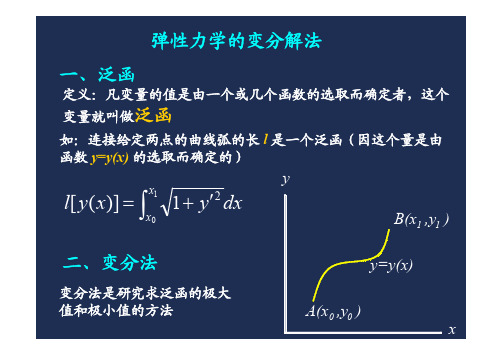
第四章 变分法
合集下载
数学物理方法变分法PPT学习教案

和
两点的
在附加条 件()
第35页/共43页
和两个积 分 和附加条 件
例3 求 是归一化 的,即 解 本题 是求泛 函的条 件极值 问题, 可化为 变分问 题
对应的E-L 方程为 其通解为
的极值, 其中 ,且已知
第36页/共43页
代入附加 条件 得到 代入归一 化条件 得到
于是得到 ,故原极 值问题 的解为
三、 变分
定义: 变分
如果我们 将泛函 取极值 时的函 数(或 函数曲 线)定 义为
并定义与 函数曲 线
邻近的曲 线(或 略为变 形的
第11页/共43页
曲线)作 为比较 曲线, 记为
其中 选定函数 ,规定
函在极值 处连续 .在研 究泛函 极值时 ,通常 将 而令
到泛函 就成为了 参数
是一个小 参数;
此即泛函 取极值 的必要 条件. 即泛函
必须是满 足泛函 的变分
的函数类
第22页/共43页
的极值函 数 .因此,
把泛函的 极值问 题称为 变分问 题. 注明 :E-L方 程是泛 函取极 值的必 要条件 ,而不 是充分 条件. 如果讨 论充分 条件, 则要计 算二阶 变分, 并考虑 其正、 负值,但 对于实 际问题 中,当 泛函具 有明确 的物理 涵义, 极值的 存在性 往往间 接地在 问题的 提法中 就可以 肯定, 所以极 值的存 在性是 不成问 题的, 只要解 出E-L 方程 ,就可以 得到泛 函的极 值.
由变分 法得到 的E-L方 程求解 ,一般 来说, 是很困 难的. 但在分析 力学中 往往还 是采用 这一办 法来求 解.因 为历史 悠 久,它自 有一套 办法.
(ii)近似 解 所谓近 似解即 由泛函 本身出 发,而 不需求 解E-L方 程,
弹性力学的变分解法
七、弹性力学参量的下标表示法前面给出的力分量、应力分量、应变分量和位移分量,其表示方法引用的是记号法;这是一种公认的弹性力学参量表示方法。
下标表示法书写简洁,便于力学问题的理论推导。
1. 下标符号具有相同性质的一组物理量,可用一个带下标的字母表示:如:位移分量u, v, w 表示为u 1, u 2, u 3,缩写为u i (i =1,2,3)坐标x, y, z 表示为x 1, x 2, x 3,缩写为x i (i =1,2,3)单位矢量i, j, k 表示e i (i =1,2,3)。
体力分量X, Y, Z 表示为X 1, X 2, X 3,缩写为X i (i =1,2,3)应力分量:z zy zx yz y yxxz xy x 可表示为:333231232221131211 缩写为:)3,2,1;3,2,1( j i ij4. 克罗内克(Kroneker)符号具有如下性质 )cos(j i ij e ej i e eji ji ij 01 100010001333231232221131211 ij ij (1)3ii j i ij A A ij 也称换名算子同理:ijkj ik A a (2)选取可能位移:十、利用位移变分原理的近似解法m mm m mm mm m w C w w v B v v u A u u 000其中系数是完全任意的m m m C B A 、、1、瑞雷—里兹法(1)是在边界上满足位移边界条件的设定函数000w v u 、、(2)是在边界上为零的设定函数m m m w v u 、、可见,由(1)、(2)选取出来的是可能位移w v u 、、。
变分法
tf
t0
M (t )(t )dt 0 。则在 [t 0 , t f ] 内, M (t ) 0 。
(用反证法容易证明,略) 。 二、无约束条件的泛函极值 求泛函 J
tf
t0
(t ), t ]dt (1)的极值,一般是用泛函极值的必要条件去寻找 F[ x(t ), x
一条曲线 x(t ) ,使给定的二阶连续可微函数 F 沿该曲线的积分达到极值。常称这条曲线为 极值曲线(或轨线) ,记为 x (t ) 。 1.端点固定的情况 设容许曲线 x(t ) 满足边界条件 x(t 0 ) x0 , x(t f ) x f ,且二次可微。 首先计算(1)式的变分:
t t f dt f 。寻找端点变动情况的必要条件,可仿照前面端点固定发问进行推导,即有
