可靠性原理_孙有朝_第三章可修复系统的可靠性
以可靠性为中心的维修_RCM_维修科学的发展趋势

以可靠性为中心的维修(RCM )—维修科学的发展趋势3南京航空航天大学 (210016) 孙有朝 樊蔚勋 摘 要 分析了维修科学的发展历程,指出了RCM 的基本问题和主要研究内容,阐述了RCM 将成为维修科学的重要发展方向。
关键词 可靠性 预防维修 设备管理 维修计划 RCM 3获“民航总局自选科研课题基金”资助1 维修观念的更新众所周知,机械设备正向复杂、成套、自控和机电一体化方向发展,在实际运行中,为了保持设备在设计中原有的可靠性和稳定性,设备管理和维修工程已成为系统工程的一个重要分支。
七十年代至今,是维修观念和技术迅速发展、维修由被动排除故障变为主动预防并发展成为一门科学的重要时期。
这一时期对维修的期望值有了较大提高,通过维修要求达到更高的设备可用度和可靠性、更高的安全性、更高的产品质量、更长的设备寿命、更高的成本效益、对环境无危害等等,由此可见,可靠性和可用度已成为关键性因素。
除了提高期望值外,人们对设备工龄期与故障的很多基本看法也发生了重大变化,尤其是大多数复杂设备的运行工龄与设备发生故障可能性之间的联系很明显越来越少(早期的故障观点比较简单,认为设备越陈旧越可能发生故障,人们对“强化试验”的深入认识,逐渐形成了“浴盆”曲线的观点,但根据近期的研究表明,由于具体设备的状态不同,故障模型可达六种之多),同时,还发展了许多新技术(如决策支持手段、状态监测技术等),更加注重了设备的可靠性和可维修性设计,组织中的主要方法朝参与、合作、灵活的方向转变,当今的维修管理人员所面临的主要挑战,不仅是要学习这些新技术,而且要能决定是否值得做,正确的选择是改善设备性能、降低维修费用的关键。
2 以可靠性为中心的维修(RCM)以可靠性为中心的维修(Reliability -Centered 2Maintenance )是近二十年来从众多的维修理论中脱颖而出并逐步被广泛接受的一种全新的维修方法,它是建立在设备的设计特点、运行功能、失效模式和后果分析的基础上,以最大限度提高设备的使用可靠性为目的,应用可得到的安全性和可靠性数据,判别哪些子系统和零部件处于临界状态,哪些需要修复、改进或重新设计,确定维修的必要性和可行性,对维修要求进行评估,最终制订出实用、合理的维修计划或大纲。
第三章 系统的可靠性分析
第三章系统的可靠性分析所谓系统,是为了完成某一特定功能,由若干个彼此有联系而且又能相互协调工作的单元所组成的综合体。
系统可以是机器、设备、部件和零件;单元也可以是机器、设备、部件和零件。
系统和单元的含义是相对而言的,由研究的对象而定。
系统可以分为可修复系统与不可修复系统两类。
所谓不可修复系统,是指系统或其组成单元一旦发生失效,不再修复,系统处于报废状态,这样的系统称为不可修复系统。
不可修复是指技术上不能够修复,经济上不值得修复,或者一次性使用,不必要进行修复。
绝大多数设备是可修复系统,但不可修复系统的分析方法是研究可修复系统的基础。
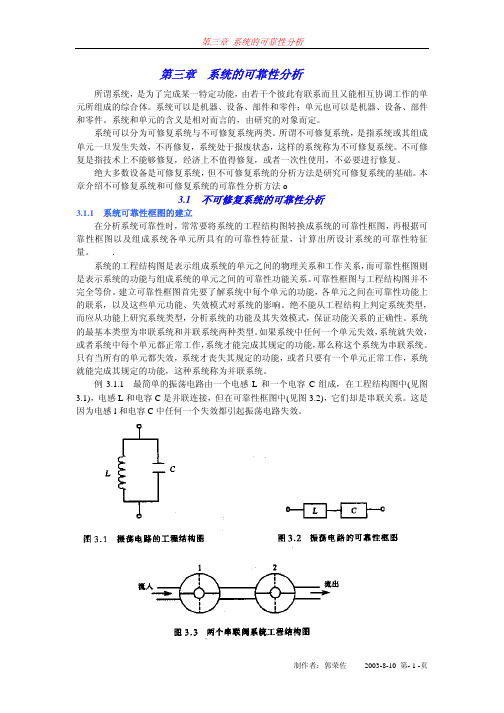
本章介绍不可修复系统和可修复系统的可靠性分析方法o3.1 不可修复系统的可靠性分析3.1.1 系统可靠性框图的建立在分析系统可靠性时,常常要将系统的工程结构图转换成系统的可靠性框图,再根据可靠性框图以及组成系统各单元所具有的可靠性特征量,计算出所设计系统的可靠性特征量。
.系统的工程结构图是表示组成系统的单元之间的物理关系和工作关系,而可靠性框图则是表示系统的功能与组成系统的单元之间的可靠性功能关系。
可靠性框图与工程结构图并不完全等价。
建立可靠性框图首先要了解系统中每个单元的功能,各单元之间在可靠性功能上的联系,以及这些单元功能、失效模式对系统的影响。
绝不能从工程结构上判定系统类型,而应从功能上研究系统类型,分析系统的功能及其失效模式,保证功能关系的正确性。
系统的最基本类型为串联系统和并联系统两种类型。
如果系统中任何一个单元失效,系统就失效,或者系统中每个单元都正常工作,系统才能完成其规定的功能,那么称这个系统为串联系统。
