第七讲 图像形态学处理
合集下载
第7章 形态学图像处理(08) 数字图像处理课件
第七章 形态学图像处理
S+x3 x
S+x1
S+x2
图7-6 S+x的三种可能的状态
第七章 形态学图像处理 第一种情形说明S+x与X相关最大,因而满足式(7-1)的点x的
全体构成结构元素与图像最大相关点集,这个点集称为S对X的 腐蚀(简称腐蚀,有时也称X用S腐蚀),记为X S。
腐蚀定义
XS {x | S x X}
即取出A中的每个点a的坐标值,将其与点b的坐标值相加,得到 一个新的点的坐标值a+b,所有这些新点所构成的图像就是A被 b平移的结果,记为A+b,或(A)b如图7-4(a-c)所示。 反射:A关于图像原点的反射结果为
Av={- a∣a∈A}
即将A中的每个点取相反数后所得的:如果两个物体之间有细小的连通,那 么当结构元素足够大时, 通过腐蚀可以将两个物体分开。
第七章 形态学图像处理
7.2.2 膨胀(Dilation)——最基本的一种运算
腐蚀可以看作是将图像X中每一与结构元素S全等的子集S+x 收缩为点x。反之,也可以将X中的每一个点x扩大为S+x,这就
结构元素的原点:实际上结构元素本身也是一个图像集合。对 每个结构元素可以指定一个原点,它是结构元素参与形态学运 算的参考点。应注意,原点可以包含在结构元素中,也可以不 包含在结构元素中,但运算的结果常不相同。
以下用阴影代表值为1的区域,白色代表值为0的区域,运 算是对值为1的区域进行的。二值形态学中两个最基本的运算— —腐蚀与膨胀。
第七章 形态学图像处理
b a
A (a)
B
A
(b)
图7-1 元素与集合间的关系 (a) a∈A, b∈A, (b)B A, B是A的子集
形态学图像处理

A B ( AB1 ) [ AcB2 ]
2024/5/8
25
Hit/Miss——形状检测的基本工具
• 在不同尺寸的图形中检测出想要的形状 • 严格的模版匹配。指出被匹配点所应满足的性质(模板形
状)的同时也指出这些点所不应满足的性质,即对周围环 境背景的要求。
形态学的主要应用
• 处理图像的类型:二值图像
边界提取举例
2024/5/8
29
边界提取 Boundary Extraction
区域填充 Region Filling
X k ( X k 1 B) Ac
k 1,2,3,
连通分量提取 Extraction of connected components
连通分量举例
2024/5/8
33
• 补集。A的补集记为
Ac {w | w A}
• 差集:记为A-B,定义为:
A B {w | w A, w B} A Bc
集合的基本运算
集合的基本运算
二值图像的逻辑运算
二值图像的逻辑运算
结构元素
• 形态学图像处理表现为一种邻域运算形式;
• 一种特殊定义的邻域称之为“结构元素” (Structure Element),在每个像素位置上它与 二值图像对应的区域进行特定的逻辑运算,逻辑运 算的结果为输出图像的相应像素。
细化 Thinning
• Your subtopic goes here
A B A ( A B) A ( A B)c
{B} {B1, B2, B3,, Bn} A B ((((A B1 ) B2 )) Bn )
细化 Thinning
• Your subtopic goes here
2024/5/8
25
Hit/Miss——形状检测的基本工具
• 在不同尺寸的图形中检测出想要的形状 • 严格的模版匹配。指出被匹配点所应满足的性质(模板形
状)的同时也指出这些点所不应满足的性质,即对周围环 境背景的要求。
形态学的主要应用
• 处理图像的类型:二值图像
边界提取举例
2024/5/8
29
边界提取 Boundary Extraction
区域填充 Region Filling
X k ( X k 1 B) Ac
k 1,2,3,
连通分量提取 Extraction of connected components
连通分量举例
2024/5/8
33
• 补集。A的补集记为
Ac {w | w A}
• 差集:记为A-B,定义为:
A B {w | w A, w B} A Bc
集合的基本运算
集合的基本运算
