第4章-根轨迹分析法-参考答案
夏德钤《自动控制原理》(第4版)章节题库-第4章线性系统的根轨迹分析【圣才出品】

夏德钤《⾃动控制原理》(第4版)章节题库-第4章线性系统的根轨迹分析【圣才出品】第4章 线性系统的根轨迹分析1.系统的开环传递函数试证明:点在根轨迹上,并求出相应的和系统开环增益K。
证明:根据系统的开环传递函数可知,系统的开环极点为由闭环根轨迹的相⾓条件可得:当时,故点在根轨迹上。
由闭环根轨迹的幅值条件可知,此时即相应的根轨迹增益和系统开环增益仿真曲线如图4-1所⽰。
MATLAB程序:exe402.m2.设单位反馈控制系统的开环传递函数为试⽤解析法绘出K*从零变到⽆穷时的闭环根轨迹图,并判断下列点是否在根轨迹上:(﹣2+j0),(0+j1),(﹣3+j2)解:闭环传递函数为则闭环特征⽅程为闭环特征根为当。
可逐个描点得闭环根轨迹如图4-2所⽰,从图4-2中明显可见,只有(-2,j0)在根轨迹上。
图4-23.设单位反馈控制系统的开环传递函数如下,试概略绘制闭环根轨迹图。
解:(1)系统的开环传递函数令为根轨迹增益。
①实轴上的根轨迹:[0,-2],[-5,-∞)。
②根轨迹的渐近线:③根轨迹的分离点:根轨迹的分离点坐标满⾜解得④根轨迹与虚轴的交点:由系统的开环传递函数可知系统的闭环特征⽅程令s=jω,将其代⼊上式可得即由于ω≠0,故可解得则根轨迹与虚轴的交点为±j3.16。
根据以上⼏点,可以画出概略根轨迹如图4-3所⽰。
图4-3 系统(1)概略根轨迹图(2)系统的开环传递函数①实轴上的根轨迹[0,-2],[-3,-5]。
③根轨迹的分离点:根轨迹的分离点坐标满⾜通过试凑可得d=-0.89。
根据以上⼏点,可以画出概略根轨迹如图4-4所⽰。
图4-4 系统(2)概略根轨迹图(3)系统的开环传递函数①实轴上的根轨迹:[-1,-3],[-10,-5]。
②根轨迹的渐近线:③根轨迹的分离点:根轨迹的分离点坐标满⾜通过试凑可得d=-7.27。
根据以上⼏点,可以画出概略根轨迹如图4-5所⽰。
图4-5 系统(3)概略根轨迹图(4)系统的开环传递函数实轴上的根轨迹为[-2,-1],系统概略根轨迹如图4-6所⽰。
自动控制原理_随堂练习_网络
第二章控制系统的教学模型........某典型环节的传递函数是,则该环节是(A. B. C. D.某系统的传递函数是,则该可看成由(系统在作用下的稳态误差,说明(.型别已知系统的开环传递函数为,则该系统的开环增益为.闭环极点为的系统.闭环特征方程为的系统.阶跃响应为的系统.脉冲响应为的系统.稳态误差计算的通用公式是若某负反馈控制系统的开环传递函数为,则该系统的闭环特征方程为.B..D曲线.最大超调量D系统渐近线与实轴正方向夹角为(、、、、已知单位反馈系统的开环传递函数为,则根据频率特性的物理意义,该闭环系统输入信号为时系统的稳态输出为(A. B.C. D.A. B.D.右半平面上的极点数,为系统的型别。
开环对视幅频特性低频段的斜率表征系统的类型,高度表征开环传递系数的大小C.中频段的斜率、宽度以及截止频率表征系统的动态性能若系统的开环不稳定,即开环传递函数在右半平面上的开环频率特性曲线及其镜像当从变化到时,若系统的开环不稳定,即开环传递函数在右半平面上的开环频率特性曲线及其镜像当A. B.C. D.对数幅值裕度=6.02dB B. 对数幅值裕度=2dB 转折频率=8 D. 转折频率=0.5相角裕度:幅值裕度:在工程设计中,一般取,非最小相位系统的特性和特性之间不具有一一对应关系最小相位系统指具有最小相位传递函数的系统,最小相位传递函数函数即的全部极点均位于奈奎斯特稳定判据是利用系统的开环频率特性来判断闭环系统的稳定性的。
对于一个开环传递函数中没有虚轴右侧零、极点的最小相位系统而言,曲线越靠近((其中)A. B.C. D.(其中)A. B.C. D.第六章控制系统的校正装置综合(其中)A. B.C. D.(其中)A. B.D.零阶保持器的作用:使采样信号每个采样瞬时的采样值]一直保持到离散系统的特征方程是稳定的。
