自动控制原理 第二章作业
自动控制原理 习题解答
(1)
s 2C(s) − sc(0) − c&(0) + 3sC(s) − 3c(0) + 2C(s) = 2R(s) (2)
将初始条件代入(2)式得
(s 2 + 3s + 2)C(s) + s + 3 = 2 1 s
即: C(s) = 2 − s 2 − 3s = 2 − 2s + 6 = 1 − 4 + 2 s(s 2 + 3s + 2) s s 2 + 3s + 2 s s + 1 s + 2
iC1
=
C1
duC1 dt
(2)
iC 2
=
uC1
+ iC1R R
+
iC1
= uC1 R
+ 2iC1
= C2
duC 2 dt
= C2
d (u0 − iC1R) dt
(3)
4
胡寿松自动控制原理习题解答第二章
即:
uC1 R
+
2iC1
=
C2
d (u0
− iC1R) dt
(4)
将(1)(2)代入(4)得:
ui
解:系统结构图及微分方程得:
− u0 R
+ 2C1
d (ui − u0 ) dt
= C2
du0 dt
−
C1C2
R
d 2uC1 dt 2
即: ui R
− u0 R
+ 2C1
dui dt
− 2C1
du0 dt
= C2
du0 dt
−
C1C2
R
自动控制原理习题及其解答 第二章
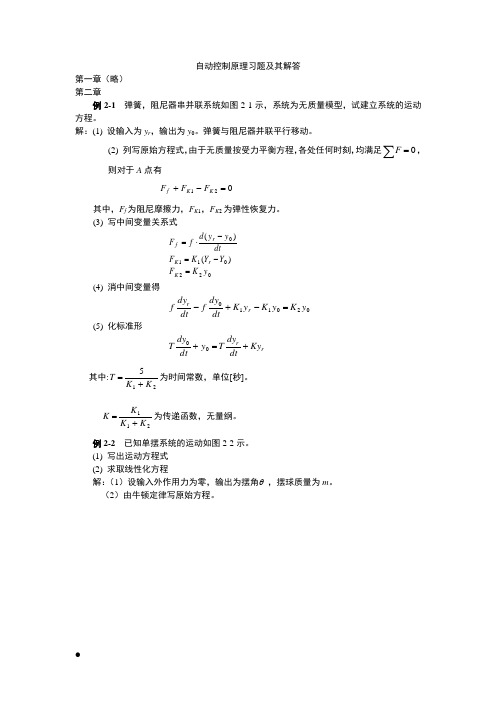
自动控制原理习题及其解答第一章(略) 第二章例2-1 弹簧,阻尼器串并联系统如图2-1示,系统为无质量模型,试建立系统的运动方程。
解:(1) 设输入为y r ,输出为y 0。
弹簧与阻尼器并联平行移动。
(2) 列写原始方程式,由于无质量按受力平衡方程,各处任何时刻,均满足∑=0F ,则对于A 点有021=-+K K f F F F其中,F f 为阻尼摩擦力,F K 1,F K 2为弹性恢复力。
(3) 写中间变量关系式220110)()(y K F Y Y K F dty y d f F K r K r f =-=-⋅=(4) 消中间变量得 020110y K y K y K dtdy f dt dy f r r=-+- (5) 化标准形 r r Ky dtdyT y dt dy T +=+00 其中:215K K T +=为时间常数,单位[秒]。
211K K K K +=为传递函数,无量纲。
例2-2 已知单摆系统的运动如图2-2示。
(1) 写出运动方程式 (2) 求取线性化方程 解:(1)设输入外作用力为零,输出为摆角θ ,摆球质量为m 。
(2)由牛顿定律写原始方程。
h mg dtd l m --=θθsin )(22其中,l 为摆长,l θ 为运动弧长,h 为空气阻力。
(3)写中间变量关系式)(dtd lh θα= 式中,α为空气阻力系数dtd l θ为运动线速度。
(4)消中间变量得运动方程式0s i n 22=++θθθmg dt d al dtd ml (2-1) 此方程为二阶非线性齐次方程。
(5)线性化由前可知,在θ =0的附近,非线性函数sin θ ≈θ ,故代入式(2-1)可得线性化方程为022=++θθθmg dt d al dtd ml 例2-3 已知机械旋转系统如图2-3所示,试列出系统运动方程。
解:(1)设输入量作用力矩M f ,输出为旋转角速度ω 。
(2)列写运动方程式f M f dtd J+-=ωω式中, f ω为阻尼力矩,其大小与转速成正比。
自动控制原理课后习题答案第二章

第 二 章2-3试证明图2-5(a)的电网络与(b)的机械系统有相同的数学模型。