0 J
t f dt
t0
x , t ]dt | 0 F[ x x, x
t f dt
t0
)dt | 0 F ( x x, x x , t f dt f )dt f | 0(t t f dt f ) ( Fxx Fx x
tf x , t ] 0 dt J [ x(t ) x(t )] 0 F[ x x, x t0 tf
J
ห้องสมุดไป่ตู้
, t )x Fx , t )x ]dt [ Fx ( x, x ( x, x
t0
(2)
对上式右端第二项做分布积分,并利用 x(t 0 ) x(t f ) 0 ,有
件,有 J
tf
[ Fx
它是这类最简泛函取极值的必要条件。 最简泛函取极值的必要条件可以推广到多元泛函的情 况,如二元泛函
变分法PPT
变分法
Variational Methods
变分法简介
基本概念 经典变分问题 变分运算 变分的算法
基本概念
泛函 泛函是一个函数的表达式,取值取决于该表达式中的函
数,泛函是函数的函数。
I x2 F x, y, ydx x1
1) 除变量x外,泛函还可以包含其他的独立变量; 2) 除函数y(x)外,泛函还可以包含有许多以上述独立变量
y
yx
dy dx
x
y y y a
y y y a
利用δ沿可变曲线将F写成: F x, y y, y y
在任意x处,将F展开成关于y和y`的泰勒级数:
F
x,
y
y,
y
y
F
x,
y,
y
F y
y
F y
y
O
2
∴ F x, y y,
F的全变分:
y
y
F
x,
y,
y
F y
y
F y
y
O
2
(T) F F x, y y, y y F x, y, y
一阶变分:
F F y F y
y y
x2 F x, y y, y ydx x1
x2 F x, y, ydx
x1
x2 x1
F y
y
F y
y
dx
O
2
(T)I I I
x2 x1
2F y 2
y2
2
2F yy
y
y
2F
y2
y2
dx
I取极值的条件: I 0
F d F 0 y dx y
具有多个因变量:
I
Variational Methods
变分法简介
基本概念 经典变分问题 变分运算 变分的算法
基本概念
泛函 泛函是一个函数的表达式,取值取决于该表达式中的函
数,泛函是函数的函数。
I x2 F x, y, ydx x1
1) 除变量x外,泛函还可以包含其他的独立变量; 2) 除函数y(x)外,泛函还可以包含有许多以上述独立变量
y
yx
dy dx
x
y y y a
y y y a
利用δ沿可变曲线将F写成: F x, y y, y y
在任意x处,将F展开成关于y和y`的泰勒级数:
F
x,
y
y,
y
y
F
x,
y,
y
F y
y
F y
y
O
2
∴ F x, y y,
F的全变分:
y
y
F
x,
y,
y
F y
y
F y
y
O
2
(T) F F x, y y, y y F x, y, y
一阶变分:
F F y F y
y y
x2 F x, y y, y ydx x1
x2 F x, y, ydx
x1
x2 x1
F y
y
F y
y
dx
O
2
(T)I I I
x2 x1
2F y 2
y2
2
2F yy
y
y
2F
y2
y2
dx
I取极值的条件: I 0
F d F 0 y dx y
具有多个因变量:
I
变分法

x1
x0
F ( x) ( x)dx 0
(1.18)
则在 [x0,x1] 上就有F(x)≡0. 证明用反证法
1.3.2 欧拉方程
x1
[ y] F ( x, y, y )dx
x0
x1
x1
x0
F y F ydx y y b a
数ui(i=1,2,3)而变,[u]也是一个泛函。而ui必须满足的体积不
变条件
L、As、Φ都是依赖于可变化的函数。称其为自变函数,随 自变函数而变的量称为泛函。用符号φ、J 表示,记作 φ[y(x)]或φ(y)等。 • 变分法就是研究求泛函极大值和极小值的方法。
1.1.2 泛函自变函数的变分
• 函数y=y(x) ,自变量为x ,增量 △x, 称dx为自变 量x微分。 • 泛函φ[y(x)],自变函数为y(x),当△y(x) 变化无 限小时,称为自变函数的变分,表为δy(x) ,δy • δy是指函数y(x) 和跟它相接近的另一函数y1(x) 的微差。