二值图像的逻辑运算
二值图像的逻辑运算
结构元素
• 形态学图像处理表现为一种邻域运算形式;
• 一种特殊定义的邻域称之为“结构元素” (Structure Element),在每个像素位置上它与 二值图像对应的区域进行特定的逻辑运算,逻辑运 算的结果为输出图像的相应像素。
细化 Thinning
• Your subtopic goes here
A B A ( A B) A ( A B)c
{B} {B1, B2, B3,, Bn} A B ((((A B1 ) B2 )) Bn )
细化 Thinning
• Your subtopic goes here
图像分析与处理数学形态学PPT课件
第21页/共48页
开 • 先腐蚀后膨胀称为开(open),即OPEN(X)=D(E(X))。
第22页/共48页
开 • 上面的两幅图中,左边是被处理的图象X(二值图象,针对的是黑点),右
边是结构元素B。 • 下面的两幅图中左边是腐蚀后的结果,右边是在此基础上膨胀的结果。 • 可以看到,原图经过开运算后,一些孤立的小点被去掉了。 • 一般来说,开运算能够去除孤立的小点,毛刺和小桥(即连通两块区域的
• 如果B不是对称的, X被B腐蚀的结果和 X被 Bv腐蚀的结果 不同。
第9页/共48页
腐蚀
第10页/共48页
腐蚀
• 左边是被处理的图象X(二值图象,针对的是黑点)。 • 中间是结构元素B,标有origin的点是中心点,即当前
处理元素的位置。 • 腐蚀的方法是:
• 拿B的中心点和X上的点一个一个地对比; • 如果B上的所有点都在X的范围内,则该点保留,否则将该点
第17页/共48页
膨胀
原图
膨胀后的 结果图
第18页/共48页
膨胀
• 腐蚀运算和膨胀运算互为对偶的,用公式表示 为
• 即X 被B腐蚀后的补集等于X的补集被B膨胀。
• 可以形象的理解为:
• 河岸的补集为河面,河岸的腐蚀等价于河面的膨胀。
• 对偶关系是非常有用的。
第19页/共48页
第20页/共48页
第34页/共48页
• 区域骨架问题:计算量大 算法改进思想
• 在保证产生正确的骨架的同时,改进算法的 效率。比较典型的是一类细化算法,它们不 断删去边缘,但保证删除满足:
1)不移去端点;2)不破坏连通性;(3)不 引起区域的过度腐蚀。
p
第35页/共48页
7-图像分割-形态学图像处理

集合的平移图示
8.2 二值形态学的基本运算
8.2.1 腐蚀
1、概念
设A为目标图像,B为结构元素,则目标图像A被
结构元素B腐蚀可定义为:
AB x | ( B) y A
(8.9)
其中,y是一个表示集合平移的位移量。
8.2.1 腐蚀
腐蚀运算的含义是:每当在目标图像A中找到一个
与结构元素B相同的子图像时,就把该子图像中与B的 原点位置对应的那个像素位置标注为1,图像A上标注
A B {x | x A且x B}
(8.3)
集合的交
2.3.1 简单的图像成像模型
2、集合的基本运算等 (3) 集合的补
A {x | x A}
c
(8.4)
集合的补
2.3.1 简单的图像成像模型
2、集合的基本运算等 (4) 集合的差
A B {x | x A且x B}
70年代
1973年,Mathron的《随机集和积分几何》为数学 形态学奠定了基础。 1982 由Serra主编完成的《Image Analysis and Mathematical Morphology》是里程碑,表明数学形 态学在理论上已趋于完备。 此后,该书的第二版和第三版相继出版。1986, CVGIP(computer vision graphics and image processing) 发表了MM专辑,使MM的研究呈现新景 象。 提出基于MM的纹理分析模型系列。
卷积模板,每当结构元素平移到其原点位置与目标图 像A中那些像素值为“1”的位置重合时,就判断被结构
元素覆盖的子图像的其它像素的值是否都与结构元素 相应位置的像素值相同;只有当其都相同时,就将结 果图像中的那个与原点位置对应的像素位置的值置为 “1”,否则置为0。 注意:当结构元素在目标图像上平移时,结构元素中 的任何元素不能超出目标图像的范围。
图像形态学处理的概念
