行星齿轮的实体建模与运动仿真
行星齿轮传动的机构仿真及多体接触分析

O
0 0 2 0 0. 0 8 1 4 6 0
,s /
// _ 1
在
坐标 系 中 t 时刻 A 坐标 为 : 韵
() 1
Y = Fsn c i8
式中: n为中心距 ;c r 为行星轮半径 ; | t 8为 时刻行星轮相对行
星架 的转 角 , 卢=2 n 一 t 订( n )。 利用坐标变换公式 :
行 星轮 与 内齿 轮 节 点 处 啮合 位 置 , 时刻 A点 旋 转 至 A 点 。 t
程 万康 : 星齿轮 传 动 的机构 仿 真及 多体 接 触分析 行
轮 及 行 星架 的 受 力 情 况 。
架之问 的旋转 副施 加力 矩 59 9 3N・ l令 内齿 圈与行 星 6 . n, 架之间旋转副的转速 为 0 即行 星架 不输 出运 动 。利用 I , —
DA E S软件 进 行 力 学 仿 真 时 , 置 求 解 时 间 为 1s 求 解 步 数 设 , 为 300步 , 解 可 得 图 5 图 6及 表 3所 示 的 太 阳轮 、 星 0 求 、 行
个 行 星 轮 , 运 动 仿 真 过 程 中 , 动 副 的 定 义包 括 3个 旋 转 故 运 副 和 2个 齿 轮 副 。 即太 阳轮 与行 星 架 之 间 、 内齿 圈 与 行 星架 之 间 、 星 轮 与 行 星 架 之 间 用 旋 转 副 来 定 义 , 阳轮 与 行 星 行 太 轮 之 间 、 星轮 与 内 齿 圈 之 问 用 齿 轮 副 未 定 义 。 将 内齿 圈定 行 义 为 固定 件 , 太 阳 轮 与 行 星 架 之 问 的 旋 转 副 施 加 转 动 。 由 对 于 太 阳轮 额 定 输 入 转 速 为 4 0rmi( 6 83rs , 阳 轮 1 n 即 .3 / ) 太 /
基于CATIA的齿轮参数化设计建模及运动仿真
基于CATIA的齿轮参数化建模及运动仿真作者:许昌军 指导老师:朱梅(安徽农业大学工学院 07机械设计制造及其自动化 合肥230036)摘要:文章介绍了运用参数化三维软件CATIA对渐开线直齿轮及斜齿轮进行参数化三维建模。
通过GSD模块中的fog方式生成参数方程建立渐开线,再通过镜像、剪切、特征阵列等命令建立齿轮轮廓,通过拉伸、开槽等命令建立渐开线齿轮三维模型,大大提高了设计人员的工作效率。
然后用建模的直齿轮创建直齿轮库,最后进入电子样机运动模块(KIN)对两啮合齿轮进行运动仿真及干涉分析。
关键词:参数化 CATIA 运动仿真 渐开线直齿轮1 引言本文基于CATIA 的三维建模环境, 设计开发了渐开线直齿轮参数化设计系统,建立零件的3D模型, 为渐开线直齿轮的传动、仿真、优化设计、有限元分析打下基础。
用户只需根据修改齿轮参数就可以生成新的渐开线直齿轮, 减少繁琐复杂的重复劳动, 从而大大提高设计效率。
1.1CATIA软件介绍CATIA(Computer Aided Tri-dimensional Interface Application) 是法国达索(Dassault Systemes)飞机公司于1975年开始发展起来的一整套完整的3D CAD/CAM/CAE软件,CATIA V5作为新一代的CATIA版本,提供更多的新功能,其界面更加人性化,基于Windows的操作界面非常友好,因此使得复杂、枯燥的设计工作变得轻松而又愉快。
