微机网络控制系统-图文
微机控制系统与应用图文

微机控制系统与应用图文一、前言随着计算机技术的发展,微机控制系统在各个领域中得到了广泛应用。
本文将从概念、组成、分类、特点以及应用等方面对微机控制系统进行详细介绍,并结合图文进行展示。
二、概念微机控制系统是指以单片机或微处理器为核心,配合运算放大器、电源自动控制、接口电路及相关传感器等智能化硬件,通过编程实现自动化控制或智能控制的一种系统。
三、组成微机控制系统主要由以下几部分组成:1.微处理器:作为微机控制系统的中央处理器,负责对各种输入信号进行处理,并向外部输出控制信号。
2.存储器:包括程序存储器和数据存储器,用于存储控制程序及相关数据。
3.接口电路:用于连接外部设备,如传感器、执行机构等,完成与外部的数据交换。
4.人机界面:包括显示器、按键和通讯接口,用于人机交互。
四、分类根据其功能用途,微机控制系统分为工控机、嵌入式系统、家用电器控制系统、汽车电子控制系统等。
1.工控机:适用于工业、医疗、交通等领域,具有稳定可靠、高性能、高精度等特点。
2.嵌入式系统:适用于家电、手机、仪器仪表等领域,具有体积小、功耗低、价格低廉等特点。
3.家用电器控制系统:适用于家用电器控制,如洗衣机、空调等,具有多功能、低功耗等特点。
4.汽车电子控制系统:是一种典型的嵌入式系统,应用于汽车中的控制模块,如发动机控制模块、制动控制模块等。
五、特点微机控制系统具有以下几个特点:1.精准控制:微机控制系统可以实现精确控制,根据不同的需求对各种输入信号进行处理,并向外部输出控制信号。
2.自适应能力:微机控制系统具有自适应能力,可以根据不同的工作环境和工作条件,对控制策略进行智能调整。
3.稳定可靠:微机控制系统具有稳定可靠的特点,可以在恶劣的环境下长时间稳定运行。
4.扩展性强:微机控制系统具有扩展性强的特点,可以根据不同的需求,进行功能扩展。
六、应用微机控制系统已广泛应用于各个领域中,包括工业自动化、家电控制、汽车电子等领域,以实现自动化控制、智能化控制等多种应用。
HXD3D机车网络控制系统、主变压器、应急处理

HXD3D型交流传动 快速客运电力机车 微机控制系统及主变压器
技术开发部 电气二室 王乐 民
中国北车集团大连机车车辆有限公司
Dalian Locomotive &Rolling Stock Co., Ltd CNR Group
精品文 档
主要内容:
一、微机网络控制系统简介 二、主变压器简介 三、常见故障处理
精品文 档
精品文 档
主界面
精品文 档
锁屏界面
精品文 档
列车信息-机车纵览界面
精品文 档
控制-隔离界面
精品文 档
控制-受电弓预选择界面
精品文 档
控制-距离计数器界面
精品文 档
空气制动系统-制动信息界面
精品文 档
空气制动系统-隔离阀状态界面
精品文 档
过程数据-列车界面
精品文 档
过程数据-驱动界面
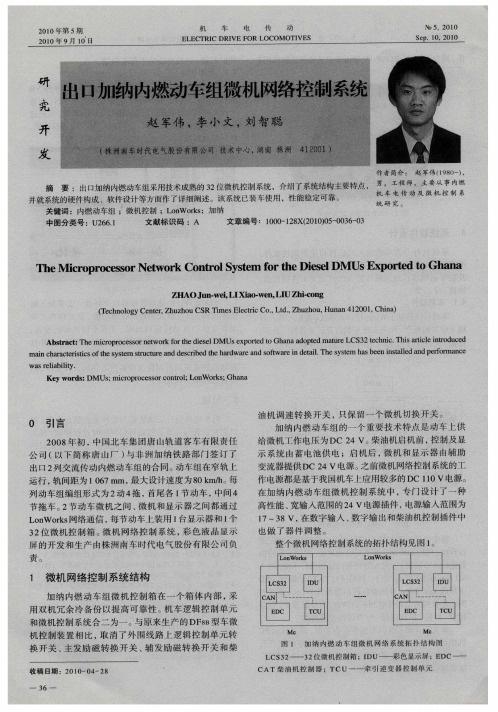
出口加纳内燃动车组微机网络控制系统
3 一 6
第 5期
赵 军 伟 ,李 小 文 ,刘 智 聪 : 出 口加 纳 内燃 动 车 组 微 机 网 络 控 制 系 统
1路 2 1路 2 3路 4 路
L n rs Biblioteka Wok 总线 由机车级控制总线 和动 车组通 信总 线组成 。 D E C为柴油机控制器 , 其通过C N总线将柴油 A
换 开关 、 主发励 磁 转换 开 关 、 发励 磁 转换 开 关 和柴 辅
收 稿 日期 :2 0 4 8 01 —0 -2
—
图 1 加 纳 内 燃 动 车组 微 机 网 络 系统 拓 扑 结 构 图 L 3 —— 3 位 微机控 制箱 ;I CS 2 2 DU——彩 色显示屏 ; D E C—— cAT柴 油机 控 制 器 ;TCU一 一牵 引逆 变器 控 制 单元