cvDilate(src,dst,element,1); } cvReleaseStructuringElement(&element); cvShowImage("Erode/Dilate",dst); }
int main(int argc,char **argv) { char *filename =argc ==2?argv[1]:(char *)"lena.jpg"; if( (src = cvLoadImage(filename,1)) == 0 ) return -1; dst=cvCloneImage(src); cvNamedWindow("Open/Close",1); cvNamedWindow("Erode/Dilate",1); open_close_pos = erode_dilate_pos = max_iters;
检测完整幅图像后一次性去除要细化的点。 常用的图像细化算法有 hilditch 算法,pavlidis 算法和 rosenfeld 算法等。 注:进行细化算法前要先对图像进行二值化,即图像中只包含“黑”和“白”两 种颜色。 二、OpenCv 形态学操作相关函数 1、MorphologyEx 高级形态学变换
void cvDilate( const CvArr* src, CvArr* dst, IplConvKernel* element=NULL, int iterations=1 ); src 输入图像. dst 输出图像. element 用于膨胀的结构元素。若为 NULL, 则使用 3×3 长方形的结构元素 iterations 膨胀的次数 函数 cvDilate 对输入图像使用指定的结构元进行膨胀, 该结构决定每个具有最 小值象素点的邻域形状: dst=dilate(src,element): dst(x,y)=max((x',y') in element))src(x+x',y+y') 函数支持 (in-place) 模式。 膨胀可以重复进行 (iterations) 次. 对彩色图像, 每个彩色通道单独处理。 3、Erode 使用任意结构元素腐蚀图像
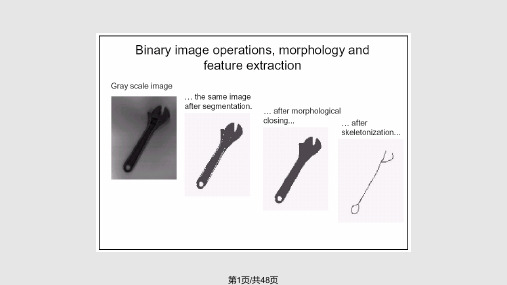
数字图像处理与分析-7形态学图像处理

图9.10进一步对开操作和闭操作进行了说明。 图9.10(a)显示了集合A, 图9.10(b)显示了在腐蚀过程中的一块原盘形结构元素的 各种位置。 图9.10(c)显示了腐蚀的结果。 图9.10(d)显示了对腐蚀后的集合进行膨胀的操作。 图9.10(e)显示了开操作最后的结果。 同样,图9.10(f)显示了使用同样的结构元素对A进行闭 操作的结果。 在使用圆形结构元素对A进行开操作和闭操作后,所得对 象的各个部分得到了平滑处理。
形态学图像平滑处理
先开操作,再闭操作:消除/减 弱人为的亮和暗的细节
形态学图像梯度 定义: g = ( f ⊕ b ) − ( f ?? b )
图示:
Top-hat变换—可增强阴影细节 定义: h = f − ( f b ) 图示:
纹理分割 图示:
粒度测定 图示:
闭操作:
f • b = ( f ⊕ b )?? b
开操作和闭操作的对偶性:
( f • b )c =
ˆ fc b
图示:
例题:7.10 灰度级的开操作 和闭操作的说明
图9.31(a)显示了使用与图9.29(a)中相同的结构元素 对图像9.29(a)进行开操作的结果。(b)显示了进行闭 操作的结果。
7.6.4 灰度级形态学的一些应 用
7.5.6 粗化
粗化定义:
A ?? B = A ∪ ( A ?? B )
或:
A ??{B} = … A ?? B1 ?? B 2 … ?? B n
(( ((
)
) )
)
图示:
7.5.7 骨架
求骨架S(A)的表达式:
S
(A ) = ∪
K
S
k
(A )
k =0
S k ( A) = ( A ?? kB ) − ( A ?? kB ) B
形态学图像平滑处理
先开操作,再闭操作:消除/减 弱人为的亮和暗的细节
形态学图像梯度 定义: g = ( f ⊕ b ) − ( f ?? b )
图示:
Top-hat变换—可增强阴影细节 定义: h = f − ( f b ) 图示:
