linux下串口通信设置
07实验七 Linux环境下的串行通信实验

连接驱动器的使能端,使得当RTS设置成高(逻辑1)时,有效RS485驱动器;设置RTS为低 时,使驱动器处于三态,这时候实际上从总线上断开了驱动器,从而允许其他节点可以使 用同一传输线。当使用RTS时,必须确保发送数据前将RTS设置成高,在发送完数据的最 后一位后,将RTS线设成低。。另一种可选方法是自动发送数据控制。这种方法要求特殊 的电路,当数据传输时自动使能或无效驱动器。它减少了软件开销和程序员的潜在错误。
五、基础知识
串行通信 1、基本原理 串行端口的本质功能是作为CPU和串行设备间的编码转换器。当数据从CPU经过串行 端口发送出去时,字节数据转换为串行的位。在接收数据时,串行的位被转换为字节数据。 串口是系统资源的一部分,应用程序要使用串口进行通信,必须在使用之前向操作系统提 出资源申请要求(打开串口),通信完成后必须释放资源(关闭串口)。 2、串口通信的基本任务 (1) 实现数据格式化:因为来自CPU的是普通的并行数据,所以,接口电路应具有实 现不同串行通信方式下的数据格式化的任务。在异步通信方式下,接口自动生成起止式的 帧数据格式。在面向字符的同步方式下,接口要在待传送的数据块前加上同步字符。 (2) 进行串-并转换:串行传送,数据是一位一位串行传送的,而计算机处理数据是 并行数据。所以当数据由计算机送至数据发送器时,首先把串行数据转换为并行数才能送 入计算机处理。因此串并转换是串行接口电路的重要任务。 (3) 控制数据传输速率:串行通信接口电路应具有对数据传输速率——波特率进行选 择和控制的能力。 (4) 进行错误检测:在发送时接口电路对传送的字符数据自动生成奇偶校验位或其他 校验码。在接收时,接口电路检查字符的奇偶校验或其他校验码,确定是否发生传送错误。 (5) 进行TTL与EIA电平转换:CPU和终端均采用TTL电平及正逻辑,它们与EIA采用
Linux下串口通信编程
Linux下串口通信编程一、什么是串口通信?串口通信是指计算机主机与外设之间以及主机系统与主机系统之间数据的串行传送。
使用串口通信时,发送和接收到的每一个字符实际上都是一次一位的传送的,每一位为1或者为0。
二、串口通信的分类串口通信可以分为同步通信和异步通信两类。
同步通信是按照软件识别同步字符来实现数据的发送和接收,异步通信是一种利用字符的再同步技术的通信方式。
2.1 同步通信同步通信是一种连续串行传送数据的通信方式,一次通信只传送一帧信息。
这里的信息帧与异步通信中的字符帧不同,通常含有若干个数据字符。
它们均由同步字符、数据字符和校验字符(CRC)组成。
其中同步字符位于帧开头,用于确认数据字符的开始。
数据字符在同步字符之后,个数没有限制,由所需传输的数据块长度来决定;校验字符有1到2个,用于接收端对接收到的字符序列进行正确性的校验。
同步通信的缺点是要求发送时钟和接收时钟保持严格的同步。
2.2 异步通信异步通信中,数据通常以字符或者字节为单位组成字符帧传送。
字符帧由发送端逐帧发送,通过传输线被接收设备逐帧接收。
发送端和接收端可以由各自的时钟来控制数据的发送和接收,这两个时钟源彼此独立,互不同步。
接收端检测到传输线上发送过来的低电平逻辑"0"(即字符帧起始位)时,确定发送端已开始发送数据,每当接收端收到字符帧中的停止位时,就知道一帧字符已经发送完毕。
在异步通行中有两个比较重要的指标:字符帧格式和波特率。
(1)字符帧,由起始位、数据位、奇偶校验位和停止位组成。
1.起始位:位于字符帧开头,占1位,始终为逻辑0电平,用于向接收设备表示发送端开始发送一帧信息。
2.数据位:紧跟在起始位之后,可以设置为5位、6位、7位、8位,低位在前高位在后。
3.奇偶校验位:位于数据位之后,仅占一位,用于表示串行通信中采用奇校验还是偶校验。
(2)波特率,波特率是每秒钟传送二进制数码的位数,单位是b/s。
异步通信的优点是不需要传送同步脉冲,字符帧长度也不受到限制。
linux串口编程参数配置详解

linux串口编程参数配置详解1.linux串口编程需要的头文件#include <stdio.h> //标准输入输出定义#include <stdlib.h> //标准函数库定义#include <unistd.h> //Unix标准函数定义#include <sys/types.h>#include <sys/stat.h>#include <fcntl.h> //文件控制定义#include <termios.h> //POSIX中断控制定义#include <errno.h> //错误号定义2.打开串口串口位于/dev中,可作为标准文件的形式打开,其中:串口1 /dev/ttyS0串口2 /dev/ttyS1代码如下:int fd;fd = open(“/dev/ttyS0”, O_RDWR);if(fd == -1){Perror(“串口1打开失败!”);}//else//fcntl(fd, F_SETFL, FNDELAY);除了使用O_RDWR标志之外,通常还会使用O_NOCTTY和O_NDELAY这两个标志。
