2017年中国工程机器人双足竞步项目交叉足赛
中国机器人大赛以及国际机器人足球锦标赛背景介绍

机器人竞赛是近年来国际上迅速开展起来的一种高技术对抗活动,它涉及人工智能、智能控制、机器人、通讯、传感及机构等多个领域的前沿研究和技术融合。
它集高技术、娱乐和比赛于一体,引起了社会的广泛关注和极大兴趣。
目前,国际上推出了各种不同类型的机器人比赛,如机器人足球、机器人舞蹈、机器人相扑、机器人投篮等,其中尤以机器人足球比赛最为引人注目。
标准的足球机器人比赛国际上主要有两个组织,一个是RoboCup,另一个是FIRA。
相比之下,RoboCup在国际上具有更大的影响力。
RoboCup的目标是:到2050年左右,机器人足球队可以按照国际足联的规则与世界杯冠军队进行一场举世瞩目的人机大赛,并战而胜之。
这个目标是人工智能与机器人学今后50年的重大挑战。
从莱特兄弟的第一架飞机到阿波罗计划将人类送上月球并安全返回地球花了约50年时间;同样,从数字计算机的发明到“深蓝”高性能计算机击败人类国际象棋世界冠军也花了约50年时间。
科学家们相信,经过约50年的努力,建立人形机器人足球队并完成上述目标是完全有可能实现的。
有史以来,人类不断地挑战自我,战胜自我,相信机器人足球队战胜人类世界冠军队将是人类智慧的又一次胜利。
将机器人足球作为一个标准问题和研究工具,其目的是促进人工智能和智能机器人科学与技术的研究与发展。
机器人足球是以体育竞赛为载体的高科技对抗,是培养信息、自动化领域科技人才的重要手段,同时也是展示高科技的生动窗口和促进科技发展的有效途径。
RoboCup有严格的比赛规则,它融趣味性、观赏性、高科技为一体,日益得到许多人,尤其是青少年的关注和喜爱,是人们了解和关注人工智能和智能机器人科学与技术的一座桥梁。
1996年,RoboCup国际联合会成立,并于1996年在日本举行了表演赛。
1997年首届RoboCup比赛及会议在日本的名古屋举行,从而为实现机器人足球队击败人类足球世界冠军的梦想迈出了坚实的第一步,以后每年举办一届。
机器人大赛双足竞步机器人组比赛规则
机器人大赛双足竞步机器人组比赛规则一、报名要求根据组委会要求、鼓励大家参与更多的比赛项目,特作出如下要求:1、比赛以小组为参赛单位2、每组的参赛队员最多可以包含3名队员,指导老师1名3、所有的参赛队为便于统一安排协调,各参赛单位报名时所留的联系人的联系方式(电话、邮箱)要确保为一人,且此人能来到比赛现场。
请联系人定期查看邮箱。
4、在报名信息确认之后,任何参赛队伍都不能更改队伍信息。
二、机器人结构及其规格的设定:双足竞步机器人类型(1):交叉足印竞步机器人结构只有双足、并只能以走路的方式来移动,机器人要分清楚正面及背面,以箭头方向作为正面,是自主式脱线控制,用不多于6只伺服马达和一个伺服马达控制板来完成,机器人最大尺寸为200mm(长)X 150mm(宽)X 300mm(高),重量不超过1Kg。
机器人头部要能放入(长)200mm X(宽)100mm长方格内。
类型(2):狭窄足印竞步机器人结构只有双足、并只能以走路的方式来移动,机器人要分清楚正面及背面,以箭头方向作为正面,是自主式脱线控制,用不多于6只伺服马达和一个伺服马达控制板来完成,机器人最大尺寸为200mm(长)X 150mm(宽)X 300mm(高),重量不超过1Kg.,狭窄足印竞步机器人,单足最大尺寸要能放入(长)150mm X(宽)60mm长方格内。
机器人头部要能放入(长)200mm X(宽)100mm长方格内。
狭窄足印要求:机器人由与脚底板相邻的舵机控制机器人的重心左右移动来实现前进(见下图1)与脚底板相连的舵机平放在脚底板上,舵机的扭力输出轴与前进方向平行。
(见下图3)交叉足印要求:机器人由与脚底板上部的舵机控制机器人关节的前后摆动来实现前进(见下图2)与脚底板相连的舵机平放在脚底板上,舵机的扭力输出轴与前进方向垂直。
(见下图4)三、竞赛内容:类型1:交叉足印竞步机器人:机器人通过步行的方式从起点线走到终点线(相距200cm,限宽60cm)。
我校学子在“2017中国工程机器人大赛暨国际公开赛”中喜获佳绩