分析 首先需要对两个不同的系统分别求解各自的微分表达式,然后两者进行对比,找出两者之间系数的对应关系。
对于电网络,在求微分方程时,关键就是将元件利用复阻抗表示,然后利用电压、电阻和电流之间的关系推导系统的传递函数,然后变换成微分方程的形式,对于机械系统,关键就是系统的力学分析,然后利用牛顿定律列出系统的方程,最后联立求微分方程。
证明:(a)根据复阻抗概念可得:2221212112212211212112212122111()1()111oiR u C s R R C C s R C R C R C s R u R R C C s R C R C R C C sR C s R C s+++++==+++++++即220012121122121212112222()()i i o id u du d u duR R C C R C R C R C u R R C C R C R C u dt dt dt dt++++=+++取A 、B 两点进行受力分析,可得:o 112()()()i o i o dx dx dx dx f K x x f dt dt dt dt -+-=- o 22()dx dxf K x dt dt -= 整理可得:2212111221121212211222()()o o i i o id x dx d x dx f f f K f K f K K K x f f f K f K K K x dt dt dt dt ++++=+++经比较可以看出,电网络(a )和机械系统(b )两者参数的相似关系为1112221211,,,K f R K f R C C2-5 设初始条件均为零,试用拉氏变换法求解下列微分方程式,并概略绘制x(t)曲线,指出各方程式的模态。
(1) ;)()(2t t x t x =+(2))。
自动控制原理C作业(第二章)答案
4 3
0.1
图 3-1 二阶控制系统的单位阶跃响应
解 在单位阶跃作用下响应的稳态值为 3,故此系统的增益不是 1,而是 3。系统模型为
(s)
s2
3
2 n
2n s
2 n
然后由响应的 p % 、 t p 及相应公式,即可换算出 、 n 。
p%
c(t p ) c() c()
4
3
3
33%
t p 0.1(s)
P1 G1G2
1 1
P2 G2G4
2 1
因此,传递函数为
C(s) P11 P2 2
R(s)
G2G1 G4G2 1 G1G2G3
3
自动控制原理 C 习题答案(第二章)
2.4 用梅森公式求系统传递函数。
R(S)
-
_
+ G1(s)
- _
G2(s)
+ C(S)
+
图 2-4 解: 单独回路 5 个,即
L1
1 R
1 C1S
1 R1C1S
11
1
L2
R2
C2S
R2C2 S
L3
1 C1S
1 R2
1 R2C1S
回路相互不接触的情况只有 L1 和 L2 两个回路。则
L12
L1L2
1 R1C1R2C2S 2
由上式可写出特征式为:
1
( L1
L2
L3 )
L1 L2
1
1 R1C1S
1 R2C2 S
1 R2C1S
1 R1C1R2C2S 2
益 K1 和速度反馈系数 Kt 。同时,确定在此 K1 和 Kt 数值下系统的延迟时间、上升时间和调节时间。
自动控制原理简明教程第二版2.第二章习题答案
P
1
n k 1
pk k
P11 P22
G6
1
G1G2G3G4G5 G2G3H2 G3H1
G3G4
H3
2-15(c) 试用梅森公式求下图的传递函数C(s)/R(s).