O_NOCTTY:告诉Unix这个程序不想成为“控制终端”控制的程序,不说明这个标志的话,任何输入都会影响你的程序。
O_NDELAY:告诉Unix这个程序不关心DCD信号线状态,即其他端口是否运行,不说明这个标志的话,该程序就会在DCD信号线为低电平时停止。
3.设置波特率最基本的串口设置包括波特率、校验位和停止位设置,且串口设置主要使用termios.h头文件中定义的termios结构,如下:struct termios{tcflag_t c_iflag; //输入模式标志tcflag_t c_oflag; //输出模式标志tcflag_t c_cflag; //控制模式标志tcflag_t c_lflag; //本地模式标志cc_t c_line; //line disciplinecc_t c_cc[NCC]; //control characters}代码如下:int speed_arr[] = { B38400, B19200, B9600, B4800, B2400, B1200, B300, B384 00, B19200, B9600, B4800, B2400, B1200, B300, };int name_arr[] = {38400, 19200, 9600, 4800, 2400, 1200, 300, 38400, 19200, 9 600, 4800, 2400, 1200, 300, };void SetSpeed(int fd, int speed){int i;struct termios Opt; //定义termios结构if(tcgetattr(fd, &Opt) != 0){perror(“tcgetattr fd”);return;}for(i = 0; i < sizeof(speed_arr) / sizeof(int); i++){if(speed == name_arr[i]){tcflush(fd, TCIOFLUSH);cfsetispeed(&Opt, speed_arr[i]);cfsetospeed(&Opt, speed_arr[i]);if(tcsetattr(fd, TCSANOW, &Opt) != 0){perror(“tcsetattr fd”);return;}tcflush(fd, TCIOFLUSH);}}}注意tcsetattr函数中使用的标志:TCSANOW:立即执行而不等待数据发送或者接受完成。
linux 串口 非标准波特率

在Linux中,串口通信通常使用termios结构体来配置串口参数,包括波特率等。
要设置非标准的波特率,可以使用以下方法:1. 首先,需要包含头文件`<termios.h>`和`<unistd.h>`。
2. 然后,使用`tcgetattr()`函数获取当前串口属性。
3. 修改`cfsetispeed()`和`cfsetospeed()`函数的参数,分别设置输入和输出波特率。
4. 使用`tcsetattr()`函数更新串口属性。
5. 最后,关闭串口设备。
以下是一个示例代码:```c#include <stdio.h>#include <stdlib.h>#include <string.h>#include <unistd.h>#include <fcntl.h>#include <termios.h>int main() {int fd;struct termios options;// 打开串口设备fd = open("/dev/ttyS0", O_RDWR | O_NOCTTY);if (fd == -1) {perror("open_port: Unable to open /dev/ttyS0 - ");return(-1);}// 获取当前串口属性tcgetattr(fd, &options);// 设置非标准波特率(例如:9600)cfsetispeed(&options, B9600);cfsetospeed(&options, B9600);// 更新串口属性tcsetattr(fd, TCSANOW, &options);// 关闭串口设备close(fd);return 0;}```注意:请根据实际情况修改串口设备名称(如`/dev/ttyS0`)和波特率(如`B9600`)。
linux 串口初始化程序实例

linux 串口初始化程序实例Linux 串口初始化程序实例在Linux系统中,串口是一种常见的通信接口,用于连接计算机与外部设备,实现数据的传输和通信。
本文将介绍一个基于Linux系统的串口初始化程序实例,帮助读者了解如何在Linux系统中进行串口的初始化配置。