CATIA以强大的曲面设计功能在飞机、汽车、轮船等设计领域享有很高的荣誉。
2 CATIA参数化设计分析基于特征参数化设计的关键是特征及其相关尺寸、公差的描述,包括数据特性描述、规则特性描述、关系特性描述。
数据特性描述包含特征的静态信息和制造特性;规则或方法属性定义特征特定的设计和制造特性;关系特性描述特征间的相互依赖关系或定义形状特征间的位置关系。
形状特征实际上是几何实体的无任何语义的结构化组合,形状特征月特征(语义特征)间是一对多的关系,这体现了特征的应用多视角性。
行星齿轮建模方法

行星齿轮建模方法全文共四篇示例,供读者参考第一篇示例:行星齿轮是一种广泛应用于传动系统中的零部件,其主要功能是通过齿轮间的啮合转动来传递动力和扭矩。
在工程设计中,行星齿轮由于其结构紧凑、传动比大、承载能力强等优势而备受青睐。
本文将介绍行星齿轮的建模方法,包括建模过程、主要特点和实际应用等方面。
行星齿轮的建模过程通常分为几个步骤。
对行星齿轮的整体结构进行分析,确定主齿轮、行星轮和太阳轮的位置和数量。
接着,根据齿轮的模数、齿数和压力角等参数,确定齿轮的基本几何形状。
然后,根据齿轮的啮合原理,确定行星轮和主齿轮之间的啮合关系。
进行齿轮的细化建模,包括齿轮的齿形设计、齿面曲线生成和受力分析等。
行星齿轮的建模方法具有以下几个主要特点。
行星齿轮的建模需要考虑到该部件与其他传动部件的联接方式,以保证传动系统的正常运转。
行星齿轮的建模需要满足一定的几何形状和尺寸要求,以确保齿轮的传动效率和运转稳定性。
行星齿轮的建模还需要考虑到传动系统的运动学和动力学特性,以确保齿轮的设计符合实际应用需求。
行星齿轮的建模方法在实际工程设计中具有广泛的应用价值。
行星齿轮的建模可以帮助工程师快速准确地设计出符合技术要求的传动系统。
行星齿轮的建模可以帮助工程师优化传动系统的结构和性能,提高传动效率和承载能力。
行星齿轮的建模还可以为传动系统的故障诊断和维护提供重要的参考依据。
行星齿轮的建模方法是工程设计中的重要内容,通过科学合理的建模方法可以有效提高传动系统的设计水平和品质。
希望本文的介绍能够帮助读者更好地理解行星齿轮的建模方法,并在实际工程设计中加以应用。
【2000字】。
第二篇示例:行星齿轮是一种常见的传动装置,由行星轮、太阳轮、行星轴等部件组成,可以实现不同轴线间的传递运动,被广泛应用于工业生产中。
行星齿轮的建模是传动装置设计的重要环节,正确的建模方法可以保证传动的稳定性和可靠性。
本文将详细介绍行星齿轮的建模方法,希望能对读者有所帮助。
托森差速器建模及运动仿真