x0 x0
x1
x1
(dy ) d ( y )
dy d ( y ) , 或 ( y) ( y) dx dx
3.注意:d ( xy) ydx xdy
( xy) x y
1.2.2 泛函极值的条件
泛函极值条件与函数极值条件具有相似的定义。如果
(u v) u v,
(uv) u v v u, (u v) (v u u v) / v 2
2
变分号可由积分号外进入积分号内
x1 x1 x0 x0
F ( x, y, y)dx F ( x, y, y)dx
变分法推导

k
L q j q j 0 q j
V (11b) 0 q j
将(11b)式乘以dt,并从t1到t2作定积分,有:
t2
t1
d L j dt q j 1
k
L q j q j dt 0 q j
若再考虑时间,则有3个坐标,
2) 一般地,用由q和t组成的(k+1)维空间内的 一点的运动表示,若在某一瞬时t,q1,q2,… …qk均有确定的值,则可在(k+1)维空间中找到 一个点,该点表示一质点在t时的位置
M (q j+δqj,t ) A
,
δq j M(qj ,t)
B
(k+1)维空间
④ 质点系的真实运动:
q=q(t) t
t+dt
变分:假设自变量t不变,改变函数q=q(t)的
形式,得到一个与原函数稍有差别的新函数
δq 式中: 是一个微小系数, dq q=q(t) p dt (t ) 是t的任意连续函数。 o 则: t t+dt 对于自变量的某一指定值,函数 q=q(t) 由于它的形式的微小改变而得到的改变量,称 为该函数的变分。 q 实际上代表了虚位移。 从图中可看出, p
2
mi r i 2
2
(4)
将此结果代回式(4),并引入质点系动能
得:
i mi r T 2 i 1
n k
n
2
d T T mi ai ri j q j i 1 j 1 dt q
q j
(9)
F r m a r 0
ri ri (q1, q2 ,, qk , t )
L q j q j 0 q j
V (11b) 0 q j
将(11b)式乘以dt,并从t1到t2作定积分,有:
t2
t1
d L j dt q j 1
k
L q j q j dt 0 q j
若再考虑时间,则有3个坐标,
2) 一般地,用由q和t组成的(k+1)维空间内的 一点的运动表示,若在某一瞬时t,q1,q2,… …qk均有确定的值,则可在(k+1)维空间中找到 一个点,该点表示一质点在t时的位置
M (q j+δqj,t ) A
,
δq j M(qj ,t)
B
(k+1)维空间
④ 质点系的真实运动:
q=q(t) t
t+dt
变分:假设自变量t不变,改变函数q=q(t)的
形式,得到一个与原函数稍有差别的新函数
δq 式中: 是一个微小系数, dq q=q(t) p dt (t ) 是t的任意连续函数。 o 则: t t+dt 对于自变量的某一指定值,函数 q=q(t) 由于它的形式的微小改变而得到的改变量,称 为该函数的变分。 q 实际上代表了虚位移。 从图中可看出, p
2
mi r i 2
2
(4)
将此结果代回式(4),并引入质点系动能
得:
i mi r T 2 i 1
n k
n
2
d T T mi ai ri j q j i 1 j 1 dt q
q j
(9)
F r m a r 0
ri ri (q1, q2 ,, qk , t )
变分法
寻求最优性能指标(目标函数)J (u(t)) (t f , x(t f ))
tf F(t, x(t),u(t))dt
t0
u(t) S 控制函数 f ,, F C1
x(t)
状态函数 t0固定,t f 、x(t f )自由
下面推导取得目标函数极值的最优控制策略u* (t) 和最优轨线 x* (t) 的必要条件。
变分法的基本引理 (x) C[x1, x2 ], (x) C1[x1, x2 ], (x1) (x2 ) 0, 则
x2 (x)(x)dx 0 x1
(x) 0,
x [x1, x2]
泛函极值的必要条件
F C(2) , 容许函数类S取为满足端点条件的二阶可微函数集合。
最优控制问题求解
J1 0
dt f , x(t f ), x, u,任意
x* , * 必满足正则方程:
x
H H
x