赵芳,王红玉,魏小贊.含腐蚀缺陷长输管道极限栽荷的数值分析•13 •The Numerical Analysis of Limit Load ContainingCorrosion Defect Long - distance PipelineZHAO Fang1,W ANG Hong- Y u2,WEI Xiao- Yun1(1. Applied C hemistry Department;.Petrochemical Department,Lanzhou Petrochemical College of Vocational Technology,Lanzhou730060, China)Abstract :Limit load of external defect long- distance pipeline caused by corrosion was analyzed in this paper,with the nonlinear consideration o f material and size.Pipeline limit load changes with the size of the curve and is obtained by calculation of the finite element analysis software.DNVRP- F101 and SY/T6151 calculation results are compared,which proves the feasibility of calculating pressure pipeline limit load containing the finite element nonlinear.Key words :long- distance pipeline; limit load; finite element;nonlinearI消息报道I我校学子在“217中国工程机器人大赛暨国际公开赛”中喜获佳绩5月26日至29日,2017中国工程机器人大赛暨国际公开赛在中国矿业大学隆重举行。
2017机器人大赛比赛规则

2017中国机器人大赛比赛规则武术擂台赛项目轻量组项目2017中国机器人大赛武术擂台赛项目技术委员会2017年5月31日2017中国机器人大赛比赛规则目录一、项目简介 (1)二、技术委员会 (1)三、赛项说明 (1)四、比赛场地及器材 (4)五、机器人要求 (5)六、评分标准 (6)七、赛程赛制 (7)2017中国机器人大赛比赛规则一、项目简介轻量组将类人机器人应用到比赛中来,比赛中鼓励机器人将对方击倒,给一定时间让倒下的一方站立,单纯的推挤很难在比赛中占到优势,让比赛有格斗的特性,很有观赏性。
比赛内容:机器人自主从斜坡登上15cm高的比赛场地,寻找对手并将对手打倒或者推下擂台,在此过程中,如机器人倒下,可以自行站立继续比赛;被推下擂台,重新从斜坡出发比赛。
研究重点:自身定位,击倒对手。
技术难点:机器人在做好自身定位的同时如何有效的击倒对方机器人,在自身倒下的时候如何重新站立继续比赛。
二、技术委员会负责人:胡涛,北京博创尚和科技有限公司,********************,186****8855成员:卢涌,解放军理工大学刘保军,电子科技大学中山学院杨学军,太原理工大学王之仓,青海师范大学三、赛项说明参赛队伍限制:参赛队伍报名要求由大赛组委会统一发布报名须知。
2017中国机器人大赛比赛规则如同一单位有两支或两支以上队伍参加同一组别,则各支队伍机器人的参赛方案不能完全相同(在赛前资格认证时向裁判说明)。
机器人参赛资格认证:各参赛队机器人在参加的每场比赛前进行检录,该场比赛结束后可拿回充电调试。
资格认证内容包括各组别进行重量和尺寸和相应规则条款的检查。
裁判安排:每场比赛设1名主裁判,1名助理裁判(记分员)。
争议判罚:主裁判现场做出裁决。
抽签分组:原则上由各队报名表上的指导老师在赛前抽签确定分组与赛程。
如指导老师缺席,非特殊情况下,视为弃权,其他人不能替代。