托森差速器建模及运动仿真关亮亮;赖文铁;徐宏波;徐子豪【摘要】汽车差速器是能够使左、右两个驱动轮实现以不同转速转动的一种机构.主要由左右半轴齿轮、行星齿轮(至少一组)及齿轮架组成.功用是当汽车转弯行驶或在不平路面上行驶时,使左右车轮以不同转速滚动,即保证两侧驱动车轮作纯滚动运动.托森(Torsen)差速器就是众多差速器中十分著名的一种.文章将针对托森差速器,在3D建模软件Solid Works中建立装配模型,并对其进行运动学仿真,通过对运动学仿真结果分析,得到其运动特性.【期刊名称】《汽车实用技术》【年(卷),期】2019(000)012【总页数】3页(P85-87)【关键词】托森差速器;运动仿真;Solid Works【作者】关亮亮;赖文铁;徐宏波;徐子豪【作者单位】辽宁工业大学汽车与交通工程学院,辽宁锦州 121001;辽宁工业大学汽车与交通工程学院,辽宁锦州 121001;辽宁工业大学汽车与交通工程学院,辽宁锦州 121001;辽宁工业大学汽车与交通工程学院,辽宁锦州 121001【正文语种】中文【中图分类】TP23引言汽车差速器是一种能够使左、右驱动轮实现不同速度转动的机械结构。
功用是当汽车转弯或驶过不平路面时,允许左右车轮以不同转速滚动,进而保证两侧驱动车轮作纯滚动。
Torsen(托森)差速器,是一种由美国人发明的差速器,从最初的A型差速器到B 型,再到现在的托森C 型差速器,一共经历三代产品。
它利用蜗轮蜗杆传动的不可逆性原理和齿面高摩擦条件,使差速器根据其内部差动转矩的大小而自动锁死或松开,这样可以有效地提高汽车的通过能力。
本文将针对第一代托森差速器,即A 型托森差速器(如图1 所示),进行3D 模型建立和装配及运动仿真,并对其差速结果和运动学特性进行分析。
图1 托森差速器1 装配模型本文章所建立3D 模型的A 型托森差速器,其主要参数如下:表1 托森差速器主要参数?利用三维软件Solid Works 建立模型如下图所示:图2 托森差速器三维装配透视图2 运动仿真2.1 仿真设置分别按以下几种工况进行运动仿真。
ProE Wildfire 5.0高级案例-齿轮机构仿真

案例:齿轮机构运动仿真
案例背景:
齿轮机构是用来传递空间任意两轴间的运动和动力. 齿轮机构的有点就是:结构紧凑,工作可靠,效率高,寿命长.
模型文件
案例建模所要用到的工作台:
装配工作台
案例建模时间 1.5小时
视频文件在光盘Pre/E-A05中
机构分析:
机构分析
该机构包括齿轮和齿条两种传动零件.
设计步骤
步骤8:选择菜单"应用程序"|"机构"进入机构环境
设计步骤
步骤9:选择菜单"编辑"|"连接",检查装配连接.
设计步骤
步骤10:单击"定义齿轮副连接"按钮 置传动比为14:34. ,定义圆锥齿轮连接,设
设计步骤
步骤11:单击"定义齿轮副连接"按钮 条比为180. ,定义齿条连接,设置齿
设计步骤
步骤16:定义质量属性,单击"定义质量属性"按钮 下拉类表中选择"组件",选择整个机构. ,在"参照类型"
设计步骤
步骤17:单击"定义阻尼器"按钮 20. ,添加阻尼器,将阻尼系数定义为
设计步骤
步骤18:单击"机构分析"按钮 单击"运行"按钮. ,在"类型"下拉列表中选择"动态",
设计步骤
步骤19:单击"生成分析的测量结果"按钮 ,进行结果分析.
小结
通过本例可以具备以下软件使用能力 创建凸轮机构运动仿真环境的能力. 创建带有载荷的运动仿真能力. 测量项目设置和检测结果的获取能力.