我们需要打开终端并登录到Linux系统。
然后,通过以下命令查看系统中可用的串口设备:```ls /dev/ttyS*```该命令将列出系统中所有的串口设备,例如/dev/ttyS0、/dev/ttyS1等。
根据实际情况,选择需要初始化的串口设备。
接下来,我们需要使用stty命令来配置串口的参数,如波特率、数据位、校验位、停止位等。
例如,假设我们将串口设备设置为波特率9600,数据位8位,无校验位,停止位为1位,可以使用以下命令进行配置:```stty -F /dev/ttyS0 9600 cs8 -parenb -cstopb其中,-F参数指定要配置的串口设备,9600为波特率,cs8为数据位8位,-parenb为无校验位,-cstopb为停止位1位。
配置完成后,我们可以通过以下命令检查串口的参数配置是否正确:```stty -F /dev/ttyS0 -a```该命令将显示串口的当前参数配置,包括波特率、数据位、校验位、停止位等。
接下来,我们可以使用串口设备进行数据的收发。
例如,可以使用cat命令从串口设备读取数据:```cat /dev/ttyS0```该命令将会连续地从串口设备读取数据并输出到终端。
如果需要通过串口发送数据,可以使用echo命令:```echo "Hello, Serial Port!" > /dev/ttyS0该命令将向串口设备发送字符串"Hello, Serial Port!"。
通过以上步骤,我们就完成了Linux系统中串口的初始化配置。
读者可以根据实际需求,对串口的参数进行相应的配置,并使用串口进行数据的收发。
linux下的串口通信原理及编程实例

linux下的串⼝通信原理及编程实例linux下的串⼝通信原理及编程实例⼀、串⼝的基本原理1 串⼝通讯串⼝通讯(Serial Communication),是指外设和计算机间,通过数据信号线、地线等,按位进⾏传输数据的⼀种通讯⽅式。
串⼝是⼀种接⼝标准,它规定了接⼝的电⽓标准,没有规定接⼝插件电缆以及使⽤的协议。
2 串⼝通讯的数据格式 ⼀个字符⼀个字符地传输,每个字符⼀位⼀位地传输,并且传输⼀个字符时,总是以“起始位”开始,以“停⽌位”结束,字符之间没有固定的时间间隔要求。
每⼀个字符的前⾯都有⼀位起始位(低电平),字符本⾝由7位数据位组成,接着字符后⾯是⼀位校验位(检验位可以是奇校验、偶校验或⽆校验位),最后是⼀位或⼀位半或⼆位停⽌位,停⽌位后⾯是不定长的空闲位,停⽌位和空闲位都规定为⾼电平。
实际传输时每⼀位的信号宽度与波特率有关,波特率越⾼,宽度越⼩,在进⾏传输之前,双⽅⼀定要使⽤同⼀个波特率设置。
3 通讯⽅式单⼯模式(Simplex Communication)的数据传输是单向的。
通信双⽅中,⼀⽅固定为发送端,⼀⽅则固定为接收端。
信息只能沿⼀个⽅向传输,使⽤⼀根传输线。
半双⼯模式(Half Duplex)通信使⽤同⼀根传输线,既可以发送数据⼜可以接收数据,但不能同时进⾏发送和接收。
数据传输允许数据在两个⽅向上传输,但是,在任何时刻只能由其中的⼀⽅发送数据,另⼀⽅接收数据。
因此半双⼯模式既可以使⽤⼀条数据线,也可以使⽤两条数据线。
半双⼯通信中每端需有⼀个收发切换电⼦开关,通过切换来决定数据向哪个⽅向传输。
因为有切换,所以会产⽣时间延迟,信息传输效率低些。
全双⼯模式(Full Duplex)通信允许数据同时在两个⽅向上传输。
因此,全双⼯通信是两个单⼯通信⽅式的结合,它要求发送设备和接收设备都有独⽴的接收和发送能⼒。
在全双⼯模式中,每⼀端都有发送器和接收器,有两条传输线,信息传输效率⾼。
显然,在其它参数都⼀样的情况下,全双⼯⽐半双⼯传输速度要快,效率要⾼。
Linux串口通信编程
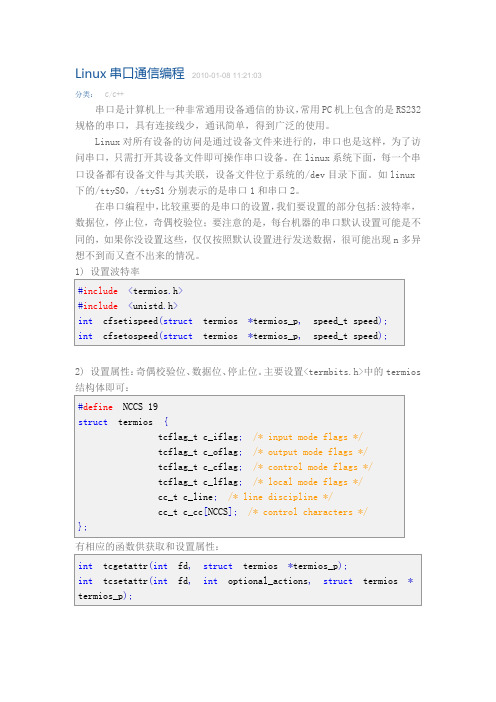
2) 设置属性:奇偶校验位、数据位、停止位。
主要设置<termbits.h>中的termios3) 打开、关闭和读写串口。
串口作为设备文件,可以直接用文件描述符来进行网上的一个例子:/*串口设备无论是在工控领域,还是在嵌入式设备领域,应用都非常广泛。
而串口编程也就显得必不可少。
偶然的一次机会,需要使用串口,而且操作系统还要求是Linux,因此,趁着这次机会,综合别人的代码,进行了一次整理和封装。
具体的封装格式为C代码,这样做是为了很好的移植性,使它可以在C和C++环境下,都可以编译和使用。