比赛分组及对阵方法:比赛分为小组赛和淘汰赛,赛前领队会议时以抽签方式进行小组赛的分组。
机器人竞技工程(双足竞步、自由体操、仿人竞速等)规则-中国机器人大赛暨RoboCup公开赛-场地制作

机器人竞技工程(双足竞步、自由体操、仿人竞速等)规则-中国机器人大赛暨RoboCup公开赛-场地制作————————————————————————————————作者:————————————————————————————————日期:2014中国机器人大赛暨RoboCup公开赛2014中国工程机器人大赛(Robot at Work)机器人竞技工程(联系人:李汉军)四种比赛场地的需求数量1.“竞步窄足赛、竞步交叉足赛”场地(Ⅰ)2.“竞技体操赛”场地(Ⅱ)3.“竞技跳远赛”场地(Ⅲ)4.“竞速标准赛、障碍赛、创意赛”场地(Ⅳ)序号比赛项目场地名称场地数量备注1竞步窄足赛场地(Ⅰ) 4 竞步交叉足赛2 竞技体操赛场地(Ⅱ) 23 竞速标准赛场地(Ⅲ) 24 竞速标准赛场地(Ⅳ) 2 竞速障碍赛竞速创意赛比赛现场需要准备的器材、物品、志愿者数量序号名称窄足/交叉足用量体操赛用量跳远赛用量竞速赛用量合计说明1 比赛场地 42 2 2 10 制作要求详见“场地制作”2 学生课桌16 16 16 16 64每个场地提供4套3 橙子16 16 16 16 644 电源插座8 4 4 4 20 每个场地附近提供2个5 绝缘胶带8 8 8 8 32 16mm宽黑色防水电工绝缘胶带6 数字式秒表 6 3 3 6 187 手持扩音器 2 1 1 2 68 学生志愿者8 4 4 8 24 每个执行比赛的场地提供4人一、“竞步窄足赛、竞步交叉足赛”场地[场地(Ⅰ)]场地数量比赛现场提供4个场地。
场地制作规定(该表给出的是制作1个场地所需的材料)场地(Ⅰ) 图纸图1 大学组比赛区域(2000mm ×600mm )图2 青少年组比赛区域(2000mm ×700mm )场地尺寸 1. 场地为长方形(1张白色实木颗粒板),长×宽为2440mm ×1220mm 。
2. 比赛区域为长方形,由边线、起跑线和终点线构成,详见场地(Ⅰ)图纸。
机器人比赛项目具体介绍
1、RoboCup足球机器人仿真组(2D 3D)仿真组比赛类似FIFA系列足球游戏,由程序自主控制,完全模拟真人比赛, 比赛的方式是由Robocup委员会提供标准的Soccerserver系统,各参赛队编写各自的CLIENT程序,模拟实际足球队员参加比赛。
Soccerserver是一个允许竞赛者使用各种程序语言进行仿真足球比赛的系统。
一个机器人是Age nt,拥有自己的大脑,是一个独立的"主体"。
而一个球队实际是程序组成的。
服务器的工作就是计算并更新球场上所有物体的位置和运动,发送视觉和听觉信息给球员,接Server,即Soccerserver ,提供了一个虚拟场地,并对比赛双方的全部队员和足球的移动进行仿真。
Client,相当于球员的大脑,指挥球员的运动。
Server和Client之间的通信是通过UDP/IP 协议进行的。
可设定阵型、战术、体力消耗等一系列参数,比赛上下半场各5分钟,由电脑裁判进行在线裁定。
三维仿真与二维仿真相比,实现了对空间的模拟实战,使比赛更加激烈,更具观赏性。
2、RoboCup足球机器人中型组中型组是由两支各有4个机器人的球队在5X 10米的场地上进行的比赛,每个机器人的尺寸小于50 X 50 X 80cm。
所有的机器人是全自主的,所有的传感器都由机器人自身携带,机器人能使用无线网络与队友、场外Coach机进行通讯。
除了机器人上下场外,不允许人类对比赛进行额外的干预。
因此机器人是全分布式的和全自主的,机器人需要能够完全自主的通过传感器信息完成目标识别和自定位,决定自身采取的动作,控制电机和其它执行机构以完成比赛。
每场比赛分成两个15分钟的半场。
比赛过程由人类裁判控制,裁判具有绝对的权威贯彻比赛规则的执行。
同时有一个助理裁判负责操作裁判盒程序,根据主裁判的判罚发出相应的指令如比赛开始、暂停、开球、任意球等给比赛双方球队的场外Coach机,场外Coach机再将指令通过无线网络发送给场上比赛的机器人。
