多晶体塑料变形的特点
多晶体塑性变形

一般在室温使用的结构材料都希望获得细小而均
匀的晶粒。 因为细晶粒不仅使材料具有较高的强度、硬度, 而且也使它具有良好的塑性和韧性,即具有良好的 综合力学性能。
细晶强化是唯一的一种在增加材料强度的同时
也增加材料塑性的强化方式。 但是由于细晶强化所依赖的前提条件是晶界阻 碍位错滑移,这在温度较低的情况下是存在的。
扩散性蠕变和晶界滑动是多晶体高温时的主要变形方式。
问题:说明多晶体金属变形过程的特点?
• (1)多晶体可以通过多种方式发生塑性变形,除了滑移和 孪生外,在高温下,还有晶界滑动和迁移、点缺陷的扩散性 蠕变。 • (2)多晶体变形需要至少开动5个滑移系,变形过程中出现
交滑移。
• (3)与单晶体相比,多晶体的塑性变形更加不均匀,由于 晶界的约束作用,晶粒中心区域的滑移量大于晶界附近区域 的滑移量。 • (4)晶界对塑性变形有一定的影响。
同的各个晶体所受应力并不一致。
处于有利位向的晶粒首先发生滑移,处于不利方位的晶
粒却还未开始滑移。
但多晶体中每个晶粒都处于其他晶粒包围之中,它的变 形必然与其邻近晶粒相互协调配合,不然就难以进行变形, 甚至不能保持晶粒之间的连续性,会造成空隙而导致材料的 破裂 。
为了使多晶体中各晶粒之间的变形得到相互协调与配合,
由于晶界可以阻碍位错运动,因此晶界的存在可以使多晶体抵
抗塑性变形的外力也增加,即增加材料的强度。 晶界数量直接决定于晶粒的大小,晶粒越小,晶界越多。
实践证明,多晶体的强度随其晶粒细化而提高。多晶体的屈
服强与晶粒平均直径d的关系可用著名的霍尔—佩奇(Hall-Petch) 公式表示:
式中 0 反映晶内对变形的阻力,相当于单晶的屈服强度; K反映晶界对变形的影响系数,与晶界结构有关。
晶体的塑性形变

28
取向的表示方法 在实际描述晶体取向时,常设定参考系的3个轴为轧制方向 在实际描述晶体取向时,常设定参考系的 个轴为轧制方向 (RD),轧制面的法向 轧制面的法向(ND)以及轧板的横向 以及轧板的横向(TD)。另外, 在描述晶 轧制面的法向 以及轧板的横向 。 另外, 体取向时也不一定采用3个晶轴 而是采用某一晶面{hkl}的法线 个晶轴, 体取向时也不一定采用 个晶轴,而是采用某一晶面 的法线 晶面上的某一晶向[uvw]在参考坐标上的取向来描述。 在参考坐标上的取向来描述。 、晶面上的某一晶向 在参考坐标上的取向来描述 取向与织构的区别: 取向与织构的区别: 多晶中晶粒取向的(择尤)分布。 多晶中晶粒取向的(择尤)分布。 单与多的关系。 单与多的关系。
5
晶界存在引起强度增加的原因:
双晶试验表明,试样的屈服强度随2个晶粒取向差加大而加大 ;把取向差与强度的关系曲线外推到取向差为零时,屈服强度大 体和单晶的各种取向的屈服强度的平均值接近。 说明晶界本身对强度的贡献不是主要的,而对强度的贡献主 要来自晶粒间的取向差。因相邻晶粒取向不同,为保持形变时应 变连续,各晶粒形变要协调,在晶界附近会进行多系滑移,如下 图的铝多晶形变。 正是这些多系滑移增加了形变阻力,从而增加强度。
