第二章 测试系统
第二章 测试系统的基本特性-动态特性
练习
0
( t ) 0 . 5 cos 10 t 0 . 2 cos( 100 t 45 ) 求周期信号 x
通过传递函数为
1 H (s ) 0 .005 s 1
的装置后得到的稳态响应?
一阶系统在典型输入下的响应
• 脉冲响应
x(t) (t) 其拉氏变换:X(s) 1 1 t / 一阶系统的响应: y(t) e
2 2 4 2
a r c t a n ( ) a r c t a5 . 2 3 1 0 ) 9 1 9 5 0
4 o
练习
一温度传感器为一阶系统,其时 间常数τ=0.001s,求当测量频率 f=100Hz信号时的幅值误差和相位误差。
1
1 () 1
2
≤0.05
1 ( ) ≤ 2 1 0 . 1 0 8 0 . 9 5
0 .00052
1 1 1 1 1 1 1 0 . 9 8 6 8 1 . 3 2 % ( )1 ( 2 f )1 ( 2 5 0 5 . 2 3 1 0 )1
n
n 2
1 4
22 2 n n
1
2
2 n ( ) arctg 2 1 n
二阶系统的幅相频特性
1) 、ω/ω A(ω) 近似水平直线, φ(ω) =-180º 4)、当 ω=ω 时, A(ω)=1/(2ξ) , φ(ω) =-90º , 。 n>2 n, 幅值剧增,共振。
m m 1
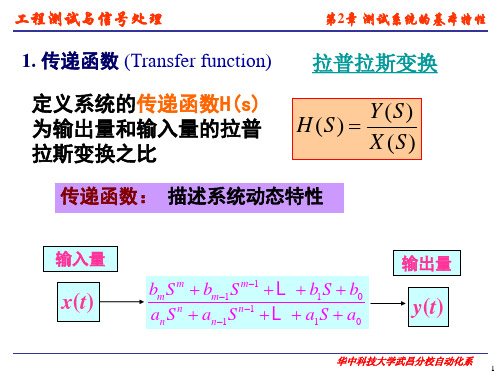
频率响应函数是传递函数的特例。
Y ( j ) X ( j ) H ( j )
传递函数H(s)是在复数域中描述和考察系统的 特性;频率响应函数H(ω)是在频域中描述和 考察系统特性。
第2章测试系统的静态特性与数据处理
信号与测试技术
24
2.3 测试系统的主要静态性能指标及其计算 二、量程(Span) 测量范围的上限值与下限值之代数差,记为:xmax- xmin
2011/3/21
信号与测试技术
25
2.3 测试系统的主要静态性能指标及其计算 三、静态灵敏度(Sensitivity) 测试系统被测量的单位变化量引起的输出变化量之 比,称为静态灵敏度。
– 函数及曲线
y = f ( x) = ∑ ai xi
i =0
n
y
ai 测试系统的标定系数, 反映了系统静态特性曲线的形态
x
y = a0 + a1 x a0零位输出, a1静态传递系数
2011/3/21
零位补偿
y = a1 x
信号与测试技术
10
2.2 测试系统的静态标定 1、静态标定的定义: • 在一定标准条件下,利用一定等级的标定设备对测试 系统进行多次往复测试的过程,以获取被测试系统的 静态特性。
2011/3/21 信号与测试技术
y ynj
(xi,ydij)
yij
(xi,yuij)
y2j y1j
x1 x2
xi
xn
x
16
2.2 测试系统的静态标定 • 对上述数据进行处理,获得被测系统的静态特性:
1 m yi = yuij + ydij ) ( ∑ 2m j =1 i = 1, 2," , n
yFS
× 100% = max y i − yi , i = 1, 2,...n
( ΔyL )max = max Δyi ,L
2011/3/21
非线性度 non-linearity
yFS = B( xmax − xmin ) ——满量程输出,B参考直线的斜率
五邑大学测试技术第二章测试系统分析

测试系统特性
系统分析中的三类问题: x(t)
h(t)
y(t)
1)当输入、输出是可测量的(已知),可以通 过它们推断系统的传输特性。(系统辨识) 2)当系统特性已知,输出可测量,可以通过 它们推断导致该输出的输入量。 (反求)
3)如果输入和系统特性已知,则可以推断 和估计系统的输出量。(预测)
测试系统特性
系:
方法:利用已知的标准值,或,精确测量后的已知量 值,输入到待标定的测量系统或传感器等仪表中,记 录相应的输出值;反复多次试验,得到相应的输入 / 输出数据;运用适当的统计方法对所得到的数据进行 处理,建立输入量与输出量之间的函数关系。
第2章 测试系统分析
一般步骤: (1). 选定输入与输出之间的关系类型,即:模型; 通过研究系统的物理性质得到模型。实践中最常用的 是线性模型: y kx b 其中,x是被测量,y是输出量,b是系统的0点。b=0 时,简化为比例模型:y kx (2). 条件不变,反复测量,获得数据; (3). 数据处理,确定模型参数; 以概率统计为基础的数据处理方法。例如:线性模型 参数确定——线性回归方法。
线性系统(时域描述)
系统输入x(t)和输出y(t)间的关系可以用常 系数线性微分方程来描述:
an y (t ) an1 y
n
n1
(t ) ...a1 y(t ) a0
m1
bm x (t ) bm1 x
m
(t ) ...b1 x(t ) b0
一般在工程中使用的测试装置都是线性系统。
测试系统特性
静态测量时,测试装置表现出的响应特 性称为静态响应特性。 a)灵敏度
当测试装置的输入 x 有一增量△ x, 引起输出 y 发 生相应变化△y时,定义: S=△y/△x
第二章测试系统的基本特性[1]
![第二章测试系统的基本特性[1]](https://img.taocdn.com/s3/m/65f2056f25c52cc58bd6be93.png)
第二章测试系统的基本特性第一节概述测试的目的是为了准确了解被测物理量,而研究测试系统特性的目的则是为了能使系统尽可能准确真实地反映被测物理量,且为测试系统性能的评价提出一个标准。
1.测试系统能完成对某一物理量进行测取的装置,它即可以是一个单一环节组成的装置,如传感器,又可以是一个由多个功能环节组成的系统,如应变测量中的“传感器-应变仪-记录仪”。
2.对测试系统的基本要求工程测试的基本传输关系如图示,所要寻求的是输入x(t),输出y(t),系统传输性三者的关系,即1)由已知的系统的输入和输出量,求系统的传递特性。
2)由已知的输入量和系统的传递特性,推求系统的输出量。
3)由已知系统的传递特性和输出量,来推知系统的输入量。
为使上述三种问题能由已知方便的确定未知,为此提出,对于一个测试来说,应具有的基本特性是:单值的、确定的输入-输出关系,即对应于每一个输入量都应只有单一的输出量与之对应,能满足上述要求的系统一般是线性系统。
3.测试系统的特性的描述对测试系统特性的描述通常有静态特性、动态特性、负载特性、抗干扰特性。
4.线性系统简介二、线性系统及其主要性质当系统的输入x(t)和输出y(t)之间的关系可用常系数线性微分方程(2-1)来描述时,则称该系统为定常线性系统。
线性系统有如下性质(以x(t) y(t)表示系统的输入、输出关系):1)叠加性表明作用于线性系统的各个输人所产生的输出互不影响,这样当分析众多输人同时加在系统上所产生的总效果时,可以先分别分析单个输入(假定其他输入不存往)的效果,然后将这些效果叠加起来以表示总的效果。
2)比例特性若 x(t)→y(t)则3)微分性质 系统对输入导数的响应等于对原输入响应的导数,即4)积分性质 系统对输入积分的响应等于对原输入响应的积分,即5)频率保持性 若输入为某一频率的间谐信号,则系统的稳态输出必是、也只是同频率的间谐信号。
由于按线性系统的比例特性,对于某一已知频率ω有又根据线性系统的微分特性,有应用叠加原理,有现令输人为某一单一频率的简谐信号,记作t j e X t x ω0)(=,那么其二阶导数应为由此,得相应的输出也应为于是输出y(t)的唯一的可能解只能是线性系统的这些主要特性,特别是叠加性和频率保持性,在测试工作中具有重要的作用。
测试系统特性78页PPT

测试系统的静态特性曲
线如图。静态特性指标均反
映在曲线上。
7