只有当所有的单元都失效,系统才丧失其规定的功能,或者只要有一个单元正常工作,系统就能完成其规定的功能,这种系统称为并联系统。
例3.1.1 最简单的振荡电路由一个电感L和一个电容C组成,在工程结构图中(见图3.1),电感L和电容C是并联连接,但在可靠性框图中(见图3.2),它们却是串联关系。
第三章_可修复系统的可靠性

结论: (1)随着转移步数的增加,状态趋于稳定。 稳定状态的概率称为极限概率。
(2)当n趋于无穷大时,n步转移矩阵Pn将 收敛于一个概率矩阵。
可 靠 性 设 计
P
n
4 9 4 9
5 9 5 9
(3)稳定状态极限概率于初始状态无关。 如果初始状态为
转移步数 0 1 0.4 0.6
P1 t P X t 1 P2 t P X t 0
表示系统处 于正常状态
可 靠 性 设 计
表示系统 处于故障 状态
△t时间内各转移概率为:
P1 1 t P X t t 1 X t 1 1 t 0 t P1 2 t P X t t 0 X t 1 t 0 t P2 1 t P X t t 1 X t 0 t 0 t P2 2 t P X t t 0 X t 0 1 t 0 t
二、转移矩阵
有一台机器,运行到某一时刻t时,可能有的状态 有e1(正常运行)及e2(发生故障)。
假设处于e1状态的概率为4/5,维修度为3/5。则: 处于e1状态的概率:
P1 1 R ( t ) 4 5
可 靠 性 设 计
由e1向e2转移的概率: P1 2 由e2向e1转移的概率: P2 1 处于e2状态的概率: P2 2
状态转移: 转移概率:
描述系统的变量从一个状态的特定值变 化到另一个状态的特定值,则说系统实 现了状态的转移。 由一种状态向另一种状态转移是随机的,
是以一定的概率来实现的,此概率称为转移概率。
部件有优先权且修理工可对外服务的可修系统可靠性分析

摘要摘要可修系统的可靠性分析是可靠性研究中重要的内容之一,在可修模型中,表决系统和冷储备可修系统是非常重要的两个模型。
论文在参考文献的基础上,推广了这两个可修模型,得到了系统的可靠性指标。
论文首先研究了两个系统,带有优先权且仅有一部件可修复如新的线形()GC:2,3可修系统和修理工可对外服务的冷储备可修系统。
(1)在线形()GC:2,3系统中故障部件修理情形不同,其中两部件故障后是不能修复如新的,而另一个可以修复如新,以及关键部件具有优先维修权;(2)在由两同型部件组成的冷储备可修系统中,每个部件失效分布、顾客的到达间隔时间分布为指数分布,其余分布均为一般连续型分布;在这些假设条件下,利用补充变量法和拉普拉斯变换工具,得到了这两个系统的可用度,可靠度等主要可靠性指标的Laplace变换表达式。
在以上论文的基础上,又研究了由两不同型部件组成的冷储备系统,其中一个部件不能修复如新,另一部件具有工作优先权;在此基础上又将修理优先权和使用优先权两个条件同时引入到由两不同型部件组成的冷储备可修系统中,研究了部件具有优先权且修理工可对外服务的冷储备可修系统,其中部件的寿命分布服从指数分布,部件的修理时间和修理工在系统外工作时间服从一般连续分布,在这些假设条件下利用补充变量法,广义马尔可夫过程方法和概率与统计方法得到了系统的可靠性指标和系统等待修理的概率和修理工在系统外工作的概率。
关键词可修系统;可靠性;补充变量法;广义马尔可夫过程;拉普拉斯变换;可用度;优先权大学理学硕士学位论文AbstractReliability of repairable system is very important in the research of reliability. The voting repairable system and cold standby repairable system are the two of the most important repairable systems. On the base of the existing research harvest of