立体车库随机车位分配与就近车位分配仿真及分析
立体车库车位分配模型与仿真分析

立体车库车位分配模型与仿真分析王小农; 李建国; 贺云鹏【期刊名称】《《测试科学与仪器》》【年(卷),期】2019(010)004【总页数】10页(P369-378)【关键词】立体车库; 车位分配; 粒子群算法; 灰色神经网络算法; 就近分配原则【作者】王小农; 李建国; 贺云鹏【作者单位】兰州交通大学自动化与电气工程学院甘肃兰州 730070【正文语种】中文【中图分类】U491.7; TP2740 IntroductionAutomated stereo garage is a comprehensive product of automation technology and industry development. As an important tool to reduce traffic pressure, it is a comprehensive automation system which integrates storage with retrieval of the vehicle. The operational efficiency of an automated stereo garage is directly related to the economic cost of the operator and the customer satisfaction. Therefore, it is urgent to improve the operational efficiency of automated stereo garages. The research on automated stereo garage efficiency mainly includes the following twoaspects: 1) allocation of parking spaces, 2) work scheduling.At present, many scholars have done a lot of research on the improvement of automated stereo garage efficiency. Xia et al. used the improved genetic algorithm to study the access vehicle scheduling in the stereo garage and then used the mixed coding and improved sequential crossover to optimize the access sequence of the vehicle[1]. Lv et al. designed an intelligent access vehicle control algorithm[2] by using mutual exclusion principle to ensure the parallel working of multiple transport vehicles. In addtition, the benefit prioritization algorithm was used to achieve optimal economic efficiency, improve the efficiency of access vehicles and shorten vehicle access time. Sun et al. improved crossover operator genetic algorithm and optimaized the access vehicle schedulings of three different storage capacities in roadway stacking stereo garage, respectively[3]. Pan proposed a mathematical optimization model of the layout and cost of automated stereo garage, which provided a scientific basis for quantitative analysis of stereo garage arrangement[4]. Yang et al. establised a solid and mathematical model of automated stereo garage[5]. Zuo et al. proposed three automated stereo garage access strategies: retrieval vehicle priority strategy, stand strategy in situ and cross-access strategy and analyzed vehicle length in different access strategies. Based on the traditional scheduling method and the number of stacking machines, a new scheduling strategy is proposed by combining the corresponding access strategy with the running speed of the stackers according to the change in vehicle arrival rate to improve stereo garage efficiency[6]. Wei proposed avehicle access strategy of automated stereo garage based on the improved genetic algorithm, hybrid coding and adaptive crossover mutation probability[7]. Kuo et al. proposed a two-objective weight method to optimize the vehicle access strategy. Considering transaction waiting time and vehicle utilization, a cycle time model was established[8]. Fukunari et al. proposed an approximate cycle time model for conceptualized automatic storage & retrieval system (AS/RSs) by using random storage and opportunistic pairing of storage & retrieval (S/R) transactions[9]. According to queuing theory, after analyzing stereo garage queuing process, liang proposed a parking and service window queuing model[10]. Based on relevant parameters, the optimal parking space scale and service windows number of parking garage are estimated. Taking automated warehouse as a research object, according to key location allocation principle, li et al. proposed a dynamic location optimization model[11]. By comparing the existing optimization algorithms and multi-objective genetic algorithms, lu proposed a multi-objective genetic algorithm based on weight coefficient transformation method to solve the model.It can be found that the above research on stereo garage efficiency is mainly from a unilateral consideration: 1) optimization of vehicle access sequence, 2) optimization of vehicle scheduling using algorithm, 3) combination and optimization of different access strategies, and 4) optimization of automated stereo garage layout and cost. But the improvement of stereo garage efficiency not only needs to consider theabove unilateral optimization, but also need to consider vehicle stay time in the garage and the global search ability of the algorithm when the parking spaces are optimized.In order to solve the above shortcomings, this paper presents a decision model of parking space allocation and simulates the efficiency of automated stereo garage based on grey neural network and particle swarm optimization