代码的头文件如下: *//////////////////////////////////////////////////////////////////// //////////////filename:stty.h#ifndef__STTY_H__#define__STTY_H__//包含头文件#include<stdio.h>#include<stdlib.h>#include<unistd.h>#include<sys/types.h>#include<sys/stat.h>#include<fcntl.h>#include<termios.h>#include<errno.h>#include<pthread.h>//// 串口设备信息结构typedef struct tty_info_t{int fd;// 串口设备IDpthread_mutex_t mt;// 线程同步互斥对象char name[24];// 串口设备名称,例:"/dev/ttyS0"struct termios ntm;// 新的串口设备选项struct termios otm;// 旧的串口设备选项}TTY_INFO;//// 串口操作函数TTY_INFO *readyTTY(int id);int setTTYSpeed(TTY_INFO *ptty,int speed);int setTTYParity(TTY_INFO *ptty,int databits,int parity,int st opbits);int cleanTTY(TTY_INFO *ptty);int sendnTTY(TTY_INFO *ptty,char*pbuf,int size);int recvnTTY(TTY_INFO *ptty,char*pbuf,int size);int lockTTY(TTY_INFO *ptty);int unlockTTY(TTY_INFO *ptty);#endif/*从头文件中的函数定义不难看出,函数的功能,使用过程如下:(1)打开串口设备,调用函数setTTYSpeed();(2)设置串口读写的波特率,调用函数setTTYSpeed();(3)设置串口的属性,包括停止位、校验位、数据位等,调用函数setTTYParity ();(4)向串口写入数据,调用函数sendnTTY();(5)从串口读出数据,调用函数recvnTTY();(6)操作完成后,需要调用函数cleanTTY()来释放申请的串口信息接口;其中,lockTTY()和unlockTTY()是为了能够在多线程中使用。
Linux串口打印设置

一、基于VM虚拟机linux系统串口配置配置分为虚拟机下配置及linux系统下minicom配置两部分。
虚拟机模块配置如下:打开虚拟机配置界面。
选择Edit virtual machine settings。
进入配置界面。
选择Add…按钮,添加相关的设备文件。
选中串口选项后继续选择下一步。
此处选择”使用主机上的物理串口设备”选项,继续下一步。
此处我们选择文件。
对于物理串口选项,此处可以采用自动检测选项。
如果下来菜单中有对应于串口的端口号,则可以选择。
注意,对于设备状态,要确保选中“connect at power on“,即,上电连接状态。
至此,虚拟机端串口配置完毕。
注意:此处我们串口添加成功后默认未COM2.Linux下串口配置及使用。
Linux下一般使用minicom来作为串口数据输入输出的终端。
类似于Windows下的超级终端。
虚拟机下配置完毕后,进入Linux系统中,在Shell 终端下输入minicom -s即可配置串口终端。
配置完成后执行minicom启动串口终端。
在终端界面下完成相关的参数配置并保存后,启动终端设备,即可在minicom中观察到数据输出。
<四>Minicom的使用(1)minicom界面介绍第一次运行minicom,启动minicom要以root权限登录系统,需要进行minicom的设置,输入下了命令#minicom –s,显示的屏幕如下所示,按上下光标键进行上下移动选择,我们要对串行端口进行设置,因此选中Serial port setup,然后回车:__[configuration]─-─—┐//配置│ Filenames and paths │//文件名和路径│ File transfer protocols│//文件传输协议│ Serial port setup │//串行端口设置│ Modem and dialing │//调制解调器和拨号│ Screen and keyboard │//屏幕和键盘│ Save setup as dfl │//设置保存到│ Save setup as.. │//储存设定为│ Exit │//退出│ Exit from Minicom │//退出minicom└──────────┘(2)minicom的参数设置选中设置串行端口,点击回车后,弹出设置的界面如下:点击”A”设置串行设置为/dev/ttyS1,这表示使用串口2(com2),如果是/dev/ttyS1则表示使用串口2(com 2).按”E”键进入设置”bps/par/Bits”(波特率)界面,如下图所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
什么是全双工和半双工?