状态方程 协态方程
H (t, x*, u, * ) 满足 Hu 0
利用边界条件(端点条件)
x(t0 ) x0
(t f
)
x(t f
)
t2
J (x(t),u(t)) F(t, x(t), x' (t),u(t),u' (t))dt
t1
其欧拉方程为
Fx
Fu
d
dt d
dt
Fx' Fu '
0 0
端点变动的情况(横截条件)
在考虑泛函极值时,如果容许函数 x(t) 的一个端点不固定,而是在一条曲线
x (t) 上变动,于是端点条件可以表示为
变分原理-第4章
w x =l ql 4 = a = 0.11937 EJ
(g)
和精确解 w x =l =
1 ql 4 相比,小 4.5%,已达到工程精度。但如果进一步算应力, 8 EJ
则误差达 41%。
π πx 近似解: M (x ) = EJw = EJa cos ,最大值在 x = 0 处,有 2l 2l
2、 出弹性系统总位能表达式 Π (u i ) ,把式(3)所设的位移试验函数代入, 即得到由 3N 各参数 ain 表示的总位能表达式 Π (ain ) 。 3、 应用最小位能原理 δΠ = 0 ,求得以 ain 为参数的 3N 个代数方程-由于
u i0 、 u in 函数形式度已事先选定,变分时只有它们的幅值 ain 能发生变
二、 辽金法求解过程 为了导出伽辽金法,线对最小位能原理作一变换。由式(1)取变分得
δΠ = ∫∫∫
V
∂A δeij dV − ∫∫∫ Fi δu i dV − ∫∫ p i δu i dS ∂eij V Sp 1 (δui, j + δu j ,i )dV − ∫∫∫ Fiδui dV − ∫∫ p iδui dS 2 V Sp
(
)
(3)
上式中
∂ 2w ∂ 2w ∂ 2w 2 ∂ ∂w ∂ 2 w ∂ ∂w ∂ 2 w − = dxdy ∫∫ ∫∫ ∂x ∂y 2 − ∂y ∂x ∂x∂y dxdy ∂x∂y ∂ x ∂x 2 ∂y 2 S S
(1)
应力应变用挠度表示
Ez σx = − 1− µ 2 ∂2w ∂2w ∂x 2 + µ ∂y 2 ∂2w ∂2w µ + ∂y 2 ∂x 2
(g)
和精确解 w x =l =
1 ql 4 相比,小 4.5%,已达到工程精度。但如果进一步算应力, 8 EJ
则误差达 41%。
π πx 近似解: M (x ) = EJw = EJa cos ,最大值在 x = 0 处,有 2l 2l
2、 出弹性系统总位能表达式 Π (u i ) ,把式(3)所设的位移试验函数代入, 即得到由 3N 各参数 ain 表示的总位能表达式 Π (ain ) 。 3、 应用最小位能原理 δΠ = 0 ,求得以 ain 为参数的 3N 个代数方程-由于
u i0 、 u in 函数形式度已事先选定,变分时只有它们的幅值 ain 能发生变
二、 辽金法求解过程 为了导出伽辽金法,线对最小位能原理作一变换。由式(1)取变分得
δΠ = ∫∫∫
V
∂A δeij dV − ∫∫∫ Fi δu i dV − ∫∫ p i δu i dS ∂eij V Sp 1 (δui, j + δu j ,i )dV − ∫∫∫ Fiδui dV − ∫∫ p iδui dS 2 V Sp
(
)
(3)
上式中
∂ 2w ∂ 2w ∂ 2w 2 ∂ ∂w ∂ 2 w ∂ ∂w ∂ 2 w − = dxdy ∫∫ ∫∫ ∂x ∂y 2 − ∂y ∂x ∂x∂y dxdy ∂x∂y ∂ x ∂x 2 ∂y 2 S S
(1)
应力应变用挠度表示
Ez σx = − 1− µ 2 ∂2w ∂2w ∂x 2 + µ ∂y 2 ∂2w ∂2w µ + ∂y 2 ∂x 2
变分法求基态能量的步骤课件
THANKS
感谢您的观看
对非线性问题处理困难 对于非线性问题,变分法往往难以找到合适的变分形式来 逼近真实解,这使得变分法在处理非线性问题时具有一定 的局限性。
变分法的未来发展
结合其他方法
为了克服变分法的局限性,未来研究可以将变分法与其他方法(如有限元方法、有限差分 方法等)相结合,形成一种混合方法,以提高算法的稳定性和精度。
变分法求基态能量的 步骤课 件
目录
CONTENTS
• 变分法的基本概念
01
引言
变分法的定义
定义