梅森公式求得的传递函数:
P
ed(1 bg) abcd
1 (af bg ch ehgf ) afch
(3) 代入初始条件,得到输出量的拉氏形式:
d 2c(t) 3 dc(t) 2c(t) 2r(t)
dt 2
dt
s2C(s) sc(0) c(0) 3{sC(s) c(0)} 2C(s) 2R(s)
s2C(s) s 3sC(s) 3 2C(s) 2 s
与前向通路的P1(增益=ed)对应的余子式Δ1?
1 1 bg
与前向通路的P1(增益=abcd)对应的余子式Δ2?
梅森公式求得的传递函数:
2 1
P
1
n k 1
pk k
P11 P22
1 (af
ed(1 bg) abcd bg ch ehgf ) afch
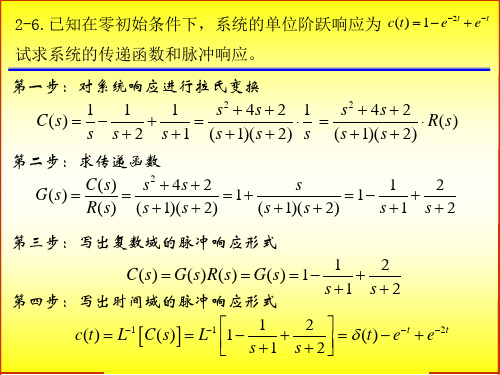
2-6.已知在零初始条件下,系统的单位阶跃响应为 c(t) 1 e2t et
试求系统的传递函数和脉冲响应。
第一步:对系统响应进行拉氏变换
C(s) 1 1 1 s2 4s 2 1 s2 4s 2 R(s) s s 2 s 1 (s 1)(s 2) s (s 1)(s 2)
3 1
(s)
1
n k 1
自动控制原理作业题(后附答案)
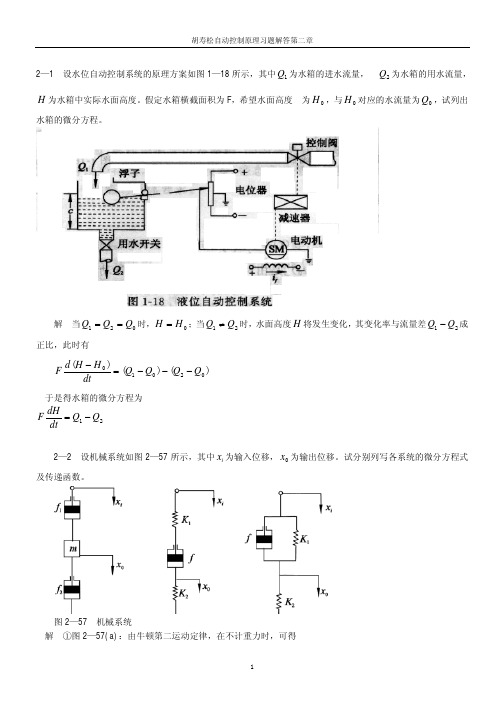
自动控制原理作业题(后附答案)-标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII自动控制原理作业题第一章基本概念一、简答题1 简述自动控制的基本概念2 简述自动控制系统的基本组成3 简述控制系统的基本控制过程4 简述自动控制系统的基本分类5 试比较开环控制和闭环控制的特点6 简述自动控制系统的性能评价指标二、分析计算题1 液位自动控制系统如图所示。
试分析该系统工作原理,画出系统原理框图,指出被控对象、被控参量和控制量2 发动机电压调节系统如图所示,试分析其工作原理,画出系统原理框图,指出其特点。
3液面控制系统如图所示。
试分析该系统的工作原理,指出系统中的干扰量、被控制量及被控制对象,并画出系统的方框图。
4控制系统如图所示。
简述该系统的工作原理,说明该系统的给定值、被控制量和干扰量,并画出该系统的方块图。
图1-7发电机-电动机调速系统操纵电位计发电机伺服电机减速器负载Θr给定值Ur 前置放大器功放执行元件被控量Wm这是一个开环控制的例子+E-EUr操纵电位计R1R2R3R4放大器直流发电机伺服电机Wd Wm发电机-电动机调速系统减速器负载5火炮随动控制系统如图所示。
简述该系统的工作原理,并画出该系统的原理框图。
第二章 线性控制系统的数学模型一、简答题1 简述建立控制系统数学模型的方法及其数学表示形式2 简述建立微分方程的步骤3 简述传递函数的基本概念及其特点4 给出组成控制系统典型基本环节二、分析计算题1 有源电网络如图所示,输入量为)(1t u ,输出量为)(2t u ,试确定该电网络的传递函数2 电枢控制式直流电动机原理图如图所示,输入量为)(1t e ,输出量为)(t o θ,试确定其微分方程。
图中,电动机电枢输入电压;电动机输出转角;电枢绕组的电阻;电枢绕组的电感;流过电枢绕组的电流;电动机感应电势;电动机转矩;电动机及负载这和到电动机轴上的转动惯量;电动机及负载这和到电动机轴上的粘性摩擦系数。
自动控制原理第2章练习题