竞赛用双足直立机器人的设计及制作

总756期第二十二期2021年8月河南科技Journal of Henan Science and Technology收稿日期:2021-07-03基金项目:江汉大学大学生科研项目(国家级)“基于双足直立机器人的结构研究及制作”(202011072026)。
作者简介:鲍威尔(2000—),男,本科生,研究方向:机械设计制造及其自动化。
通信作者:朱雪明(1984—),男,硕士,实验师,研究方向:数控技术及先进制造技术。
E-amil :***************。
竞赛用双足直立机器人的设计及制作鲍威尔1朱雪明1,2张勇勇1王春1(1.江汉大学智能制造学院,湖北武汉430000;2.江汉大学大学工程训练中心,湖北武汉430000)摘要:以双足竞步机器人舵机的联动控制为基础,在研究人类行走、翻跟斗、立正等动作时每个关节所摆动的角度后,结合SolidWorks 运动仿真分析对机器人的行走步态进行简单规划,最终设计开发了一种结构模型,并以此为基础进行调试,分别设计出能够实现站立、行走、翻滚等一系列仿人形动作的程序,后将设计好的程序应用于实验样机,检验验证了程序设计的可行性和合理性。
关键词:双足步行机器人;SolidWorks 仿真分析;步态规划中图分类号:TP242文献标识码:A 文章编号:1003-5168(2021)22-0009-04Design Analysis and Fabrication of Bipedal Upright Robot for CompetitionBAO Weier 1ZHU Xueming 1,2ZHANG Yongyong 1WANG Chun 1(1.School of Intelligent Manufacturing,Jianghan University ,Wuhan Hubei 430000;2.Engineering Training Center,JianghanUniversity ,Wuhan Hubei 430000)Abstract:Based on the linkage control of the biped racing robot's steering gear,after studying the swing angle of each joint during human walking,heeling,standing up and other actions,this paper combines Solidworks motion sim⁃ulation analysis to make a simple plan for the robot's walking gait.In the end,a structural model is designed and de⁃veloped,and debugging is carried out on this basis,and a series of humanoid action programs that can realize stand⁃ing,walking,rolling,etc.are designed respectively,and the designed programs are run in the experimental prototype to verify the feasibility and rationality of the program design.Keywords:biped walking robot ;SolidWorks simulation analysis ;gait planning 随着人工智能与控制技术的快速发展,越来越多的仿人形机器人在各个领域发挥作用。
双足竞步机器人比赛规则
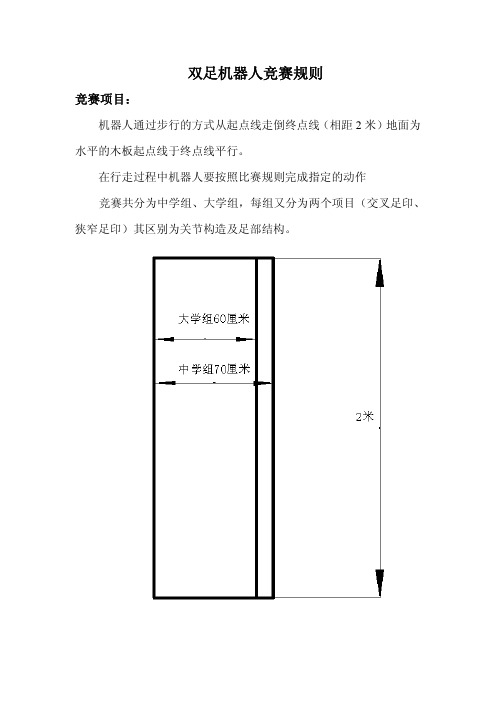
双足机器人竞赛规则竞赛项目:机器人通过步行的方式从起点线走倒终点线(相距2米)地面为水平的木板起点线于终点线平行。