3
铝多晶体拉伸形变试验
基本规律: (1)跨过晶界的延伸率变化是连续的; (2)靠近晶界处的延伸率较小; (3)细晶粒形变较均匀且强度高; 相反,大晶粒形变不均匀,强度低。
4
晶粒尺寸与屈服强度的关系
Hall-Petch关系 σ0称晶内阻力或晶格摩擦力; ky 是和晶格类型、弹性模量、位错分 布及位错被钉札程度有关的常数。 除屈服强度外,流变 应力、断裂强度等与晶 粒尺寸间也有H-P关系, 但σ0与ky常数的意义及数 值不同。H-P关系可用位 错理论或其它方法。 导出。
多晶体的塑性变形机制

多晶体的塑性变形机制在固体力学中,塑性变形指的是材料在受力作用下发生永久形变的过程。
对于多晶体材料,其晶粒的排列会对塑性变形机制产生较大影响。
本文将介绍多晶体塑性变形机制的基本原理,并探讨晶界、位错和滑移等因素在多晶体塑性变形中的作用。
1. 多晶体的结构特点多晶体是由许多晶粒组成的材料,每个晶粒是由同一个晶体结构的晶体单元组成。
晶粒之间的结合称为晶界,晶界的存在对塑性变形机制具有重要的影响。
2. 晶界的作用晶界是晶粒之间的界面,其结构与晶体内部的结构存在差异。
晶界可以阻碍晶体的滑移,限制晶体的塑性变形。
晶界的特殊结构使得晶粒在受力作用下不易发生滑移,从而增加了材料的强度。
此外,晶界还会影响晶体的晶粒生长和晶界迁移,在材料加工和成形过程中起到重要的作用。
3. 位错的作用位错是晶体中的一种缺陷,是晶体结构中的原子偏差或错配。
位错的运动可以引起晶格的畸变和滑移,进而导致材料的塑性变形。
在多晶体材料中,位错在晶粒之间传播并产生滑移,从而实现材料的塑性变形。
位错对材料的强度和韧性有重要影响,是塑性变形机制中不可忽略的因素。
4. 滑移的机制滑移是在晶粒内的位错运动引起的晶体形变。
晶体中存在多个滑面和滑矢量,滑面是晶格面,滑矢量是晶体内位错移动的方向。
当外力作用于晶体时,位错从一个滑面滑移到另一个滑面,这样就实现了晶体的塑性变形。
滑移是晶格错配的唯一处理方式,也是多晶体材料的主要塑性变形机制之一。
5. 多晶体塑性变形的机制综合在多晶体材料中,晶界、位错和滑移是相互关联的,共同作用于塑性变形过程中。
晶界的存在会阻碍滑移,从而提高材料的强度。
位错则通过滑移在晶粒内传播,使得晶体发生塑性变形。
滑移的方向和滑面的选择对材料的塑性变形具有重要影响。
通过合理控制晶粒结构、晶界性质和位错密度等因素,可以调控多晶体材料的塑性变形机制,从而提高材料的塑性和韧性。
总结:多晶体材料的塑性变形机制是一个复杂的过程,涉及晶界、位错和滑移等因素。
机械制造基础第二版课后答案邱亚玲第十一章

机械制造基础第二版课后答案邱亚玲第十一章第十一章锻压习题解答11-1多晶体塑性变形有何特点?答:多晶体塑性变形有的特点:①变形分为晶内变形和晶间变形两种。
②多晶体塑性变形首先在那些最有利于变形位向的晶粒中进行。
③各晶粒变形不均匀,每个晶粒内变形也不一致。
11-2何谓冷变形强化?冷变形强化对金属组织性能及加工过程有何影响?答:金属在低温下进行塑性变形时,随着变形程度的增加,金属的硬度和强度升高,而塑性、韧性下降,这种现象称为金属的冷变形强化或加工硬化。