自动控制原理第四章

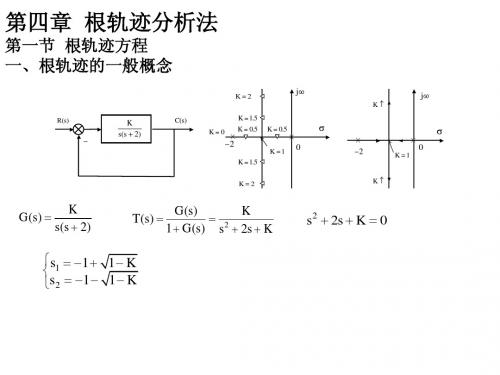
举 例
s 2 + 2sk + 1 = 0 ; ⇓ s2 + 1 2sk = −1 ;
s+a = −1 ; s(s + 1) ⇓ a = −1 ; s(s + 2)
s−a = −1 ; s(s + 1) ⇓ a =1 ; s(s + 2)
s +1 = −1 ; s(Ts + 1) ⇓ 0.5Ts 2 = −1 ; s + 0.5
根轨迹的重合点
二重根的确定:满足特征方程和特征方程的导数方程。 二重根的确定:满足特征方程和特征方程的导数方程。
Gk (s) = −1 ′ * k Q(s) ′ = Q′(s)P(s) − Q(s) P′(s) = 0 Gk (s) = P(s) K * (重合点时,根轨迹增 益的取值) ⇒ s1,2 (重合点坐标) 举例: 举例: 180 0 分离角的确定: 分离角的确定: θ = d k l Gk (s) = 三重根的确定
本章四次课) 第四章 根轨迹分析法 (本章四次课 本章四次课
特征根位置是确定系统稳定与否的唯一条件; 特征根位置是确定系统稳定与否的唯一条件; 特征根位置(闭环极点)和闭环零点共同决定了系统的动态性能; 特征根位置(闭环极点)和闭环零点共同决定了系统的动态性能; 动态性能分析的难度——确定特征根在右半平面的位置。 确定特征根在右半平面的位置。 动态性能分析的难度 确定特征根在右半平面的位置
绘制一般根轨迹, 定特殊点的参数: 三、 已知系统开环传递函数 ,绘制一般根轨迹,确 定特殊点的参数: k k 1) G k(s) = 2 ; 2) G k(s) = ; 2 s (s + 2) (s + 2)3 k(s + 1) k(s 2 + 2s + 2) 3) G k(s) = ; 4) G k(s) = ; s(s 2 + 4s + 5) s(s + 2)
根轨迹法 例题和习题
s j
代入上方程,令
Re( D( j )) 4 8 2 2K 0
Im(
D(
j
))
(6
K
)
5 3
0
解得:
K
0 0
1.61
第4章 根轨迹分析法
(1948年美国Evans伊文思 提出)
4.1 根轨迹的基本概念 4.2 绘制根轨迹的基本方法 4.3 广义根轨迹 4.4 用根轨迹法分析系统性能 4.5 MATLAB用于根轨迹分析
红河学院自动化系
自动控制原理
法则 1 根轨迹的起点和终点
法则 2 根轨迹的分支数,对称性和连续性
s( s 10 j10 )( s 10 j10 )
解 ⑴ G( s )
K*( s 2 )
( s 1 j2 )( s 1 j2 )
根轨迹绘制如下:在s平面上标注零极点
① 实轴上的根轨迹: ,2
② 分离点与汇合点:
1 1 1 d 1 j2 d 1 j2 d 2
解之得: d 4.23
从实轴上最右端的开环零、极点算起,奇数开环零、 极点到偶数开环零、极点之间的区域必是根轨迹。
定理: 若系统有2个开环极点,1个开环零点,且在复平面存在根轨迹, 则复平面的根轨迹一定是以该零点为圆心的圆弧。
红河学院自动化系
自动控制原理
n
m
pi zi
法则4 渐近线: 渐近线交点
a
i 1
j 1
nm
K*1ຫໍສະໝຸດ 1 j 3 1 1 j 3 2 1 j 3 4
解出 : K* 12
红河学院自动化系
K K* 3 82
自动控4制-4原已理知单位反馈系统的开环传递函数,试概略绘出相应的根轨迹。
自动控制理论_哈尔滨工业大学_4 第4章根轨迹法_(4.1.1) 根轨迹法的基本概念
( j 1,2,, m) —开环零点 (i 1,2,, n) —开环极点
K1可以称作根迹增益或根轨迹放大倍数,K是系统的开环增益。 将零极点形式用于绘制根轨迹比较方便。将其代到幅值条
件和相角条件中可以得到
幅值条件 相角条件
m
K1 s z j
j 1 n
1或
s pi
i 1
92.49o
2.61
127.53o
-0.825 ξ=0.466 ω n=2.34