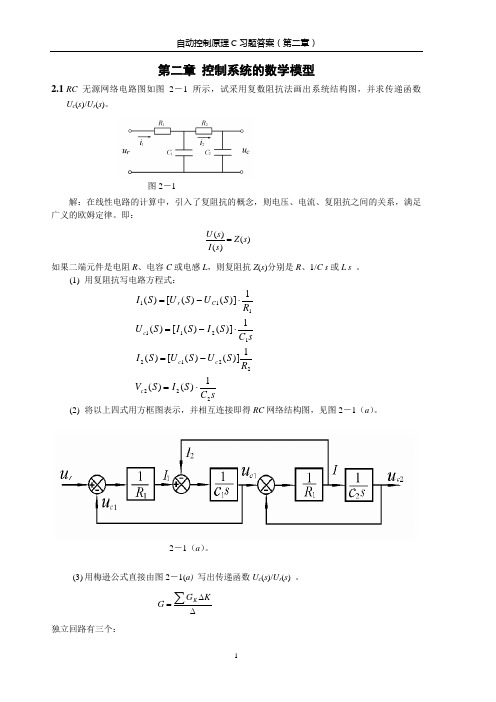
第二章 控制系统的数学模型习题及答案2-1 试建立图2-27所示各系统的微分方程。
其中外力)(t F ,位移)(t x 和电压)(t u r 为输入量;位移)(t y 和电压)(t u c 为输出量;k (弹性系数),f (阻尼系数),R (电阻),C (电容)和m (质量)均为常数。
解(a )以平衡状态为基点,对质块m 进行受力分析(不再考虑重力影响),如图解2-1(a)所示。
根据牛顿定理可写出22)()(dty d m dt dy f t ky t F =-- 整理得)(1)()()(22t F m t y m k dt t dy m f dt t y d =++(b )如图解2-1(b)所示,取A,B 两点分别进行受力分析。
对A 点有 )()(111dtdydt dx f x x k -=- (1) 对B 点有 y k dtdydt dx f 21)(=- (2) 联立式(1)、(2)可得:dtdx k k k y k k f k k dt dy2112121)(+=++(c) 应用复数阻抗概念可写出)()(11)(11s U s I cs R cs R s U c r ++= (3) 2)()(R s Uc s I = (4) 联立式(3)、(4),可解得: CsR R R R Cs R R s U s U r c 212112)1()()(+++=微分方程为: r r c c u CR dt du u R CR R R dt du 121211+=++(d) 由图解2-1(d )可写出[]Css I s I s I R s U c R R r 1)()()()(++= (5) )()(1)(s RI s RI Css I c R c -= (6) []Css I s I R s I s U c R c c 1)()()()(++= (7)联立式(5)、(6)、(7),消去中间变量)(s I C 和)(s I R ,可得:1312)()(222222++++=RCs s C R RCs s C R s U s U r c 微分方程为 r r r c c c u RC dt du CR dt du u R C dt du CR dt du 222222221213++=++2-2 试证明图2-28中所示的力学系统(a)和电路系统(b)是相似系统(即有相同形式的数学模型)。
自动控制原理课后习题答案第二章
解:由图可得
联立上式消去中间变量U1与U2,可得:
2-8某位置随动系统原理方块图如图2-7所示。已知电位器最大工作角度,功率放大级放大系数为K3,要求:
(1) 分别求出电位器传递系数K0、第一级与第二级放大器得比例系数K1与K2;
(2) 画出系统结构图;
(3) 简化结构图,求系统传递函数。
证明:(a)根据复阻抗概念可得:
即 取A、B两点进行受力分析,可得:
整理可得:
经比较可以瞧出,电网络(a)与机械系统(b)两者参数得相似关系为
2-5 设初始条件均为零,试用拉氏变换法求解下列微分方程式,并概略绘制x(t)曲线,指出各方程式得模态。
(1)
(2)
2-7由运算放大器组成得控制系统模拟电路如图2-6所示,试求闭环传递函数Uc(s)/Ur(s)。
2-10试简化图2-9中得系统结构图,并求传递函数C(s)/R(s )与C(s)/N(s)。