在行走过程中机器人要按照比赛规则完成指定的动作竞赛共分为中学组、大学组,每组又分为两个项目(交叉足印、狭窄足印)其区别为关节构造及足部结构。
机器人结构及其规格的设定:交叉足印竞步机器人:结构只有双足、并只能以走路的方式来移动,机器人要分清楚正面及背面,以箭头方向作为正面,是自主式脱线控制,用不多于6只伺服马达及伺服马达控制板来完成,最大尺寸为200mm(长)X 200mm(宽)X 300mm(高),最大重量不超过1Kg。
狭窄足印竞步机器人:结构只有双足、并只能以走路的方式来移动,机器人要分清楚正面及背面,以箭头方向作为正面,是自主式脱线控制,用不多于6只伺服马达及伺服马达控制板来完成,最大尺寸为200mm(长)X 200mm(宽)X 300mm(高),最大重量不超过1Kg.,狭窄足印竞步机器人, 单足最大尺寸要能放入(长)150mm X (宽)60mm长方格内。
要求:对于大学组的机器人必须自主设计制造。
竞赛内容:交叉足印竞步机器人:大学组:竞赛开始时先走3步、立正、然后卧下、向前翻跟斗3次,再起立、向前走3步、立正、然后卧下(身体向后)、再向后翻跟斗3次、再起立、然后以轻快步履走向终点,参赛者要在指定3分钟或少于指定时间内完成所有动作,及要走到终点。
中学组:竞赛开始时先走3步、立正、然后卧下、向前翻跟斗3次,再起立、向前走3步、立正、然后卧下(身体向前),向前翻跟斗3次,再起立、然后以轻快步履走向终点,参赛者要在指定5分钟或少于指定时间内完成所有动作,及要走到终点。
狭窄足印竞步机器人:大学组:竞赛开始时先走3步、立正、然后卧下(身体向前)、向前翻跟斗3次,再起立、向前走3步、立正、然后卧下(身体向后)、再向后翻跟斗2次、再起立、然后以轻快步履走向终点、参赛者要在指定5分钟或少于指定时间内完成所有动作,及要走到终点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2017中国工程机器人大赛暨国际公开赛(RoboWork)双足竞步项目交叉足赛技术报告参赛学校:菏泽学院队伍名称:天泽队参赛队员:隋浩祝远波商滕伟带队教师:周景雷二〇一七年五月摘要机器人技术代表了机电一体化的最高成就,是二十世纪人类最伟大的成果之一,其中双足步行机器人因其体积相对较小,对非结构性环境具有较好的适应性,避障能力强,移动盲区很小等优良的品质,越来越受到人们的关注,因此对其控制研究和步态规划具有相当的现实意义。
本文的主要介绍了双足竞步机器人的国内外发展情况,以及PWM指令算法和舵机的联动控制,通过认真的研究人类行走方式以及翻跟斗的动作,对机器人的行走步态进行简单的规划,设计出简化结构模型,然后以此为基础进行了适当的调整,设计出符合交叉足竞步机器人比赛要求的全部动作程序,设计完成后将程序下载到实验样机中,验证程序设计的可行性和合理性,通过反复的修改和验证使得机器人能顺利的完成比赛任务。
关键词:双足步行机器人;步态规划;PWM控制ABSTRACTRobotic technology represents the electromechanical integration the greatestachievement of the 20th century, is one of the great achievement of human beings, the biped robot robot even though only the history of nearly 40 years, but because of its unique adaptability and human nature, became the robot to an important developing direction offield.Topics which aims to design a bipedal humanoid robot platform, based on the bipedal robot, walking gait for better finish tasks matting.Because of multi-joint