s1=-0.825
0.5
s2,3= -1.09±j2.07
K*= 2.26×2.11×2.61 = 6.0068
2.072
92.49o- 66.27o- 78.8o- 127.53o= –180o
本节小结
根轨迹的原本概念、原理、条件。
阻尼比ζ的上界, 也可以保证 一定的自然振荡频率ωn,以及 阻尼振荡频率 ωd。
1
r2
Im
r
Re
α
q
d r
如果设定区域
r n r n q min
r n r
则选择 r min q,
1
n
s pi
K1
i1 m
szj
j 1
m
n
(s zj ) (s pi) (2q 1)180
q 0,1,2,
j1
i1
求模求角例题
78.8o -1.09+j2.07
66.27o
2.26 2.112.072
-2 -1.5 -1
模值条件与相 角条件的应用
闭环系统特征方程为: 1+G(s)H(s)=0 或 G(s)H(s)= -1
第4章 控制系统的根轨迹分析

绘制根轨迹如图4-13所示。
第4章 控制系统的根轨迹分析
图4-13 例4-5系统的根轨迹
第4章 控制系统的根轨迹分析
图中根轨迹与虚轴的交点可从系统临界稳定的条件
得到τ=1。τ=1时系统的特征方程为
得与虚轴交点的坐标为jω=±j。从根轨迹得到系统稳定时τ
的取值范围为0<τ<1。
第4章 控制系统的根轨迹分析
θj(j=1,2,3,4)。选取实轴上一点s0,若s0为根轨迹上的点,必满足
相角条件,有
第4章 控制系统的根轨迹分析
图4-5 实轴上根轨迹相角示意
第4章 控制系统的根轨迹分析
下面分别分析开环零、极点对相角条件的影响,进而分
析对实轴上根轨迹的影响。
(1)共轭复数极点p4和p5到点s0的向量的相角和为
φ4+φ5=2π,共轭复数零点到s0点的向量的相角和也为2π。
(2)实轴上,s0点左侧的开环极点p3和开环零点z2到点s0所
构成的向量的夹角φ3和θ2均为零度。
(3)实轴上,s0点右侧的开环极点p1、p2和开环零点z1到点
s0 所构成的向量的夹角φ1、φ2和θ1均为π。
第4章 控制系统的根轨迹分析
第4章 控制系统的根轨迹分析
若系统稳定,由劳斯表的第一列系数,有以下不等式成立:
得0<K* <78.47。
由此可知,当 Kc* =78.47时,系统临界稳定,此时根轨迹穿
过虚轴。K* =78.4ω 值由以下辅助方程确定:
将 K* =78.47代入辅助方程,得
解得s=±j2.16。
第4章 控制系统的根轨迹分析
对于例4-1,其在实轴上的根轨迹一条始于开环极点,止于
开环零点(根轨迹位于-2到-5之间),另两条始于开环极点,止于
自动控制原理第4章根轨迹法精

m
( zj )
K K*
J 1 n
( pi )
i 1
zj
1
j
(j
1,2,, m);
pi
1 Ti
(i
1,2,, n)
可写出幅值方程与相角方程,即
G(s)H (s) 1
G(s)H(s) 1
开环零点: z1 1.5; z2,3 2 j
(1)实轴(0~1.5)和( 2.5 ~ )有根轨迹。
(2)渐近线n=4 m=3,故只有一条根轨迹趋向无穷远。由实根
轨迹可知 180 。
(3)根轨迹出射角与入射角。
出射角
3
4
p2 ( 2K 1) ( p2 zi ) ( p2 pi )
d= -3.7
s2 4s 1 0
解法2 用公式有
1 1 1
d 1 j 2 d 1 j 2 d 2
解此方程 d1 3.7, d2 0.3
d1在根轨迹上,即为所求的分离点,d2不在根轨迹上舍去。 因为
z1 2, p1,2 1 j 2 n=2,m=1
系统有两条根轨迹,一条消失于零点,另一条趋于负无穷远 在实轴(-2,-∞)区段有根轨迹。 出射角
4.1根轨迹与根轨迹方程
什么是时域分析? 指控制系统在一定的输入下,根据输出量的时
域表达式,分析系统的稳定性、瞬态和稳态性能。
4.1.1 根轨迹 4.1.2 根轨迹方程
4.1.1 根轨迹
[根轨迹定义]:系统开环传递函数增益K(或某一参数)由零到 无穷大变化时,闭环系统特征根在S平面上移动的轨迹。