一、静态特性指标
一、静态特性指标
1. 灵敏度
灵敏度——测试系统输出量的变化与 输入量的变化之比。
x 系统 y
x+x 系统 y+y
灵敏度
S y x
输入、输出同量纲时,S称为放大倍数 8
一、静态特性指标
线性的 Syyb0 常数 x x a0
❖当测试装置本身存在某些随机因素影响输出
时,可在相同条件下进行多次重画出静
态特性曲线。
17
二、静态特性参数的测定
❖有回差的测试装置,正行程和反行程组成一 个循环。在相同条件下进行多次循环测量, 求出平均值,便可得到正反行程的静态特性 曲线。
18
§2-2 测试系统的动态特性
anddnnytan1ddn nt11 y a1ddyta0y bmddmm xtbm1ddmm t1x1 b1ddxtb0x
式中: an,an-1,a0和bn,bn-1,b0是与测试装置
结构参数有关的系数。若这些系数是常数,该方 程是常系数微分方程,所描述的是时不变系统。21
一、线性系统的主要特性
测试系统特性
第二章 测试系统的特性
2
测试系统的组成
❖测试系统的组成
被测量 传感器
信号调理器
记录显示器
1. 传感器 感受被测物理量并把它变换为便
于传输处理的电信号。它是整个测试系统实 现测试和自动控制的首要的、关键的环节。
2. 信号调理器 将传感器输出的微弱电信号
进行再次变换、放大、衰减、滤波、调制和
动 态 特 性
❖静态特性可以用代数方程表示;动态特性可以用 微分方程表示。
第二章 测试系统的基本特性动态特性
22
工程测试与信号处理
第2章 测试系统的基本特性
二阶系统的幅相频特性
1) 、ω/ω A(ω) 近似水平直线, φ(ω) =-180º 4)、当 ω=ω 时, A(ω)=1/(2ξ) , φ(ω) =-90º , 。 n>2 n, 幅值剧增,共振。
华中科技大学武昌分校自动化系
11
工程测试与信号处理
第2章 测试系统的基本特性
频率响应函数 H ( j )
1 1 j 2 2 H(( S )) j 1 1 ( ) 1 1 1 S 1 H ( j ) j 2 它的幅频、相频特性的为: j 1 1 ( ) 1 ( ) 2 1 A( )= H(j )
2
1
1 0.9868 1.32%
arctan( ) arctan(2f ) arctan(2 50 5.23 104 ) 9o1950
华中科技大学武昌分校自动化系
15
工程测试与信号处理
第2章 测试系统的基本特性
练习
一温度传感器为一阶系统,其时 间常数τ=0.001s,求当测量频率 f=100Hz信号时的幅值误差和相位误差。
华中科技大学武昌分校自动化系
2
工程测试与信号处理
第2章 测试系统的基本特性
系统串联 系统并联
H ( s ) H1 ( s ) H 2 ( s ) H ( s ) H1 ( s ) H 2 ( s )
H ( s) H ( s)
Y ( s)
X ( s)
X ( s)
H 2 ( s)
H1 (s)
| | ≤ 5% 0.05
2
第二章 测量系统的动态特性
传递函数以测量装置本身的参数表示出输入与输出之间的 关系,所以它将包含- 着联系输入量与输出量所必须的单位。
1. 测量系统在瞬变参数测量中的动态特性
当测量系统包 含多个子系统:
H (s ) { H 1 (s ),H 2 (s )L H n (s )}
传递函数结构
(1)串联环节; (2)并联环节; (3)反馈联接。
-
1. 测量系统在瞬变参数测量中的动态特性
(1)串联环节
H(s)
X(s)
Z(s)
H1(s)
H2(s)
两个环节串联
H (s) Y (s) X (s)
Y(s)
Z (s)H 2(s)
X (s)
H 1(s)X (s)H 2(s) X (s)
H 1(s)H 2(s)
由n个环节组成的串联 系统,其传递函数为:
3.测量系统的动态特性如何表示?如何研究动 态特性的评价?