纹理分割 图示:
粒度测定 图示:
闭操作:
f • b = ( f ⊕ b )?? b
开操作和闭操作的对偶性:
( f • b )c =
ˆ fc b
图示:
例题:7.10 灰度级的开操作 和闭操作的说明
图9.31(a)显示了使用与图9.29(a)中相同的结构元素 对图像9.29(a)进行开操作的结果。(b)显示了进行闭 操作的结果。
7.6.4 灰度级形态学的一些应 用
7.5.6 粗化
粗化定义:
A ?? B = A ∪ ( A ?? B )
或:
A ??{B} = … A ?? B1 ?? B 2 … ?? B n
(( ((
)
) )
)
图示:
7.5.7 骨架
求骨架S(A)的表达式:
S
(A ) = ∪
K
S
k
(A )
k =0
S k ( A) = ( A ?? kB ) − ( A ?? kB ) B
第七讲 二值图像处理与形状分析重点
二值图像的连接性和距离
像素的连接
对于二值图像中具有相同值的两个像素A和B,所有和A、B 具有相同值的像素系列p0(=A),p1,p2,…,pn-1,pn(=B)存在,并 且pi-1和pi互为4-/8-邻接,那么像素A和B叫做4-/8-连接,以 上的像素序列叫4-/8-路径。如图8.1.3。
二值图像的连接性和距离
8.2 二值图像连接成分的变形 操作
二值图像连接成分的变形操作
1、连接成分的标记
为区分二值图像中的连接成分,求得连接成分个数,对属于 同一个1像素连接成分的所有像素分配相同的编号,对不同 的连接成分分配不同的编号的操作,叫做连接成分的标记。
对图像进行TV光栅扫描,发现没有分配标号的1像素,对这个像素分 配还没有使用的标号,对位于这个像素8-邻域内的1像素也赋予同一 标号,然后对位于其8-邻域内的1像素也赋予同一标号。
1 0 B 1 1
二值图像连接成分的变形操作
2.4、开运算
先腐蚀后膨胀的运算称为开运算。它一般的作用是消除细小物体。 在纤点处分离物体和平滑物体边界时又不明显改变其面积
A B (A
B) B
2.5、闭运算
先膨胀后腐蚀的运算称为闭运算。它一般的作用是填充物体内细小 空洞,连接相邻物体,在不明显改变其面积的情况下平滑物体
膨胀运算的一个例子
0 0 A 0 0 0 1 1 0 0 0 0 1 0 0 1 0 1 0 1 0 0 0 1 1 0 0 0 0 0 0
1 0 B 1 1
二值图像连接成分的变形操作
2.3、收缩/腐蚀
腐蚀的运算符为⊙,A用B来腐蚀记作A⊙B
形态学图像处理

工业检测
在工业生产中,形态学图像处 理可用于表面缺陷检测、零件 分类和识别等方面,提高生产 效率和产品质量。
计算机视觉
在计算机视觉领域,形态学图 像处理可用于目标跟踪、人脸 识别、手势识别等任务,提高 视觉系统的准确性和稳定性。
形态学图像处理的基本原理
01
结构元素
形态学图像处理的基本操作单元是结构元素,它可以是任意形状和大小
医学影像分析中的形态学图像处理
总结词
形态学图像处理在医学影像分析中具有重要 作用,能够提高医学影像的解读精度和辅助 诊断的准确性。
详细描述
形态学图像处理技术能够处理和分析医学影 像,如X光片、CT和MRI等。通过去除噪声、 增强对比度、分割病灶区域等操作,形态学 图像处理能够帮助医生更准确地解读医学影 像,提高诊断的准确性和可靠性。同时,形 态学图像处理还可以用于辅助手术导航和放 射治疗计划制定等领域。
详细描述
边界提取通过识别图像中像素的边缘,提取出物体的边界。区域填充则是将图像中某个特定区域内的 像素标记为同一值,常用于填充孔洞或填补缺失部分。这些操作在图像分割、特征提取和对象识别等 领域具有重要应用价值。
03
形态学图像处理的实践应用
噪声去除
噪声去除
形态学图像处理中的噪声去除技术,通过膨胀和腐 蚀等操作,能够有效地去除图像中的噪声点,提高 图像的清晰度和质量。
和算法,方便用户进行各种图像处理任务。
02
形态学图像处理的算法与技术
腐蚀算法
总结词
腐蚀算法是一种基本的形态学操作,用于消除图像中的小对象、在纤细点分离 对象或者收缩对象的边界。
详细描述
