方程(其中 F (t) 为外力,x(t) 、y(t) 为位移; k 为弹性系数, f 为阻尼系数, m 为质量;忽略重力影响及滑块与地面的摩擦)。
图 2-32 系统原理图
解. (a)以平衡状态为基点,对质块 m 进行受力分析(不再
考虑重力影响),如图解 2-1(a)所示。根据牛顿定理可写出
2
2
X (s=)
e−s s2
(s
+
1) 2
−
e−3s s2
(2s
+
1) 2
(c) x(t) = a + (b − a)(t − t1 ) − (b − c)(t − t2 ) − c(t − t3 ) X (s) = 1 [a + (b − a)e−t1s − (b − c)e−t2s − ce−t3s ] s
k1k 2
k1 k2 k1
图解 2-3(a)
(b) 由图可写出
Uc (s) =
Ur (s)
R2
自动控制原理第二版课后答案第二章精选全文完整版
x kx ,简记为
y kx 。
若非线性函数有两个自变量,如 z f (x, y) ,则在
平衡点处可展成(忽略高次项)
f
f
z xv
|( x0 , y0 )
x y |(x0 , y0 )
y
经过上述线性化后,就把非线性关系变成了线性 关系,从而使问题大大简化。但对于如图(d)所示的 强非线性,只能采用第七章的非线性理论来分析。对于 线性系统,可采用叠加原理来分析系统。
Eb (s) Kbsm (s)
Js2 m(s) Mm fsm(s)
c
(s)
1
i
m
(s)
45
系统各元部件的动态结构图
传递函数是在零初始条件下建立的,因此,它只 是系统的零状态模型,有一定的局限性,但它有现 实意义,而且容易实现。
26
三、典型元器件的传递函数
1. 电位器
1 2
max
E
Θs
U s
K
U
K E
max
27
2. 电位器电桥
1
2
E
K1p1
K1 p 2
U
Θ 1
s
Θ
K1 p
Θ 2
s
U s
28
3.齿轮
传动比 i N2 N1
G2(s)
两个或两个以上的方框,具有同一个输入信号,并 以各方框输出信号的代数和作为输出信号,这种形
式的连接称为并联连接。
41
3. 反馈连接
R(s)
-
C(s) G(s)
H(s)
一个方框的输出信号输入到另一个方框后,得 到的输出再返回到这个方框的输入端,构成输 入信号的一部分。这种连接形式称为反馈连接。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
从输入R到输出C的前向通路共有4条,其前向通路总增益以及余因子式分别为
因此,传递函数为
2-5试简化图2-5中的系统结构图,并求传递函数C(s)/R(s )与C(s)/N(s)。
图2-5
解:仅考虑输入R(S)作用系统时,单独回路2个,即
两个互不接触的回路没有,于就是,得特征式为
从输入R到输出C的前向通路共有1条,其前向通路总增益以及余因子式分别为
第二章控制系统的数学模型
2.1RC无源网络电路图如图2-1所示,试采用复数阻抗法画出系统结构图,并求传递函数Uc(s)/Ur(s)。
图2-1
解:在线性电路的计算中,引入了复阻抗的概念,则电压、电流、复阻抗之间的关系,满足广义的欧姆定律。即:
如果二端元件就是电阻R、电容C或电感L,则复阻抗Z(s)分别就是R、1/Cs或Ls。
低频段 ,斜率-20db/dec,延长线过1,2log10点,过 =0、2后,斜率为-40db/dec,过 =10后,斜率为-60db/dec
确定系统的截止频率 C与相角裕度。
确定系统的截止频率 C:
通过作图可以瞧出截止频率在1与2之间,在通过试根的方法确定稍精确的值为1、4
确定系统的相角裕度:
=1800+ =1800-900-arctan5 -arctan0、1 =900-81、880-7、970=0、150
5、4某位置控制系统的结构如图1。试绘制系统开环的伯德图,并确定系统的相位稳定裕量。
, =4, =10
低频段 ,斜率-20db/dec,过1,2log10点,过 =4后,斜率为-40db/dec,过 =10后,斜率为-60db/dec
终点: ,
(2)求幅相曲线与负实轴的交点
,
P=0,N-=1, N+=0,R=2(N+-N-)=-2,Z=P-2N=2
由奈氏判据知,闭环系统就是不稳定的。
5、3已知一单位负反馈系统开环传递函数
作系统开环对数幅频L(),有简要的计算说明画图过程,并确定系统的截止频率 C与相角裕度。