冷变形强化时,金属内对称面附近的晶格发生畸变,甚至产生晶粒破碎现象,金属的强度和硬度越来越高,而塑性和韧性越来越低,变形抗力越来越大,变形也越困难,需要更大的变形力。
11-3何谓金属的再结晶?再结晶对金属组织和性能有何影响?答:将变形金属加热到该金属熔化温度的0.4倍时,金属原子具有更强的的扩散能力,以碎晶块或其它质点为晶核,成长出与变形前晶格结构相同的新的等细晶粒,这个过程称为再结晶。
再结晶可以完全消除塑性变形变形所引起的硬化现象,并使晶粒得到细化,力学性能甚至比塑性变形前更好。
11-4冷变形和热变形的区别是什么?试述它们各自在生产中的应用。
答:据变形温度和变形后的组织不同,通常把在再结晶温度以下进行的变形称为冷变形,在再结晶温度以上进行的变形称为热变形,冷变形的金属表现出加工硬化现象,热变形金属的加工硬化随即被再结晶所消除。
冷变形如冷轧、冷挤、冷拔、冷冲压。
冷变形后金属得到强化,并且获得的毛坯和零件尺寸精度、表面质量都很好。
热变形如热模锻、热轧、热挤压等。
热变形后获得的毛坯和零件的力学性能(特别是塑性和冲击韧度)很好。
11-5何谓金属的可锻性?影响可锻性的因素有哪些?答:可锻性指金属材料在压力加工时,获得优质零件难易程度的性能。
可锻性受材料本身的性质(如化学成分、组织状态)和外界加工条件(如变形温度、变形速度、应力状态)等因素的影响。
11-6钢的锻造温度是如何确定的?始锻温度和终锻温度过高或过低对锻件质量有何影响?答:1、始锻温度一般控制在固相线以下150~250℃。
多晶体的塑性变形

要为弹性相互作用和化学相互作用。
弹性相互作用是溶质原子在刃型位错周围聚集分布,形成 柯氏气团。 化学相互作用是溶质原子在层错中的偏聚形成铃木气团。 柯氏气团和铃木气团都对位错的运动起到钉扎作用,阻碍 了位错运动,因此起到了强化合金作用。
(2)屈服现象与应变时效
图为低碳钢拉伸应力应变曲线,在这根曲线上出现了明显
的上下屈服点和屈服伸长。
产生吕德斯带后,应力应变曲线正常规律变化。
屈服现象及原因
屈服现象是指某些金属尤其是体心立方金属在拉伸时,存 在明显的、确定的上、下屈服极限。 在拉伸应力小于上屈服极限时完全是弹性变形,应力应变
曲线成直线。
而在拉伸应力达到上屈服极限时发生明显的塑性变形,且
多晶体试样经拉伸后,每一晶粒中的滑移带都终止
在晶界附近。
因此对多晶体而言,要使第二晶粒滑移,外加应力
必须大至足以激发大量晶粒中的位错源动作,产生
滑移,才能觉察到宏观的塑性变形。
由于晶界可以阻碍位错运动,因此晶界的存在可以使多 晶体抵抗塑性变形的外力也增加,即增加材料的强度。 晶界数量直接决定于晶粒的大小,晶粒越小,晶界越多。 实践证明,多晶体的强度随其晶粒细化而提高。多晶体
此外在高温时,多晶体还可能出现另一种称为扩散性蠕
变的变形机制,这个过程与空位的扩散有关。多晶体的晶粒 越细,扩散蠕变速度就越大。 扩散性蠕变和晶界滑动是多晶体高温时的主要变形方式。
问题:说明多晶体金属变形过程的特点?