Z HAOJ n we, X a - n L UZ i o g u - t LI i o we , I h - n c
( e h oo yCe trZh z o R Tme e t cCo, d, u h u Hu a 0 , ia T c n lg ne, u h uCS i s cr .Lt.Zh z o , n n41 01 Chn ) El i 2
wa eibiiy. sr la lt Ke y wor s d :DM Us ;m ir pr ce s rc to ;Lon or ; h a c o o s o on l r W ks G a n
0 引 言
20 0 8年初 , 国北 车集 团唐 山轨道客 车有 限责任 中 公司 ( 以下 简称 唐 山 厂 ) 与非 洲 加纳 铁 路部 门签订 了 出 口2 列交流传动 内燃 动车组 的合 同 。 动车组 在窄轨上 运行 , 轨间距为 1 6 7 0 mm, 最大设计速度为 8 m h 每 0k / 。 列动车组 编组形式 为 2 动4 , 拖 首尾各 l 节动 车 , 中间4 节拖 车。 节动 车微机之 间 、 机和显 示器 之间都通 过 2 微 L n rs o Wok 网络通信 , 每节 动车上装用 1 台显示器 和 1 个 3 位微 机控 制箱 。 机 网络控 制 系统 , 色液 晶显 示 2 微 彩 屏 的开 发和生 产 由株 洲南 车时代 电气股份 有 限公 司负 责。
hxd3d机车网络控制系统、主变压器、应急处理-大连机车王乐民1022学习资料
系统的构成 机车控制监视系统在硬件上主要由电源模块、逻辑运算控制部分、 数字量输入/输出部分、模拟量信号采集部分、通信部分等组成。 主控制单元采用32位CPU,并在配置上采取冗余、双机热备措施, 以提高系统的可靠性。
机箱内包括AVR电源模块,为TCMS提供工作所需的各种直流电,如24V、±15V、 5V;
过程数据-网络控制-软件版本界面
过程数据-网络控制-信号信息界面
过程数据-网络控制-传送信息界面
过程数据-计数界面
过程数据-计数-设定界面
维护界面
数据输入-轮径界面
数据输入-轮径界面
数据输入-轮缘润滑界面
数据输入-日期/时间设置界面
数据输入-其它设置界面
数据输入-车辆号码界面
TCMS对外接口
名称 RS485 RS485 RS485 RS485 RS485 RS485 RS485 数据总线(Ethernet) 110V数字量输入 脉冲输入 110V数字量输出 110V数字量输出 模拟量输人0-8A 模拟量输人0-24V 模拟量输人0-5A 模拟量输入0-20mA
数量 2 2 2 1 1 1 1 2
维护测试-主司控器试验界面
维护测试-起动试验界面
维护测试-零级位试验界面
维护测试-辅助电源试验界面
维护测试-显示灯试验界面
维护测试-无人警惕试验界面
维护测试-轮缘润滑试验界面
事件履历-无过滤界面
详细-故障信息界面
事件履历-激活事件界面
司机诊断-事件确认界面
司机诊断-激活事件界面
显示界面 显示部分设计的原则是以HXD3B机车的显示画面为基础,融合
HXD3C机车现有的显示习惯,力求显示简洁、明了醒目。 画面的上部为各项功能选择的触摸键,系统能够根据不同的工况
第1章微型计算机控制系统概述

PIO:并行I/O接口
接口电路
SIO:串行I/O接口 中断控制器
DMA
的
操作设备:由显示器、键盘、指示灯等组成
组
成
系统软件:OS、编译诊断程序、监控程序
软件 应用软件:针对过程编写的控制、管理程序
包括输入、控制、输出及显示打印程序
第一章 微型计算机控制系统概述
1.2 微型计算机控制系统的组成
4、检测元件及执行机构
在微机控制系统中,为了对生产过程进行控制,首先必须对各种数据,如 温度、压力、流量、液位、成分等进行采集。为此,必须通过检测元件,即 传感器,把非电量参数转换成电量。此外,为了控制生产过程,还必须有执 行机构。它们的作用就是控制各参数的流入量。