变分法是数学的一个分支,主要研究泛函的极值问题,即寻找函数集合中使特 定泛函取得极值的函数。在量子力学中,变分法用于求解粒子在给定势能下的 基态能量。
公式表示
假设粒子在势能函数V(x)下运动,基态能量E0可以通过变分法求解的公式为: E0 = ∫ (dV/dx²) dx。
氢原子的基态能量求解
氢原子是原子物理中的基本模型,其基态能量的求解可以 通过变分法实现。
首先,我们需要确定氢原子的运动方程,即薛定谔方程。 然后,我们构造一个变分函数来近似描述氢原子的波函数。 接下来,将变分函数代入薛定谔方程,并求解得到基态能 量。最后,我们需要验证求解结果的正确性。
谐振子的基态能量求解
泛函的极值与变分法
泛函的极 值
泛函在给定约束条件下的最大值或最 小值。
变分法
通过求解泛函的极值问题,得到满足 约束条件的函数,从而得到系统的最 优解或基态解。
03
变分法在物理中的
应用
基态能量的定义
基态能量
系统最低的能量状态,即系统处于稳定平衡时的能量。
基态能量的物理意义
描述系统的基本性质和行为,是研究系统稳定性和相变等问题的关 键参数。
第四章-变分法和微扰法
2 ( c c ) 1 a 2 b d
ˆ d H aa a H a
ˆ d H bb b H b
ˆ d H H ab a H b ba
ˆ d 2c c H ˆ d c 2 H ˆ c12 a H 1 2 a 2 b b d a b
(0) ˆ (0) E (0) (1) d (0) H ˆ (1) E (1) (0) d H n n n n n n
(0) (1) (0) (0) ˆ (1) (0) n En n d n H n d (1) (0) (0) (0) ˆ (1) (0) En d n n n H n d (1) (0) ˆ (1) (0) En n H n d
ˆ (0) (0) E (0) (0) 0 : H n n n ˆ (0) (1) H ˆ (1) (0) E (0) (1) E (1) (0) 1 : H n n n n n n ˆ (0) (2) H ˆ (1) (1) E (0) (2) E (1) (1) E (2) (0) 2 : H n n n n n n n n 整理后得:
其中E n(0), λE n(1), λ2 E n(1), ... 分别是能量的 0 级近似 ,能量的一级修正和二级修正等; 而ψn(0), λψn(1), λ2ψn(2), ... 分别是状态波函数的 0 级近似,一级修正和二级修正等。
ˆ 代入定态Schrodinger方程 H n r E n r 得:
2 2 ˆ H r V r r E r 2
ˆ d H aa a H a
ˆ d H bb b H b
ˆ d H H ab a H b ba
ˆ d 2c c H ˆ d c 2 H ˆ c12 a H 1 2 a 2 b b d a b
(0) ˆ (0) E (0) (1) d (0) H ˆ (1) E (1) (0) d H n n n n n n
(0) (1) (0) (0) ˆ (1) (0) n En n d n H n d (1) (0) (0) (0) ˆ (1) (0) En d n n n H n d (1) (0) ˆ (1) (0) En n H n d
ˆ (0) (0) E (0) (0) 0 : H n n n ˆ (0) (1) H ˆ (1) (0) E (0) (1) E (1) (0) 1 : H n n n n n n ˆ (0) (2) H ˆ (1) (1) E (0) (2) E (1) (1) E (2) (0) 2 : H n n n n n n n n 整理后得:
其中E n(0), λE n(1), λ2 E n(1), ... 分别是能量的 0 级近似 ,能量的一级修正和二级修正等; 而ψn(0), λψn(1), λ2ψn(2), ... 分别是状态波函数的 0 级近似,一级修正和二级修正等。
ˆ 代入定态Schrodinger方程 H n r E n r 得:
2 2 ˆ H r V r r E r 2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
静态问题
max s.t.
max s.t.