repairable system, the paper has extended some system reliability of repairable models.Firstly, this paper discusses a repairable linear ()GC:2,3system and cold standby repairable system with a repairman doing other work. Under the condition of different repairment, it is assumed that one component after repair is as good as new, otherwise the others after repair is not as good as new in C:2,3system. The cold standby system is formed by two same linear ()Gcomponents. It is assumed that the working time of each component and the arrival interval time distributions of the customers are to be exponential distributions, the others are to be general continuous distributions in the system. By using supplementary variable method, the general Markov process method and the tool of the Laplace transform, several reliability indices of this model was obtained: the availability, the stead-state failure frequency and so on.Based on these papers, this paper discusses cold standby repairable system which is formed by two different components, It is assumed one component after repair is not as good as new, we discussed cold standby system with using priority. We further discussed the cold standby repairable system with using priority, repairing priority and the repairman doing other work. The system is formed by two different components. It is assumed that the lifetime distributions of components are all exponentially distributed, and the repair time of components and the work time of the repairman outside the system are all generally distributed. Using Probability Theory and the method of Laplace transformation theory, we obtain the reliability indexes of this system.大学理学硕士学位论文Keywords Repairable system; Reliablity; Supplementary variable method;Generalized Markov progress; Laplace-transform; Availability;Priority第1章绪论第1章绪论1.1 可靠性数学理论的背景可靠性是为适应产品的高可靠要求而发展起来的新兴学科,是一门综合了概率统计、系统工程、质量控制、生产管理等众多学科的边缘学科。