algorithm. Firstly, the movement status of the automated stereo garage in a real environment is described, and the principle and evaluation indexes of automated stereo garage allocation are introduced. Secondly, the vehicle stay time in the stereo garage is predicted by grey theory and neural network algorithm. Finally, particle swarm optimization algorithm is used to realize the parking space allocation in stereo garage owing to its global optimization ability. By comparing the efficiency indexes of the existing model based on near-distribution principle, it can be found that the propose model has better feasibility and higher operation efficiency.1 Description of stereo garage movement stateThe automated stereo garage in real environment is shown in Fig.1.Fig.1 Stereo garage modelThe stereo garage capacity is 9 layers×21 columns and has a total of 376 parking spaces. There are two I/O ports in the stereo garage, located at layer 9 column 10 and layer 9 column 11, respectively. There are two automated vehicles (AVs) in the stereo garage, which are AV1 and AV2, respectively. The AV movement direction is in the horizontal direction andthe movement is between columns. In the AS/RS system, there are two services types: storage of the vehicle and retrieval of the vehicle. For storage of the vehicle, the AV first loads the vehicle from the I/O port and then stores it the parking space of pre-system allocation. Similarly, for retrieve of the vehicle, the vehicle is fetched by AV from the parking space to the I/O port. AV is the core equipment in automated stereo garage operation and it has a direct impact on normal and efficient operation of automated stereo garage. In the AS/RS system, the steps of storage tasks are first starting the I/O position and then storing the vehicle to the designated parking space,while the steps of retrieval tasks are starting the storage vehicle location and then transporting the vehicle to the I/O position. The AV motion can realize the movement between the columns in the same layer. The movement between layers can be realized by lift. The automated stereo garage is equipped with two lifts: Lift1 and Lift2, whose movement direction is only vertically up and down.The vehicle arrival time is the duration in which the vehicles arrive outside the garage from the external environment and then the arrival vehicles enters into the AV and Lift queues in chronological order. If AV is idle, AV will enter into the process of vehicle service; if AV is busy, customers have to wait for the AV. For storage of the vehicle, the service time of AV is the duration in which the AV moves from the current location to the I/O port and then the AV carries the vehicle to the specified parking space. For retrieve of the vehicle, service time of AV is the duration in which the Av moves from the current location to the parking port of the vehicle andthen transports it to the I/O por. Thus, the AV complete storage/retrieve task is that the AV carries the vehicle from the I/O port to the pre-system allocated storage parking space or from the parking space of the vehicle to the I/O port. The complete execution task of Lift is that the Lift delivers the AV from the AV layer to the destination layer.The automated stereo garage model can be described as follows: When the customer is ready to storage the vehicle, the stereo garage control system first determines whether there are idle parking spaces in the garage. If there are idle parking spaces, the stereo garage control system assigns a storage parking space (row, column, side) to the current vehicle. If there is no parking space, the customer leaves. If the assigned parking space is Floor 9, Side 2 and the AV is idle, the current vehicle will be stored in the pre-assigned parking space. If the AV is busy, the current vehicle waits for the AV. If the assigned parking space is on the other layer, column, side and the AV is idle, the control system first judges whether there is Lift idle. If Lift is idle, the current AV carries the vehicle and the current idle Lift conveys the AV to the specified layer. If the AV is busy, the vehicle waits for the AV to be idle. The flow chart of storing the vehicle is shown in Fig.2. When the customer is ready to retrieve the vehicle, the stereo garage control system determines the vehicle parking space including the row, column and side. If the vehicle parking space is Floor 9, Side2 and if AV is idle, the current AVwill transport the vehicle to the I/O port. If the AV is busy, the