robot has feet, drive and multisensor characteristics, andgenerally have redundant freedom, these features to its control problem has brought great difficulty, but also for various control and optimization method provides an ideal experimental platform, make its attracted many scholars eyes, become a blockbuster research direction, and so the biped robot gait planning and control study not only has high academic value, but also has quite practical significance.Based on the study of human walking style process and simplify the process after walking with a simplified model, to realize the steering gear PWM robot is effectively controlled.The paper mainly discussed the dynamic walking planning, design and simulation, detailed research using PWM control technology to achieve the linkage of the steering gear control more than.Keywords:Biped robot;Gait planning;PWM control目录第一章引言/综述 (5)第二章系统整体设计 (5)2.1 机器人的简述 (5)2.2 机器人的组成 (5)2.3 双足机器人的主要研究 (5)第三章机械结构设计 (6)3.1结构简介 (6)3.2动力源的选择 (6)3.3机构具体设计 (6)3.4躯干机构设计 (7)3.5机载安装空间设计 (7)第四章硬件设计 (9)4.1支架 (9)4.1.1支架参数 (9)4.1.2支架特点 (9)4.2舵机 (9)4.2.1舵机特点 (9)4.2.2舵机参数 (9)4.3锂电池 (10)4.4舵机控制板 (10)4.4.1 STM32F103的结构与功能 (10)4.4.2参数 (11)第五章软件设计 (14)5.1上位机软件 (14)5.1.1全局操作窗口 (14)5.1.2偏差操作窗口 (14)5.1.3舵机滑块功能介绍 (15)5.1.4动作数据显示区 (15)5.1.5动作编写及在线调试窗口 (16)5.1.6文件操作窗口 (17)5.2舵机调试 (17)第六章系统开发与调试 (17)第七章结论 (18)参考文献............................................ . (19)致谢 (19)第一章引言/综述交叉足机器人是目前机器人研究的主要方向,我们通过计算机器人的质量.舵机角度.自由度等,来调整步幅和步速,本次采用的是STM32F103RBT6单片机作为双足机器人的主核心控制单元,采用了4个180°舵机和2个270°舵机,使其完成走步,前翻,后翻等动作。
机器人自主的完成一系列动作走过赛道,其实现的主要动作有(向前走五步,前翻五个跟斗,然后再向前走五步,后翻五个跟斗,最后一直走向终点)研究的主要有舵机的控制和角度的输出控制,STM32F103RBT6单片机的编程能力,机器人的步态规划和设计。
研究的过程主要有舵机角度的计算,PWM输出与角度的对应关系,STM32F103RBT6编程的学习与实际应用,程序的修改与完善等几个步骤。
