三维云场景的模拟
三维云的建模和绘制
觉形态 特征 获得 云的视觉形状 而不需要模拟 云生成或消散的真
1 引 言
随着计 算机技术ቤተ መጻሕፍቲ ባይዱ飞速发 展 , 云的建模 理论及 其真实感 图 形生成算法 的研究 已成为可视 化技术研究的重要方向之一。因
为云在仿真 、 动画 、 虚拟 战场 、 计算机美术 、 以及 天气 可视化 等领
三维 云 的建 模 和 绘 制
龚 琳 顾大权 袁 媛
。 解 放军 镇 江船 艇 学 院 船 艇 指 挥 系 ( 江苏 镇 江 220 ) 10 3
( 解放 军理 工大学气象学院探测与信息工程系 江苏 南京 2 11 1 ) 10
摘
要
本文对计算机 图形 学中三维云的建模 和绘制技 术进 行 了概述 , 主要介绍 目前 比较典型 的基于个体 生长 的云建模技 术和
基于物理过程 的云建模技术。对基 于个体 生长技术 中比较成功 的粒 子系统模 型 、 变形球模 型、 元模型 、 体 过程纹理 函数模型进行 详 细分析 , 总结 了它们 的成果 与不足 , 并 比较 了它们 的适用 范围, 为研 究三维云可视化技术提供借鉴。 关键词 三维云 粒子系统 变形球 体元 过程纹理
.
o y a d p y ial a e e h oo y a r s n r u g h sc l b s d t c n lg t e e t e s mma ie . h i to sa e a ay e a e n p r ce s se , mea b l v x lv 1 n y p a r d T e man meh d r n lz d b d o at l y t m z s i t- a , o e o . l u , rc d r l e t r s Ha e s mmaie h i a he e n n e ce c h s c mp r d t er s o e o p l a in O f r g r fr n e f r me p o e u a xu e . v u t r d t er c iv me t a d d f in y a o a e h i c p fa p i t . f i ee e c o z i c o en
激光点云三维建模流程
激光点云三维建模流程
激光点云三维建模流程简述如下:
1. 数据采集:采用三维激光扫描仪对目标场景进行多角度、高密度扫描,获取大量空间坐标点数据形成原始点云。
2. 预处理:对原始点云进行拼接融合、去噪、剔除无效点、分类(地面点、建筑物点等)、滤波平滑等处理,提高数据质量。
3. 点云配准:将多个扫描站的数据进行空间配准,确保点云数据在同一坐标系下,构建完整的三维点云模型。
4. 建模阶段:基于预处理后的点云数据,采用专业建模软件(如AutoCAD, Revit, 3D Max等),通过点云插件进行实体建模,包括截取截面、轮廓提取、特征识别、单体化建模等步骤。
5. 后期优化:根据需要进一步细化模型,添加缺失细节,确保模型与实际场景一致,最终生成可用于工程设计、分析或展示的三维模型。
气象数据驱动的三维云增强绘制方法

小型微型计算机系统Journal of Chinese Computer Systems 2021年6月第6期 Vol.42 No. 6 2021气象数据驱动的三维云增强绘制方法秦绪佳,赵铮,柯玲玲,郑红波,马骥(浙江工业大学计算机科学与技术学院,杭州310032)E-mail :z h b@zjut. edu. cn摘要:基于气象数据直接体绘制的方法对三维云进行可视化时,如果使用低精度、少层级的网格数据就会造成模拟数据在垂 直方向上相对稀少,从而导致云面会十分粗糙、渲染效果缺乏真实性.为了解决这个问题,本文提出一种利用纹理噪声引入随机 抖动从而使云面细节丰富、有较强真实感的方法.首先生成3D Perlin噪声纹理并采样,再和气象数据的原始纹理以不同的比例 进行融合.该方法可以让三维云整体有更好的立体感以及更佳的视觉感受.此外,仅仅用数值模拟绘制云虽然已经模拟了光的 反射和吸收,但并未涉及到光的散射效应,所以使用数值模拟绘制出来的云真实感仍旧不够.为了绘制出更具有真实感的三维 云,本文结合C o o k T or ra nc e光照模型和双向反射分布函数(B R D F)对传统光照模型进行改进.此改进模型考虑了材质微平面 对光照的影响,运用到对三维云的可视化中,可以得到真实感较强的三维云仿真效果.关键词:三维云仿真;体绘制;随机扰动;Cook Torrance光照模型;双向反射分布函数中图分类号:T P391 文献标识码:A文章编号=1000-1220(2021 )06-1297*073D Cloud Enhancement Rendering Method Driven by Meteorological DataQIN Xu-jia,ZHAO Zheng,KE Ling-ling,ZHENG Hong-bo,MA Ji(School of Computer Science and Technology .Zhejiang University of Technology .Hangzhou 310032 .China)A bstract:When 3D cloud is visualized based on the method of direct volume rendering of meteorological data,if the grid data with low accuracy and few levels is used,the simulation data will be relatively rare in the vertical direction,resulting in very rough cloud surface and lack of authenticity in rendering effect. In order to solve this problem, this paper proposes a method to introduce random jitter into the texture noise so as to make the cloud surface more detailed and realistic. Firstly,3D Perlin noise texture is