可靠性工程讲义三章(与“系统”有关文档共93张)
输入节点:系统功能流程的起点。
输出节点:系统功能流程的终点。
中间节点
第5页,共93页。
可靠性逻辑框图按级展开
系统级 分系统级 设备级
部件级 组件级
5
1
234
abcde
Ⅵ
ⅢⅣ
ⅠⅡ
Ⅶ
Ⅴ
Ⅷ
X
D
LCR
X
D
ⅰⅱⅲⅳ
第6页,共93页。
第7页,共93页。
MTBF
第45页,共93页。
MTBF
第46页,共93页。
热贮备和温贮备系统的可靠性模型
• 温储备系统的储备单元处于轻载工作状态,不处 于完全不工作状态,例如,电子管的灯丝。
• 当设备处于比较恶劣的环境时,不工作储备单元 的故障率要比轻载的故障率大得多,这时也必须 使储备单元处于轻载工作状态。例如,处于潮湿 环境中的电子设备,通电工作的故障率要比长期 储存(不工作)的失效率低。
• 可靠性框图——是在完全了解产品任务 和寿命周期模型的基础上,通过简明扼 要的直观办法表示出产品每次使用能成 功地完成任务时,所有单元之间的相互 依赖关系。
第4页,共93页。
• 为预计和估算产品可靠性所建立的可靠性方框图和 数学模型。
• 方框:产品或功能
• 逻辑关系:功能布局 • 连线:系统功能流程的方向
R1
R1
R1
由此可见, 2/3[G]方法采用3台发动机其 可靠度接近4台发动机的可靠度,故该法
是既节省资源有提高可靠度的合理方法之一。
第42页,共93页。
3.2.5 贮备系统
第43页,共93页。
分 冷贮备系统 类 热/温贮备系统
系统可靠性原理(全部)
第2章 元件可靠性分析
1 元件的基本概念
元件 在可靠性统计、检验和分析中不需要再细分 的部件或部件组合。元件应有独立的功能 元件分为有效和失效两状态(可能有多个状态) 可修复元件 如果元件使用一段时间后发生故障, 经过修理能够恢复到原来的工作状态 不可修复元件 如果元件使用一段时间后发生故障, 不能修复或虽能修复,但很不经济 元件的可靠性指标包括:故障分布函数、故障密 度函数、可靠度函数、平均无故障工作时间、故 障率函数
委内瑞拉大停电 2008年4月29日16时15分发生大规模停电, 包括首都加拉加斯在内的全国一半地区受到停 电影响。加拉加斯以及委内瑞拉中部、西部13 个州的全部或部分地区受到影响。停电后,加拉 加斯地铁全线瘫痪,缺少了红绿灯的地面交通变 得混乱不堪。
3 电力系统可靠性
• 电力系统可靠性是可靠性理论在电力系统中的 应用 • 电力系统可靠性是指电力系统按可接受的质量 标准和所需数量不间断地向电力用户供应电力 和电能量的能力 • 电力系统可靠性包括充裕度和安全性两个方面 • 充裕度是在静态条件下电力系统满足用户电力 和电能量的能力 • 安全性是在动态条件下电力系统经受住突然扰 动并不间断地向用户提供电力和电能量的能力
3电力系统可靠性?电力系统可靠性是可靠性理论在电力系统中的应用可靠性理论在电力系统中的应用?电力系统可靠性是指电力系统按可接受的质量标准和所需数量不间断地向电力用户供应电力和电能量的能力向电力用户供应电力和电能量的能力充和安两?电力系统可靠性包括充裕度和安全性两个方面?充裕度是在静态条件下电力系统满足用户电力和电能量的能力条件下电力系统满足用户电力和电能量的能力?安全性是在动态条件下电力系统经受住突然扰动并不间断地向用户提供电力和电能量的能力条件下电力系统经受住突然扰动并不间断地向用户提供电力和电能量的能力31研究内容第一层发电系统可靠性评估第二层层发输电系统可靠性评估输电系统可靠性评估层第层发输电系统可靠性评估第三层电力系统可靠性配电系统可靠性评估发电厂变电所电气主接线可靠性评估发电厂变电所电气主接线可靠性评估?研究如何用统计的方法获得元件的可靠性指标研究如何用统计的方法获得元件的可靠性指标?研究如何构成各个环节的可靠性数学模型?寻找提高电力系统可靠性的途径和方法32电力系统可靠性的任务?研究可靠性和经济性的最佳搭配课程内容?系统可靠性基本概念?不可修复系统可靠性分析方法?可修复系统可靠性评估方法?状态空间分析法?共模故障的分析?频率与持续时间法?考虑两态天气情况下的马尔可夫过程参考书目?李群湛