5、通用外部设备
主要为了扩大主机的功能而设置的,是实现微机和外界交换信息的功能的设备。 常规外部设备可分为输入设备,输出设备和存储设备,并根据控制系统的规 模和要求来配置。
第一章 微型计算机控制系统概述
1.1 微型计算机控制系统的结构原理
给定信号
微型计算机 微处理器
D\A转换器
执行机构
被控参数 被控对象
A\D转换器
1、控制过程 图1.3 计算机控制系统基本框图
从本质上看,微型计算机控制系统的控制过程可以归纳为以下四 点: (1)实时数据采集:对被控参数的瞬时值进行检测,并且将采样 结果输入计算机; (2)实时决策:对输入的实时给定值与被控量的数值进行处理后, 按照预先规定的控制规律进行运算,则称为实时决策,或简称决策;
(3)保护重要数据的后备存贮体
Watchdog和掉电保护功能均要有能保存重要数据的存贮体支持, 后备存贮体容量不大,在系统掉电时数据不会丢失,故常采用 NOVRAM,EEPROM或常有后备电池的SRAM,为了保证可靠、安 全,系统存贮器工作期间,后备存贮体应处于上锁状态。
HXD3B——精选推荐
HXD3B型机车是以在中国国内主干线上进行重载货运牵引为目的进行设计研发的交流传动电力机车。
机车的微机网络控制系统采用庞巴迪公司提供的MITRAC系列产品,MITRAC机车控制系统由多微机环境组成,包括列车控制级、机车控制级以及驱动控制级。
本文针对HXD3B型机车微机网络控制系统进行分析和研究机车网络控制系统结构组成HXD3B型机车采用先进的分布式微机网络控制系统,其通讯方式基于TCN列车通信网络和Ethernet(以太网)。
具体的网络拓扑结构见图每台HXD3B型机车的微机网络控制系统由2组机车控制单元VCU,2组网关TCN-GW,3组牵引控制单元DCU2,2组以太网交换单元CablingSwitch,2组司机显示单元DDU,1组制动控制单元BCU以及分布于各个电器柜内的输入输出(I/O)模块和高压柜内的AMP模拟监测保护装置等构成。
整套微机网络控制系统采用模块化设计,所有设备均采用冗余配置模式,从而提高了机车微机网络控制系统的可靠性,实现了机车的冗余控制WTB列车总线的传输介质为双绞屏蔽线,最多可连接32个节点(无中继器),传输距离为860m(无中继器),传输速率为1Mb/s。
MVB多功能车辆总线用于连接机车内部的各个网络设备,机车总线管理器位于TCMS柜内的机车控制单元VCU1和VCU2内。
为提高系统的电磁兼容性能,HXD3B型机车MVB多功能车辆总线的传输介质采用两种类型的介质:ESD+双绞屏蔽线和光纤(OGF)。
ESD+双绞屏蔽线主要用于电气屏柜内部器件的连接,光纤(OGF)主要用于屏柜之间的连接。
MVB总线采用总线型和星型混合的拓扑结构MVB总线采用双路冗余结构进行数据传输,同时为提高系统的可靠性,MVB总线被分割成3段,设为第一段、第二段及第三段,3段传递的信息是相同的,各个电气屏柜均采用双段信息输入,当某一段MVB总线通讯故障时,其他两段仍可实现信息传递,从而确保机车的安全可靠运行Ethernet主要用于软件下载、信息采集、程序调试及VCU与显示单元之间的信息传递,其具体拓扑结构如图4所示1.2系统设备1.2.1机车控制单元VCU机车安装有两个VCU,采用热备份冗余方式。
HXD3微机网络系统介绍

2.机车微机控制系统
• 微机控制系统(简称TCMS)是机车的控 制核心,微机控制柜连接机车主变流器、 辅助变流器、控制电器柜、司机室操作 台控制开关等电器设备,收集指令信息 和各个电器设备的状态信息,综合处理 后,完成机车的控制功能。 • 重联时通过Ethernet,向重联机车发送运 行指令,接收重联机车的反馈信息。
显示屏
与他车TCMS重联 各开关 速度传感器(PG) 蓄电池电压 电流互感器 司控器 LED指示灯
38.4kbps
