线性时不变系统
线性时不变系统
第6章线性时不变系统尹霄丽6.1 引言MATLAB •••利用函数,和计算LTI系统的输出;研究离散时间LTI系统的多conv ls 个性质主要;连续i 时内容:间卷积m 的filter 数值近似;例1[][][][]1, 040, n x n n y n x n x n ≤≤⎧=⎨⎩=∗考虑如下有限长信号其余(a)用解析方法计算。
[][][](b) 编程实现% exe2_1_a.m, see also exe2_1_b.mx=ones(1,5);nx=0:4;y=conv(x,x);ny=(min(nx)+min(nx)):(max(nx)+max(nx)); h=stem(ny,y);set(h,'linewidth',2);xlabel('n');ylabel('x[n]*x[n]');作业3[][][][][][][]1, 050, , 050, (a) ;(b) MATLAB(c)conv y n x n nn n h n ny n x n h n x n h n ≤≤⎧=⎨⎩≤≤⎧=⎨⎩=∗考虑下面有限长信号:其余其余不用编程,请计算卷积和用生成信号和,并画出相应的图形。
用计算卷积和,并用stem画出其图形。
注:图形请加上必要的标注。
6.3 MATLAB函数filterfilterFILTER One-dimensional digital filter.Y = FILTER(B,A,X) filters the data in vector X with the filter described by vectors A and B to create the filtered data Y. The filter is a "Direct Form II Transposed"implementation of the standard difference equation:a(1)*y(n) + a(2)*y(n-1) + ... + a(na+1)*y(n-na) =b(1)*x(n) + b(2)*x(n-1) + ... + b(nb+1)*x(n-nb)[][][][]00LTI 1 filte r KMk mk m x x x a y n k b x n m x n n n n N y n ==−=−≤≤+−∑∑命令计算由线性常系数差分方程表征的因果系统在某一给定输入时的输出。
LinearTimeinvariantSystem(线性时不变系统)

Linear Time-invariant System(线性时不变系统)2-1:Discrete-Time LTI System:The Convolution Sum(离散LTI系统:卷和)本节的关键在于:把任意离散信号x[n]表示为若干个脉冲信号的叠加。
这样,信号x[n]输入某一个系统的输出y[n],便可以等效为把这些脉冲信号分别输入这个系统之后,再把它们的输出结果叠加。
当系统是LTI系统时,对应每个脉冲信号输入的输出函数都可以由对应单位冲激函数的响应δ[n]的输出h[n]进行时移和乘以系数得到。
把每个脉冲输入的输出叠加便得到了输入信号x[n]的输出y[n]。
用脉冲信号表示任意信号:可以把x[n]看作x[0].δ[n]+ δ[n-1].x[1]+ δ[n-2].x[2]……即P75 2-2式对一个系统LTI,当输入信号为δ[n]时的输出信号h[n]称为单位冲激响应(unit impulse response)卷和而对于每个x[k].δ[n-k],输入系统后的输出为hk[n]=x[k].h[n-k],因此,x[n]输入后的输出y[n]便应当是全部hk[n](k从负无穷取到正无穷)的累加。
换言之得到了P78 2-6式(公式请自己看啦,输入太麻烦了,呵呵呵呵)该公式称作x[n]和h[n]的卷和或卷积和(Convolution Sum)。