可靠性理论基础复习资料

可靠性理论基础复习资料目 录 第一章 绪论第二章 可靠性特征量第三章 简单不可修系统可靠性分析 第四章 复杂不可修系统可靠性分析 第五章 故障树分析法第六章 三态系统可靠性分析 第七章 可靠性预计与分配第八章 寿命试验及其数据分析第九章 马尔可夫型可修系统的可靠性第一章:可靠性特征量 2.1 可靠度 2.2 失效特征量 2.3 可靠性寿命特征 2.4 失效率曲线 2.5 常用概率分布 2.1 可靠度一、系统的分类:可修系统与不可修系统;可修系统是指系统的组成单元发生故障后,经过维修能够使系统恢复到正常工作状态。
不可修系统是指系统或其组成单元一旦发生失效,不在修复,系统处于报废状态。
二、可靠性定义产品在规定条件下,规定时间内,完成规定功能的能力。
1. 产品:可以是一个小零件,也可以指一个大系统。
2. 规定条件:主要是指使用条件和环境条件。
3. 规定时间:包括产品的运行时间、飞机起落架的起飞着陆次数、循环次数或旋转次数等。
产品可靠性是非确定性的,并且具有概率性质和随机性质。
广义可靠性与狭义可靠性指可修复产品在使用中或者不发生故障(通过预防性维修),或者发生故障也易于维修,因而经常处于可用状态的能力。
广义可靠性 = 狭义可靠性 + 可维修性 广义可靠性典型事例:赛车可靠性的分类:固有可靠性和使用可靠性固有可靠性:通过设计、制造、管理等所形成的可靠性 (通常体现在产品的固有寿命上)使用可靠性:产品在使用条件影响下,保证固有可靠性的发挥与实现的功能。
(通常体现在产品的实际使用寿命上)使用条件:包括运输、保管、维修、操作和环境条件等。
例1:判断下面说法的正确性:所谓产品的失效,即产品丧失规定的功能。
对于可修复系统,失效也称为故障。
( √ ) 例2:可靠度R(t)具备以下那些性质?(BCD) A .R(t)为时间的递增函数 B .0≤R(t)≤1 C .R(0)=1 D .R(∞)=0若受试验的样品数是N 0个,到t 时刻未失效的有Ns(t)个;失效的有N f (t)个。
系统可靠性PPT课件

指数分布 正态分布 威布尔分布
et
1
e(t )2 / 2 2
2
tm
m t e m1 t0 t0
et
1
e dr (t )2 / 2 2
2 t
etm /t0
第11页/共36页
失效率λ(t)
e(t )2 / 2 2
e dr (t )2 / 2 2
t
m t m1 t0
1 系统可靠性的概念及指标
R(t) P{T t}
R(t) N0 r(t) N0
N0为产品总数,r(t)为工作到t时刻产品发生的故障数。
• 不可靠度 F(t)
F(t)=1-R(t)
第6页/共36页
F(t) r(t) N0
1 系统可靠性的概念及指标
1.3 可靠性的度量指标
例:对100个某种器件在相同条件下进行寿命试验,每工作100h测试一次,
特点:组成串联系统的单元越多,产品的可靠性第越14低页/。共36页
MTBF 1
s
1
n
i
i 1
2 系统可靠性模型
2.2串联系统可靠性模型
并联系统是最简单的冗余系统
70 工作状态
%
备用状态
并联模型:只有所有子系统都失效,系统才失效。
n个单元并联模型的不可靠度:
n
n
Fs (t) Fi (t) (1 Ri (t))
确定顶端事件
求确定分析目的及系统故障判据。
建立故障树
从顶端事件出发根据基本规则 和方法建造故障树。
定性分析
故障树的规范化;简化及模块
分解;计算故障树的最小割集。
定量分析
由各底事件发生概率计算出顶