图2-9 题2-10系统结构图
分析:分别假定R(s)=0与N(s)=0,画出各自得结构图,然后对系统结构图进行等效ቤተ መጻሕፍቲ ባይዱ换,将其化成最简单得形式,从而求解系统得传递函数。
解:(a)令N(s)=0,简化结构图如图所示:
可求出:
令R(s)=0,简化结构图如图所示:
所以:
(b)令N(s)=0,简化结构图如下图所示:
所以:
令R(s)=0,简化结构图如下图所示:
2-12 试用梅逊增益公式求图2-8中各系统信号流图得传递函 数C(s)/R(s)。
图2-11 题2-12系统信号流图
解:
(a)存在三个回路:
存在两条前向通路:
所以:
(3)简化后可得系统得传递函数为
自动控制原理第二章课后习题答案(免费)
自动控制原理第二章课后习题答案(免费)离散系统作业注明:*为选做题2-1 试求下列函数的Z 变换 (1)()E z L =();n e t a = 解:01()[()]1k k k z E z L e t a z z z aa∞-=====--∑ (2) ();at e t e -= 解:12211()[()][]1...1atakT k aT aT aTaT k z E z L e t L ee z e z e z z e e z∞----------=====+++==--∑2-2 试求下列函数的终值:(1)112();(1)Tz E z z --=-解: 11111()(1)()1lim lim lim t z z Tz f t z E z z---→∞→→=-==∞- (2)2()(0.8)(0.1)z E z z z =--。
解:211(1)()(1)()0(0.8)(0.1)lim lim limt z z z z f t z E z z z →∞→→-=-==-- 2-3* 已知()(())E z L e t =,试证明下列关系成立:(1)[()][];n z L a e t E a =证明:0()()nn E z e nT z∞-==∑00()()()()[()]n n n n n n z z E e nT e nT a z L a e t a a ∞∞--=====∑∑ (2)()[()];dE z L te t TzT dz=-为采样周期。
证明:11100[()]()()()()()()()()()nn n n n n n n n n L te t nT e nT zTz ne nT z dE z de nT z dz dz e nT n zne nT z ∞∞---==∞-=∞∞----======-=-∑∑∑∑∑所以:()[()]dE z L te t Tzdz=- 2-4 试求下图闭环离散系统的脉冲传递函数()z Φ或输出z 变换()C z 。
自动控制原理课后习题答案
R1R2C1C2d2du22(tt)(R1C1R2C2R1C2)dd2u(tt)u2(t) v(t)
R1C1ddV (tt)V(t)
输入
(b) 以电压u3(t)为输出量,列写微分方程为:
u1(t)
C1
R1 R2
C2
R1R2C 1C2d2d u32(tt)(R1C 1R2C2)dd3u (t)t(R1C21)u3(t)
y=x3+x4=G2x2+G4x2=(G2+G4)G1x1
y=(G2+G4)G1x1
G(s)=Y(s)/U(s)=(G2+G4)G1/(1+G3G2G1)