写作x[n]*h[n]。
是一种基本的运算方式,由两个函数卷和得到一个新函数。
对LTI系统而言,就是输入x[n]与单位冲激响应卷和,得到输出信号y[n]。
x[n]*h[n]=y[n]对于有限长序列卷和的运算:竖式法比较简单。
2-2:continuous-time LTI systems:the convolution integral(连续时间LTI系统:卷积)与离散系统类似,本节的核心也是把输入的一个连续时间信号从时间上拆分成无数个冲激信号的叠加,然后对于每个冲激信号去求它输入这个系统得到的输出,再把所有的这些输出叠加起来,从而得到原信号输入系统的输出。
线性时不变系统
x(k∆τ).∆τ.h(t −k∆τ)
则系统对输入x(t)的总响应为所有冲激响应之和: 则系统对输入x(t)的总响应为所有冲激响应之和: x(t)的总响应为所有冲激响应之和
yf (t) ≈ ∑x(k∆τ).∆τ.h(t −k∆τ)
当:
∞
∆τ →dτ,k∆τ →τ
∞ −∞
∞
k=−∞
求和符号改为积分符号
x1 (t ) = e −t 和x2 (t ) = 5e −t 求分别输入
时的输出y(t)。 。 时的输出
解:
y1 (t ) = (e −2t + e − t )u (t )
y2 (t ) = (−3e
−2 t
+ 5e )u (t )
−t
2.2 单位冲激响应
单位冲激响应: 单位冲激响应:线性时不变系统在单位冲激信 的激励下产生的零状态响应。 表示。 号 δ (t ) 的激励下产生的零状态响应。用h(t)表示。 表示 即:
x(t) = ∫ x(τ )δ (t −τ )dτ
−∞
y f (t) = ∫ x(τ )h(t −τ )dτ
上述积分是x(t)与h(t)之间的一种二元运算, 上述积分是x(t)与h(t)之间的一种二元运算,用 x(t) 之间的一种二元运算 y(t)=x(t)*h(t)表示 表示。 y(t)=x(t)*h(t)表示。即
第二章 线性时不变系统 (LTI:Linear Time Invarient) :
重点: 重点: 理解并掌握卷积积分与卷积和的概念与相关性质; 理解并掌握卷积积分与卷积和的概念与相关性质; 掌握LTI系统的性质; 系统的性质; 掌握 系统的性质 难点: 难点: 深刻理解卷积积分与卷积和的概念; 深刻理解卷积积分与卷积和的概念;
第2章 线性时不变系统
0 t
2.4 LTI系统的性质
举例:累加系统(accumulator)
y[n]
k
x[k ]
n
它是LTI系统,其单位脉冲响应为
h[n] u[n]
h[n] k [n] Memory h[n] 0, n 0 Causal
2.4 LTI系统的性质
从以上推导得出以下结论: DT LTI 系统的单位阶跃响应是其单位脉冲响应的求和函数; DT LTI 系统的单位脉冲响应是其单位阶跃响应的一次差分 同理,对于CT LTI 系统: 单位阶跃响应是其单位冲激响应的积分函数
s(t ) h( )d
t
单位冲激响应是其单位阶跃响应的一阶导数
2.7小结
2.1概述
(1)线性与时不变性(Linearity and Time-Invariance): 很多物理过程都具有这两个性质 这些物理过程能用LTI系统表征 可以对LTI系统进行详细的分析:
能够将LTI系统的输入用一组基本信号的线性组合表示 根据该系统对基本信号的响应,利用叠加性质求得整个系统的输出
2.4 LTI系统的性质
离散时间LTI系统用 卷积和表示
连续时间LTI系统用 卷积积分表示
LTI系统的特性可以 完全由其单位冲激响 应决定
2.4 LTI系统的性质
卷积的交换律性质 The Commutative Property of Convolution
2.4 LTI系统的性质
卷积的三个代数性质:交换律、结合律、分配律 Three algebraic properties of convolution
线性时不变系统模型的操作与运算