例:如图所示二阶系统,
第4章 根轨迹法
m n
sk
s+
jω
s+p
s
j=1 n
=
1 ; K gk
−z j
z
j
i
αj
βi
σ
0
∑ α jk − ∑ βik = ±180 (1 + 2k) (k = 1, 2,⋯)
j=1 i =1
−p i
幅值条件为:
∏ s + zj ∏ s + pi
i =1 j=1 n
m
1 = Kg
幅角条件:
∑ α j − ∑ βi = ±180 (1 + 2k)
j=1 i =1
m
n
(k = 1, 2,⋯)
三、应用幅值条件确定 K g 值
jω
△
某控制系统的开环传递函数为
1 K g (s + ) K(8s + 1) 8 G(s)H(s) = 2 = s (2s + 1) s 2 (s + 1 ) 2
-0.5 L3
sk L 1,2 l 60° σ
1 8 1 p1 = − 2 z1 = −
可见,闭环零点由前向通道的零点和反馈通道的极点组成, 闭环零极点放大系数等于前向通道零极点放大系数 K Gg 。
一、根轨迹的连续性 第二节 绘制根轨迹的一般规则 二、根轨迹的分支数 三、根轨迹的对称性 四、根轨迹的起点和终点
m m
j=1 lim n s→∞ i =1
∏ s + zj ∏ s + pi
六、根轨迹的分离点和会合点
D(s) K g (s) = − N(s)
dK g (s) ds
=0
D' (s)N(s) − N ' (s)D(s) = 0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
习题4.1 已知下列负反馈的开环传递函数,应画零度根轨迹的是:(A)A *(2)(1)K s s s -+B *(1)(5)K s s s -+C *2(31)K s s s -+D *(1)(2)K s s s --4.2 若两个系统的根轨迹相同,则有相同的:(A)A 闭环零点和极点B 开环零点C 闭环极点D 阶跃响应4.3 己知单位负反馈控制系统的开环传递函数为*()()(6)(3)K G s H s s s s =++ (1) 绘制系统的根轨迹图(*0K <<∞);(2) 求系统临界稳定时的*K 值与系统的闭环极点。
解:系统有三个开环极点分别为10p =、23p =-、36p =-。
系统有3条根轨迹分支,分别起始于开环极点,并沿渐进线终止于无穷远。
实轴上的根轨迹区段为(],6-∞-、[]3,0-。
根轨迹的渐近线与实轴交点和夹角分别为()()36 33a σ-+-==-,() (0)321 (1)3 (2)3a k k k k πϕππ⎧=⎪+⎪===⎨⎪⎪-=⎩求分离点方程为111036d d d ++=++ 经整理得2660d d ++=,解方程得到1 4.732d =-、2 1.268d =-。
显然分离点位于实轴上[]3,0-间,故取2 1.268d =-。
求根轨迹与虚轴交点,系统闭环特征方程为32*()9180D s s s s K =+++=令j s ω=,然后代入特征方程中,令实部与虚部方程为零,则有[][]2*3Re (j )(j )190Im (j )(j )1180G H K G H ωωωωωωω⎧+=-+=⎪⎨+=-+=⎪⎩ 解之得 *00K ω=⎧⎨=⎩、*162K ω⎧=±⎪⎨=⎪⎩显然第一组解是根轨迹的起点,故舍去。
根轨迹与虚轴的交点为s =±,对应的根轨迹增益*162K =为临界根轨迹增益。
根轨迹与虚轴的交点为临界稳定的2个闭环极点,第三个闭环极点可由根之和法则求得1233036λλλλ--=++=+解之得39λ=-。
即当*162K =时,闭环系统的3个特征根分别为1λ=、2λ=-39λ=-。
系统根轨迹如图4.1所示。
图4.1 题4.3所示系统根轨迹图4.4绘制系统的根轨迹(0K <<∞),并确定系统欠阻尼状态下的K 值。
解:系统闭环传递函数为 ()()()2929()99299122s s s Ks s s Ks s s s s φ+==+++++++。