全双工(Full duplex)是说计算机可以同时接受和发送数据——也就是它有两个分开的数据传输通道(一个传入,一个传出)。
半双工(Half duplex)表示计算机不能同时接受和发送数据,而在某一时刻它只能单一的传送或者接收。这通常意味着,它只有一个数据通道。半双工并不是说RS-232的某些信号不能使用,而是,它通常是使用了有别于RS-232的其他不支持全双工的标准。
RS-232针脚定义
DB-25
针脚
描述
针脚
描述
针脚
描述
针脚
描述
针脚
描述
1
Earth Ground
6
DSR - Data Set Ready
11
Unassigned
16
Secondary RXD
21
Signal Quality Detect
2
TXD - Transmitted Data
7
GND - Logic Ground
RXD - Received Data
RXD于TXD正好相反。它负载着从另一端的电脑或者设备上传到你的工作站的数据。Mark和space的解析方法于TXD一致。
DCD - Data Carrier Detect
DCD信号通常来自串口连结线的另一端。这条信号线上的space电压表示另一端的电脑或者设备现在已经连接。但是,DCD信号线却不是总可以得到的,有些设备上有这条信号线,而有的则没有。
方向(主机外设)
3
TD
Transmit Data
->
2
RD
Receive Data
<-
7
RTS
Request To Send
->
8
CTS
Clear To Send
<-
6
DSR
Data Set Rrminal Ready
->
1
CD
Data Carrier Detect
12
Secondary DCD
17
Receiver Clock
22
Ring Detect
3
RXD - Received Data
8
DCD - Data Carrier Detecter
13
Secondary CTS
18
Unassigned
23
Data Rate Select
4
RTS - Request To Send
9
Reserved
14
Secondary TXD
19
Secondary RTS
24
Transmit Clock
5
CTS - Clear To Send
10
Reserved
15
Transmit Clock
20
DTR - Data Terminal Ready
25
Unassigned
DB-9
针脚
名称
全名
#ref(): File not found: "async.gif" at page "Linux串口编程详解"
那个可选的parity位仅仅是所有传输位的和,这个和用以表示传输字符中有奇数个1还是偶数个1。在偶数parity中,如果有传输字符中有偶数个1,那么parity位被设置成0,而传输字符中有奇数个1,那么parity位被设置成1。在奇数parity中,位设置与此相反。还有一些术语,比如space parity, mark parity和no parity。Space parity是指parity位会一直被设置位0,而mark parity正好与此相反,parity会一直是1。No parity的意思就是根本不会传输parity位。剩余的位叫做stop位。传输字符之间可以有1个,1.5个或者2个stop位,而且,它们的值总是1。传统上,Stop位式用给计算机一些时间处理前面的字符的,但是它只是被用来同步接收数据的计算机和接受的字符。异步数据通常被表示成"8N1","7E1",或者与此类似的形式。这表示“8数据位,no parity和1个stop bit”,还有相应得,“7数据位,even parity和1个stop bit”。
<-
9
RI
Ring Indicator
<-
5
-
Signal Ground
另外两个比较常见的串行接口的标准式RS-422和RS-574。RS-422使用更低的电压和差分信号,这样可以将传输距离扩张到300m。而RS-574定义了通常可以见到的用在电脑上的9针连接器和电压。
↑
信号定义?
RS-232标准定义了18个不同的串行通信的信号。而这些之中,仅仅有如下6个可以在UNIX环境中使用。
Linux串口编程详解
分类:串口2011-07-12 09:21 91人阅读评论(0)收藏举报
串口本身,标准和硬件?