写出分析报告,提出改进措施 事件的发生概率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.3 n步转移后系统各状态概率 步转移后系统各状态概率
例:求如图所示系统的平稳状态概率。
3.3 n步转移后系统各状态概率 步转移后系统各状态概率
解:一步转移矩阵为:
设P(n)=[ P0 P1],则
[P0
]⋅ P1
1 − λ∆t λ∆t = [P0 P1] 1 − µ∆t µ∆t
3.1 马尔可夫过程
马尔可夫过程定义
马尔可夫过程是一类“后效性”的随机过程。 简单地说,在这种过程中系统将来的状态只与现 在的状态有关,而与过去的状态无关。或者说, 若已知系统在t0时刻所处的状态,那么t> t0时的状 态仅与时刻t0的状态有关。
3.1 马尔可夫过程
马尔可夫过程的数学描述
设{x(t),t≥0}是取值在E={0,1,2,…}或E={0,1,2,…,N}上的一 个随机过程。若对任意n个时刻点0≤t1<t2<…<tn 均有: P{x(tn)=in|x(t1)=i1,x(t2)=i2,…,x(tn-1)=in-1} =P{x(tn)=in|x(tn-1)=in-1} i1,i2,…,in∈E
3.3 n步转移后系统各状态概率 步转移后系统各状态概率
设平稳状态概率为P(n)=[ P1, P2…Pn], P为一步 转移概率矩阵,则求平稳状态概率,只需求解以 下方程: 或写成:
P (n) ⋅ P = P (n)
P12 ⋯ P1n P22 ⋯ P2n = [P1 P2 ⋯ Pn] ⋯ ⋯ ⋯ ⋯ Pnn Pn2
P ( 3 ) = [0 . 445
0 . 555
]
P(5) = [0.44445 0.55555]
由此可知,随着n的递增,P1(n)、 P2(n)逐渐趋于稳定。稳定状态 概率称为极限概率。
3.3 n步转移后系统各状态概率 步转移后系统各状态概率
本例n→∞时的极限概率为P1(∞)=4/9, P2(∞)=5/9,即n→∞时, n 将收敛于一个定概率矩阵,即(本例为): P
3.2 状态转移图
由此可写出系统的转移矩阵为:
转移矩阵Pij也表示时间ei 发生的条件下,时间ej发生的 条件概率:Pij=P(ei|ej) ; 矩阵 P:列是起始状态,有小到大;行是到达状态,由 小到大排列,建立P时应与转移图联系起来。
3.2 状态转移图
例2
对于一可修系统,失效率和修复率为λ、µ为 常数,试画出状态转移图: e1——正常; e2——故障。
第三章
可修复系统的可靠性
孙有朝 南航大民航学院 2004年12月13日 年 月 日
第三章 可修复系统的可靠性
3.1 马尔可夫过程 3.2 状态转移图 3.3 n步转移后系统各状态概率 3.4 单部件可修系统 3.5 串联可修系统 3.6 并联可修系统
引言
可修复系统的组成单元发生故障后,经过修理 可以使系统恢复至正常工作状态,如下图所示。 如果工作时间和修复时间都服从指数分布,就可 以借助马尔可夫过程来描述。
—— 此即为 P0 (t + ∆t ) 的计算公式
3.4 单部件可修系统
由上式展开、移项、两边除以 若令 ∆t → 0 取极限有:
∆t
P0 (t + ∆t ) − P0 (t ) lim = −λP0 (t ) + µP (t ) 1 ∆t → 0 ∆t ⇒
P0′(t ) = −λP0 (t ) + µP (t ) 1
3.4 单部件可修系统
下边求解状态方程 对上述(1)、(2)两边取拉氏变换:
L[ P0′(t )] = −λL[ P0 (t )] + µL[ P (t )] 1 1 1 L[ P′(t )] = λL[ P0 (t )] − µL[ P (t )]
b)
c)
3.2 状态转移图
例1
如一台机器,运行到某一时刻t时,可能的状态为: e1-正常; e2-故障。如机器处于e1状态的概率P11=4/5, 则e1向e2转移的概率P12=1-P11=1/5;反过程,如机器处 于e2状态,经过一定时间的修复返回e1 状态的概率是3/5, P21=3/5(维修度M(τ));则修不好仍处于e2状态的概率是 P22=1-P21=2/5.