机械运动控制系统的动态建模与仿真分析
机械运动控制系统的动态建模与仿真分析引言:机械运动控制系统是工业和生活中的重要组成部分,它能够实现运动控制、定位和调节等功能。
动态建模与仿真分析是理解和优化机械运动控制系统的关键步骤。
本文将介绍机械运动控制系统的动态建模方法以及仿真分析的重要性。
一、机械运动控制系统动态建模方法机械运动控制系统的动态建模是基于控制理论和动力学原理的。
常见的动态建模方法包括基于拉普拉斯变换的传递函数法和基于差分方程的状态空间法。
1. 传递函数法传递函数法是一种常用的机械运动控制系统动态建模方法。
它通过建立控制系统的输入-输出关系,描述系统的传递特性。
在这种方法中,机械运动控制系统被建模为一个线性时不变系统,可以方便地进行频域分析和控制器设计。
2. 状态空间法状态空间法是另一种常见的机械运动控制系统动态建模方法。
它通过描述系统的状态和控制量的关系,提供了系统的全局信息。
状态空间法更加适用于复杂的非线性系统,并且可以通过仿真软件进行更为准确的仿真分析。
二、动态建模与仿真分析的重要性动态建模与仿真分析是改进机械运动控制系统的关键步骤。
通过建立准确的动态模型,可以准确预测系统的响应和性能指标。
仿真分析可以帮助设计师优化控制策略和参数设置,从而提高系统的稳定性、精度和效率。
1. 预测系统性能动态建模和仿真分析可以预测机械运动控制系统的性能,并评估不同控制策略的有效性。
通过仿真分析,可以确定系统的频率响应、阻尼特性以及系统的稳定性。
这些信息对于系统设计和改进非常重要。
2. 优化控制参数仿真分析可以通过改变控制参数,找到最优的控制策略。
例如,可以通过仿真分析确定合适的控制增益、采样周期等参数,从而提高系统的响应速度和抗干扰能力。
通过优化控制参数,可以避免实际试验中的大量试错,降低成本和风险。
3. 分析故障和异常动态建模与仿真分析还可以帮助工程师识别和分析系统故障和异常情况。
通过仿真,可以模拟机械运动控制系统在不同故障条件下的响应,预测故障对系统性能的影响,并提供相应的改进方案。
行星齿轮减速器的PROE的建模与运动仿真设计

目录行星齿轮减速器的PRO/E的建模与仿真 (1)摘要 (1)Abstract (2)第一章绪论 (5)1.1选题的依据、发展情况及其意义 (5)1.2 PRO/E行星齿轮的选题分析及设计内容 (6)1.3 主要的工作内容 (6)第二章NGW型行星轮减速器方案确定 (7)1.1 混合轮系的确定 (7)1.2周转轮系部分的选择 (7)1.3 NGW型行星轮减速器方案确定 (7)第三章NGW型行星减速器结构设计 (10)3.1基本参数要求与选择 (10)3.2方案设计 (10)3.3齿轮的计算与校核 (11)表3-3 行星轮系的几何尺寸 (23)3.4 轴上部件的设计计算与校核 (24)第四章PRO/E的建模与运动仿真 (33)4.1 PRO/E简介 (33)4.2行星轮减速器的PRO/E建模 (35)4.3行星轮减速器的装配 (37)4.4. 减速器的传动运动仿真与分析 (41)第五章结论 (49)参考文献 (50)行星齿轮减速器的PRO/E的建模与仿真摘要行星齿轮减速器作为重要的传动装置,在机械、建筑领域应用非常广泛。
它具有体积小、重量轻、结构紧凑、传动比大、效率高、运动平稳等特点。
本设计基于这些特点对行星齿轮进行结构设计,并对其进行PRO/E三维建模与运动仿真。
首先通过比较各种类型的行星齿轮的特点,确定其方案;其次根据相应的输入功率、输出速度、传动比进行传动设计与整体的结构设计;最后完成其PRO/E的三维建模,并对模型进行整体装配,并完成传动部分的运动仿真,并对其运动进行分析。
关键词:行星齿轮减速器、运动仿真、装配、三维建模T he Dynamic Simulation of Planetary Gear ReducerBased on Pro/EAbstractPlanetary gear reducer as an important transmission device is used extensively in machinery, construction area,which has the characteristics of small volume, light weight, compact structure, high efficiency, high speed ratio and smooth movement. The design is based