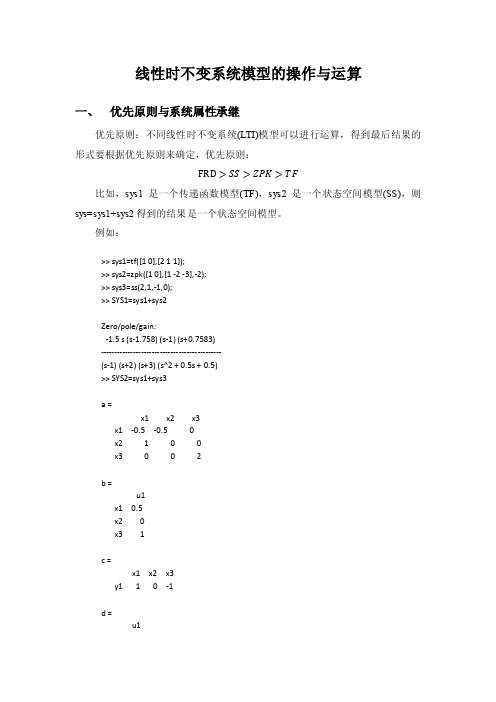
线性时不变系统模型的操作与运算一、优先原则与系统属性承继优先原则:不同线性时不变系统(LTI)模型可以进行运算,得到最后结果的形式要根据优先原则来确定,优先原则:FRD>SS>ZPK>TF比如,sys1是一个传递函数模型(TF),sys2是一个状态空间模型(SS),则sys=sys1+sys2得到的结果是一个状态空间模型。
例如:>> sys1=tf([1 0],[2 1 1]);>> sys2=zpk([1 0],[1 -2 -3],-2);>> sys3=ss(2,1,-1,0);>> SYS1=sys1+sys2Zero/pole/gain:-1.5 s (s-1.758) (s-1) (s+0.7583)---------------------------------------------(s-1) (s+2) (s+3) (s^2 + 0.5s + 0.5)>> SYS2=sys1+sys3a =x1 x2 x3x1 -0.5 -0.5 0x2 1 0 0x3 0 0 2b =u1x1 0.5x2 0x3 1c =x1 x2 x3y1 1 0 -1d =u1y1 0Continuous-time model.>> SYS3=sys1-sys2+sys3a =x1 x2 x3 x4x5 x6x1 -0.25 1 0 0 0 0x2 -0.4375 -0.25 7.564e-009 1.331 -1.711 0x3 0 0 1 9.769e-009 -1.256e-008 0x4 0 0 0 -2 1 0x5 0 0 0 0 -3 0x6 0 0 0 0 0 2b =u1x1 0x2 1.015x3 7.451e-009x4 0x5 2.136x6 1c =x1 x2 x3 x4 x5 x6y1 -0.6156 2.462 0 0 -0 -1d =u1y1 0Continuous-time model.承继原则:系统运算中,系统中一些属性被保留到系统运算结果里。
线性系统理论全

稳定性判据与判定方法
稳定性判据
在控制工程中,常用的稳定性判据有Routh判据、Nyquist判据、 Bode判据等。这些判据通过分析系统的特征方程或频率响应来判 断系统的稳定性。
判定方法
除了使用稳定性判据外,还可以通过时域仿真、频域分析、根轨 迹法等方法来判定系统的稳定性。这些方法各有优缺点,适用于 不同类型的线性系统和不同的问题背景。
100%
线性偏差分方程
处理离散空间和时间的问题,如 数字滤波器和图像处理等。
80%
初始条件与边界条件
在差分方程中,初始条件确定系 统的起始状态。
状态空间模型
状态变量与状态方程
表示系统内部状态的变化规律 ,揭示系统动态特性。
输出方程
描述系统输出与状态变量和输 入的关系,反映系统对外部激 励的响应。
状态空间表达式的建立
复频域分析法
拉普拉斯变换
将时域信号转换为复频域信号,便于分析系统的稳定性和动态性 能。
系统函数
描述Байду номын сангаас统传递函数的复频域表示,反映系统的固有特性和对输入信 号的响应能力。
极点、零点与稳定性
通过分析系统函数的极点和零点分布,可以判断系统的稳定性以及 动态性能。
04
线性系统稳定性分析
BIBO稳定性
01
线性系统理论全
目
CONTENCT
录
• 线性系统基本概念 • 线性系统数学模型 • 线性系统分析方法 • 线性系统稳定性分析 • 线性系统能控性与能观性分析 • 线性系统优化与综合设计
01
线性系统基本概念
线性系统定义与性质
线性系统定义
满足叠加性与均匀性的系统。
线性系统性质
信号处理与系统分析 第2章线性时不变系统
从波形的角度来观察离散时间信号,它可以 看成是由许多加权了的单位冲激信号组合 而成的
x[n] x[1] [n 1] x[0] [n] x[2] [n 2]