current vehicle waits for the AV. If the vehicle is on the other layer, column, side and the AV is idle, the control systemdetermines whether there is Lift idle. If Lift is idle, the current idle Lift conveys the AV to the assigned layer. If Lift is busy, the vehicle waits for the AV. If the AV is busy, the current vehicle waits for the AV to be idle. The flow chart of retrieving the vehicle is shown in Fig.3.Fig.2 Flow chart of storaging the vehicleFig.3 Flow chart of retrieving the vehicle2 Establishment of model2.1 Principles of parking allocationStereo garage parking allocation mainly follows the following principles: 1) Principle of uniformity and stabilityFor excessive weight vehicle, centralized parking should be avoided because it may cause force uneven in the stereo garage. In addition, if the center of gravity of stereo garage is too high, the stability and safety of the stereo garage will become bad.2) Principle of high efficiencyThe vehicle should be allocated to the parking spaces closer or far from the garage entrance. Moreover, the parking time should be short.3) Principle of first come first serviceAccording to the control system order, the first arrival vehicle should be served first to avoid congestion and the prolonged waiting time of the customer.4) Principle of departure priorityWhen customer sends out retrieval order, it is important to ensure that the outbound vehicle receives the service with the shortest queue length andwaiting time.5) Principle of the lowest energy consumptionThe AV and lift movement paths affect energy consumption. The vehicle service should ensure that the AV and lift have the lowest energy consumption from the entrance/exit to the parking space to save resources and reduce operation costs.6) Principle of minimum running time. The running time of AV or lift is determined by the running path of AV or lift. The vehicle service should ensure that the AV or Lift runs from the entrance to the parking space in the minimum period, to improve operational efficiency.2.2 Mathematical model and evaluation indexesTaking the stereo garage model in Fig.1 as a research object, Fig.4 is the simplified model of the stereo garage in Fig.1(side2).The vehicle arrival time is the negative exponential with the parameter of λ, where λ is the mathematical expectation of the vehicle arrival interval. The smaller the λ, the higher the vehicle retri eval/storage frequency. The retrieval/storage vehicle process of automated stereo garage is stereo motion. The AV movement in the horizontal direction is defined as X and the vertical movement direction of lift is defined as Y. The automated stereo garage has m columns and n rows, a total of m×n locations. Vm is the average speed at which the AV moves in the X direction and Vn is the average speed at which the Lift moves in the Y direction. TL is Lift walking time in the Y direction and TA is AV walking time in the X direction. N and W are the width and height of the parking space, respectively. Thecoordinates of layer i, column j are (j×N,i×W). TL and TA can be obtained by(1)and the storage or retrieve time of the vehicle in layer i, column j isTij=max(TL,TA).(2)Fig.4 Simplified model of stereo garage in Fig.1The horizontal movement direction of AV and the vertical movement direction of Lift are approximately horizontal values and ordinate values, respectively. According to the principle of mechanics, vertical direction energy and horizontal direction energy of retrieving/storing the vehicle can be calculated by(3)where m is the vehicle mass, g is the gravitational acceleration, and P is the horizontal traction power of stereo garage motor.And the whole energy of retrieving/storing the vehicle can be calculated byWtotal=min(WL+WA).(4)Thus the optimization problem of parking space allocation in the automated stereo garage can be transformed into the optimal solutions of Eqs.