基于感知机
一种基于L2范数的软核感知机

Ab ta t T e p r e to cn o l ov l e r sp a l po lms h o I ot mag n lo t ms n VMs a c a g sr c : h ec pr n a ny s le i al e a b e rbe T e L2 S I s f n y r n r i ag r h i S i c n h n e
线性 可分 1题。 " 3 通过使 用核技巧 , 得到一种普适的非线性 分类方法。实际数据库 的测试 结果表明 .K S P算法能够有 效地 解决非线性
问题 , 且 继承 了感 知 机 运 算 简 单速 度 快 的优 点。 并
关键 词: 感知 机 ; 函 数 ; 核 线性 可 分 ; 性 不 可 分 ;2 线 £ 范数 文章 编 号 :0 2 8 3 ( 0 7 0 — 0 10 文 献 标 识 码 : 10 - 3 12 0 )2 09 —4 A 中图 分 类 号 : P 8 r 1 r
的元件 , 首次提出 了神经元 的数 学模 型 。 称 M 简 P模型[ 1 】 项 。这
.
e c ie l n e aa l rb e it e aa l n .a e n t i fc , rp s otKen l ecpmn( KP)i ems o a h l a y isp be po lm no a sp be o eB s d o hs a twe po o e a S f nr r r re P re t S n tr f
1 引 言
14 9 3年 。 C l c Mc ul h和 Pt 将 神 经 元 看 成 一 个 二进 制 阈 值 o is t
简述感知机的数据模型 -回复

简述感知机的数据模型-回复感知机的数据模型是一种二分类的线性分类模型。
它基于感知机学习算法,通过不断调整参数,使得模型能够准确地将样本分为两个类别。
感知机数据模型是机器学习中最简单的模型之一,它的原理简单易懂,并且具有快速训练和良好的分类性能的特点。
感知机的数据模型可以表示为如下形式:f(x) = sign(w∙x + b)其中,f(x)表示感知机模型的输出结果,x表示输入样本向量,w表示权重向量,b表示偏置。
w∙x表示两个向量的点积,sign函数表示符号函数,即将结果大于0的标记为+1,小于0的标记为-1。
感知机的数据模型使用线性分类器,即通过一个超平面来划分两个不同类别的样本。
超平面是一个n维空间中的(n-1)维子空间,对于二维空间来说,超平面即为一条直线。
感知机的目标是找到一个超平面,使得在该超平面上方的样本点被划分为一类,而在超平面下方的样本点被划分为另一类。
感知机的学习过程可以简述为以下步骤:1. 初始化参数:初始化权重向量w和偏置b,通常可以使用随机数来进行初始化。
2. 遍历训练集:对于给定的训练样本,计算预测值f(x)。
3. 更新参数:根据预测值和真实标签之间的差异,通过梯度下降法来更新参数。
具体地,当f(x)和真实标签相等时,参数不做任何改变;当f(x)和真实标签不相等时,按照一定的学习率更新参数。
4. 重复步骤2和3,直到训练集中的所有样本都被正确分类或达到停止条件。
感知机的学习算法是一种迭代的过程,每一次迭代都会根据当前参数对训练样本进行预测,并根据预测结果来更新参数。
通过多次迭代,感知机可以逐步优化参数,使得模型的分类性能不断提高。
感知机的数据模型在二分类问题中得到了广泛的应用。
它可以处理线性可分的样本集合,并且在一定条件下可以收敛到最优解。
但是,感知机的数据模型只能解决线性可分的问题,对于线性不可分的问题无法进行有效的分类。
因此,在实际应用中,感知机通常被用作其他更复杂模型的线性部分,如神经网络中的感知机神经元。
基于多层感知机的鸢尾花分类
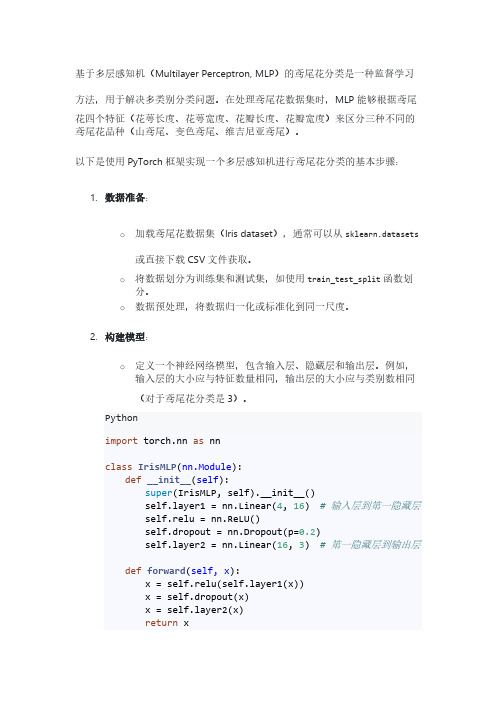
基于多层感知机(Multilayer Perceptron, MLP)的鸢尾花分类是一种监督学习方法,用于解决多类别分类问题。
在处理鸢尾花数据集时,MLP能够根据鸢尾花四个特征(花萼长度、花萼宽度、花瓣长度、花瓣宽度)来区分三种不同的鸢尾花品种(山鸢尾、变色鸢尾、维吉尼亚鸢尾)。
以下是使用PyTorch框架实现一个多层感知机进行鸢尾花分类的基本步骤:1.数据准备:o加载鸢尾花数据集(Iris dataset),通常可以从sklearn.datasets 或直接下载CSV文件获取。
o将数据划分为训练集和测试集,如使用train_test_split函数划分。
o数据预处理,将数据归一化或标准化到同一尺度。
2.构建模型:o定义一个神经网络模型,包含输入层、隐藏层和输出层。
例如,输入层的大小应与特征数量相同,输出层的大小应与类别数相同(对于鸢尾花分类是3)。
Pythonimport torch.nn as nnclass IrisMLP(nn.Module):def__init__(self):super(IrisMLP, self).__init__()yer1 = nn.Linear(4, 16) # 输入层到第一隐藏层 self.relu = nn.ReLU()self.dropout = nn.Dropout(p=0.2)yer2 = nn.Linear(16, 3) # 第一隐藏层到输出层def forward(self, x):x = self.relu(yer1(x))x = self.dropout(x)x = yer2(x)return x3.损失函数与优化器设置:o使用合适的多类别损失函数,如交叉熵损失(CrossEntropyLoss)。
Pythoncriterion = nn.CrossEntropyLoss()optimizer = torch.optim.Adam(model.parameters(),lr=0.001)4.训练循环:o遍历训练集样本,执行前向传播得到预测结果,计算损失并反向传播更新权重。
pointmlp代码解读

pointmlp代码解读1.前言在计算机视觉领域,点云数据是一类重要的三维数据表示形式。
P o in tM LP是一种基于多层感知机(M ult i la ye rP er ce pt ron,ML P)的点云处理方法,它在点云分类、分割等任务上取得了良好的效果。
本文将对P oi nt ML P的代码进行解读,帮助读者更好地理解该算法。
2.点云数据表示与处理点云数据是由一系列的三维点坐标组成的,通常用于在三维空间中描述物体的形状和表面特征。
P oi nt ML P通过将点云数据转换为特征表示,然后利用ML P网络对其进行处理。
2.1数据预处理在P oi nt ML P中,数据预处理是非常重要的一步。
通常,点云数据会包含噪声和不均匀采样问题。
因此,我们需要对原始点云数据进行滤波、采样和归一化等操作,以提高数据的质量和一致性。
2.2特征表示为了将点云数据输入到M LP网络中,我们需要将每个点的特征表示提取出来。
在P oi nt ML P中,常用的特征表示方法有以下几种:-坐标表示:直接使用点的坐标作为特征。
-法线表示:通过计算点的法线方向并进行编码。
-网络特征表示:使用预训练的深度学习网络提取点云特征。
2.3M L P网络M L P网络是一种典型的前馈神经网络,由多个全连接层组成。
在P o in tM LP中,ML P网络被用于学习点云的特征表示和任务的进一步处理。
网络的输入是点云的特征表示,输出是对应的分类或分割结果。
3. Po intMLP代码解读接下来,我们将对Po i nt ML P的关键代码进行解读,以便更好地理解其实现原理。
3.1网络结构P o in tM LP网络的结构由多个ML P单元组成,每个M LP单元由多个全连接层和激活函数构成。
其中,全连接层用于学习输入特征的非线性映射,激活函数用于引入非线性。
i m po rt to rc hi m po rt to rc h.nn asn nc l as sM LP(n n.Mo dul e):d e f__i ni t__(se lf,i np ut_d im,h id den_di ms,o ut pu t_dim):s u pe r(ML P,se lf).__in it__()s e lf.l ay er s=nn.Mo d ul eL is t([])f o ri in ra ng e(le n(hi dd en_d im s)):i f i==0:s e lf.l ay er s.ap pen d(n n.Li ne ar(i npu t_d im,h id de n_dim s[i]))e l se:s e lf.l ay er s.ap pen d(n n.Li ne ar(h idd e n_di ms[i-1],h id de n_di ms[i]))s e lf.l ay er s.ap pen d(n n.Re LU())s e lf.l ay er s.ap pen d(n n.Li ne ar(h idd e n_di ms[-1],o ut pu t_di m))d e ff or wa rd(s el f,x):f o rl ay er in se y er s:x=la ye r(x)r e tu rn x在上述代码中,`MLP`类定义了一个基本的ML P网络,通过`n n.Li ne ar`和`n n.R eL U`构建了一系列的全连接层和激活函数。
基于感知机模型藏文命名实体识别(华却才让)

2014, 50 (15)
Computer Engineering and Applications 计算机工程与应用
基于感知机模型藏文命名实体识别
2 华却才让 1, , 姜文斌 3, 赵海兴 1, 刘
群3
2 HUA Quecairang1, , JIANG Wenbin3, ZHAO Haixing1, LIU Qun3
[2] [1]
导致与音节的后置字符及又后置字符间存在歧义; 第三 动词在时态上具有屈折变化。这些复杂性使得藏文分 词已成为藏文信息处理中的一个难题 [3], 而藏文命名实 体的识别更为困难, 也是必须要解决的问题。 藏文中命名实体类似中文命名实体没有区分标记, 其基本单元一个音节类似中文的一个字, 没有英文中的 大小写特征, 它们和非命名实体没有形态上的区别。大 部分藏族都有姓, 包括古代庄园名、 家族名、 部落名和地 名等, 也有寺院和封号名。常见的藏族人名按音节长度
3
命名实体的序列标注规范
在应用机器学习算法之前, 首先将语料中标注好的
命名实体的单词序列转换成音节标注序列。根据音节
174
2014, 50 (15)
Computer Engineering and Applications 计算机工程与应用
与命名实体的关系, 将音节标注为 13 个标注规范中的 一个。标注详细信息见表 2。比如, 可以将词级别人工 标注好的命名实体句子 (1) 转换为命名实体音节序列标 注句子 (2) 。 (1) 的话。 ) (2) 如果在识别过程中发生歧义, 则句子中的某些音节 会有多个可能的标注。比如, 对于上述句子 (1) 中的组 成人名的每个音节可能存在多个标注 (3) , 下面只给出 了前三个词的标注结果: (3) 这和词性标记相似, 一个音节的标注会受前面音节 的标注影响。比如, 当 标注为 LR 时, 则其后面的音 被标注为 OW 时, 其 节只能被标注为 MR 或 RR; 而当 (意 为 : 端智听了白玛
感知机收敛定理

感知机收敛定理
感知机是一种二分类的线性分类模型,它的学习算法是基于误分类的损失函数,通过梯度下降法来更新模型参数,从而使得模型能够对数据进行分类。
感知机的收敛定理是指,如果训练数据集是线性可分的,那么感知机算法经过有限次迭代之后一定能够找到一个将训练数据集完全正确分类的超平面。
感知机的收敛定理是基于感知机算法的更新规则和误分类点的存在性来证明的。
具体来说,感知机算法的更新规则是基于误分类点的梯度下降法,即对于每个误分类点,通过更新权重向量和偏置项来使得模型能够更好地分类这个点。
而误分类点的存在性是基于训练数据集是线性可分的假设,即存在一个超平面能够将正负样本完全分开。
在感知机算法的迭代过程中,每次更新权重向量和偏置项都会使得模型能够更好地分类误分类点,从而使得误分类点的数量不断减少。
由于训练数据集是线性可分的,所以误分类点的数量是有限的,因此感知机算法经过有限次迭代之后一定能够找到一个将训练数据集完全正确分类的超平面。
需要注意的是,感知机算法的收敛定理只适用于线性可分的训练数据集。
对于线性不可分的训练数据集,感知机算法可能会陷入死循环,无法收敛。
此时,需要采用其他的分类算法,如支持向量机等。
感知机算法的收敛定理是感知机算法的一个重要理论基础,它保证了感知机算法能够在有限次迭代之后找到一个将训练数据集完全正确分类的超平面,从而使得模型能够对新的数据进行准确的分类。
基于感知机实现鸢尾花分类预测实验原理
基于感知机实现鸢尾花分类预测实验原理下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!1. 引言鸢尾花(Iris)是一种常见的植物,其特征明显,因此成为了许多分类算法的经典案例。
基于多层感知机的无线射频标签数量估计方法

基于多层感知机的无线射频标签数量估计方法谢鑫;刘秀龙;王军晓;郭嵩;李克秋【期刊名称】《计算机学报》【年(卷),期】2023(46)3【摘要】近年来,随着标签价格的下降和供应链物流需求的增长,射频识别技术已经走向全面部署阶段.全面部署意指在所有商品上部署标签,以提升供应链追踪的精度.这种趋势会导致标签数据规模呈指数倍增长,给阅读器的信息读取带来很大的压力.在这个背景下,标签数量估计协议,正因为其时间效率高的特点得到越来越多的关注.现有的方法主要根据时隙状态统计特征进行数量估计.然而,各类型数量估计统计量的精度受到系统参数、标签规模、以及随机噪声的影响,其结果很不稳定.任意单一特征都很难给出精准、稳定的数量估计结果.为此,本文设计了一种基于多层感知机的数量估计方法,通过融合多样化的数量估计特征来提高估计的精度.针对真实时隙状态难以获取,模型难以训练的问题,本文研究了如何通过仿真器生成大量具有不同时隙状态的随机帧来训练我们的网络.针对数量估计网络工作范围较窄的问题,我们设计了一种两阶段基于采样思想的数量估计协议,通过快速的标签数量粗略估计设定合理的采样概率,以确保标签数目位于数量估计网络的工作区间.我们的仿真实验结果表明,本文提出的基于多层感知机的数量估计协议比现有方法能提升至少21%的精度.【总页数】13页(P499-511)【作者】谢鑫;刘秀龙;王军晓;郭嵩;李克秋【作者单位】香港理工大学电子与计算学系;天津大学智能与计算学部【正文语种】中文【中图分类】TP18【相关文献】1.物联网中大规模无线射频识别标签的容错估计算法2.基于比特估计的RFID标签数量估计算法3.一种基于贝叶斯推理的多标签数量估计方法4.基于编码分组的无线射频识别多标签防碰撞方法5.莆炎高速钢桁梁大节段施工技术因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于感知机
摘要:
1.感知机的定义与原理
2.感知机的应用领域
3.感知机的优缺点
4.我国在感知机领域的发展
正文:
1.感知机的定义与原理
感知机是一种二分类的线性分类模型,其基于输入数据和输出结果之间的线性关系进行分类。
感知机原理可以简单概括为:当输入数据的类别为正例时,输出结果为1;当输入数据的类别为负例时,输出结果为-1。
感知机在处理线性可分的数据集时,具有很好的分类性能。
2.感知机的应用领域
感知机广泛应用于各种领域,如计算机视觉、语音识别、文本分类等。
在计算机视觉领域,感知机可以用于图像识别和物体检测;在语音识别领域,感知机可以用于将语音信号转换成文本;在文本分类领域,感知机可以用于对文章进行情感分析、主题分类等。
3.感知机的优缺点
感知机的优点在于模型简单、易于实现、计算效率高。
感知机通过权值调整,可以自动学习输入数据的特征,从而实现分类。
然而,感知机也存在一些缺点,如对线性不可分的数据集无法进行分类,容易出现过拟合现象等。
4.我国在感知机领域的发展
我国在感知机领域取得了显著的发展。
在计算机视觉方面,我国已经取得了一系列重要成果,如在ImageNet 图像识别竞赛中取得优异成绩。
在语音识别方面,我国相关技术已经广泛应用于智能手机、智能家居等领域。
在文本分类方面,我国研究者提出了许多改进的感知机模型,提高了模型的分类性能。
总之,感知机作为一种简单的线性分类模型,在各个领域具有广泛的应用。