on these features of planetary gear for structure design, and carries on the PRO/E 3d modeling and Dynamic Simulation. First, adopt the scheme through comparing various types of planetary gears’ characteristics, Secondly, according to the corresp onding input power、output speed and speed give the design of transmission and whole structure. Finally complete its the 3d modeling based on PRO/E, the whole assembly model and transmission part of Dynamic Simulation, and analyze its movement.Keywords: Planetary Gear Reducer、Dynamic Simulation、3D-modeling 、AssembleX X 大学毕业论文(设计)鉴定意见学号:姓名:专业:机械设计制造及其自动化毕业论文(设计说明书)页图表张第一章绪论1.1选题的依据、发展情况及其意义在机械制造业,现在有很多企业把产品的设计、分析、制造、产品的数据管理和信息技术集于一体.这种先进的管理方式属于企业信息化的范畴。
基于SolidWorks的行星齿轮机构运动仿真模型
基于SolidWorks的行星齿轮机构运动仿真模型发表时间: 2009-2-6 作者: 崔利杰龚小平李玉超来源: 万方数据关键字: CAE运动仿真行星齿轮机构 SolidWorks 二次开发 COSMO对SolidWorks软件进行了二次开发,实现了渐开线齿轮的精确建模,建立了某型直升机主减速器内两级行星传动机构在SolidWorks软件中的装配体模型,应用COSMOSMotion软件进行了机构运动仿真,为机构设计提供了一种高效、直观的仿真手段,提高了行星齿轮传动机构的分析设计能力。
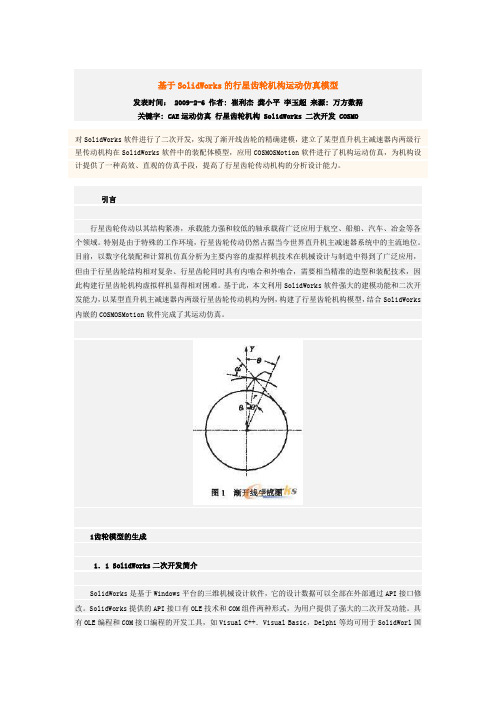
引言行星齿轮传动以其结构紧凑,承载能力强和较低的轴承载荷广泛应用于航空、船舶、汽车、冶金等各个领域。
特别是由于特殊的工作环境,行星齿轮传动仍然占据当今世界直升机主减速器系统中的主流地位。
目前,以数字化装配和计算机仿真分析为主要内容的虚拟样机技术在机械设计与制造中得到了广泛应用,但由于行星齿轮结构相对复杂、行星齿轮同时具有内啮合和外啮合,需要相当精准的造型和装配技术,因此构建行星齿轮机构虚拟样机显得相对困难。
基于此,本文利用SolidWorks软件强大的建模功能和二次开发能力,以某型直升机主减速器内两级行星齿轮传动机构为例,构建了行星齿轮机构模型,结合SolidWorks 内嵌的COSMOSMotion软件完成了其运动仿真。
1齿轮模型的生成1.1 SolidWorks二次开发简介SolidWorks是基于Windows平台的三维机械设计软件,它的设计数据可以全部在外部通过API接口修改。
SolidWorks提供的API接口有OLE技术和COM组件两种形式,为用户提供了强大的二次开发功能。
具有OLE编程和COM接口编程的开发工具,如Visual C++.Visual Basic,Delphi等均可用于SolidWorl国的二次开发,创建出用户定制的、专用的SolidWorks功能模块。
除此之外,SolidWorks还提供了内置的宏命令编程,使得SolidWorks的定制更加容易。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
冷加工
! " # " 年 第 $ 期 " !! ! ! !" # $ % & ’ ! ( ) * + , -. / 0 1" 2 ( #
图 (! 行星齿轮机构
由于 ( 个行星齿轮与右侧的齿盘齿轮分别做了“ 齿轮配 合” ,其中的 9 个行星齿轮与左侧的齿盘齿轮做“ 齿轮 配合” 。我们可以看到右侧的齿盘齿轮通过 ( 个行星齿 轮,带动左侧的齿盘齿轮转动起来,两个齿盘齿轮运动 方向相反,这样就完成了我们的初衷,制作的动画运转 界面如图 : 所示。
! ! ! ! ! ! !