对于任意的离散时间信号:
累加序号 自变量
加权值 移位的冲激信号
x[n]
k
x[k ] [n k ]
n
卷积公式是无穷多项求和,而我们实际遇到的常 常是有限长度序列,特别是在计算机离线处理的场 合,因为计算机不可能处理无穷多的信息。 在进行有限长度的序列的卷积时候,长度为N和M 的2个序列作卷积时,反转序列从左到右进入重叠 直至移出重叠,只有存在重叠项时,卷积和才可能 非零。 卷积序列的长度为M+N-1。
求解系统响应的卷积方法是系统分析的重要工具。
单位冲激响应h[n]完全描述了线性时不变系统的变换 规律。不同的系统输入,都在h[n]的作用下产生相应的 响应,因此,给定了一个LTI系统的单位冲激响应h[n]就 等于给定了该系统。
从计算某一个特定点的角度来看
yy [n [n 0]
k k
第2章 线性时不变系统
线性时不变(简称LTI,Linear, Time-invariant)系统
为什么引入LTI ?
如果不对系统的性质加以限制,那么分析 一个系统将是十分困难的。 给系统加上线性和时不变性的限制,那么 系统的分析将变得十分简便。 LTI系统的分析还为非线性系统的分析方法 提供了思路。例如,线性时不变系统可以 用冲激响应来表达,非线性系统可以用 Volterra级数来表达。
上式应该理解为许多以为n自变量的函数的相 加,而不是数值相加。
许多移了位的冲激信号的加权和,构成了x[n] 。
特别地,我们有
线性时不变系统--习题
dt
dt
dt
et t et t
t t t
t
方法二没有注意利用冲激函数的性质,求解过
程较繁。另外,对冲激偶信号的性质
f t t f 0 t f 0 t
往往被错误写成
f t t f 0 t
从而得出错误结论。
(2) f t t e3 δτ d τ
1 O t 3 1
t
t 3 1
t
3
1
即2 t 4
g(t) 1 1(t )d t 2 t 2
t3 2
42
T4
1 f1
f2 t
t
1 O
1 t3
t-31
即t 4
gt 0
卷积结果
f1t
1
1 O 1 t
f2 t
3
2
O
3t
t2 t 1
g(t
)
4 t
t
2
2
4
x(t t0 ) h(t) x(t) h(t t0 ) y(t t0 )
例1 粗略绘出下列各函数式的波形图
(1) f1t u t2 1
(2)
f2 t
d dt
et cos tut
描绘信号波形是本课程的一项基本训练,在绘 图时应注意信号的基本特征,对所绘出的波形,应标 出信号的初值、终值及一些关键的值,如极大值和极 小值等,同时应注意阶跃、冲激信号的特点。
设x3(t) ax1 t bx2 t x3 t y3 t x32 t ax1 t bx2 t 2 a2 x12 t b2 x22 t 2abx1 t x2 t
a2 y1 t b2 y2 t 2abx1 t x2 t ay1 t by2 t
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
线性时不变系统
传递函数
• 在考虑扰动的情况下,系统的传递函数可以写成
y (t ) = G (q )u (t ) + H (q )e(t )
(2.12)
y (kT ) =
∫τ
∞ =0
g (τ )u (kT − τ )dτ
线性时不变系统
稳定性
• 系统的传递函数如果满足以下条件
G (q ) =
∞ ∞
∑
k =1
线性时不变系统
传递函数
• 我们定义q算子
qu (t ) = u (t + 1)
• 同样
q −1u (t ) = u (t − 1)
(2.9)
(2.10)
• 那么(2.6)就可以写成
y (t ) =
∞ k =1
∑ g (k )u(t − k ) =∑ g (k )q
k =1
∞
−k
u (t )
(2.11)
y (t ) = G (q )u (t )
y (kT ) =
∫τ
∞ =0