(3) and (4).The customer average waiting time T is the ratio of the sum of the waiting time of the customers to be served to the total number N of the customers to be served, and it can be expressed as(5)where ti is ith customer’s waiting time and N is the total number of customers.The customer average waiting queue Q is the ratio of the sum of waiting queues of the customers to be served to the total number of the customers to be served, and it is expresssed as(6)where L(j) is jth customer waiting queue length.The average energy consumption of AV and Lift W is the ratio of the sum of AV and Lift energy consumptions to the total number of customers, and it is expresssed as(7)where W(i) is the energy consumption of the ith customer.The customer average service time S is the ratio of the sum of the customer service hours to the total number of customers, which is used to characterize the acceptance service time of each customer and calculated bywhere S(j) is the waiting time of the jth customer.3 Vehicle stay time prediction based on gray neural network3.1 Grey forecasting modelBecause a gray model can be established based on small amount of incomplete information and mathematical models, therefore it has advatages of less modeling information required, easy operation and high precision modeling[12]. The original data are given byx(0)={x(0)(1),x(0)(2),…,x(0)(n)}.(9)The data have the characteristic of randomness.The original data for 1-AGO processing are given byx(1)={x(1)(1),x(1)(2),…,x(1)(n)},(10)where x(1) satisfies the first-order ordinary differential equation as(11)where a is called the development gray number and u is called the control gray number.If t=t0, Eq.(11) satisfies the initial condition x(1)=x(1)(t0) and it is given by(12)According to the relevant hypothesis, the time response equation is given byk=1,2,…,n(13)The gray prediction modelling approach is obtained according to accumulative sequence in Eq.(10). The constants a and u are estimated by the least squares method. The fitting value is calculated by the time response equation. The prediction value is given by(14)According to the original data sequence set of customer stay time in the automated stereo garage in the real life, the prediction value of customer stay time based on gray model is shown in Fig.5.Fig.5 Prediction value of customer stay time based on gray modelThe abscissa is the customer number and the ordinate is the customer stay time corresponding to the different customer numbers.3.2 Neural network algorithm modelThe basic components of the neural network are artificial neurons and the model of the ith neuron is shown in Fig.6[13-14].Fig.6 Model of ith neuronIn Fig.(6), f(·) is called the activation function; Yi is the output of neuron i; X1-Xn are the input signals from the other neurons; Wij represents the connection weight from neuron j to neuron i; θ represents the offset; and input of neuron i is Xj(1≤j≤n). There areYi=f(Nnet(i)),(15)(16)where Nnet(i) means the total inputis, called net activation. It can be seen that the neurons are in a activated state when the net activation is positive and the neurons are in a inhibited state when the net activation is negative. In this simulation, we use the back propagation (BP) neural network learning algorithm. The core idea of instructor learning algorithm is to send the training set into the network. According to the difference between the actual output and the expected output of the network, the weight between the neurons makes the difference between the actual output and the expected output the minimum. The steps are as follows:1) Taking a sample (Oi,Ii) from the sample set;2) Calculating the actual output of neural network O;3) Calculating the output error C;4) According to C, neural network adjusts the weight vector matrix W;5) Repeating the above process for each sample set, the entire sample set error does not exceed the specified range of training. The weight vector matrix meets the required requirements.In this simulation, the customer stay time data set is used as the training sample of the BP neural network. BP neural network parameter settings are as follows:1) Nodes number set: input layer, hidden layer and the output layer nodes number are 1,3 and 1, respectively;2) Transfer functions: hidden layer (logsig function), output layer (purelin function);3) Training mode: traingdx.The BP neural network model as shown in Fig.7.Fig.7 BP neural network modelIn Fig.7, X is the customer serial number generated according to the customer arrival time and Y is the stay time corresponding to the customer in the stereo garage. The BP neural network predicts the customer stay time, as shown in Fig.8. The abscissa is the customer serial number assigned by the stereo garage control system, and the ordinate is the stay time corresponding to the different customer numbers.Fig.8 Customer stay time3.3 Realization of customer stay time predicted based on gray neural networkNeural network can approximate any nonlinear function on the premise that sample data can represent various situations; otherwise, the neural network will be distorted by training. The grey model makes the randomness