串口是计算机上的串行通讯的物理接口。计算机历史上,串口曾经被广泛用于连接计算机和终端设备和各种外部设备。虽然以太网接口和USB接口也是以一个串行流进行数据传送的,但是串口连接通常特指那些与RS-232标准兼容的硬件或者调制解调器的接口。虽然现在在很多个人计算机上,原来用以连接外部设备的串口已经广泛的被USB和Firewire替代;而原来用以连接网络的串口则被以太网替代,还有用以连接终端的串口设备则已经被MDA或者VGA取而代之。但是,一方面因为串口本身造价便宜技术成熟,另一方面因为串口的控制台功能RS-232标准高度标准化并且非常普及,所以直到现在它仍然被广泛应用到各种设备上。某些计算机使用一个叫做UART的集成电路来作为串口设备。这个集成电路可以进行字符和异步串行通讯序列之间的转换,并且可以自动地处理数据的时序。而某些低端设备则会让CPU直接通过输出针来传送数据,这种技术叫做bit-banging。因为“串口”,RS-232和UARTs基本上总是在同一个语境中出现,所以这些名词通常会被搞混。下面逐一解释以下一些重要的名词和术语。
RTS - Request To Send
如果RTS信号被设置成space电压,这表示你准备好了一些数据需要传送。和CTS一样,RTS也被用来协调工作站和另一端的电脑或者设备之间的数据流。有些工作站上会一直将这个信号设置位space。
↑
异步通讯?
计算机为了弄懂传给它的串行数据,它需要确定每个字符开始和结束的位置。这通常是用异步串行数据来完成的。
Windows
COM1
COM2
-
Linux
/dev/ttyS0
/dev/ttyS1
/dev/ttyUSB0
↑
打开串口?
因为串口和其他设备一样,在类Unix系统中都是以设备文件的形式存在的,所以,理所当然得你可以使用open(2)系统调用/函数来访问它。但Linux系统中却有一个稍微不方便的地方,那就是普通用户一般不能直接访问设备文件。你可以选择以下方式做一些调整,以便你编写的程序可以访问串口。
↑
什么是流控制?
两个串行接口之间的传输数据流通常需要协调一致才行。这可能是由于用以通信的某个串行接口或者某些存储介质的中间串行通信链路的限制造成的。对于异步数据这里有两个方法做到这一点。
第一种方法通常被叫做“软件”流控制。这种方法采用特殊字符来开始(XON,DC1,八进制数021)或者结束(XOFF,DC3或者八进制数023)数据流。而这些字符都在ASCII中定义好了。虽然这些编码对于传输文本信息非常有用,但是它们却不能被用于在特殊程序中的其他类型的信息。
↑
什么是串行通信?
计算机可以每次传送一个或者多个位(bit)的数据。“串行”指的式每次只传输一位(1bit)数据。当需要通过串行通讯传输一个字(word)的数据时,只能以每次一位的方式接收或者发送。每个位可能是on(1)或者off(0)。很多技术术语中经常用mark表示on,而space表示off。
在异步模式中,除非有字符被传输,否则串行数据线总是处于mark(1)状态。有一个start位会被加入传输字符的各个位之前,在字符本身的位之后会有一个可选的parity位和一个或者多个stop位。Start位总是space(0)并且它会告诉计算机新的串行数据过来了。数据可以随时被送出或者接收,这就是所谓的异步。
↑
什么是RS-232?
RS-232是EIA(Electronic Industries Association)定义的串行通信的电器接口。RS-232事实上有三种(A,B和C),它们分别采用不同的电压来表示on和off。最被广泛使用的是RS-232C,它将mark(on)比特的电压定义为-3V到-12V之间,而将space(off)的电压定义到+3V到+12V之间。虽然RS-232C标准说信号最远被传输8m,但事实上你可以使用它传输更长的距离,直到信号波特率已经小到不行了为止。RS-232的连结线中除去用来传入传出数据的电线,还有一些用来提供时序,状态和握手的电线:
GND - Logic Ground
从技术角度讲,GND不能算是信号。但是没有它其他信号都不能用了。基本上,logic ground有点像一个参考电压,通过它来判断哪个电压表示正哪个电压表示负。
TXD - Transmitted Data
TXD信号负载着从你的电脑或者设备到另一端(比如调制解调器)的数据。Mark范围的电压被解析成1,而space范围电压被解析成0。
↑
用户看到的串口和用户空间的串口编程?
和其他设备一样,Linux也是通过设备文件来提供访问串口的功能。当需要访问串口的时候,你只需要open相应的文件。
↑
串口的设备文件?
Linux系统上一般有一个或者多个串口,而这些串口设备文件名字比较奇怪,如比下面这样