g (τ )u (kT − τ )dτ
线性时不变系统
传递函数
• 如果系统是稳定的,随着k的增大,g(k)趋近于0, 则上式可以简化为
G (q ) = ∑ g (k )q − k
k =1
n
• 其中g(n+1),g(n+2),…接近于0,可以忽略不计
(2.3)
y (kT ) =
∫τ
∞ =0
g (τ )u (kT − τ )dτ
线性时不变系统
单位脉冲响应模型
• 将(2.3)带入(2.2)
y (kT ) = =
∫τ
∞ =0
g (τ )u (kT − τ )dτ =
lt = ( l −1)T
∑ ∫τ
l =1
∞
lt = (l −1)T ∞
g (τ )u (kT − τ )dτ
y (kT ) =
∫τ
∞ =0
g (τ )u (kT − τ )dτ
线性时不变系统
传递函数
• 为了适用阶跃响应实验,我们对系统的传递函数 进行一定的变换
y (t ) = G (q )u (t )
• 我们要把u(t)绝对值变成增量 u(t)
∆u (t ) = u (t ) − u (t − 1) = (1 − q −1 )u (t )
∞ −k = g (k )q u (t ) = G (q )u (t ) k =1
∑
y (kT ) =
∫τ
∞ =0
g (τ )u (kT − τ )dτ
线性时不变系统
传递函数
• G(q)就是系统的传递函数
G (q ) =
∞
∑
k =1
g (k )q − k
(2.9)
• 不考虑扰动项
线性时不变系统
单位脉冲响应模型
• 对于一个离散辨识系统,假定每隔T个时刻,我 们观察系统的输出。那样系统输出将在以下时刻 被观测tk=kT, k=1,2,…
y (kT ) =
∫τ
∞ =0
g (τ )u (kT − τ )dτ
(2.2)
• 常数T为采样周期 • 在计算机控制系统中,一般两个采样周期之间的 系统输入是不变的 u (t ) = u k , kT ≤ t < (k + 1)T
∑ ∫τ
l =1
∞
g (τ )dτ u k −l =
∑g
l =1
(2.4)
(l )u k −l
T
• 其中
g T (l ) =
∫τ
lT = (l −1)T
g (τ )dτ
(2.5)
y (kT ) =
∫τ
∞ =0
g (τ )u (kT − τ )dτ
线性时不变系统
单位脉冲响应模型
• 为了简化(2.5),我们可以省略掉T
• 那么
∆u (t ) u (t ) = (1 − q −1 )
y (kT ) =
∫τ
∞ =0
g (τ )u (kT − τ )dτ
线性时不变系统
传递函数
• 那么传递函数可以写成增量形式
G (q) y (t ) = ∆u (t ) −1 1− q
• 我们设
G (q) ~ G (q) = 1 − q −1 ∞ ~ ~ G (q) = ∑ g (k )q −k
• 观察系统的输出,t=0的时刻有一个脉冲输入,因 为这个脉冲输入,使得系统在t=1,2,3,…时刻有输 出 • 如果脉冲输入的幅值是1的话,那么g(k)=y(k), k=1,2,…
y (kT ) =
∫τ
∞ =0
g (τ )u (kT − τ )dτ
线性时不变系统
传递函数
• 脉冲响应实验是有局限性的,因为脉冲的持续时 间只有一个采样周期,使得系统接收的输入能量 不够大,因此系统的响应幅度有限,测量不准可 能造成误差 • 能否使用系统的阶跃响应曲线来确定g(k)的值
k =1
• 那么
~ y (t ) = G (q )∆u (t )
y (kT ) =
∫τ
∞ =0
g (τ )u (kT − τ )dτ
线性时不变系统
传递函数
• 在t=0时刻,我们施加一个单位的系统输入增量, 即一个阶跃输入
y (kT ) =
∫τ
∞ =0
g (τ )u (kT − τ )dτ
线性时不变系统
y (t ) =
∞
∑ g (k )u(t − k )
k =1
t = 0,1,2...