F ( x) x0
F (t , xt ) xt 0 t 1, , T
动态问题
max s.t.
max s.t. max s.t.
F (t , x )
t 1 t
T
xt 0 t 1, , T
T
T
0
F (t , x(t ))dt
x(t ) 0 F (t , x(t ), x(t ))dt
S y ( x) y ( x) C1 [ x0 , x1 ] , y( x0 ) y0 , y( x1 ) y1
变分问题
最速下降问题的求解
1 y 1 F ( x, y, y y Fy ) 0, 或F y Fy C dx
泛函的变分 泛函 J[x(t)] 增量 △J[x(t)] 的线性主部称 为泛函的一阶变分,简称泛函变分,记 dJ 作 J ,则
J=
dx
|x* x
1 d 2J |x* ( x) 2 而泛函的二阶变分为: 2 J= 2 dx 2
也可以成为泛函的微分,泛函具有变分 时,称泛函是可微分的。
= 2x(t) x(t)dt
若x(t)=t 2 , 而 x(t) 0.1t, 则变分的值为
J= 0.2t 3 dt 0.05
0
1
例: 求 泛函 J= t F[t, x(t), x(t)]dt
0
t1
的变分。
解:
J= J[x x] | 0 =
• 定理: 泛函J[x(t)]的变分
J= J[x(t) x(t)] | 0
证明:
例 :试计算泛函
J x 2 (t)dt
0 1
的变分。
解: J = J[x(t) x(t)] | 0
=
1 0
1
0
[x(t) x(t)]2 dt | 0
J= F[t, x(t), x(t)]dt
t0 T
J= [x(T),T]
取极小。
3、波尔扎(Bolza)问题 中求出函数x(t),使泛函
T t0
从容许函数
J= [x(T),T]+ F[t, x(t), x(t)]dt
取极小 这是一般形式,三类问题可以互相转化。
无约束条件的变分问题
t1
t0
F[t, x+ x, x+ x]dt
F[t, x, x] F[t, x, x] = [ x+ x]dt t0 x x
t1
其中,我们应用了自变量的变分的导数等于导数变分, d [ x] dx(t) 即: [ ] dt dt
泛函的极值 泛函极值的定义 如果泛函J[x(t)]在x=x*(t)的邻域内,其增 量 △J=J[x(t)-x*(t)] ≥0 或 △J=J[x(t)-x*(t)] ≤0 则称泛函J[x(t)]在x=x*(t)处有极小值或极大值。
J[x(t)]= F[t, x(t), x(t)]dt
t0 T
式中x(t)在t0 <t< tf上连续,二阶可微,试寻求 使J[x(t)]取极值且满足给定的边界条件 t= t0 x(t0)=x0 t= T x(T)= xT
的函数x*(t).
• 根据推导过程得到欧拉方程:
F d F ( ) x* ( ) x* 0 x dt x
• • • •
y
Xf
t0、T固定; 无约束条件; 拉格朗日问题 端点时间给定后,端点状态分成四种形式
y
B
Xf
B
X*(t)
X0
X0
A
A
0
t0
T
x
0
t0
T
x
y
Xf
B
y
Xf
B
X0
X0
A
A
0
t0
T
x
0
t0
T
x
第一类和第四类问题有代表性
三、欧拉方程(Euler)
现讨论一个固定端点时间,固定端点状态的无 约束条件的变分问题。设所考虑的泛函数:
第四章
变 分 法
一、动态最优化方法
• 优化问题是经济学研究的一个重要方面. • 微积分方法和数学规划的方法,但是都是 基于静态和比较静态的分析. • 而动态的最优化问题要求在一个时期内 寻求选择变量的最优时间路径.
动态最优化方法的历史发展 • 最早由John Bernoulli (1696)用于解决最 速降线问题时提出. • Euler和Lagrange发展了一般的数学理论. • 最丰富的应用在物理领域,运用Hamilton 原理的最小作用原理. • 经济应用开始于20世纪二三十年代,主要 代表有Roos,Evans,Hotelling和Ramsey. • 五六十年代主要研究经济增长问题.