通过Ethernet连接
2轴和5轴
原边电流 司机控制器级位 功率较小
110V数字量输出
19
BRAKE、VCB、升弓、撒沙等
功率较大
2.3 TCMS机箱外形结构
2.2 TCMS单元构成
2.3
TCMS主要完成的控制
• 牵引制动特性曲线的控制;(23t和25t切换:主CPU搭载 基板PUZ33上的开关SW1置”0”是23t,开关SW1置”0以 外的数”是25t) 图 • 定速控制;(速度≥15km/h,未采用空气制动) • 禁止功率输出; • 升弓控制;(控制上保证必须先断主断,才能降弓) • 压缩机起停控制; • 110V电源屏的控制; • 自动过分相控制; • 警惕装置控制;
微型计算机控制系统的设计WK
3.模糊控制 模糊控制也叫Fuzzy控制。是按照人的思维方 法去完成各种控制。采用这种方法,不需要数 学模型,只要把设计者的控制决策(即专家意 见)用模糊规则加以描述,即可实现模糊控制 。 模糊控制的特点是简单,执行速度快,占用 内存少,开发方便、迅速,因而近几年得到了 广泛的应用。
•微机控制技术
5.1 积分分离的PID算式
设给定值为R(k),经数字滤波后的测量值为M(k), 最大允许偏差值为A,则积分分离控制的算式为
当
图7中曲线1为采用积分分离手段后的控制曲线,比
较曲线1和2可知,使用积分分离方法后,显著降低了
被控变量的超调量和过渡过程时间,使调节性能得到
改善。
•微机控制技术
•微机控制技术
变速积分PID优点: (1)实现了用比例作用消除大偏差
,用积分作用消除小偏差的理想调节特 性,从而完全消除了积分饱和现象;
(2)大大减小了超调量,可以很容 易地使系统稳定,改善了调节品质;
(3)适应能力强,一些用常规PID控 制不理想的过程可以采用此种算法;
•微机控制技术
(4)参数整定容易,各参数间的相互 影响小,而且对A、B两参数的要求不 精确,可作一次性确定。 变速积分与积分分离控制方法很类似,但 调节方式不同。积分分离对积分项采用 “开关”控制,而变速积分则是根据误差 的大小改变积分项速度,属线性控制。 因而,后者调节品质大为提高,是一种 新型的PID控制。
• 过零触发电路
•返回本节
4、控制策略的选择
(1)直接数字控制 直接数字控制是根据采样理论,首先把被控对象的数学模型 进行离散,然后由计算机根据离散化的数字其针对性更强,调节品质更好 。
(2)最优控制 要求系统能够根据被测参数、环境及原材料的成分的变化而 自动对系统进行调节,使系统随时都处于最佳状态。包括性 能估计(辨别)、决策和修改三个环节,它是微机控制系统发展 的方向。但由于控制规律难以掌握,所以推广起来尚有一些 问题难以解决。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
微机网络控制系统-图文
以下是为大家整理的微机网络控制系统-图文的相关范文,本文关键词为微机,网络,控制系统,图文,7章,微机,网络,控制系统,1节,您可以从右上方搜索框检索更多相关文章,如果您觉得有用,请继续关注我们并推荐给您的好友,您可以在教育文库中查看更多范文。
第7章微机网络控制系统
第1节概述
hxD2型电力机车的控制系统是由微机控制系统、worldFIp网络通信系统和Dc110V电气控制电路组成的。
hxD2型电力机车控制系统的核心控制设备是基于worldFIp网络的微机控制系统,整套微机网络控制系统采用Alstom公司的AgATeTm 系列电子产品。
通过在hxD2型电力机车项目上与Alstom公司的合作,国内铁路机车制造行业首次系统引进worldFIp网络通信技术,从而能极大的提高worldFIp网络通信技术在国内的发展水平。
hxD2型电力机车的微机网络控制系统以一节机车为一个单元,包括2组主处理单元mpu1和mpu2、2组远程输入输出模块RIom1和RIom2、4组牵引控制单元Tcu1~Tcu4、2组辅助控制单元Acu1和Acu2、2组司机显示单元DDu1和DDu2、1组制动控制单元bcu组成。