4.如何知道现有的测量系统的动态特性。
-
输入
广义控制系统
控制器
控制对象
输出
输出
测量系统 测量系统 测量系统
输出
有反馈的测量系统
测量系统
控制器
子测量系统
-
输入 输入
1. 测量系统在瞬变参数测量中的动态特性
静态测量、静态响应特性
静态测量:测量时,测试装置的输入、输出信号不随 时间而变化;
外界干扰 温 湿 压 冲 振 电磁 度 度 力 击 动 场场
输入 x
检测系统
输入 y = f(x)
摩 间 松 迟 蠕 变老 擦 隙 动 滞 变 形化
误差因素
-
1. 测量系统在瞬变参数测量中的动态特性
动态测量系统 — 例 零阶系统:电位计、电子示波器
第二章 测试系统的特性预备.ppt
any(n)(t)+an-1y(n-1)(t)+…+a1y(1)(t)+a0y(0)(t)=bmx(m)(t) +bm-1x(m-1)(t)+…+b1x(1)(t)+b0x(0)(t)
式中:an,an-1…a0和bm,bm-1…b0是与测试装置结构参数有 关的系数。
若这些系数为常数,该方程就是常系数微分方程, 所描述的是时不变线性系统。
3)灵敏度的量纲由输入和输出的量纲决定。若输出和 输入的量纲相同,则称放大倍数。
4)应该注意的是,装置的灵敏度越高,就越容易受 外界干扰的影响,即装置的稳定性越差。灵敏度越高,测 量范围越小。
2、线性度
线性度又称非线性误差,是指传感器实际特性曲线与拟合直线(有时也称 理论直线)之间的最大偏差与传感器量程范围内的输出之百分比。
1、灵敏度
灵敏度表征的是测试系统对输入信号变化的一种反应能力。 灵敏度是指传感器在稳态下输出变化值与输入变化值之比, 用S 来表示:
S =Δy/Δx =dy/dx
1)线性装置的灵敏度S为常数,是输入与输出关系直 线的斜率,斜率越大,其灵敏度就越高。
2) 非线性装置的灵敏度S是一个变量,即X-y关系曲 线的斜率,输入量不同,灵敏度就不同,通常用拟合直线 的斜率表示平均灵敏度。
δL=ΔLm/A×100%
应当注意,量程越小,线性化带来的误差越小,因此要求线性化误差小的场 合可以 采取分段线性化。
y ym
△Lm A
0
xm
x
3、分辨力
分辨力是指测试系统所能检测出来的输入量的 最小变化量。当被测量的变化小于分辨力时,
传感器对输入量的变化无任何反应。对数字仪表 而言,可以认为该表的最后一位所表示的数值就
Chapter2测试系统的基本特性优秀课件
3)如果输入和系统特性已知,则可以推断和估计系统的输出量。(预测)
2. 理想测试系统——线性时不变系统
理想的测试系统应该具有单值的、确定的输入-输出 关系。对于每一输入量都应该只有单一的输出量与之对应。 知道其中一个量就可以确定另一个量。其中以输出和输入 成线性关系最佳。
y(t) 线性
y(t) 线性
非线性 y(t)
x(t)
x(t)
x(t)
(a) 线性系统
测试系统输入x(t)和输出y(t)间的关系可以用常系数 线性微分方程来描述:
an
d n y(t) dt n
an1
d n1 y(t) dt n1
a1
dy (t ) dt
a0 y(t)
bm
d m x(t) dt m
bm1
mm mm
mm
20 0
40 0
10
测试
20 -5
0 -5 0
0.5
1
1.5
2
2.5
3
系统
-10
(b)
0 -10 -20 0
0.5
1
1.5
2
2.5
3t
-20010
0.5
1
1.5
2
2.5
3t
-40
200
0.5
1
1.5
2
2.5
3t
mm mm
mm
10 5
0x2(t)= 2A1Sin(ω2t+θ2)= 20Sin(2π·3·t+π/6)
系统失真
输入(重量)
弹簧
输出(弹簧位移)
第二章测量系统
可以记为
Y (s) y(t)est dt 0
Y( s ) L[ y( t )] y( t ) L1[Y( s )]
式中 s 是复变量 y(t) 1 jwy(s)est ds
2j jw
s j 是收敛因子,为角频率
若系统的初始条件均为零,对式(2.1)作拉氏变换得
Y s an s n an1s n1 a1s a0 X s bm s m bm1s m1 b1s b0
本章主要讨论测量系统及其与输入、输出的关 系,掌握测量系统静态、动态特性的评价和特性参 数的测定方法,尤其是测量系统的频率响应函数的 物理意义;熟悉测量系统在典型输入下的响应和实 现不失真测试的条件;正确地选用仪器设备来组成 合理的测量系统。
重点、难点:测量系统的传递函数与频率响应函 数的定义及一、二阶系统对典型输入的响应;不失 真测试条件;测量系统动态特性的测试。
线性系统性质:
1、叠加性
系统对各输入之和的输出等于各单个输入的输出之
和,即