特征方程为22990s s Ks +++=。
等效开环传递函数为 29()()29KsG s H ss s =++。
系统有2条根轨迹分支,起始于开环极点1,21p =-±,1条终止于开环零点0z =,另一条沿渐进线终止于无穷远。
实轴上的根轨迹区段为(],0-∞。
根轨迹的渐近线与实轴交点和夹角分别为((11 21aσ-++--==-,()21 0,2ak ϕπ+== 实轴上分离点方程为22909d s s ds Ks ⎛⎫++= ⎪⎝⎭。
解方程得到13d =-、23d =(弃去),对应49K =。
根轨迹与虚轴在有限范围内无交点,根轨迹如图4.2所示。
图4.2 题4.4所示系统根轨迹图由根轨迹可知当409K <<时,系统有两个闭环极点,为欠阻尼响应。
4.5 已知负反馈控制系统的闭环特征方程为*2(14)(22)0K s s s ++++= (1) 绘制系统的根轨迹(*0K <<∞);(2) 确定使复数闭环主导极点的阻尼系数0.5ζ=的*K 值。
解:系统开环传递函数为*2()()(14)(22)K G s H s s s s =+++开环极点为114p =-、2,31j p =-±。
实轴上根轨迹区段为(],14-∞-。
根轨迹的渐近线与实轴交点和夹角分别为()()()1411 5.33a j j σ-+--+--==-,() (0)321 (1)3 (2)3a k k k k πϕππ⎧=⎪+⎪===⎨⎪⎪-=⎩实轴上分离点方程为11101411d d j d j++=++++-,解之得9.63d =-。
求与虚轴交点,闭环特征方程为*2()(14)(22)D S K s s s =++++。
令j s ω=,然后代入特征方程中,令实部与虚部方程为零,则有[][]2*3Re (j )(j )116280Im (j )(j )1300G H K G H ωωωωωωω⎧+=-++=⎪⎨+=-+=⎪⎩,解得 * 5.4438.6K ω=±⎧⎨=⎩。
因cos 0.5β=,故60β=︒,作过原点与负实轴夹角为60±︒的直线,在s 上半平面交P 、Q 两点,如图4.3所示。
P 点坐标为0.94j 1.62s =-+,则对应*0.94j1.62(14)(0.94j 1.62)(0.94j 1.62)21.61s s s s K =-+++-++==图4.3 题4.5所示系统根轨迹图4.6 已知单位反馈系统的开环传递函数为*()()(1)(1)2.56K G s H s s s s =++(1) 绘出K 由0→∞变化时系统的根轨迹 (根轨迹的分离点、渐近线、与虚轴交点的数值要求精确算出)。
(2) 用根轨迹法分析:能否通过调整K 使系统的阶跃响应超调量%25%σ<,为什么? (3) 能否通过调整K 使系统的静态误差系数15K ≥,为什么?解:系统开环传递函数为*()()(1)(1)2.56K G s H s s s s =++化成根轨迹形式为*()()( 2.5)(6)K G s H s s s s =++,其中*15K K =。
(1) 开环极点为10p =、2 2.5p =-、26p =-。
实轴上根轨迹区段为[]2.5,0-、(],6-∞-。
根轨迹的渐近线与实轴交点和夹角分别为()()2.56 2.833a σ-+-==-,() (0)321 (1)3 (2)3a k k k k πϕππ⎧=⎪+⎪===⎨⎪⎪-=⎩实轴上分离点方程为1112.56d d d +=++,解出1 1.1d =-、2 4.56d =-(弃去)。
求与虚轴交点,闭环特征方程为*()( 2.5)(6)D S K s s s =+++令j s ω=,然后代入特征方程中,令实部与虚部方程为零,则有[][]2*3Re (j )(j )18.50Im (j )(j )1150G H K G H ωωωωωωω⎧+=-+=⎪⎨+=-+=⎪⎩ 解得 * 3.87127.5K ω=±⎧⎨=⎩。
做出根轨迹如图4.4所示。