of the original data weakened. The required samples and the regularity of the data are easy to find out. Gray neural network is combination of gray model and artificial neural network, which can improve the accuracy of prediction and solve the problem of complex uncertainties. Taking the actual customer stay time in an automated stereo garage as the original data set used for gray neural network. The combined data processing process of grey model and neural network isshown in Fig.9. The linear weight is calculated from outputs 2 and 3 by using the least squares method, and the weights of the grey model and the BP neural network model are 0.496 4 and 0.503 6, respectively.Fig.9 Combination model of grey model and neural networkBased on the grey neural network, the customer stay time prediction value is shown in Fig.10. By comparing Figs.5, 8 and 10, it can be seen that the prediction accuracy of customer stay time based on gray neural network is significantly higher than those based on the neural network and grey model, respectively.Fig.10 Grey neural network predicts customer stay time4 Realization of vehicle location based on particle swarm optimization4.1 Mathematical model of particle swarm algorithmParticle swarm optimization is to find the optimal solution in the search space[15-17]. The mathematical model of particle swarm algorithm is described as follows:The total number of particles is Num_count in the search space. The spatial dimension is D (interger). The vector position coordinates of the ith particle are Xi=(xi1,xi2,…,xiD)T,i=1,2,…,Num_count, Xi is a random solution of the optimization problem. The best position of the ith particle is called the best position of individual history. The vector position coordinates are Pi(pi1,pi2,…,PiD)T, i=1,2,…,Num_count. The positional transformation rate of each particle is Vi(vi1,vi2,…,viD)T,i=1,2,…,Num_count. The particle g is the best point among all the particles. The particle Pg=(Pg1,Pg2,…,PgD)T is the global optimal position in currentparticle search space. Each particle position can be updated by(17)where w is the inertia weight; C1 and C2 are called the acceleration factors; R1 and R2 meet the evenly distributed random number. For dimensiond(1≤d≤D), the range of the position change is [Xmin,Xmax] and the range of the position transformation rate is [Vmin,Vmax]. If the position change and position transformation rate exceed the boundary range in the iterative process, the ranges of the position change and position transformation rate are their respective boundary values.Realization of particle swarm algorithm includes the steps as forllows:1) In the initialization process, the random location and speed of the particle swarm are set;2) Fitness value of each particle is calculated;3) For each particle, its fitness value is compared with the fitness value pi of the best position. If pi is better, pi is considered as the current best position;4) For each particle, the fitness value is compared with the global position value of best experience. If global value is better, it is considered as the current best position;5) According to Eq.(17), the particle has evolved velocity and position;6) If end condition is not satisfied, the algorithm returns to step 2); otherwise, the algorithm perform step 7);7) Output global optimal value.4.2 Realization of vehicle location based on particle swarm algorithm After the prediction of the vehicle stay time, the simulation randomly generates 200 customers with negative exponential distribution and λ =5. The allocation efficiency indexes of parking spaces based on the nearest distribution principle are shown in Fig.11.It can be seen from Fig.11 that the average waiting time of the customer is 4.393 7 min, the average waiting queue is 4.515 0 ea, the average energy consumption of the AV and Lift is 33.995 8 kJ, and the average service time is 8.576 0 s.Fig.11 Efficiency index under the principle of the nearest distributionThe efficiency indexes of parking spaces based on particle swarm algorithm are shown in Fig.12.Fig.12 Efficiency index in particle swarm optimization modeIt can be seen from Fig.12 that the average waiting time of the customer is 0.609 5 min, the average waiting queue is 0.145 0 ea, the average energy consumption of the AV and Lift is 11.232 6 kJ, and the average service time is 6.774 0 s.Compared with the results based on the nearest distribution principle, when particle swarm optimization is utilized, the average waiting time of customers is reduced by 3.784 