, =0、2, =10
两个互不接触的回路,于就是,得特征式为
从输入R到输出C的前向通路共有1条,其前向通路总增益以及余因子式分别为
因此,传递函数为
E(s)/R(s):单独回路3个,即
两个互不接触的回路,于就是,得特征式为
从输入R到输出E的前向通路共有2条,其前向通路总增益以及余因子式分别为
因此,传递函为
第三章线性系统的时域分析法
解:
(1)确定起点与终点
,故初始相角为-90,
终点: ,
(2)求幅相曲线与负实轴的交点
,
P=0,N-=1, N+=0,R=2(N+-N-)=-2,Z=P-2N=2
由奈氏判据知,闭环系统就是不稳定的。
5、2已知系统的开环传函用奈氏判据(画出奈氏曲线)判别闭环系统的稳定性。
解:
(1)确定起点与终点
,故初始相角为-180,
解本例就是应用劳斯判据判断系统稳定性的一种特殊情况。如果在劳斯行列表中某一行的第一列项等于零,但其余各项不等于零或没有,这时可用一个很小的正数ε来代替为零的一项,从而可使劳斯行列表继续算下去。
劳斯行列式为
由劳斯行列表可见,第三行第一列系数为零,可用一个很小的正数ε来代替;第四行第一列系数为(2ε+2/ε,当ε趋于零时为正数;第五行第一列系数为(-4ε-4-5ε2)/(2ε+2),当ε趋于零时为 。由于第一列变号两次,故有两个根在右半s平面,所以系统就是不稳定的。
因此,传递函数为
仅考虑输入N(S)作用系统时,单独回路2个,即
两个互不接触的回路没有,于就是,得特征式为
从输入N到输出C的前向通路共有2条,其前向通路总增益以及余因子式分别为
因此,传递函数为
2-6用梅逊增益公式求传递函数C(s)/R(s)与E(s)/R(s)。
图2-6
解:C(s)/R(s):单独回路3个,即
3-1设二阶控制系统的单位阶跃响应曲线如图3-1所示。试确定系统的传递函数。
图3-1二阶控制系统的单位阶跃响应
解在单位阶跃作用下响应的稳态值为3,故此系统的增益不就是1,而就是3。系统模型为
然后由响应的 、 及相应公式,即可换算出 、 。
(s)
由公式得
换算求解得: 、
3-2设系统如图3-2所示。如果要求系统的超调量等于 ,峰值时间等于0、8s,试确定增益K1与速度反馈系数Kt。同时,确定在此K1与Kt数值下系统的延迟时间、上升时间与调节时间。
图3-2
解由图示得闭环特征方程为
即
,
由已知条件
解得
于就是
3-3已知系统特征方程式为 试用劳斯判据判断系统的稳定情况。
解劳斯表为
1 18
8 16
由于特征方程式中所有系数均为正值,且劳斯行列表左端第一列的所有项均具有正号,满足系统稳定的充分与必要条件,所以系统就是稳定的。
3-4已知系统特征方程为 试判断系统稳定性。
(1)用复阻抗写电路方程式:
(2)将以上四式用方框图表示,并相互连接即得RC网络结构图,见图2-1(a)。
2-1(a)。
(3)用梅逊公式直接由图2-1(a)写出传递函数Uc(s)/Ur(s)。
独立回路有三个:
回路相互不接触的情况只有L1与L2两个回路。则
由上式可写出特征式为:
通向前路只有一条
由于G1与所有回路L1,L2,L3都有公共支路,属于相互有接触,则余子式为
Δ1=1
代入梅逊公式得传递函数
2-2已知系统结构图如图2-2所示,试用化简法求传递函数C(s)/R(s)。
图2-2
解:(1)首先将含有G2的前向通路上的分支点前移,移到下面的回环之外。如图2-2(a)所示。
(2)将反馈环与并连部分用代数方法化简,得图2-2(b)。
(3)最后将两个方框串联相乘得图2-2(c)。
图2-2系统结构图的简化
2、3化简动态结构图,求C(s)/R(s)
图2-3
解:单独回路1个,即
两个互不接触的回路没有
于就是,得特征式为
从输入R到输出C的前向通路共有2条,其前向通路传递函数以及余因子式分别为
因此,传递函数为
2、4用梅森公式求系统传递函数。
图2-4
解:单独回路5个,即
两个互不接触的回路没有
3、5
解;在求解系统的稳态误差前必须判定系统就是否稳定;
系统特征方程为 由劳斯判据判断
劳斯行列式为
由于特征方程式中所有系数均为正值,且劳斯行列表左端第一列的所有项均具有正号,满足系统稳定的充分与必要条件,所以系统就是稳定的。
可知v=1,K=10
当,
当
第五章线性系统的频域分析法
5、1已知系统的开环传函 ,用奈氏判据(画出奈氏曲线)判别闭环系统的稳定性。