图4.4 题4.6所示系统根轨迹图(2) 当%25%eσ-=<时,即0.403ζ>,或cos66.2arβζ<<︒。
作过原点与负实轴夹角为66.2±︒的直线,与根轨迹有交点为P、Q两点,如图 3.35所示。
P点坐标为0.8j1.7s=-+,使用幅值条件计算此点对应的*K,即*8j1.7( 2.5)(6)24.6sK s s s=-+=++=*15 1.64K K=÷=(3) 从根轨迹曲线可知,当*127.5K≥即8.54K≥,系统是不稳定的,故无法通过调整K 使系统的静态误差系数15K≥。
4.7K值范围。
解:系统开环传递函数为(0.251)()()(0.51)K sG s H ss s+=+,化成根轨迹形式为*(4)()()(2)K sG s H ss s+=+,其中*0.5K K=。
系统开环极点为1p=、22p=-,开环零点为4z=-。
实轴上根轨迹区段为[]2,0-、(],4-∞-。
渐近线与实轴的夹角为()2121akπϕπ+==-实轴上分离点方程为11124d d d+=++,解出11.172d=-、26.828d=-,根轨迹如图4.5所示。
图4.5 题4.7所示系统根轨迹图系统无超调即特征根全部为负实数,从根轨迹图中看出,分离点1 1.172d =-与会和点2 6.828d =-为临界点,需求出此两点所对应的K 值。
系统的特征方程为20.5(10.25)0s K s K +++=分别将1 1.172s d ==-、2 6.828s d ==-代入上式可解得10.686K =、223.31K =。
由此求得系统无超调响应的K 值范围是00.686K ≤≤、23.31K ≤≤+∞4.8 设正反馈系统的开环传递函数为2(2)()()(3)(22)K s G s H s s s s +=+++ 画出K 变化时系统的根轨迹.解:开环极点为1,21p j =-±、33p =-,开环零点为2z =-。
实轴上根轨迹区段为[)2,-∞、(],3-∞-。
渐近线与实轴的夹角为 20,31a k πϕπ==- 实轴上分离点方程为()()232202s s s d ds s ⎡⎤+++⎢⎥=+⎢⎥⎣⎦,解出10.8d =-、2,3 2.35j0.77d =-±。
其中10.8d =-是根轨迹上的分离点。
出射角方程为()()()11112130 =0459027 =72p z p p p p θ=︒+∠--∠--∠-︒+︒-︒-︒-︒272θ=︒1d 处的分离角方程为()()11113112=(200)22d k d z d s k θππ⎡⎤=+∠--∠-+︒-︒⎣⎦当10,0d k θ==︒;当11,d k θπ==,即1d 处的分离角为0︒、π。
1d 处的会合角方程为()()()()()11112131112121 =21002d k d p d p d s k ϕππαα⎡⎤=++∠-+∠--∠-⎣⎦++-+︒-︒⎡⎤⎣⎦当10,2d k πϕ==;当11,2d k πϕ==-,即1d 处的会合角为2π±。
根轨迹与虚轴交点为0ω=,根轨迹如图4.5所示。
图4.6 题4.8所示系统根轨迹图4.9 设单位反馈系统的开环传递函数为10(1)()(0.51)(1)s G s s Ts -=++画出T 变化时系统的根轨迹。
解:系统的特征方程为(0.51)(1)10(1)0s Ts s +++-=。
对上式变换为(0.51)9.5110Ts s s +-+=。
等效闭环传递函数为 *(2)()1119.5T s s s s ϕ+=--。
等效开环传递函数为*(2)()()119.5T s s G s H s s +=-,其中*29.5TT =⨯。
可知该系统根轨迹应使用0︒根轨迹绘制方法。
渐近线与实轴的夹角为 212a k πϕ=-,解之得 0,a ϕπ=。
实轴上的根轨迹为[]2,0-、[)1.16,∞。
分离点为方程为 *119.50(2)s d ds T s s ⎡⎤-⎢⎥=⎢⎥+⎢⎥⎣⎦,解之得10.75d =-、2 3.07d =,代入到特征方程中得到 1.71T =与38.76T =。