2 min, the average service time of customers is reduced by 1.802 0 s, the average energy consumption of the AV and Lift is reduced by 22.763 2 kJ, and the average waiting queue ofcustomers is reduced by 4.37 ea. Therefore, the particle swarm algorithm is suitable for parking space allocation and can greatly improve the efficiency of the garage.5 ConclusionTaking a stereo garage in real life as research object, a stereo garage operation model with first come and first service is established. The evaluation of automated stereo garage operation efficiency is given. It is proved that the particle swarm algorithm for parking space allocation is effective and can reduce the energy consumption. The combination model of gray theory and neural network has the advantages of two models. The overall prediction effect is obviously stronger than that of a single model. The prediction accuracy is improved and the customer stay time. In the future, we will take into account the scheduling problem between AV and Lift to allocate the parking spaces of the stereo garage and serve the modern social life.References【相关文献】[1]Xia T, Zhe B. Research on access scheduling of lifting and traversing cubic garage. Logistics Technology, 2015, 34(24): 138-140.[2]Lv H Z, Zhang L Y, Lian Z Z. Design of control algorithm for intelligent access vehicle. Software Engineer, 2015, 18 (12): 52-53.[3]Sun J Y, Wei Y H. Study on optimization of access control of automatic stereo garage. Logistics Technology, 2015, 34 (11): 296-298.[4]Pan Y F. Study on the ranking and cost optimization of automated stereo garage.Journal of Shanghai University of Electric Power, 2001, (1): 27-31.[5]Yang X F, Xiao H. Comparative analysis of access strategy of automated stereo garage. Machine Manufacturing and Automation, 2004, (5): 47-49.[6]Zuo W H, Jiang D J. Queuing and efficiency analysis of stereo garage. Journal of Chongqing Jiaotong University (Natural Science Edition), 2015, (4): 113-116.[7]Wei L. Based on the roadway stacking stereo garage vehicle access strategy algorithm. Chongqing: Chongqing University, 2014: 17-34.[8]Kuo P H, Krishnamurthy A, Malmborg C J. Design models for unit load storage and retrieval systems using autonomous vehicle technology and resource conserving storage and dwell point policies. Applied Mathematical Modelling, 2007: 312332-2346.[9]Fukunari M, Malmborg C J.An efficient cycle time model for autonomous vehicle storage and retrieval systems. International Journal of Production Research, 2008: 463167-3184.[10]Liang Y. Research on queueing model and scheduling optimization of automated stereo garage. Lanzhou: Lanzhou Jiaotong University, 2017: 12-19.[11]Li X, Zhu Y M. Modeling and simulation of dynamic placement allocation in automated stereoscopic warehouse. Logistic Technology, 2016, 39(3): 131-136. [12]Lu Y. Gray prediction model research and its application. Hangzhou: Zhejiang Technology University, 2014: 15-26.[13]Fan Z Y. BP neural network model and learning algorithm. Software Guide, 2011, (7):66-68.[14]Huang L. BP neural network algorithm improvement and application research. Chongqing: Chongqing Normal University, 2008: 23-36.[15]Yang W, Fu W P, Wang W. Based on multi-color set and particle swarm optimization of warehouse location in stereo warehouse. Mechanical Science and Technology, 2012, 31(4): 648-651.[16]Huang T A, Sheng J G, Xu H Y, et al. Improved simplified particle swarm optimization algorithm. Computer Simulation, 2013, 30(2): 327-330.[17]Li Y L. Based on multi-objective particle swarm algorithm optimization and its application. Nangjing: Southwest Jiaotong University, 2014: 26-37.。
巷道堆垛式立体车库随机车位分配策略仿真与分析
李建 国 蒋 兆远
l兰州 交通 大学机 电技 术研 究所 兰 州 7 0 7 300 2甘 肃省 物 流装备 信 息化 工程技 术 中心 兰 州 7 0 7 300
摘 要 :介绍巷道堆垛式 自动化立体 车库工作 模式 ,建立 了约束 条件下 的 车辆人库 、出库 、因车位 存满 而
sn t b f rt e smu ai n o e mo e wi p cfc p r mee s i g Ma l i l t ft d l t s e i aa t r ,wi lo t e a a y i r s l . T e r s l h w t a a o h o h h i t a s h n l ss e u t h s h e u t s o h t s
i o slng, me ni ha h a a e fa u e ih e e g o s mpto a ng t tt e g r g e t r s hg n r y c n u i n. K e w o ds: g r g y r a a e; r d m c e s;smu ai n;M alb an o a c s i l to t a
离去 的随机存 取策略车库工作模型 。以车辆 到达服从泊 松分 布 、库 内存 放 时间服从 正态 分布 的情况 建立 数学模 型 ,采用 M t b编制仿真程序 ,对 特定 参数的模型进行 了仿真 ,并 给 出分 析结 果 。结果 表 明在所设 定参 数下该 al a 车库 车位 利用 率较高 ,堆垛机运行距离较 长。 关键 词 :停车库 ;随机存取 ; 仿真 ;Ma a tb l
影 响的分 析 ,没 有 考 虑 到各 种 不 确 定 性 因素 。立
立体车库停车系统的仿真研究及应用
立体车库停车系统的仿真研究及应用近年来,随着城市化进程的加快,汽车密度日益增加,停车难成为广大城市居民日常生活中的烦恼。
为解决这一问题,提高城市停车资源的利用效率,立体车库停车系统应运而生。
立体车库停车系统在优化停车流程、提高停车利用率、节约空间等方面具有独特优势,在城市停车领域中应用广泛。