整套微机网络控制系统采用模块化设计,具有充分的可扩展性,可按照用户要求,适当的增加或减少接入FIp网络的电子设备。
hxD2型电力机车的微机网络控制系统向用户提供了完善和强大的机车控制功能,主要的控制功能包括机车控制与监控功能、网络通信功能、牵引控制功能、辅助控制功能、检修维护功能等。
hxD2型电力机车的Dc110V电气控制电路包括有接点电路、列车超速防护设备、列车通讯设备、无线重联控制设备等。
实现的功能与既有直流机车控制电路类似,用于提供部分不接入FIp网络的Dc110V 设备的控制功能。
hxD2型电力机车的有接点电路是指控制电源为Dc110V(包括Dc24V)的低压电气控制电路。
hxD2型电力机车的列车超速防护设备、列车通讯设备、无线重联控制设备,在第十一章《运行安全、通信、重联控制系统》中有详
细描述,因此本章不进行介绍。
1
第2节微机网络控制系统结构
hxD2型电力机车的微机控制系统的网络通信基础是worldFIp网络通信技术,由于hxD2型电力机车项目是国内的机车制造行业首次系统引进worldFIp网络通信技术,因此在介绍hxD2型电力机车的worldFIp网络通信系统后,需要介绍worldFIp网络通信技术的基本原理,随后再介绍hxD2型电力机车的微机控制系统。
11.1 worldFIp网络通信的原理和结构hxD2型电力机车的网络通信结构
hxD2型电力机车的微机网络控制系统的通信结构分为两级:车辆级通信和列车级通信,对应的FIp网也分为两级:FIp车辆网(FIpV 网)和FIp列车网(FIpT网)。
具体的网络拓扑结构见图7-1所示。
unitAunitbTootherlocomotiveDynamicFIpTrain(2medium)mpu1mpu2Dyn amicFIpTrain(2medium)LocoTRoLunITbTootherlocomotiveunitADisplayun itscab1Rs422LocoTRoLunITARs422mpu1mpu2unitbDisplayunitscab2han dlethrottleRIom1RIom1handlethrottleFIpVehiclenetwork(2medium)RIom 2RIom2FIpVehiclenetwork(2medium)maintenanceplugAcu1Acu2bcubcu Acu1Acu2maintenanceplugTcu1Tcu2Tcu3Tcu4Tcu1Tcu2Tcu3Tcu41Tcubya xle1Tcubyaxle1Tcubyaxle1Tcubyaxle图7-1hxD2型电力机车微机网络控
制系统的网络拓扑结构图
1.1.1FIp车辆网(FIpV网)
hxD2型电力机车微机网络控制系统的车辆级通信是通过FIpV网进行,通过
2
FIpV网进行通信的设备包括:主处理单元mpu、远程输入输出模块RIom、牵引控制单元Tcu、辅助控制单元Acu、制动控制单元bcu、司机显示单元DDu。
同时FIpV网允许增加新的附加设备,以提供新的功能,如gps系统或Tcn接口等。
(1)FIpV网的功能
FIpV网用于实现每节机车内部的设备之间的信息交换,每节机车的FIpV网均采用两路介质冗余设置,以保证网络通信的正常。
FIpV网主要实现下述功能:
?设置RIom、Tcu、Acu、bcu、DDu的参数。
?实现mpu与其它设备之间的周期性数据交换。
?实现mpu与其它设备之间的非周期性数据交换(维护用)。
?在FIpV网内部提供统一的日期和时间。
(2)FIpV网的主要特点?FIpV网用于每节机车内部设备之间的功能和信息交换,每节机车都拥有一个带冗余介质的FIpV网来保证接入FIpV网的各个设备之间的数据交换。