"#$ % "#& % "#’’ 应用 !""#$%&’$() (* +!, - +!. - +!//
! ! !
行星齿轮的实体建模与运动仿真
辽宁省核工业地质局机械研究所! ( 沈阳 ! ""##$% ) ! 李 ! 晶
! ! 利用 ()*+,-)./0 的运动仿真功能,可以很方便地生 成工程机构的演示动画,让原先呆板的设计成品动起 来,用最简单的办法实现了产品的功能展示。在此,以 我厂生产的一种制动鼓盘车床中采用的行星齿轮机构与 大家进行探讨。 星齿轮啮合,带动左侧的齿盘齿轮转动,这样,3 个齿 盘齿轮的旋转方向相反。 ()*+,-)./0 开发了齿轮造型程 序,我们从设计库的 :))*;)< 中调出齿轮文件,输入齿 轮参数,就可以生成齿轮实体模型。重点是齿盘齿轮的 面齿轮建模有一些难度,先设法找到一个基准平面,然 后从齿轮库中调出一个参数相同的齿轮,将其渐开线齿 形复 制 到 这 个 基 准 平 面 上,将尺寸完全定义,再 进行切除和阵列,最后完 成该零件的实体建模,如 图 3 所示。 ( 3 ) 装配 ! 在制作模 型时,零件之间的装配关 系必须正确,否则将不能
图 :! 制作的动画播放界面
为了演示得清晰一些,将播放速度设为 94; ,计算 完成后,可以将动画保存为 #<= 格式,这样就可以用一 般的视频播放软件进行播放。 值得注意的是输出动画需要较长一段时间,而且播 放速度越慢,播放时间越长,计算机处理的速度越慢, 处理的时间越长,并且文件也越大。所以,占用内存太 大的话,就容易造成死机。
! ! !
!""#$%&’$() (* +!, - +!. - +!// "#$ % "#& % "#’’ 应用 ! ! ! ! ! ! !
节圆直径,( 个行星齿轮通过行星轮轴分别固定在空心 轴的 ( 个螺孔内,最后插入齿轮 0() ,它与左侧的齿盘 齿轮之间留出间隙,然后在空心轴上打销孔固定。这些 配合做好后,齿轮 0() 与空心轴固定,* 个齿盘齿轮和 ( 个行星齿轮只有一个转 动的自由度。装配后的 行星齿轮机构如图 ( 所 示。 (() 装 配 过 程 中 应注意的问题及解决方 法! 由于 * 个齿盘齿轮 和 ( 个行星齿轮均可以 自由旋转,装配后会发
#" 结语
在产品开发、工艺工装设计中,应用 "#C# 实体设 计仿真动画,可以快速展示产品的功能或性能,为产品 开发设计奠定基础。
( 收稿日期:3DDE1336 )
# !" ! " # " 年 第 $ 期 ! ! !" # $ % & ’ ! ( ) * + , -. / 0 1" 2 ( #
冷加工
图 3! 齿盘齿轮 876839
!" 行星齿轮的建模装配
( 1 ) 行星齿轮建模! 采用自下而上的设计方法:先 生成单个零件,然后将其插入装配体,再添加相应的配 合,最后完成装配体。如图 1 所示。
产生相应的运动,这是能否使用 ()*+,-)./0 进行运动仿 真的前提和关键。我们在实践中体会到选择正确的装配
图 1! 行星齿轮机构
12 空心轴! 32 齿轮 045! 42 行星轮轴 62 齿盘齿轮 076839! 72 行星齿轮 016