(1)多晶体可以通过多种方式发生塑ห้องสมุดไป่ตู้变形,除了滑移和 孪生外,在高温下,还有晶界滑动和迁移、点缺陷的扩散性 蠕变。
吕德斯带与滑移带不
多晶体的塑性变形
滑移
孪生
相同点 晶体位向
1 切变;2 沿一定的晶面、晶向进行;3 不改变结 构。
不改变
改变,形成镜面对称关系
位移量
滑移方向上原子间距的 小于孪生方向上的原子间
整数倍,较大。
距,较小。
不
同 对塑变的贡献 很大,总变形量大。 点
有限,总变形量小。
变形应力
有一定的临界分切压力 所需临界分切应力远高于
滑移
变形条件
多晶体的塑性变形
28
晶界对塑性变形的影响
Cu-4.5Al合金晶 界的位错塞积
多晶体的塑性变形
29
晶粒大小对塑性变形的影响
实验表明,多晶体的 强度随其晶粒的细化 而增加。
Hall-Patch关系:
1
s 0 kd 2
屈服强度与晶粒尺寸的关系图
多晶体的塑性变形
30
(2)多晶体金属的塑性变形过程
多晶体中首先发生滑移的是滑移系与外力夹角等于或接近 于45°的晶粒。当塞积位错前端的应力达到一定程度,加上相邻 晶粒的转动,使相邻晶粒中原来处于不利位向滑移系上的位错 开动,从而使滑移由一批晶粒传递到另一批晶粒,当有大量晶 粒发生滑移后,金属便显示出明显的塑性变形。
因为晶粒越细,单位体积内晶粒数目越多,参与变
形的晶粒数目也越
多,变形越均匀,
脆性 材料
使在断裂前发生较
塑性材料
大的塑性变形。强
度和塑性同时增加,
金属在断裂前消耗
的功也大,因而其
韧性也比较好。
应变
多晶体的塑性变形
35
通过细化晶粒来同时 提高金属的强度、硬 度、塑性和韧性的方 法称细晶强化。
多晶体的塑性变形
多晶体的塑性变形
金属单晶体与多晶体的塑性变形

1. 弹性变形与塑性变形弹性变形金属如果受应力较低,金属内原子间的方位与距离只产生微小的变化,当外力去除后原子会自行返回原位,变形随即消失。
塑性变形:当金属所受应力达到和超过某临界值(屈服强度),除了产生弹性变形外,还会产生卸载后不可恢复的永久变形。
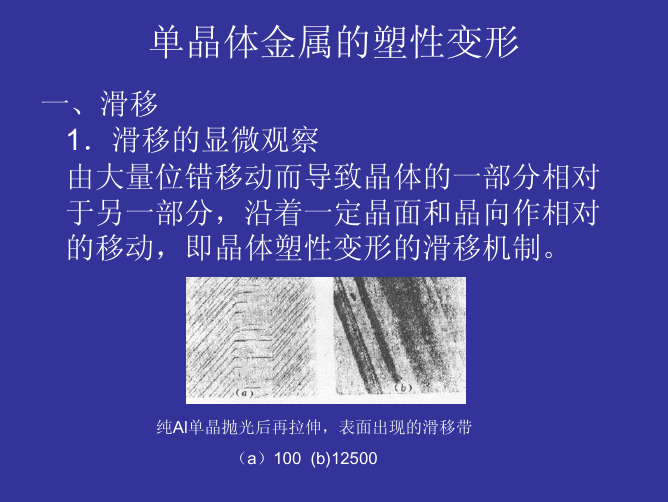
滑移在外力作用下,晶体中一部分晶体相对于另一部分晶体沿着一定晶面产生相对滑动。
金属最重要的塑性变形机制。
滑移孪生孪生在外力作用下,晶体中一部分晶体相对于另一部分晶体沿着一定晶面产生相对转动。
1)滑移在超过某临界值的切应力下发生。
2)滑移常常沿晶体中最密排面及最密排方向发生。
此时原子间距最大,结合力最弱。
晶面间距示意图有缘学习更多+谓ygd3076或关注桃报:奉献教育(店铺)滑移系: 滑移面(密排晶面)+滑移方向(密排晶向)较多的滑移系意味着有较好的塑性实际晶体的滑移机制: 依靠位错滑移。
如果晶体中存在位错,那么塑性变形 依靠位错的滑移进行,比依靠滑移面两侧晶体的整体滑动,阻力小得多。
塑性变形的位错滑移机制示意图3)滑移在晶体表面形成滑移线和滑移带滑移线和滑移带示意图滑移带金相照片有缘学习更多+谓ygd3076或关注桃报:奉献教育(店铺)2. 单晶体塑性变形:孪生机制孪生孪生面孪晶密排立方和体心立方的金属容易发生孪生变形;一般金属在低温和冲击载荷下容易发生孪生变形。
3. 多晶体的塑性变形•各晶粒在变形过程中相互约束;•大量晶界的存在对位错运动形成障碍。
3. 多晶体的塑性变形:晶粒取向对塑性变形的影响•软取向晶粒在一定的外加应力下能够滑移变形的晶粒;•硬取向晶粒在一定的外加应力下不能滑移变形的晶粒多晶体的塑性变形存在很大的微观不均匀性,并且变形抗力明显高于单晶体。