腐蚀算法通过将像素与其邻域进行比较,将小于邻域的像素去除,从而实现图 像的收缩。它通常用于消除噪声、断开连接的对象或减小图像中的区域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3、若物体之间有细小的连通,选择适当的结构元,
可以将物体分开。 4、不同的结构元及其不同的原点,产生不同的结果
3、膨胀的运算
a、基于膨胀定义本身的运算
+ +
保留的点
图像 A
结构元 B 原点位于结构元素中的膨胀操作
增加的点
删除的点 ? 保留的点
+
图像 A
结构元 B 原点不在结构元素中的膨胀操作
+
增加的点
0
间断连接 目标加粗
例二、腐蚀的应用(二值图像中的应用)
图像内部边长为1、3、5、 结构元素进行一次腐蚀 7、9和15像素的正方形图像
结构元素进行一次膨胀
结构元素为13x13,主要目的“滤除掉小于13个像素的小目标。
五、开操作与闭操作
1、定义 开操作为:
A B (A
-
B) B
即:使用结构元素 B 对集合 A 的开操作是用 B 对 A
{(1 , 1), (1 , 2), (2 , 1), (2 , 2), (2 , 3), (2 , 4), (3 , 1), (3 , 2), (3 , 3), (3 , 4), (4 , 2), (4 , 3), (5 , 2) }
c、基于位移运算的膨胀操作
+
保留的点
增加的点
图像 A
结构元 B
结构元为:
i 1
i
i 1,2,3,4 k 1, 2 , 3 ,
不考 虑点
x x x x x
B
1
B
2
B3
x x x x x
原点
x x x x x
x x x x x
B4
寻找几何凸壳的过程:
1 X0 A
X
1 4
X
2 2
X 83
X
4 2
凸壳
凸壳显示每个 设定水平和垂直尺寸 结构元素的属性 大小使得凸壳尺寸最小
解释:A 被 B 膨胀是所有位移 x 的集合, B 的映射与A至少
有一个元素是重叠的。换言之,用 B 膨胀 A 得到的集合是B 的映射的位移与 A 至少有一个非零元素相交时 B 的原点 x 位置的集合。从而上式变为:
ˆ ) A] A} A B {x | [(B x
膨胀的另外定义为:
A B {x | x a b, a A, b B} A B ( A) b
或3个像素宽度的边界。
例五、形态学提取边界
简单的二值图象
单像素宽度边界
结构元为3x3
2、区域填充 区域用1填充(非边界点为0)
X k ( X k 1 B) Ac
k 1, 2 , 3 ,
X 0 :初始点 X k X k 1 :迭代终止
原点
B A
A
c
填充结果
例六、区域填充 初始点
二值图象
选定区域填充后的图象
填充所有区域后的图象
3、连通分量的提取 连通分量 Y
X k ( X k 1 B) A
Y Xk
k 1, 2 , 3 ,
X 0 :初始点 X k X k 1 :迭代终止
起点
结构元
A
第一次迭代的结果
最终的结果
例七、使用连通分量检测包装食物中的异物
•
Y
Z
• • X
W
•
WX
A X Y Z
Ac
•
A - X
•
Ac - (W X )
•
( A - X ) ( Ac - (W X ))
七、形态学的主要应用
1、边界提取
( A) A ( A
A
-
B)
原点
B
A -B
( A)
3x3结构元素获得单像素宽度边界,5x5结构元获得2
b、基于向量运算的膨胀操作 设图像左上角的坐标为(0,0),则:A ={(1,1), (2,1), (2,2), (2,3), (3,2), (3,3), (4,3)},B={(0,0),
(1,0), (0,1)}
A B {(1 , 1), (2 , 1), (2 , 2), (2 , 3), (3 , 2), (3 , 3), (4 , 3), (2 , 1), (3 , 1), (3 , 2), (3 , 3), (4 , 2), (4 , 3), (5 , 3), (1 , 2), (2 , 2), (2 , 3), (2 , 4), (3 , 3), (3 , 4), (4 , 4), }
由开闭的性质有:同一结构元对于同一幅图像的多次开 闭操作等同于对图像的一次开闭操作
4、开操作与闭操作
Α - Β
· 结构元