• 定理 若可微泛函J[x(t)]在曲线x=x*(t)上达到极值 (极大值或极小值),则泛函J[x(t)]在 x=x*(t)上的变分为零,即
J[x* (t)]=0
变分学问题是研究泛函的极值问题。一般可 以只讨论极小值问题。
• 变分学中的三个基本问题: 1、拉格朗日(Lagrange)问题,从容许函 数中求出函数x(t),使泛函 取极小。 2、麦耶尔(Mayer)问题, 从容许函数中 求出函数x(t),使泛函
ds v 2 gy dt
2
1 y ds dt dx 2 gy 2 gy
物体从A到B的 滑行时间为
T [ y( x)]
x1
1 y 2 gy
2
x0
dx
问题
求解
2 x1 1 y min dx x0 2 gy s.t. y ( x) S
K (0) K 0 , K (T ) 0
泛函的概念
什么是泛函?
dx(t) J (x t )dt 0 dt
1 2
(1)、若x(t)=t,则
5 J (t t)dt 0 6
1 2
(2)、若
x(t) e t
1
,则
e2 J (e2t e t )dt 1 0 2
a t b
• 距离定义不同,泛函的连续性也不同,相 应成为两阶连续或一阶连续。 • 线性泛函:连续泛函J[x(t)]如果满足下列 两个条件
(1) J[x1 (t)+x 2 (t)]=J[x1 (t)]+J[x 2 (t)] (2) J[cx(t)]=cJ[x(t)], c为任意常数
则称为线性泛函。
• 函数是变量与变量之间的关系,泛函是变量 与函数之间的关系,因此,泛函可以理解为 “函数的函数”。 • 自变量x(t)在定义区间连续可微,或者是连 续分段可微函数。 容许函数类。 • 在经典控制中往往要求自变量是连续可微的。
J[x(t)] F[t, x(t), x(t)]dt
t0
T
动态最优化的各种处理方法
• 例:在x-t平面上,连接两点(1,1) 和(2,2),使弧长最短。
解:l=
2
1
1+x 2 dt
F= 1+x 2 F d F 0 x dt x 推导得: x =ax +b,x * t
几种特殊最简泛函的Euler方程 • F不依赖于x′,即F=F(t,x),一般问题无解 • F不依赖于x,即F=F(t,x′),得到的结果是 一簇曲线。 • F只依赖于x′,即F=F(x′),极值曲线为直线 簇。 • F只依赖于x, x′,即F=F(x,x′)
0
x(t ) 0, x(0) x0
例子
• 假设一个工厂在时间T内的产量目标是B,在达到这 个产量是希望成本最小.假设x(t)表示在t时刻的产量 总数,因此x(0)=0,x(T)=B.因此工厂在t时刻的总成本 为: 2
c1 x(t ) x(t ) c2 x(t ) c1[ x(t )] c2 x(t )
时,有
J[x (t)] J[x * (t)]
则称泛函 J[x(t)] 在点 x*(t) 处是连续的。 其中,d(x,x*) 表示在两函数之间 x(t) 与 x*(t)两点间的距离:
d(x, x * ) max x(t) x * (t)
a t b
或
d(x, x * ) max{ x(t) x * (t) , x * (t) } x(t)
F 2x x F d F 欧拉方程为: ( ) 2x 2x 0 x dt x 即: x 0, x 求得通解为:x(t )=c1 cos t c 2 sin t 根据边界条件:c1 0, c 2 1,故 x * (t) sin t
1 y y
2
y 2 ~ C1 2 y 1 y
y 1 y
2
C
1
y c1 sin2 t y' ctgt y 1 ctg t C 1 或 dy dy ctgt dx ctgt dx
2
C1 x C 2 2 2t s in 2t y C 1 1 cos 2t 2
其中任意常数 C1 , C2 由边界条件 y( x0 ) y0 , y( x1 ) y1 确定
四、Euler方程的推广
含多个函数的泛函
t2
t1
F (t , y, y ', z, z ')dt
max s.t.
T
0
U (c(t ))dt U [ F ( K (t )) K (t )]dt