若 x1(t) → y1(t),x2(t) → y2(t)
则
x1(t)±x2(t) → y1(t)±y2(t)
2、比例性
常数倍输入所得的输出等于原输入所得输出的常数倍,
即:
若
x(t) → y(t)
则
kx(t) → ky(t)
输出将为同一频率的谐波信号,即
若
x(t)=Acos(ωt+φx)
则
y(t)=Bcos(ωt+φy)
线性系统的这些主要特性,特别是 符合叠加原理和频率保持性,在测量工 作中具有重要作用。
2.2测量系统的静态特性
测量系统的特性分为静态特性和动态特性。如果测 量系统的输人和输出不随时间变化或变化极慢时称为静 态特性。微分方程式(2.1)中输入和输出的各阶导数均为 零,于是,有
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
静态测量和动态测量
①
0.15
In-plane displacement D /μm
0.1 0.05 0 -0.05 0 -0.1 -0.15 -0.2 -0.25 -0.3 -0.35 Y axis motion X axis motion 50 100 150 200 250 300 350 400
Motion Phase /°
8
2.2 测试系统的组成
被测 对象 被测量 传感器 信号调理 信号分析 处理 结果显示 打印记录
②
传感器:将被测特征量转换成电量信号
信号调理:将传感器所得的信号进行放大、滤波、调制和解调等处理,转变为 适合传输或后续处理的信号
信号分析处理:将调理后的信号送入计算机或微处理器做进一步的分析处理, 如小波变换、频谱分析等
23
示值误差、最大允许误差、引用误差
③
测量仪器的[示值]误差:测量仪器示值与对应输入量 的真值之差
由于真值不能确定,实际上用的是约定真值 此概念主要应用于与参考标准相比较的仪器 就实物量具而言,示值就是赋予它的值
[测量仪器的]最大允许误差:对给定的测量仪器,规 范、规程等所允许的误差极限值
精密测试理论与技术
胡晓东 教授 xdhu@ 天津大学精密仪器与光电子工程学院
第二章 测试系统
测量方法的分类,测试系统的组成及静、动态特性
2.1 测量方法的分类
①
测量原理:测量的科学基础
长度测量:光干涉原理 速度测量:多普勒效应
测量方法:进行测量时所用的,按类别叙述的一组操 作逻辑次序
相对误差(relative error)
由于真值不能确定,实际上用的是约定真值 相对误差只有大小和符号,而无量纲,一般用百分数来表示 当被测量值相差较大时,用相对误差才能进行有效的测量水平比较
无量纲量
21
真值和约定真值
③
真值(true value):与给定的特定量的定义一致的值
27
灵敏度、鉴别力、分辨力
③
灵敏度(sensitivity):测量仪器的响应变化除以对应 的激励变化
对于线性系统,灵敏度与输入量的大小无关,是常数,可用测量仪 器在稳态下输出增量与输入变化量之比来表示,即拟合直线的斜率; 对于非线性误差较大的测量仪器,灵敏度与输入量的大小有关,应 该用仪器输出量对输入量的导数来表示,或用某一较小输入量区域 的拟合直线斜率表示。
又称:测量仪器的允许误差限
[测量仪器的]引用误差:测量仪器的误差除以仪器的 特定值
该特定值一般称为引用值,例如,可以是测量仪器的量程或 标称范围的上限(此时可称为满量程误差)
24
误差(测量仪器)举例(1)
③
示值误差:被检电流表的示值I为40A,用标准电流表检 定,其电流实际值为41A,那么示值40A的误差=40-41 =-1A 最大允许误差:测量上限大于1000mm的游标卡尺,国 家计量检定规程规定的最大允许误差
测试系统的输出—输入特性是测试系统的最基本传递
特性,系统的各种性能指标都是根据其输出和输入的
对应关系来描述的
静态特性:当被测量不随时间的变化而变化或变化十分缓慢 时,输出和输入量之间的关系
动态特性:当被测量是瞬态值或随时间的变化值时,系统的 输出信号(响应)和输入信号(激励)之间的关系
18
2.3.1 测试系统的静态特性
量的真值只有通过完善的测量才有可能获得 真值按其本性是不确定的
约定真值(conventional true value):对于给定目的具 有适当不确定度的、赋予特定量的值,有时该值是约定 采用的
约定真值有时称为指定值、最佳估计值、约定值或参考值 常常用某量的多次测量结果来确定约定真值
22
测量仪器的准确度(accuracy
重复性、稳定性、漂移
③
重复性(repeatability):在相同测量条件下,重复测 量同一个被测量,测量仪器提供相近示值的能力
相同的测量程序 相同的观测者 相同条件下使用相同的测量设备 相同地点 在短时间内重复