立体车库停车系统作为一种高科技停车设备,需要经过多次试验和模拟才能确保其稳定、安全和高效。
其中,仿真研究是立体车库停车系统研发和应用过程中必不可少的一环。
本文将从立体车库停车系统的概述、仿真研究的意义、仿真模型的建立、仿真实验的验证和应用案例分析等方面综合阐述立体车库停车系统的仿真研究及其应用价值。
一、立体车库停车系统的概述立体车库停车系统是一种采用机械或电动装置将车辆垂直移动并存储在立体式车库中的停车设备。
在一个车位面积较小的情况下,通过立体化、自动化的设计,可以比传统的地面停车场节省更多的空间。
这类停车设备在高密度城市地区,如商业中心、旅游景区、医院等地广泛应用,通过优化停车资源的利用,提高城市环境的质量和人居环境的舒适度。
二、仿真研究的意义立体车库停车系统的仿真研究可以大大减少实验成本和时间,概括出合理的动作和控制策略,最终实现直接在实际应用中解决问题的目标。
在立体车库停车系统的仿真研究中,可以通过建立精确的仿真模型,对停车系统进行复杂的动力学分析,在不同的进出口配置和交通流量下,实施不同的控制策略,比较不同的方案,从而找出最优的解决方案。
三、仿真模型的建立在立体车库停车系统仿真研究中,建立合理的仿真模型是至关重要的。
首先,需要建立3D模型和物理模型,其中3D模型可以直观地表现系统运作过程,物理模型可以模拟系统的物理特性,如力、速度、加速度等。
其次,需要在仿真软件中编写项目程序,包括控制器、传感器和执行器等。
同时,还需要考虑系统的物理参数、电信号传输特性和外部环境因素等,并在程序中进行模拟,确保仿真结果的可靠性和准确性。
车位分配问题 数学建模
停车场车位分配问题研究一. 摘要某写字楼的停车位数目一定,主要提供写字楼办公人员办卡包年或包月使用,为了使停车场空置率减少,以及免于有卡却没有车位产生冲突的尴尬,我们必须对停车流量进行模拟分析,建立合理的最佳的车位分配管理方法,并得到最大的收益。
首先对附表中数据进行分析,因为我们得到的是四月份的停车流量,为了方便分析研究,我们应该把数据转化为停车量。
我们从中引入了概率进行模拟。
假设停在停车场中的车辆在各个时间段离开是按照泊松分布,即可分别求的到来的和离开的车辆数目,就可以方便得得到停车量这个关键的数据。
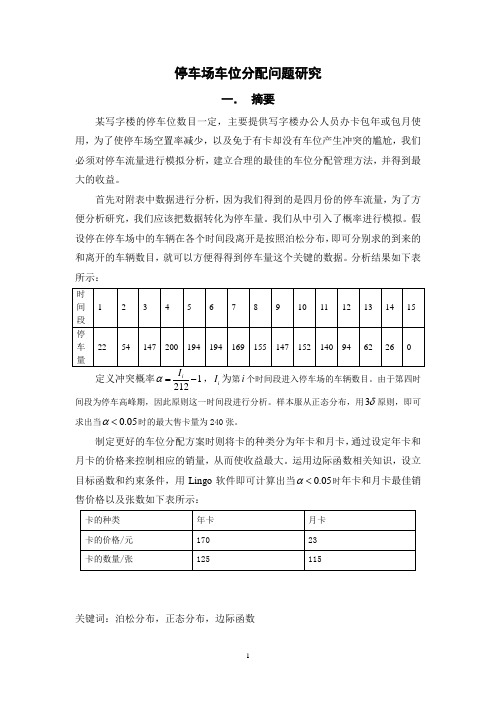
分析结果如下表所示:定义冲突概率1212iα=-,i I 为第i 个时间段进入停车场的车辆数目。
由于第四时间段为停车高峰期,因此原则这一时间段进行分析。
样本服从正态分布,用3δ原则,即可求出当0.05α<时的最大售卡量为240张。
制定更好的车位分配方案时则将卡的种类分为年卡和月卡,通过设定年卡和月卡的价格来控制相应的销量,从而使收益最大。
运用边际函数相关知识,设立目标函数和约束条件,用Lingo 软件即可计算出当0.05α<时年卡和月卡最佳销售价格以及张数如下表所示:关键词:泊松分布,正态分布,边际函数二.问题分析与重述问题一:题目要求模拟附表中停车流量,分析停车量的统计规律。
停车流量与停车量是两个不同的概念,要分析停车量的统计规律就必须弄清楚来到停车场的车辆数目以及离开停车场的车辆数目。
而题目所给的条件中我们只知道停车流量,也就是车离开与来到的总的次数,因此我们假设车的离开服从泊松分布,运用概率来求出单位时间内车辆离开的数目,这样也就可以知道单位时间内车辆到来的数目,它们两者的差值也就是我们所要求的停车量。
α=情形下,计算最大售卡量。
问题二:定义冲突概率,求若冲突概率低于0.05根据附表中停车流量数据,以及上题对停车量的分析,我们可以知道在第四个时间段,即早上9:00—10:00停车量是最多的,也就是在这段时间产生冲突的概率是最大的,为了计算最大售卡量,我们就取这段时间进行分析。
城市停车场资源优化配置仿真模拟分析
城市停车场资源优化配置仿真模拟分析城市停车问题一直是城市管理中的重要课题之一,合理配置停车场资源能够有效缓解城市停车难题。
本文通过仿真模拟分析的方法,探讨城市停车场资源优化配置的策略,以期为城市停车场管理提供参考。
1. 城市停车问题的现状随着城市化进程不断加快,小汽车保有量激增,城市停车难问题日益突出。
市区内的停车位严重不足,导致交通拥堵、停车乱象等问题频发,进一步加重了城市管理的难度。
因此,如何优化配置城市停车场资源,成为城市管理者亟需解决的问题。
2. 城市停车需求与资源的仿真模拟为了分析城市停车需求与资源之间的关系,我们可以利用仿真模拟的方法进行研究。
首先,我们可以收集城市内停车场的位置、容量、可用性等相关数据,建立一个停车资源数据库。
然后,在地理信息系统(GIS)的支持下,我们可以将城市车流量、人口密度等数据融入模型中,模拟城市停车需求的分布情况。
根据模拟结果,我们可以得出不同区域停车需求与资源匹配度的评估,进而制定优化策略。
3. 停车场资源优化配置的仿真实验为了更好地配置停车场资源,我们可以使用仿真实验来模拟不同优化策略的效果。
首先,我们可以选择一个实际城市进行案例研究,收集该城市的交通流量、停车需求、城市规划等相关数据。
然后,我们可以利用仿真软件设计不同的停车场分布方案,并模拟出在各种情况下停车位的利用率、交通拥堵情况等指标。
通过对比不同方案的结果,我们可以评估不同优化策略的效果,并选择最优方案进行实施。
4. 停车场资源智能调度系统的建立在实际管理中,为了更好地配置城市停车场资源,我们可以建立停车场资源智能调度系统。
该系统可以通过收集实时的车流量、停车需求等数据,利用人工智能算法对停车位进行动态调度。
例如,系统可以实时监测停车场的空余位数,并根据车流量预测进行合理的调度,以最大程度地利用停车位资源。
通过实时的数据分析和智能决策,该系统可以有效地提高停车位利用率,缓解城市停车难题。
5. 政府与社区的合作与倡导除了技术手段,政府与社区的合作与倡导也是城市停车资源优化配置的重要方面。
论文1—停车场车位分配问题1资料
停车场车位分配问题摘要本文基于SPSS软件模拟、正态总体、随机概率、线性规划等方法对停车场车位分配问题做了探讨。
根据已有的30 天停车流量数据,模拟近100天对应时间段的停车流量数据,分析其规律。
最终达到合理分配车位,使得停车收益达到最大。
对于问题(一)首先,根据附表中30天各时间段的车位流量数求对应空余泊位数时间段上的变化规律。
引入相似系数S,波动系数ξ。
得到了一些有用的结论与规律。
在件模此基础上基于SPSS软拟附表中的停车流量,利用正态总体、随机概率等方法分析停车量的统计规律。
对于问题(二)根据附表中停车流量数据,以及对停车量的分析,得知在第四个时段早上9:00—10:00停车量最多,表明该段时间产生冲突的概率是最大的。
取该段时间停车流量进行分析,将四月份的数据进行整理,绘制高峰期停车量与次数的柱状图,近似服从正态分布,求均值后再用3 原则,进而求出最多可以停车的数量,最后求出最大售卡量为233张。
对于问题(三)建立数学线性规划模型解决该问题,对停车位分配问题进行分析,提出将停车位分类定价,即将停车流量分为包年或者包月停车流量和临时停车流量两类。
采用车位分类控制超售的策略。
建立目标函数以及约束条件。
来改善停车场的收益.关键字:空余泊位数停车位分配正态总体泊松分布 SPSS软件模拟数学规划超售策略一.问题的重述某写字楼拥有212 个车位,主要供写字楼工作人员办卡包年或包月使用,车位不固定,只要有空闲车位就可以停。
现在的情况是,办卡客户虽然办了卡,但不一定都来停车,且很多车子是流动的,可能早上停进来,中午就走了。
这样,停车场空置率很大,造成了资源浪费,现计划扩大售卡数量和对象。
假定总车位固定不变,请依据附表1 中4 月份每天各时段的停车流量数据,建立数学模型回答下列问题:(1)模拟附表中停车流量,分析停车量统计规律;(2)定义冲突概率α,求若冲突概率低于α= 0.05情形下,计算最大售卡量;(3)如果你是车位管理员,你如何设计最佳车位分配管理方法,使得收益最大。
车位分配问题数学建模

停车场车位分配问题研究一. 摘要某写字楼的停车位数目一定,主要提供写字楼办公人员办卡包年或包月使用,为了使停车场空置率减少,以及免于有卡却没有车位产生冲突的尴尬,我们必须对停车流量进行模拟分析,建立合理的最佳的车位分配管理方法,并得到最大的收益。
首先对附表中数据进行分析,因为我们得到的是四月份的停车流量,为了方便分析研究,我们应该把数据转化为停车量。
我们从中引入了概率进行模拟。
假设停在停车场中的车辆在各个时间段离开是按照泊松分布,即可分别求的到来的和离开的车辆数目,就可以方便得得到停车量这个关键的数据。
分析结果如下表所示:定义冲突概率1212iα=-,i I 为第i 个时间段进入停车场的车辆数目。
由于第四时间段为停车高峰期,因此原则这一时间段进行分析。
样本服从正态分布,用3δ原则,即可求出当0.05α<时的最大售卡量为240张。
制定更好的车位分配方案时则将卡的种类分为年卡和月卡,通过设定年卡和月卡的价格来控制相应的销量,从而使收益最大。
运用边际函数相关知识,设立目标函数和约束条件,用Lingo 软件即可计算出当0.05α<时年卡和月卡最佳销售价格以及张数如下表所示:关键词:泊松分布,正态分布,边际函数二.问题分析与重述问题一:题目要求模拟附表中停车流量,分析停车量的统计规律。
停车流量与停车量是两个不同的概念,要分析停车量的统计规律就必须弄清楚来到停车场的车辆数目以及离开停车场的车辆数目。
而题目所给的条件中我们只知道停车流量,也就是车离开与来到的总的次数,因此我们假设车的离开服从泊松分布,运用概率来求出单位时间内车辆离开的数目,这样也就可以知道单位时间内车辆到来的数目,它们两者的差值也就是我们所要求的停车量。
α=情形下,计算最大售卡问题二:定义冲突概率,求若冲突概率低于0.05量。
根据附表中停车流量数据,以及上题对停车量的分析,我们可以知道在第四个时间段,即早上9:00—10:00停车量是最多的,也就是在这段时间产生冲突的概率是最大的,为了计算最大售卡量,我们就取这段时间进行分析。
自动化立体车库排队模型及调度优化研究
自动化立体车库排队模型及调度优化研究一、引言随着城市人口的增长和车辆数量的激增,车辆停放问题成为城市交通中的一个瓶颈。
传统的车库停车方式往往存在着车位有限、停车效率低下等问题。
因此,研究车库的自动化立体停车模型及调度优化具有重要的现实意义。
二、自动化立体车库排队模型自动化立体车库是一种集机械、电子和计算机技术于一体的停车设施。
在自动化立体车库中,车辆通常采用垂直升降的方式进行停车。
根据车库的规模和设计特点,车库内部可以分为多层,并且每一层都有多个停车位。
为了保证车辆能够顺利进出车库,需要建立排队模型。