顺序,并且让首先固定的零件保持正确的空间位置也很 关键,否则装配体会东倒西歪,这时再修改配合就不大 容易了。所以,最好按照实际的工作状态进行装配。 我们新建装配体,先插入空心轴( 固定) ,再插入 3 个齿盘齿轮,它们端面齿轮的中心距 等 于 行 星 齿 轮的
该行星齿轮机构的传动方式为:齿轮 045 与空心轴 固定,右 侧的 齿 盘 齿 轮 076 、039 通 过 面 齿 轮与 4 个 行
&&&&&&&&&&&&&&p;&&&&&&&&&&&&&&&&&&&&&
其绕工作键轴心再作顺时针方向旋转 67= 复合运动,设 定时间为 32 90。然后再选中“ 高度旋转” 第二动画片 段、第三动画片段,编辑“ 追踪起始时间” 和“ 长度” , 整个结合键智能动画编辑完成。 ( 4 ) 根据“ 离合—制动” 原理,完成其余零部件 起始时间和运动时间编辑。 ( 6 ) 输出动画视频。在“ 文件” 下拉菜单中,输 出“ 动画 > ,采 用 #?@ 文 件 格 式 保 存,在“ 动 画 帧 尺 寸” 的对话框中,选择“ 光滑渲染” ,开始输出动画, 输出的动画视频可用 -+A,)B0 资源管理器打开观看。
生齿轮干涉的现象,这在后续进行“ 齿轮配合” 时,与 实际运动状况不符。因此,我们必须确定齿轮的初始位 置,使齿轮处于正确的啮合状态。 分别打开齿盘齿轮和行星齿轮,它们在做齿形切除 时,都用到一个包含一个圆和一条辅助中心线的草图, 其中辅助中心线分别通过齿槽对称线和齿对称线,该草 图用于齿轮在装配体下的定位。在装配体环境下,将草 图设置为可见。这时,辅助草图中的分度圆相切。在配 合中,选择两条辅助中心线共线,确定齿轮的初始位 置,即定位。这时,由于完全定义,各齿轮处于固定状 态,不能转动。为了使用“ 模拟” 工具进行模拟,需将 定位配合压缩。但是,必须注意不能再用鼠标转动齿 轮,否则会破坏其初始位置。最后,在“ 机械配合” 中 的“ 齿轮配合” 中,将“ 比率” 设定为齿数比, “ 配合 实体” 选择辅助草图中的两个圆,这样可保证齿轮转动 过程中视觉上不发生干涉。注意: “ 配合实体” 千万不 能选择相啮合的齿面,否则,将不能转动了。
#" 结语
利用 +,-./0,123 软件,就可以方便地制作出丰富的 动画效果,将设计者的意图更好地传递给客户,提供更 好的直观感受。在实体建模、装配过程中,齿轮先定位 后压缩,以及运动仿真过程中遇到问题并解决问题的能 力得到了很大提高,也为我们今后处理同类问题开拓了 思路,具有极其重要的借鉴意义。
!" 行星齿轮的运动仿真
在 +,-./0,123 环境中,*44) 版之前制作机构的动 画,必须手动添加 56.758,1 插件,但是 *44) 版省去了手 动添加的麻烦。安装 +,-./0,123 时,采用最完整的安装 模式,就会自动加载“ 运动算例” ,即可实现该功能。 我们插入新建运动算例,算例类型选择“ 装配体运 动” ,单击“ 旋转马达” ,选择右侧的齿盘齿轮作为马达 方向,为了运动演示的清晰一些,将马达设定为匀速马 达 941 % 7.6,相对运动的零部件则默 认 为 整 个 装 配 体。