稳定性(stability):测量仪器保持其计量特性随时间 恒定的能力
接触测量和非接触测量 直接测量和间接测量 绝对测量与相对测量 在线测量和离线测量(原位测量和离位测量) 静态测量和动态测量
3
测量原理有时也存在称为测量方法的习惯
接触测量和非接触测量
Frame Grabber Digital CCD Camera NanoPositioner Controller Zoom Lens
对(传感器输出的)信号进行变换、隔离、滤波、放大 、驱动等,以便进一步传输和处理
高阻输入、低阻输出 规范输出
• • • •
通道:1 输入电荷量:≤104pC 增益:1-1000mV/pC 输出:±5V
B&K 测量放大器2525 •放大、自动量程 •低通和高通滤波器(用户自定义)
14
滤波单元
2.2 测试系统的组成
eL
max 100% YFS
30
回程误差
③
回程误差是指在相同条件下,测量仪器正(输入量增 大)反(输入量减小)行程期间,输出-输入曲线的 不重合程度
这种现象称为迟滞,往往是由磁性材料的磁滞、弹性材料的 变形迟滞、机械结构的摩擦及间隙等原因引起的 测量时输入量要增大和减小各一次,再将两测量结果算术平 均来减小回程误差的影响
鉴别力(discrimination):使测量仪器产生未察觉的响 应变化的最大激励变化,这种激励变化应缓慢而单调地进 行
测量仪器处于工作状态
[显示装置的]分辨力(resolution):显示装置能有效辨 别的最小的示值差
28
测量仪器可处于不工作状态
通常模拟式显示装置的分辨力为标 尺分度值的一半,数字式显示装置 的分辨力为末位数字的一个数码
③
测量范围、量程
测量仪器的准确度、准确度等级
示值误差、最大允许误差、引用误差 灵敏度、鉴别力、分辨力 重复性、稳定性、漂移 线性度
19
测量范围与量程
③
标称范围(nominal range):测量仪器的操纵器件调到 特定位置时可得到的示值范围
标称范围的下限称为最小值 标称范围的上限称为最大值 标称范围:用下限和上限表示的区间
Extender and Collimating Lens Aperture Stop
①
LED
NanoPositioner
Beam Splitter Longworkingdistance Objective Longworkingdistance Objective
Polariod
Reference Mirror
32
极限条件-额定操作条件-参考条件
2.3.2 测试系统的动态特性
③
测试系统(仪器)的动态特性是指系统对随时间变化 的输入量的响应特性,是系统的输出值能够真实地再 现变化着的输入量能力的反映
理论上,输出—输入具有相同类型的时间函数
实际上,输出信号不会与输入信号具有完全相同的时间函数
响应时间(response time):激励受到规定突变的 瞬间,与响应达到并保持其最终稳定值在规定极限内 的瞬间,这两者之间的时间间隔
Micro-Device Positioning Stages Controller XYZ Precision Positioning Stages
4
直接测量和间接测量
①
微悬臂梁和微泵谐振频率的自由衰减法测试 纳米线材料的力学特性测量
5
绝对测量与相对测量
①
6
在线测量和离线测量
①
7
原位测量和离位测量
20
测量范围要小于等于标称范围
误差的定义
③
[测量]误差 (error [of measurement])
测量结果减去被测量的真值
由于真值不能确定,实际上用的是约定真值 当有必要与相对误差相区别时,有时称为测量的绝对误差
误差=测得值-真值 误差由多个误差分量组成 测量误差除以被测量的真值
加速度传感器
智能式压力变送器 常用的涡流探头+前置器
力传感器
12
2.2 测试系统的组成
传感器技术
信息采集——“感官”
信号处理技术
信息加工——“甄别”
一体化 传感器 智能 传感器 网络化 传感器
计算机技术
信息综合——“大脑”
网络技术
信息传输——“神经”
13
2.2 测试系统的组成
信号调理
信号处理
对来自信号调理环节的信号,进行各种运算、分析,并 输出结果
模拟信号处理 运算:微分、积分、对数 数字信号处理 信号量化 编程处理:信号分析
15
显示记录
以观察者易于识别的形式来显示测量的结果,或者将 测量结果存储
16
举例:测速系统方框图
②
17
2.3 测试系统的静、动态特性
③
满量程(Full scale)误差:0.05%FS
采用引用误差表述测量仪器的准确度等级:指示式电工仪表分为0.1,0.2, 0.5,1.0,1.5,2.5,5.0七个准确度等级,都是仪表最大允许误差除以量 程的百分数(%)来表示的