机器人是作为现代高新技术的重要象征和发展结果,已经广泛应用于国民生产的各个领域,并正在给人类传统的生产模式带来革命性的变化,影响着人们生活的方方面面。
在研究和开发及不确定环境下作业的机器人的过程中,人们逐步认识到机器人技术的本质是感知、决策、行动和交互技术的结合。
随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领域渗透。
结合这些领域的应用特点,人们发展了各式各样的具有感知、决策、行动和交互能力的特种机器人和各种智能机器,如移动机器人、微机器人、水下机器人、医疗机器人、军用机器人、空中空间机器人、娱乐机器人等。
机器人技术是一门综合了传感与检测、运动控制、图形图像处理等技术的新型学科,它融合了机械、电子、传感器、计算机硬件、软件、人工智能等许多学科的知识,涉及到当前许多前沿领域的技术。
随着电子技术的飞速发展,智能机器人在越来越多的领域发挥着人类无法代替的作用。
机器人能力的评价标准包括:智能,指感觉和感知,包括记忆、运算、比较、鉴别、判断、决策、学习和逻辑推理等;机能,指变通性、通用性或空间占有性等;物理能,指力、速度、连续运行能力、可靠性、联用性、寿命等。
因此,可以说机器人是具有生物功能的三维空间坐标机器。
第二章系统整体设计2.1 机器人的简述国外双足机器人的研究早在上世纪80年代就已形成热潮,并且提出了许多系统的建模及控制的理论和方法,因此机器人成为作为现代高薪技术的重要象征和发展的结果。
现在机器人的应用已经开始在各个行业出现,并且正在给人类的传统生产和生活模式带来革命性的变化。
在人类的不断努力下,人类终于认识到了机器人技术的本质是感知,决策,行动和交互。
因此人类不断的向其中渗透,并结合其特点设计了各式各样的智能机器人,如灭火机器人,医疗机器人,分类机器人,水下机器人,军用机器人,娱乐机器人,宣传介绍机器人等。
现在的先进智能机器人已经结合了传感与检测技术,人机交互技术,学习能力,感情识别能力等一系列的类人能力。
他融合了机械,电子,传感器,计算机,人工智能的学科知识,涉及到了许多的前沿技术。
如今的机器人有如下的功能:感知,智能,记忆,运算,比较,判断,学习,可靠性,寿命长等。
2.2 机器人的组成两个270°舵机,四个180°舵机,一块2200STM32F103RBT6主控。
2.3 双足机器人的主要研究本次机器人主要运用STM32F103RBT6主控,使机器人具备自主决策和自主判断能力,使用四个180°舵机和两个270°舵机作为关节驱动舵机行走,使用PWM信号来控制舵机完成相应动作,主要动作有:从起点到终点(先向前走五步,向前翻五个跟头,然后向前走五步,向后翻五个跟头,最后徒步走向终点)。
第三章机械结构设计3.1结构简介交叉足机器人机构设计中关节轴系的结构设计必须紧凑,传动精度高,效率高,并保证提供必要的输出力矩和输出速度,以满足机构动态步行运动速度和承载能力。
在上述机构的总体设计方案制定后,我们对机构中关键器件进行了选型,主要包括轴系电机、传动杆件等,为此我们根据轴系对运动实现的重要性把机器人所有轴系分为两类:主要轴系和次要轴系。
主要轴系包括下肢所有轴系,它们涉及交叉足机器人基本运动功能的实现问题,因此是本项目机构设计的核心问题,其基本元件和结构方式必须首先确定下来才能展开以此为核心的机构设计和机加工工作。
3.2动力源的选择舵机是一种最早应用在航模运动中的动力装置,是一种微型伺服马达,它的控制信号是一个宽度可调的方波脉冲信号,所以很方便和模拟系统进行接口。
只要能产生标准的控制信号的模拟设备都可以用来控制舵机,比如PLC、单片机和DSP等。
而且舵机体积紧凑、便于安装、输出力矩大、稳定性好、控制简单。
目前市场上,有很多种电动机向机器人提供能源:直流电机、交流电机、步进电机、伺服电动机。
由于交叉足交叉足机器人要求的精度要求比较高,而交直流电机通电就转,断电就停,比较难进行机器人的位置控制;步进电机虽能按一定的精度工作,但它本身是一个开环系统,精度达不到要求。
因此,我们选择使用伺服电动机。
舵机最早出现在航模运动中。
在航空模型中,飞行机的飞行姿态是通过调节发动机和各个控制舵面来实现的。