开操作:使对象轮廓变 得光滑,断开狭窄的间 断和消除细的突出物 闭操作:使对象轮廓变得
ΑΒ
ΑΒ
更为光滑,消除狭窄的间
断和长细的鸿沟,消除小 的孔洞并填补轮廓线中的
ΑΒ
断裂。
+ +
图像 A
结构元 B B的映射 A的移位并求交 原点不在结构元同的点
A
-
B
5、膨胀与腐蚀的对偶性
A
B A B
C C
3x3结构元 求补
腐蚀
求补
膨胀
6、膨胀与腐蚀的不足 改变了原目标物的大小
例一、膨胀的应用(二值图像中的应用)
0 1
1 1 1
0 1 0
间断间隔 2个像素
代数和数论等),理论基础艰深,但基本观念比较简单。 理论基础和所用语言为:集合论。 图像中的集合:代表二值图像或者灰度(彩色)图像的
形状。如:黑白图像中的黑像素集合是图像的完全描述,
感兴趣目标区域的像素集合。
数学形态学图像处理的基本思想:使用具有一定形态 的结构元素,去度量和提取图像中的对应形状,如边界、 骨架、凸壳等,以达到对图像进行分析和识别的目的。 数学形态学图像处理意义:可以简化图像数据,保持
它们基本的形状特性,并除去不相干的结构。 数学形态学的基本运算:膨胀、腐蚀、开启和闭合,击中
击不中变换。
二、基本概念 形态学:从图像出发,研究物体目标的结构和拓扑关系 结构元素:任意大小,包含任意0、1组合的一个区域。
结构元素中的任意一点都可以成为结构元的原点。
形态学图像处理:结构元素与图像进行逻辑运算产生新 的图像的处理方法。 结构元与图像的运算:类似卷积,但用逻辑运算代替乘 加运算,结果为处理后图像的像素值。 形态学处理效果:取决于结构元素的大小、形状与逻辑 运算的方法。
第 七 讲 图像形态学处理
西安电子科技大学机电工程学院
王
义
敏
一、数学形态学图像处理 形态学:生物学的分支,研究动植物的形态和结构 数学形态学:分析几何形状和结构的数学方法,建立在 集合代数的基础上,用集合论方法定量描述集合结构的学 科。1985年以后成为分析图像几何特征的工具。
数学形态学是一门交叉学科,有严格的数学理论(集合
A
*
B (A
* *
-
X ) [ A
-
c
c
(W X )]
-
A
B (A
B1 ) [ A
A
B (A
B1 ) [ Ac
B2 ] ˆ ] B
2
B1是由与一个对象相联系的 B 元素构成的集合,B2 是与 相应背景有关的 B元素的集合,相应有B1 =X , B2 =W X
例四、形状检测
噪声斑点消除 指纹纹络间断
例四、引述电路板
a d
b e
c f
(a)原始灰度图像;(b)二值化后的图像;(c)用开运算清除噪 声;(d)用腐蚀和膨胀抽取各结点;(e)抽取骨架分离各线路;(f) 线路、结点和端点的最终显示
六、击中或击不中变换
1、作用:形状检测(图像中的对象是彼此不相连的) 2、表达式(有三种)为:
3、填补分割后物体中的空洞
2、腐蚀(使图像缩小)
A B {x | ( B) x A}
解释:A 被 B 腐蚀是所有位移 x 的集合, 其中 B 平移 x 后 仍包含于 A 中。换言之,用 B 腐蚀 A 得到的集合是B 完全 包含在 A 中时 B 的原点位置的集合。 腐蚀的另外定义为:
A
B {x | x b A, b B}
A 相对位移B
删除的点 ? 保留的点
原点位于结构元素中的膨胀操作
+
图像 A
结构元 B
A 相对位移B
原点不在结构元素中的膨胀操作
增加的点
删除的点
+
?
? ?
增加的点
图像 A
结构元 B
此时膨胀的结果与A没有任何关系,即:
( A B) A
4、腐蚀的运算
a、基于腐蚀定义本身的运算
+
保留的点
腐蚀,然后用 B 对腐蚀结果进行膨胀。 开操作的另一定义为:
A B {( B) x | ( B) x A}
关闭操作为:
A B ( A B)
-
B
即:使用结构元素 B 对集合 A 的闭操作是用 B 对 A
膨胀,然后用 B 对腐蚀结果进行腐蚀。
2、开操作与闭操作的几何解释
· 结构元
C {c | c A or c B}
C A B
4、交集:
C {c | c A and c B}
C A B
5、补集: 6、集合的差:
A {x | x A }
c
A B {x | x A , x B } A Bc
7、位移:
( A) x { y | y a x , a A }