(2.6)
• 这样可以看出,系统在一个采样周期t的输出y(t) 是可以通过过去时刻的输入u(t-k)以及系统的模型 g(k), k=1,2,3…决定的,这就是系统的单位脉冲响 应模型
y (kT ) =
∫τ
∞ =0
g (τ )u (kT − τ )dτ
– 就是系统的参数不随时间而变化,即不管输入信号作用 的时间先后,输出信号响应的形状均相同,仅是从出现 的时间不同。用数学表示为 T[x(n)]=y[n]则 T[x(nn0)]=y[n-n0],这说明序列x(n)先移位后进行变换与它先 进行变换后再移位是等效的。
线性时不变系统
什么是线性时不变系统
• 线性时不变系统(Time-invariant Linear System)
y (kT ) =
∫τ
∞ =0
g (τ )u (kT − τ )dτ
线性时不变系统
传递函数
• 如何通过设计实验来获得g(k)的数值呢,其中 k=1,2,…,n • 方法1是使用脉冲响应的方法
脉冲输入
系统响应输出
y (kT ) =
∫τ
∞ =0
g (τ )u (kT − τ )dτ
线性时不变系统
传递函数
线性时不变系统
扰动的影响
• 如果考虑扰动的影响,(2.6)可以写成
y (t ) =
∞
∑ g (k )u(t − k ) + v(t )
k =1
(2.7) v(t)
u(t)
线性连续系统
y(t)
• 扰动的种类
– 测量误差(噪音,漂移) – 不可控的输入(如室内温度控制)
y (kT ) =
∫τ
∞ =0
g (τ )u (kT − τ )dτ
传递函数
• 系统的输出为
y (kT ) =
∫τ
∞ =0
g (τ )u (kT − τ )dτ
线性时不变系统
传递函数
• 通过观察t=1,2,3,…时刻的系统的输出,就可以得 到
~ g (k ) = y (k )
• 那么传递函数G(q)就可以得到
~ G (q ) = (1 − q )G (q )
−1
y (kT ) =
g (k )q − k ,
∑ g (k ) < ∞
k =1
(2.13)
• 我们就说系统是BIBO( bounded-input, boundedoutput)稳定的,即当输入u(t)的幅值在一定的边 界内|u(t)|<C,那么输出y(t)也是在一定的边界内
线性时不变系统
扰动的量化
• 我们可以用一种比较简单的方法来描述扰动
v(t ) =
∞
∑ h(k )e(t − k )
k =1
(2.8)
• 其中e(t)为白噪声 • 白噪声是指功率谱密度在整个频域内均匀分布的 噪声,所有频率具有相同能量的随机噪声称为白 噪声。
y (kT ) =
∫τ
∞ =0
g (τ )u (kT − τ )dτ
– 既满足叠加原理又具有时不变特性,它可以用单位脉冲 响应来表示
u(t)
线性连续系统
y(t)
y (t ) =
∫τ
∞ =0
g (τ )u (t − τ )dτ
(2.1)
– 如果我们知道g(τ)和系统的输入u(s),就可以求出系统的 输出y(t)
y (kT ) =
∫τ
∞ =0
g (τ )u (kT − τ )dτ
∫τ
∞ =0
g (τ )u (kT − τ )dτ
线性时不变系统
传递函数
对于系统扰动项,我们可以用同样的方法得到
v(t ) = H (q )e(t )
(2.10)
•
• 其中
H (q ) =
∑
k =1∞h( k )q − k(2.11)
y (kT ) =
∫τ
∞ =0
g (τ )u (kT − τ )dτ