有缘学习更多+谓ygd3076或关注桃报:奉献教育(店铺)3. 多晶体的塑性变形:晶界对塑性变形的影响细晶强化(晶界强化)晶界阻碍位错的通过,产生强化效果。
晶界越多,即晶粒越细小,不仅材料强度越高,而且由于增加晶粒数量,使得软取向晶粒更多,分布更均匀,改善微观变形的不均匀性,从而改善材料的塑性。
多晶体、单晶体金属的塑性变形
(3) bcc 滑移方向为<111>,可能出现的滑移面有 {110}、{112}、{123}如果三组滑移面都能启 动,则潜在的滑移系数目为
临界分切应力 (1)最大分切应力正好落在与外力轴成45o 角的晶面以及与外力轴成45o角的滑移方向上。 假设对一个单晶圆柱体试样作拉伸试验 ,滑 移面的面积 作用在此滑移面上的力
• 处于有利位向的晶粒开始发生塑性变形,说明它 的滑移面上的位错源已经开动,位错沿滑移面向 晶界移动,在晶界处受阻,形成位错的塞积群。 位错的赛积群会在其前沿区域造成很大的应力集 中,随着外加载荷的增大,应力集中也随之增大。 这一应力集中值与外加应力共同作用,会使附近 晶粒的某些滑移系上的分切应力达到临界切应力 值,于是位错源开动,开始塑性变形。同时,由 于先滑移晶粒在发生滑移的同时会出现晶体的转 动,为了与先变形晶粒相协调,就要求相邻晶粒 的滑移应该在几个滑移系同时进行,保证其形状 作相应的改变。晶粒之间也要作相对的滑动来进 行协调。
压缩 压缩时晶体的滑移面, 力图转至与压力方向 垂直的位置。
• 孪生 • 塑性变形的另一种重要形式是孪生。它是晶体在 切应力的作用下,晶体的一部分沿一定的结晶面 (孪晶面或孪生面)和一定的晶向(孪生方向) 相对于另一部分晶体作均匀地切变的现象。在切 变区域内,与孪晶面平行的每层原子的切变量与 它距孪晶面的距离成正比,并且不是原子间距的 整数倍。这种切变不会改变晶体的点阵类型,但 可以使变形部分的位向发生变化,并与未变形部 分的晶体以孪晶面为分界面构成了镜面对称的 位 向关系。
• 由吕德斯带形成过程可知,它的产生必须 具备下列条件: (1)金属有屈服现象,即金属处于退火状态。 (2)冲压加工时,金属在屈服阶段产生较小 的变形量。
非均匀屈服理论
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多晶体塑料变形的特点
多晶体塑料(Polyethylene)是由多个聚乙烯链相互交织而成的聚合物,在应力的作用下,其分子链会发生变化,产生一定的形变和应力分布。
多晶体塑料变形的主要特点如下:
1.非线性变形:多晶体塑料在变形过程中,形变与应力之间的关系是非线性的。
即使在小应力范围内,它也会出现塑性形变,并通过交链运动、聚合物链的扭曲、链段在晶粒间的滑移等方式实现变形。
2.低强度:相比于其他金属材料和聚合物材料,多晶体塑料的强度相对比较低,并且在应变速率较高时出现应力集中,容易导致失效。
3.膨胀性:多晶体塑料的热膨胀系数比较大,在高温下容易发生膨胀变形,因此在高温下需采取额外的措施以避免变形。
4.非均匀变形:多晶体塑料的变形在空间和时间上都是非均匀的,因为它的分子结构不够紧密,容易出现局部变形,在某些表面上会出现鱼鳞状破裂,导致剪切破坏。
5.可逆性:多晶体塑料具有一定的可逆性,即当外力消失后,它有能力恢复到原来的形状,但由于分子链分布的不均匀性,不同程度的形变和塑性留存往往也会发生。
6.可加工性:由于其分子链的松散性,多晶体塑料的加工性较好,可以进行注塑成型、挤出成型、吹塑成型、压延成型等多种成型方式。