(1)
3.4 单部件可修系统
同理可得:
P (t + ∆t ) = λ∆tP0 (t ) + (1 − µ∆t ) P (t ) 1 1
P′(t ) = λP0 (t ) − µP (t ) 1 1
(1)、(2)联立即可求出 P0 (t )和P (t ) 1 。 (1)、(2)的联立方程称为状态方程 (2)
[P1
P2
P11 P21 ⋯ Pn] ⋅ ⋯ Pn1
3.3 n步转移后系统各状态概率 步转移后系统各状态概率
展开后得:
n =∑ P j i =1 Pi Pij n ∑Pj =1 j =1
(j=1,2,…n)
n个方程只有n-1个是独立的,因此必须再加另一个独 立方程)。 由此即可求出n个平稳状态概率。
P0 λ − P1 µ = 0 ⇒ P0 + P1 = 1
− P 0 λ + P1 µ = 0 ⇒ P 0 λ − P1 µ = 0
⇒ P0 =
µ λ+µ
P1 =
λ λ+µ
3.4 单部件可修系统
单部件系统是指一个单元组成的系统(或把整个系 统当作一个单元来研究),部件故障系统故障,部 件正常系统正常。
3.3 n步转移后系统各状态概率 步转移后系统各状态概率
如果转移矩阵P经过n次相乘后,所得矩阵的全部元素 ( 都大于0,即 Pijn ) > 0 (i,j∈E),(注:常以此为判断<来检查> 马尔可夫链是否为各态历经的或是否存在极限概率),则 这样的转移矩阵都是遍历矩阵。遍历矩阵一定存在极限概 率(或稳定状态)。 经过n步转移后的极限状态,就是过程的平稳状态,既 然如此,即使再多转移一步,状态概率也不会有变化,这 样可以求出平稳状态。
(n)
( = [ Pijn )] ,则
3.3 n步转移后系统各状态概率 步转移后系统各状态概率
一般地,可利用转移概率和系统的初始状态,求 出任意转移后系统各状态的概率。公式如下:
P(n) = P(0) ⋅ P n
式中
P-部转移概率; n P -n步转移概率; n-转移步数(次数); P(0)-系统初始状态向量, P(0)=[ P1(0), P2(0)…] Pi(0)-初始t=0时刻系统处于i状态的概率 P(n)-n步转移后系统所处状态向量,P(n)=[ P1(n), P2(n),…] Pi(n) -n步转移后刻系统处于i状态的概率
3.3 n步转移后系统各状态概率 步转移后系统各状态概率
例:如下图,已知P(0)=[P1(0), P2(0)]=[1, 0],求n=1,2,…等 各步(次)转移后系统各状态的概率。 图中e1——正常; e2——故障。
3.3 n步转移后系统各状态概率 步转移后系统各状态概率
解:依次求得 n=1, n=2, n=3n=5时的状态矩阵
( ) 上式中,若令k=1,l=1,由 Pij (i, j ∈ E ) 可决定 Pij2, 即由全部一步转移概率可确定全部两步转移概率。 若重复上述方法,就可由全部一步转移概率决定 所有的转移概率。
若用矩阵表示n步转移概率,即 P 有: (n) = P ( n ) = P k Pl P − − − 转移矩阵 P
同理:
条件概率
P = P (∆t ) = P{x(t + ∆t = 0) | x(t ) = 1} = µ∆t 10 10
P = P (∆t ) = P{x(t + ∆t = 1) | x(t ) = 1} = 1 − µ∆t 11 11
3.4 单部件可修系统
上图的转移概率矩阵为:
0 1 λ∆t (= P(∆t )) P = 0 1 − λ∆t µ∆t 1 − µ∆t 1
3.4 单部件可修系统
令
P0 (t ) = P{x(t ) = 0}、P1 (t ) = P{x(t ) = 1}
下面研究如何求解
P0 (t )和P (t ) 1
P0 (t + ∆t ) 和
首先,利用全概率公式可求出 P (t + ∆t ) 的表达式 1
3.4 单部件可修系统
P (t +∆t) = P{x(t +∆t) =0} 0 } } = P{x(t +∆t) = 0| x(t) =0}P{x(t) = 0}+ P{x(t +∆t) = 0| x(t) =1 P{x(t) =1 = P (∆t)⋅ P (t) +P (∆t)⋅ P(t) 00 0 10 1 = (1−λ∆t)P (t) +µ∆tP(t) 0 1
3.1 马尔可夫过程
三条假设
a)
λ,µ为常数(即寿命和维修时间服从指数分布)
b) c)
部件和系统取正常和故障两种状态。 在相当小的∆t内,发生两个或两个以上部件同 时进行状态转移的概率是∆t的高阶无穷小,此 概率可以忽略不计。
3.1 马尔可夫过程
可修复系统的可靠性特征量
a)
瞬态可用度A(t)、不可用度Q(t); 稳态可用度A、不可用度Q; MTBF、MTTFF(首次故障前平均时间)、MTTR(平均 修复时间) 。
10
ห้องสมุดไป่ตู้
3.4 单部件可修系统
单部件可修系统状态转移图
3.4 单部件可修系统
上图中:
P01 = P01 (∆t ) = P{x(t + ∆t = 1) | x(t ) = 0} = λ∆t
P00 = P00 (∆t ) = P{x(t + ∆t = 0) | x(t ) = 0} = 1 − λ∆t