在排队模型中,车辆从进入车库开始,按照一定的规则排队等待停车位。
可以将车库中的每一个位置看作一个服务台,而车辆则是顾客。
车辆进入车库后,根据当前停车位的情况选择一个最优的停车位置,然后按照先来先服务的原则排队等待停车。
当有停车位空闲时,车辆被允许进入停车位停放。
在车辆离开停车位后,下一辆车可以进入停车位。
三、调度优化为了优化自动化立体车库的调度,提高停车效率,可以采用以下几种方法。
1.停车位分配策略:根据车库内停车位的分布情况,采用合理的停车位分配策略,将车辆分配到最近的空闲停车位,从而减少等待时间。
2.车辆选择策略:在车库入口处设置车辆选择系统,通过车辆的属性和停车目的地等信息,选择最优的停车位置,避免长时间等待。
3.出入口管理:合理规划车库的出入口,设置交通信号灯和红绿灯等控制设施,以保证车库中车辆的正常出入。
4.调度算法优化:通过建立合理的调度算法,对车辆进出车库的顺序进行优化,避免拥堵和混乱,提高停车效率。
四、总结自动化立体车库排队模型及调度优化是解决城市停车难题的重要手段之一、通过建立合理的排队模型和采用相应的调度策略,可以有效提高停车效率,减少等待时间,优化城市交通资源的利用。
未来,随着智能交通技术的发展,自动化立体车库的调度优化将在实际应用中发挥更大的作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关键词: 停车库; 就近存取; 随机存取; 仿真; Matlab 中图分类号: U491.7 文献标识码: A
Abstract: Based on analysis work mode of laneway stowed parking system, the handy access modal and random access modal of laneway stowed parking system are established which include car be put in storage, send out of storage and also leave storage because of none free park existed. The numerical modal built through car arrival submits to possion stream and storing time submits to normal distribution. Simulation procedure programmed by matlab. Using certain parameter the numerical modal simulates parking system's work procedure. At last the analysis of simulation is described. The result showed that this parking system had high park using ratio. The result also proved handy access modal had shorter running distance and lower energy consumption than random access modal. Key words: parking system; handy access; random access; simulation; Matlab
Ca i : 第 i 个 车 辆到 达 时 刻; Cl i : 第 i 个 车 辆 离 去 时 刻 ; Ta j : 第 j 个 任 务 执 行 时 刻 ; Lost: 因 为 没 有 可 用 车 位 而 离
去 的车 辆 数 ; St j : 第 j 个 任 务 堆垛 机 运 行所 经 过 的车 位 列 数 ; P i : 第 i 个 车 辆 分 配 车 位 所 在 的 列 数 ; T: 总 模 拟 时 间 , 以
国内学者对立体车库研究众多, 其中文献[1]对立体仓库中堆垛机待命位进行了分析, 给出了 堆 垛 机理 想 待 命位 的 动 态控 制 算法。 文献[2]以随机存储策略的库区和货位分配以及堆垛机行驶时间为优化控制目标, 用遗传算 法求 出 动 态货 位 分 配和 拣 选 路 径优化的 Pareto 最优解。 文献[3]建立了就近存取策略下堆垛机使用率的数学模型从而判 断 能 否满 足 立 体仓 库 的 吞吐 要 求 。 文献 [4]通过 对 立体 车 库 的车 流 量 、 库存 容 量 、 作业 效 率 及堆 垛 机 数量 等 特 征的 分 析 , 给出 了 对 立体 车 库 性能 进 行 评价 的 多 种 指 标 。 文献[5]利用粗糙集理论建立模型, 考虑到高峰时段停车数量、 步行距离、 土地价格等客观因素影 响 建立 了 立 体停 车 库 选址 决 策 模型。 文献[6]以排队论为理论依据通过对立体车库堆垛机作业时间和用户存取车排队系统概率特性研 究 给 出了 对 立 体车 库 堆 垛 机作业效率进行评价的多种指标。
Logistics Sci-Tech No.10, 2010
誗基金项目誗 文章编号: 1002-3100 (2010) 10随机车位分配与就近车位分配仿真及分析
Simulation and Analysis on Laneway Stowed Parking System Random Access and Handy Access sssssssssssssssssssssssssssssssssssssssssssssss
本文旨在对巷道堆垛式立体车库在采用随机存取策略和就近存取策略分别建模, 并模拟运行时动态情况, 对车辆到达、 库 内停放时间、 车位使用效率等情况进行仿真分析, 采用同样参数对采用不同存取策略时运行情况给出数值分析, 从而在车库设 计前期和投入实际运行后为管理者决策分析提供支持。 1 模型建立 1.1 仿真模型建立原则
立体车库随机车位分配与就近车位分配仿真及分析
图 2 随机存取仿真结果
图 3 就近存取仿真结果
但采用不同存取策略在运行截止时堆垛机运行所经过的列数是不同的。 由 2 式得到采用随机存取时堆垛机在仿真运行截止
时共运行 557 列。 把数据带入 3 式有: 采用随机存取策略堆垛机平均每任务运行列数:
k+m
Logistics Sci-Tech 2010.10 13
立体车库随机车位分配与就近车位分配仿真及分析
(1) 临时车辆的到达时间间隔服从泊松分布。
(2) 临时车辆在库内存放时间服从正态分布。
(3) 采用就近存取策略时临时车辆车位的分配在当前可用车位中就近分配。
(4) 采用随机存取策略时临时车辆车位的分配在当前可用车位中随机分配。
ΣSt Σ j Σ
Du= j = 1
=8.70
k+m
由 2 式得到采用就近存取时堆垛机在仿真运行截止时共运行 483 列。 把数据带入 3 式有 : 采 用 就近 存 取 策略 堆 垛 机平 均 每
任务运行列数:
k+m
ΣSt Σ j Σ
Du= j = 1
=7.55
k+m
采用就近存取策略在本次仿真结果中堆垛机比采用随机存取策略少运行 74 列, 平均每任务少运行 1.15 列。
根据上述仿真结果, 该 车 库 在到 达 车 辆服 从 λ=15, μ=90, α=30 的 情况 下 , 车 库车 位 的 利用 率 较 高, 平 均 每 天每 个 车 位利
将程 序 运行 300 次 模 拟全 年 运 行, 某 次 仿 真结 果 为 : 有 9 311 车 次 停 放, 7 596 车 次 出 库 , 321 车 次 由 于 车 位 已 满 而 离 去 ,
采用随机分配策略堆垛机共运行 159 921 列, 采用就近分配策略堆垛机共运行 124 184 列。
随着控制技术的不断更新, 立体车库越来越向智能化、 规模化的方向发展, 立体车库成为解决停车难问题的重要手段。 其 中, 巷道堆垛式立体车库成为立体车库发展主流。 作为车库的管理者在关心车库运行效率和运行能耗的同时对车库的运行盈利 能力也同样重视。 立体停车库在分配固定车位用户后, 究竟可以保留多少车位可用于临时车辆停放, 保留的临时车位数量可否 满足车库外界环境对车位的要求? 临时车辆存取采用就近分配车位方式还是随机分配方式对车库整体运行效率有何影响, 都是 目前实际运行车库亟待解决的问题。
Du = j = 1
( 3)
k+m
上述车位利用率反映了车库中可用车位中每个车位平均停放车辆的次数, 间接反映了车库的盈利能力, 堆垛机平均每任务
运行列数反映了为完成出入库任务堆垛机的运行情况, 间接反映了能耗问题。
运用下次事件 时 间推 进 法 思想 , 采 用 Matlab 编制 程序。 程序软件流程图如图 1。 2 仿真数据分析
李建国 1,2, 蒋兆远 2 LI Jian-guo1,2, JIANG Zhao-yuan2
(1. 兰州交通大学 机电技术研究所, 甘肃 兰州 730070; 2. 甘肃省物流装备信息化工程技术中心, 甘肃 兰州 730070) (1. Mechatronics T&R Institute, Lanzhou Jiaotong University, Lanzhou 730070, China; 2. Engineering Technology Center for Informatization of Logistics and Transport Equipment, Lanzhou 730070, China)
≥
i-1
+P i
i≥2 P i 为入库 P i-1 为入库
St j
=
P ≥≥ i
≥
≥ ≥≥ ≥
P 2P
i-1 i
-P i
+P i
i≥2 P i 为入库 P i-1 为入库 i≥2 P i 为出库 P i-1 为入库 i≥2 P i 为出库 P i-1 为出库
( 2)
堆垛机平均每任务运行列数:
k+m
ΣSt j
分钟为单位; P: 可用于存放临时车辆的空闲车位数 ; μ: 车辆在库内存放时间的期望; σ: 车辆在库内存放时间的偏差; λ:
车辆到达的时间间隔; k: 仿真时间内入库任务总数; m: 仿真时间内出库任务总数。
定义:
车位利用率:
k
ΣCa i
Pu = i = 1
( 1)
P
堆垛机每任务运行列数:
P ≥
初始化参数 λ,μ,α,T,P i,j 增加, i=i+1, j=j+1
以某小区立体停车库运行为例, 取参数为: λ =15, μ=90, α=30, 可 用 于 临 时 停 放 的 车 位 数 为 10, 取一个工作日为 8 小时, 即仿真终止时间为 480。