作业:2.59题 把图2.75改画为信号流图,并用Mason公式求u到y传递函数
方框图
u(S)
__
G1(s)
G5(s)
—
y(S)
G2(s)
—
G3(s)
essfls i0m se(s)1K K21K2
(b)当r(t)=1(t),f(t)=1(t)时的ess。 解:求输入误差传递函数,直接代数计算法:
根据电路定律写出单体微分方程式(2.2.2)和 (2.2.3)。把特征受控量uc(t)选作输出量,依 据式(2.2.2)和(2.2.3),消除中间量i(t) , 则可得到输入输出微分方程(2.2.4)。
3、利用Laplace变换求出传递函数
R
L
+
+
u(t) i(t)
输入
_
+ uc(t) _
y
输出
_
U(t)Ld dtiR i uC
自动控制原理课后习题答案
第二章作业 概念题:传递函数定义:
单输入输出线性定常系统的传递函数,定义为零初始条件下,系统输出 量的拉氏变换像函数与输入量的拉氏变换像函数之比。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程名称:自动控制原理
指导教师:赵舵 课程时间:2011 作业编号:No.2
课程编号:324398
作业发布时间:2011.03.17 作业提交时间:2011.03.24
注意:1、请在作业本封面注明姓名、学号、专业、班级; 2、请在每次提交作业的首页注明完成作业所需的时间; 题目: 1、系统方框图如图所示,计算传递函数 T(s)=Y(s)/R(s);
Hale Waihona Puke 系统的状态空间模型。8、 (选作)在教务网下载 Cruise Control 系统的 Maltab 模型,运行 Cruise Control
系统的四类仿真模型,并尝试观察并简述开环和闭环控制系统的区别及其特点。 对于第四类模型, 尝试将系统原有的比例—积分 (PI) 控制器更换为比例控制器, 调节比例环节系数大小,观察系统输出。
4、假设以下两个系统的状态微分方程分别为:
1 0 0 0 1 4 0 x x 0 1 x 0 u , (2) (1) 3 8 14 7 2 y 20 y 1 0 0x 1 1 0 3 0 x 0 u , 1 10 1 30 10x
2 、 假 设 如 图 所 示 运 算 放 大 器 是 理 想 的 , 各 个 参 数 取 值 为 C=1F,R1=167k,R2=240k,R3=1k, R4=100k ,试计算运算放大器电路的传 递函数 G(s)=Vo(s)/V(s);
3、系统方框图如下图所示,如果输入 R(s)=0,请确定 D(s)作用下系统闭环传递 函数 T ( s) Y ( s ) / D( s ) ;
0 5 1 x x u, 0 0 0
确定其状态转移矩阵 (t ) ,如果系统状态变量的初始值为 x1 (0) 1, x2 (0) 1 ,请 确定系统在零输入条件下,状态量的时间响应 x1 (t ), x2 (t ) 。
7、已知系统的闭环传递函数如下图所示,如果不考虑干扰 D(s)的作用请确定该
试计算上述系统的传递函数 G1(s), G2(s);
5、假设以下两个系统的传递函数分别为:
8 s 7 s 14s 8 8( s 5) (2)G ( s) 3 s 12s 2 44s 48 (1)G ( s )
3 2
试写出上述系统的状态空间模型;
6、假设一个系统的状态空间模型为: