旋转矩阵、欧拉角、四元数
表示数字姿态
表示数字姿态刚体的姿态(attitude)有很多种表示方法,关于这个话题有一篇十分出名的综述[1],也是这篇文章的主要资料来源。
这篇文章从二维旋转开始,会讨论旋转矢量、旋转矩阵、四元数、欧拉角等旋转的表示方法。
在开始讨论前,需要明确的一点是刚体的姿态具有三个自由度,但使用三个参数对姿态进行全局的、没有奇异性的描述已经被证明是不可能的[2],这也是近来IMU姿态估计的方法大多使用四元数或旋转矩阵的原因。
1.二维旋转的表示相比在三维空间中的旋转,二维旋转十分直观且易于理解。
二维旋转指将二维平面上的一个向量 \bm{v} (起点为原点)绕原点旋转一个角度 \theta ,得到一个新的向量\bm{v}_{\theta} 。
角度 \theta 可以完全描述这个旋转操作,因此是最直接的二维旋转的表示方法。
但需要注意的是,因为角度具有周期性,任何相差 2\pi 的整数倍的两个角度所代表的旋转是相同的(只考虑旋转的结果),所以表示角度的空间不是实数集 \mathbb{R} ,而是一个商空间\mathbb{R}/2\pi 。
这个商空间可以和平面上的单位圆做一一对应:\theta\leftrightarrow(\cos{\theta},\sin{\theta}) ,也就是说,我们可以认为单位圆上的每一个点,对应了一个独特的旋转操作,这也是二维旋转的第二种表示方法。
最后,如果我们把旋转后得到的向量写成坐标的形式,可以得到:\bm{v}_{\theta}=\left[\begin{matrix}\cos{\theta}&-\sin{\theta}\\\sin{\theta}&\cos{\theta}\end{matrix}\ri ght]\bm{v}=\mathbf{R}(\theta)\bm{v} (1)其中 \mathbf{R}(\theta) 被称为二维旋转矩阵,可以和\mathbb{R}/2\pi 作一一对应,是二维旋转的第三种表示方法。
旋转矩阵、旋转向量、欧拉角、四元数的关系

旋转矩阵、旋转向量、欧拉⾓、四元数的关系向量的矩阵形式有两个向量:→a =(a 1,a 2,a 3)→b =(b 1,b 2,b 3)叉乘的结果表⽰⼀个向量,这个向量向量垂直于a,b 向量构成的平⾯。
→a ×→b =‖e 1e 2e 3a 1a 2a 3b 1b 2b 3‖=a 2b 3−a 3b 2a 3b 1−a 1b 3a 1b 2−a 2b 1=0−a 3a 2a 30−a 1−a 2a 10b 1b 2b 3=a ∧b将向量a 对应的矩阵表⽰出来,为⼀个反对称矩阵,每⼀个向量都对应着⼀个反对称矩阵。
这就引出向量的矩阵形式。
a ∧=0−a 3a 2a 30−a 1−a 2a 1坐标变换的易混点在齐次变换中p 1=T 12·p 2p 2=T 23·p 3T 12表⽰,把坐标系{2}的向量变换到坐标系{1}中,T 23同理,如果把坐标系{3}下的向量变换到坐标系{1}中为:p 1=T 12·T 23·p 3旋转向量和欧拉⾓: SO(3)的旋转矩阵有9个量,但是只有3个⾃由度,同理SE(3)有16个量,但是也只有6个⾃由度。
在实际的旋转中,任意的旋转都可⽤⼀个旋转轴和⼀个旋转⾓来表⽰,我们使⽤⼀个向量,⽅向与旋转轴⼀致,长度等于旋转⾓,这样只需要⼀个三维向量即可描述旋转。
对于SE(3),⽤⼀个旋转向量和⼀个平移向量即可表达,恰好⾃由度为6.如果⽤旋转向量来描述R :旋转轴为⼀个单位长度的向量n,⾓度为θ,那么θn 可以表⽰这个旋转。
旋转矩阵R 和旋转向量θn 的转换过程为罗德⾥格斯变换:R =cos θI +(1−cos θ)nn T +sin θn ∧此处末尾的n ∧ 如上⾯所⽰,代表矩阵表⽰的向量。
那么反过来通过旋转矩阵获取转⾓ θ;θ=arccostr (R )−12tr(R)为矩阵R 的迹。
对于转轴n,Rn=n;表⽰为转轴绕⾃⾝转动不⽣改变,从数学来说n 是矩阵R 特征值为1时对应的特征向量。
旋转矩阵、欧拉角、四元数理论及其转换关系

旋转矩阵、欧拉⾓、四元数理论及其转换关系1. 概述旋转矩阵、欧拉⾓、四元数主要⽤于表⽰坐标系中的旋转关系,它们之间的转换关系可以减⼩⼀些算法的复杂度。
本⽂主要介绍了旋转矩阵、欧拉⾓、四元数的基本理论及其之间的转换关系。
2、原理2.1 旋转矩阵对于两个三维点p1(x1,y1,z1),p2(x2,y2,z2),由点 p1 经过旋转矩阵 R 旋转到 p2,则有注:旋转矩阵为正交矩阵RR^T=E任意旋转矩阵:任何⼀个旋转可以表⽰为依次绕着三个旋转轴旋三个⾓度的组合。
这三个⾓度称为欧拉⾓。
三个轴可以指固定的世界坐标系轴,也可以指被旋转的物体坐标系的轴。
三个旋转轴次序不同,会导致结果不同。
2.2 欧拉⾓欧拉⾓有两种:静态:即绕世界坐标系三个轴的旋转,由于物体旋转过程中坐标轴保持静⽌,所以称为静态。
动态:即绕物体坐标系三个轴的旋转,由于物体旋转过程中坐标轴随着物体做相同的转动,所以称为动态。
使⽤动态欧拉⾓会出现万向锁现象;静态欧拉⾓不存在万向锁的问题。
对于在三维空间⾥的⼀个参考系,任何坐标系的取向,都可以⽤三个欧拉⾓来表现。
参考系⼜称为实验室参考系,是静⽌不动的。
⽽坐标系则固定于刚体,随着刚体的旋转⽽旋转。
如图1,设定xyz-轴为参考系的参考轴。
称xy-平⾯与XY-平⾯的相交为交点线,⽤英⽂字母(N)代表。
zxz顺规的欧拉⾓可以静态地这样定义:α是x-轴与交点线的夹⾓,β是z-轴与Z-轴的夹⾓,γ是交点线与X-轴的夹⾓。
图中三个欧拉⾓分别为:(α,β,γ);蓝⾊的轴为:xyz轴红⾊的轴为:XYZ轴绿⾊的线为交线:Nα∈[0,2π],β∈[0,π],γ∈[0,2π]很可惜地,对于夹⾓的顺序和标记,夹⾓的两个轴的指定,并没有任何常规。
科学家对此从未达成共识。
每当⽤到欧拉⾓时,我们必须明确的表⽰出夹⾓的顺序,指定其参考轴。
实际上,有许多⽅法可以设定两个坐标系的相对取向。
欧拉⾓⽅法只是其中的⼀种。
此外,不同的作者会⽤不同组合的欧拉⾓来描述,或⽤不同的名字表⽰同样的欧拉⾓。
三维旋转矩阵与自身相乘
三维旋转矩阵与自身相乘1. 介绍在计算机图形学和计算机视觉领域,三维旋转矩阵是一种用于描述三维空间中物体旋转的数学工具。
它可以通过矩阵相乘的方式将一个向量或者一个矩阵进行旋转变换。
本文将详细介绍三维旋转矩阵的定义、性质以及如何将一个三维旋转矩阵与自身相乘的操作。
2. 三维旋转矩阵的定义三维旋转矩阵是一个3x3的正交矩阵,表示一个物体在三维空间中的旋转变换。
它的每一列向量都是一个单位向量,且互相垂直。
三维旋转矩阵可以通过欧拉角、四元数或旋转矩阵的形式进行表示。
2.1 欧拉角表示欧拉角表示法使用三个角度来描述旋转变换。
常用的欧拉角顺序有XYZ、XZY、YXZ、YZX、ZXY和ZYX六种。
以XYZ顺序为例,旋转矩阵可以表示为:R = Rz * Ry * Rx其中Rx、Ry和Rz分别表示绕X轴、Y轴和Z轴的旋转矩阵。
2.2 四元数表示四元数是一种扩展了复数的数学工具,可以用来表示旋转变换。
一个四元数可以表示为:q = w + xi + yj + zk其中w、x、y和z是实数,i、j和k是虚数单位。
通过四元数可以构造一个旋转矩阵,表示为:R = | 1-2y^2-2z^2 2xy-2wz 2xz+2wy || 2xy+2wz 1-2x^2-2z^2 2yz-2wx || 2xz-2wy 2yz+2wx 1-2x^2-2y^2 |2.3 旋转矩阵表示旋转矩阵可以直接表示为一个3x3的矩阵,其中每一列向量都是一个单位向量,且互相垂直。
例如,绕X轴旋转θ角度的旋转矩阵可以表示为:R = | 1 0 0 || 0 cosθ -si nθ || 0 sinθ cosθ |3. 三维旋转矩阵的性质三维旋转矩阵具有一些重要的性质,这些性质对于理解旋转矩阵的操作非常重要。
3.1 正交性旋转矩阵的每一列向量都是单位向量,且互相垂直。
这意味着旋转矩阵是一个正交矩阵,满足以下等式:R^T * R = I其中R^T表示R的转置,I表示单位矩阵。
旋转知识点总结
旋转知识点总结旋转是一种常见的几何变换,它改变了物体的方向、位置和角度。
在计算机图形学、几何学、物理学和工程学等领域都有广泛的应用。
下面是对旋转相关知识点的一些总结:1. 旋转的定义:旋转是一种刚体运动,它将物体绕着特定的轴线转动一定的角度。
旋转由旋转中心、旋转轴和旋转角度三个要素来描述。
2. 旋转的方向:旋转可以是顺时针方向或逆时针方向。
在三维空间中,右手法则可以确定旋转的方向。
3. 旋转角度的表示:旋转角度可以用弧度制或角度制来表示。
弧度制是使用弧长与半径的比值来表示角度,角度制则是使用度数来表示。
4. 旋转矩阵:旋转可以用旋转矩阵来表示。
旋转矩阵是一个二维矩阵,其中每个元素表示旋转后的坐标与旋转前的坐标之间的关系。
5. 旋转轴的表示:旋转轴可以用向量来表示,向量的方向和大小决定了旋转轴的方向和旋转角度的大小。
6. 旋转的基本性质:旋转具有一些基本的性质,包括不变性、可逆性、可叠加性等。
这些性质对于旋转的应用非常重要。
7. 旋转的合成:旋转可以进行合成,即先进行一个旋转,再进行另一个旋转。
合成旋转可以通过旋转矩阵的乘法来实现。
8. 旋转的变换:旋转可以用来进行物体的变换,包括位置的变换、形状的变换和姿态的变换等。
旋转变换可以通过矩阵乘法来实现。
9. 欧拉角和四元数:欧拉角和四元数是常用的旋转表示方法。
欧拉角使用三个独立的角度来表示旋转,而四元数使用一个四维向量来表示旋转。
10. 旋转的应用:旋转在计算机图形学中有广泛的应用,包括三维建模、动画、物理模拟等。
旋转也被广泛应用于机器人学、飞行控制、游戏开发等领域。
11. 旋转的误差:由于测量误差和计算误差等原因,旋转变换可能会引入一定的误差。
为了减少误差,可以使用数值方法和优化算法等技术来进行旋转估计和校正。
12. 旋转的性能优化:旋转的计算通常比较复杂,对于大规模的数据和复杂的模型,旋转计算可能会成为性能瓶颈。
为了提高性能,可以使用并行计算、SIMD指令、快速算法等技术来加速旋转计算。
四元数
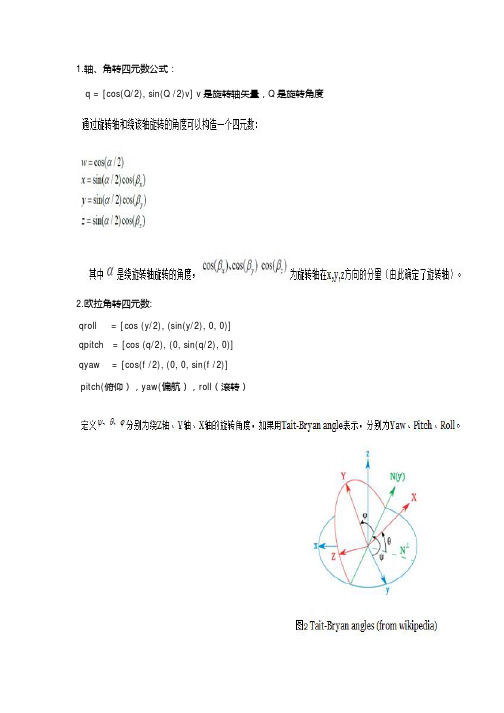
1.轴、角转四元数公式:q = [cos(Q/2), sin(Q /2)v] v是旋转轴矢量,Q是旋转角度2.欧拉角转四元数:qroll = [cos (y/2), (sin(y/2), 0, 0)]qpitch = [cos (q/2), (0, sin(q/2), 0)]qyaw = [cos(f /2), (0, 0, sin(f /2)]pitch(俯仰),yaw(偏航),roll(滚转)3.四元数转旋转矩阵:| 1 - 2y2 - 2z2 2yz + 2wx 2xz - 2wy | Rm = | 2xy - 2wz 1 - 2x2 - 2z2 2yz - 2wx | | 2xz + 2wy 2yz - 2wx 1 - 2x2 - 2y2|4.矩阵转四元数代码:MatToQuat(float m[4][4], QUAT * quat){float tr, s, q[4];int i, j, k;int nxt[3] = {1, 2, 0};tr = m[0][0] + m[1][1] + m[2][2];// check the diagonalif (tr > 0.0){s = sqrt (tr + 1.0);quat->w = s / 2.0;s = 0.5 / s;quat->x = (m[1][2] - m[2][1]) * s;quat->y = (m[2][0] - m[0][2]) * s;quat->z = (m[0][1] - m[1][0]) * s;}else{// diagonal is negativei = 0;if (m[1][1] > m[0][0]) i = 1;if (m[2][2] > m[i][i]) i = 2;j = nxt[i];k = nxt[j];s = sqrt ((m[i][i] - (m[j][j] + m[k][k])) + 1.0); q[i] = s * 0.5;if (s != 0.0) s = 0.5 / s;q[3] = (m[j][k] - m[k][j]) * s;q[j] = (m[i][j] + m[j][i]) * s;q[k] = (m[i][k] + m[k][i]) * s;quat->x = q[0];quat->y = q[1];quat->z = q[2];quat->w = q[3];}}5.四元数转矩阵代码:QuatToMatrix(QUAT * quat, float m[4][4]){float wx, wy, wz, xx, yy, yz, xy, xz, zz, x2, y2, z2;// calculate coefficientsx2 = quat->x + quat->x;y2 = quat->y + quat->y;z2 = quat->z + quat->z;xx = quat->x * x2;xy = quat->x * y2;xz = quat->x * z2;yy = quat->y * y2;yz = quat->y * z2;zz = quat->z * z2;wx = quat->w * x2;wy = quat->w * y2;wz = quat->w * z2;m[0][0] = 1.0 - (yy + zz);m[1][0] = xy - wz;m[2][0] = xz + wy;m[3][0] = 0.0;m[0][1] = xy + wz;m[1][1] = 1.0 - (xx + zz);m[2][1] = yz - wx;m[3][1] = 0.0;m[0][2] = xz - wy;m[1][2] = yz + wx;m[2][2] = 1.0 - (xx + yy);m[3][2] = 0.0;m[0][3] = 0;m[1][3] = 0;m[2][3] = 0;m[3][3] = 1;}6.欧拉角转四元数代码:EulerToQuat(float roll, float pitch, float yaw, QUAT * quat) {float cr, cp, cy, sr, sp, sy, cpcy, spsy;// calculate trig identitiescr = cos(roll/2);cp = cos(pitch/2);cy = cos(yaw/2);sr = sin(roll/2);sp = sin(pitch/2);sy = sin(yaw/2);cpcy = cp * cy;spsy = sp * sy;quat->w = cr * cpcy + sr * spsy;quat->x = sr * cpcy - cr * spsy;quat->y = cr * sp * cy + sr * cp * sy; quat->z = cr * cp * sy - sr * sp * cy; }四元数乘法QuatMul(QUAT *q1, QUAT *q2, QUAT *res){ float A, B, C, D, E, F, G, H;A = (q1->w + q1->x)*(q2->w + q2->x);B = (q1->z - q1->y)*(q2->y - q2->z);C = (q1->w - q1->x)*(q2->y + q2->z);D = (q1->y + q1->z)*(q2->w - q2->x);E = (q1->x + q1->z)*(q2->x + q2->y);F = (q1->x - q1->z)*(q2->x - q2->y);G = (q1->w + q1->y)*(q2->w - q2->z);H = (q1->w - q1->y)*(q2->w + q2->z);res->w = B + (-E - F + G + H) /2;res->x = A - (E + F + G + H)/2;res->y = C + (E - F + G - H)/2;res->z = D + (E - F - G + H)/2;}四元数插值QuatSlerp(QUAT * from, QUAT * to, float t, QUAT * res){float to1[4];double omega, cosom, sinom, scale0, scale1;// calc cosinecosom = from->x * to->x + from->y * to->y + from->z * to->z + from->w * to->w;// adjust signs (if necessary)if ( cosom <0.0 ){ cosom = -cosom; to1[0] = - to->x;to1[1] = - to->y;to1[2] = - to->z;to1[3] = - to->w;} else {to1[0] = to->x;to1[1] = to->y;to1[2] = to->z;to1[3] = to->w;}// calculate coefficientsif ( (1.0 - cosom) > DELTA ) {// standard case (slerp)omega = acos(cosom);sinom = sin(omega);scale0 = sin((1.0 - t) * omega) / sinom; scale1 = sin(t * omega) / sinom;} else {// "from" and "to" quaternions are very close// ... so we can do a linear interpolationscale0 = 1.0 - t;scale1 = t;}// calculate final valuesres->x = scale0 * from->x + scale1 * to1[0]; res->y = scale0 * from->y + scale1 * to1[1]; res->z = scale0 * from->z + scale1 * to1[2]; res->w = scale0 * from->w + scale1 * to1[3]; }。
三维旋转:旋转矩阵,欧拉角,四元数

三维旋转:旋转矩阵,欧拉⾓,四元数原⽂见我的,欢迎⼤家过去评论。
如何描述三维空间中刚体的旋转,是个有趣的问题。
具体地说,就是刚体上的任意⼀个点P(x, y, z)围绕过原点的轴(i, j, k)旋转θ,求旋转后的点P\'(x\', y\', z\')。
旋转矩阵旋转矩阵乘以点P的齐次坐标,得到旋转后的点P',因此旋转矩阵可以描述旋转,$$\begin{bmatrix}x'\\ y'\\ z'\\ 1\end{bmatrix}=R\cdot \begin{bmatrix}x\\ y\\ z\\ 1\end{bmatrix}$$绕x,y,或z轴旋转θ的矩阵为:$$R_{x}(\theta)=\begin{bmatrix}1 & 0 & 0\\ 0 & \cos\theta & -\sin\theta\\ 0 & \sin\theta & \cos\theta\end{bmatrix}$$$$R_{y}(\theta)=\begin{bmatrix}\cos\theta & 0 & -\sin\theta\\ 0 & 1 & 0\\ \sin\theta & 0 & \cos\theta\end{bmatrix}$$$$R_{z}(\theta)=\begin{bmatrix}\cos\theta & -\sin\theta & 0\\ \sin\theta & \cos\theta & 0\\ 0 & 0 & 1\end{bmatrix}$$所以,绕任意轴旋转的矩阵为$$R_{x}(-p)\cdot R_{y}(-q)\cdot R_{z}(\theta)\cdot R_{y}(q)\cdot R_{x}(p)$$这表⽰:1. 绕x轴旋转⾓度p使指定的旋转轴在xz平⾯上2. 绕y轴旋转⾓度q使指定的旋转轴与z轴重合3. 绕z轴旋转⾓度θ4. 绕y轴旋转⾓度-q5. 绕x轴旋转⾓度-p其中,p和q的值需要⽤i,j,k计算出来。
三维空间旋转坐标表示

三维空间旋转坐标表示
在三维空间中,旋转坐标通常用欧拉角、旋转矩阵或四元数来表示。
1. 欧拉角:欧拉角是用来描述三维空间中旋转的一种方法,它使用三个角度值(通常用α、β和γ表示)来表示一个物体的方位。
其中,α表示物体绕着垂直于纸面的轴线旋转的角度,β表示物体绕着平行于纸面的轴线旋转的角度,γ表示物体绕着通过旋转轴线的垂直轴线旋转的角度。
2. 旋转矩阵:旋转矩阵是一种用来描述三维空间中旋转的数学工具,它是一个3x3的方阵,可以表示一个绕着某个轴旋转一定角度的旋转操作。
旋转矩阵的表示方法有很多种,其中最常用的是单位矩阵和绕着Z轴旋转的矩阵。
单位矩阵表示不进行任何旋转,而绕着Z轴旋转的矩阵则可以用来表示绕着Z轴旋转一定角度的操作。
3. 四元数:四元数是一种用来描述三维空间中旋转的数学工具,它由一个实数和三个虚数组成,可以表示一个绕着某个轴旋转一定角度的旋转操作。
四元数的表示方法有很多种,其中最常用的是单位四元数和绕着Z轴旋转的四元数。
单位四元数表示不进行任何旋转,而绕着Z轴旋转的四元数则可以用来表示绕着Z轴旋转一定角度的操作。
总之,三维空间的旋转坐标表示方法有很多种,具体使用哪种方法取决于具体的应用场景和需求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
旋转矩阵、欧拉角、四元数比较
旋转矩阵、欧拉角、四元数主要用于:
向量的旋转、坐标系之间的转换、角位移计算、方位的平滑插值计算
各方法比较
任务/性质旋转矩阵欧拉角四元数
在坐标系间(物体和惯性)旋转点能不能(必须转换到矩
阵)
不能(必须转换到矩
阵)
连接或增量旋转能,但经常比四元数
慢,小心矩阵蠕变的情
况
不能能,比矩阵快
插值基本上不能能,但可能遭遇万向锁
或其他问题Slerp提供了平滑插值
易用程度难易难
在内存或文件中存储9个数3个数4个数
对给定方位的表达方式是否唯一是不是,对同一方位有无
数多种方法
不是,有两种方法,它
们互相为互
可能导致非法矩阵蠕变任意三个数都能构成
合法的欧拉角可能会出现误差积累,从而产生非法的四元数
不同的方位表示方法适用于不同的情况。
下面是我们对合理选择格式的一些建议:
l 欧拉角最容易使用。
当需要为世界中的物体指定方位时,欧拉角能大大的简化人机交互,
包括直接的键盘输入方位、在代码中指定方位(如为渲染设定摄像机)、在调试中测试。
这个优点不应该被忽视,不要以”优化”为名义而牺牲易用性,除非你去顶这种优化的确有效果。
2如果需要在坐标系之间转换响亮,那么就选择矩阵形式。
当然,这并不意味着你就不能用其他格式来保存方位,并在需要的时候转换到矩阵格式。
另一种方法是用欧拉角作为方位的”主拷贝”但同时维护一个旋转矩阵,当欧拉角发生改变时矩阵也要同时进行更新。
3 当需要大量保存方位数据(如:动画)时,就使用欧拉角或四元数。
欧
拉角将少占用25%的内存,但它在转换到矩阵时要稍微慢一些。
如果动画数据需要嵌套坐标系之间的连接,四元数可能是最好的选择。
4 平滑的插值只能用四元数完成。
如果你用其他形式,也可以先转换
到四元数然后再插值,插值完毕后再转换回原来的形式。