每台hxD2型电力机车拥有两套相互独立的FIpV
网。
?FIpV网是一个静态地址网,需要人为定义连接在FIpV网内的各个设备的网络地址,以保证设备间的正常通信。
?FIpV网是一个具有冗余功能的网络,它使用双线介质冗余方案,用于增加机车的功能有效性。
?FIpV网的最多允许接入的节点数是32个。
?FIpV网和一套主控-从控装置一起工作,主控设备称为总线仲裁器(bA),FIpV网采用双总线仲裁器冗余方式,在FIpV网络上任意时刻只能存在一个总线仲裁器处于工作状态,另一个总线仲裁器处于热备状态,一旦主总线仲裁器出现故障,备用总线仲裁器能立即投入正常工作。
?总线仲裁器功能由mpu管理(主mpu负责计算机冗余管理)。
?FIpV网采用变压器隔离。
?FIpV网的传输速度为铁路机车车辆的专用速率1mb/s。
?FIpV网采用曼切斯特编码。
3
?FIpV网使用一个16位的多项式cRc检验和(循环冗余检验和)来保证数据的完整性。
?FIpV网的基本交换周期为40ms。
?FIpV网的总线电阻值120?。
?FIpV网的主控设备为mpu1或mpu2。
?在FIpV网的网络终端放置有终端电阻,其目的是:---
使网络终端匹配电缆的阻抗特性;固定导线的电势;消除对线路的影响。
?可以使用一个反射仪来检验机车FIpV网络的质量,反射仪可以提供接入FIpV网络的各个节点的状态。
(3)FIpV网的信息类型
FIpV网的接入只有总线仲裁器能够管理,总线仲裁器负责安排信息交换。
交换的信息包括周期性变量(确定性交换)或非周期性信息(非确定性交换)。
对于周期性数据,其大小在1~128字节之间,总线仲裁器使用一个包含数据所有标志符的表,将数据在预定的时间传送至网络,以安排数据交换。
对于非周期性数据,本类数据在周期性数据交换之间的网络空闲时间内传送。
每条数据的大小不超过256字节,它通过源地址和存储器地址识别(点到点传送)。
(4)FIpV网的传输介质
FIpV网的传输介质为所有连接在FIpV网络内的设备提供冗余设计,相应的生产者/消费者规则如下:
?对于生产者,所有的数据按两种介质系统地发送。
?对于消费者,要考虑的是第一个到达的数据。
在下列情况下,一种方式是无效的:?超过门槛值后的时间内收到的结构错误率。
?当发送时,检测到介质的调整丧失。
如果丧失了一个传输介质,数据将在另一个传输介质中传送,并由系统记录下故障。
4
如果两个传输介质全部丧失,则FIpV网络将重新使两种传输介质生效以传送信息。
如果还是没有消费者能够读取数据,会有一个能发现生产者缺失的敏感机械设备帮助每一个消费者发现它。
发现生产者缺失后,每一个消费者把数据的故障值定义为系统的安全值。
(5)数据的传输有效性
除了cRc校验,传送数据的有效性由数据的状态(刷新状态和敏感状态)来加强。
敏感机制允许消费者的部件FullFIp2芯片控制网络上的FIpV网的存在。
敏感装置的状态由消费者的FIp部件产生。
这个状态用于检测网络上无数据时的超时情况,并通知消费者数据内容已经很长时间没有更新了。
在这种情况下,消费者使用定义为系统安全值的数据故障值。
刷新机制允许生产者的FullFIp2芯片控制数据在发到FIpV网络前已经由应用软件更新了。
这个状态是发送到消费者的数据的特殊信息。
它由消费者读取,并允许应用定义为系统安全值的数据故障值。
(6)FIpV网络地址
每节hxD2型电力机车的各个节点设备的网络地址如表7-1所示。
机箱名称mpu1机车中央控制单元mpu2轴1的牵引控制单元轴2的牵引控制单元轴3的牵引控制单元轴4的牵引控制单元Tcu10111010b十进制00十六进制00FIpV网的地址0和1必须分配给mpuFIpV地址功能备注Tcu2120cTcu2130DTcu2140e5
最后,小编希望文章对您有所帮助,如果有不周到的地方请多谅解,更多相关的文章正在创作中,希望您定期关注。
谢谢支持!。