generated and sampled,and then fused with the original texture of meteorological data in different proportions. This method can make the three-dimensional cloud as a whole have better stereoscopic sense and better visual perception. In addition, although the reflection and absorption of light have been simulated by using numerical simulation to draw clouds, the scattering effect of light has not been involved, so the sense of reality of clouds drawn by numerical simulation is still insufficient. In order to draw a more realistic 3D cloud,this paper combined Cook Torrance lighting model and bidirectional reflection distribution function ( BRDF) to improve the traditional lighting mcxiel. This improved model takes the effect of material microplane on illumination into consideration, and when applied to the visualization of 3D cloud,the 3D cloud simulation effect with strong sense of reality can be obtained.Key words:3D cloud simulation;volume rendering;random disturbance;cook torrance illumination model;BRDFi引言云可分为三大云族,十大云属,是一种自然现象.它们是 由聚集在空气中的微尘周围的水分子产生的水滴或冰晶散射 产生的.云没有特定的表面,也没有清晰的边界,且晶体结构 时时刻刻都在变化,表面呈现出的透明度也不断在改变.每一 朵云都是不尽相同的,所以对云的可视化也是十分复杂的.现 在存在的一些有不错视觉效果的云仿真方法大多依赖于数学 模型,而这些模型都十分复杂且计算成本相对较高.所以对三 维云景的绘制要达到高效率和高仿真效果是当前计算机图形 学领域面临的一大挑战.对三维云的可视化在很多日常仿真应用中都是不可或缺的.在很多游戏中,尤其是在大型网游中,云仿真技术的水平 对游戏场景的真实感影响极大,真实感较强的云仿真可以使 场景更逼真,用户的体验感也会更好;在飞行视景仿真系统中,云层效果的真实以及良好的实时性也是至关重要的;在气 象研究中,真实的气象数据可以反映真实的天气情况,对气象 的研究、气象的预报等都有极大的意义,云作为气象数据中不 可或缺的一部分,对真实气象数据的深人研究和利用都十分 重要.关于云的外在形态仿真方式主要有体素模拟、基于纹理 噪声、数值模拟、交互式模拟、粒子系统以及云图仿真等方法. 体素模拟方面,Kajiya等人[|]利用体积网格内的密度来表示 云,将数据存在体素中,并开发光的散射方程,利用光线追踪收稿日期:2020>06>01收修改稿日期:2020祝-28基金项目:国家自然科学基金项目(61702455 ,61672妨2,619〇2350)资助;浙江省自然科 学基金项目(LY20P020025)资助.作者简介:秦绪佳,男,1968年生,博士,教授,博士生导师,C C F会员,研究方向为计算机图形学、图像处理;赵铮,女,1997年生,硕士研究生,研究方向为图像处理;柯玲玲,女,1993年生,硕士研究生,研究方向为图像处理;郑红波,女,1977年生,博 士,讲师,研究方向为图像处理、地理信息系统;马骥,男,1985年生,博士,讲师,研究方向为数据可视化.1298小型微型计算机系统2021 年法绘制云景.Harris121提出了一种具有十分逼真效果的交互式 云模拟,通过体素模型进行三维云仿真,得到了极佳的仿真效 果.纹理噪声方面,陈华光等人[3]提出用Perlin噪声建模、指 数函数锐化、H L S颜色模型转换等生成静态云彩图像,然后 用静态云彩方法得到任意长度的云图,最后用V C ++和O p e n G L及纹理映射方法将云彩置人虚拟环境中,产生实时 和逼真的动态云效果;唐勇等人~提出了一种使用多种噪声 混合实时模拟体积云的方法.数值模拟方面,L u k&ov&M e d-vid'o v6等人[5]提出了新的隐式显式(I M E X)有限体积云动 力学数值模拟方案,来实现云动力学的数值模拟;蒋立辉等人[6]提出了一种基于体绘制技术的方法,来改进光照模型以 模拟逼真的三维云场景.交互式模拟方面,Z h e n b a o Liu[7]等 人将云建模、云散射、云渲染等典型方法集成到一个整体方案 中,提出了一种根据实时飞行仿真的要求而定制的交互式云 仿真方案;B o u t h o r s等人[8]提出了一个表示积云形状的模型,储存重叠的准球形粒子的层次结构进行建模.粒子系统方面,Y o n g h u a X i e等人[9]根据云的特征(如颜色、大小、形状),设 计球形粒子系统进行建模,给出这些球形粒子的初始颜色、大 小、形状等属性,实现W R F云数据的建模,再引人光照模型 对建模粒子进行渲染和仿真.程飞等人[1°]简化了云辐射模 型,并用M o d t r a n软件对整个场景的大气透射率和辐射率进 行计算,再通过G P U的并行处理对整个数据进行采样模拟出 大气辐射传输效应,最后通过O G R E的粒子系统模拟出三维 云体.云图仿真方面,申闫春等人[i n首先利用M i c a ps3.0处 理卫星云图提取二维云图像,然后从中提取云的三维信息并 对其进行空间填充,最后利用Billboard算法实现三维立体云 仿真;谢晓方等人n2]以卫星云图原始数据为数据源,从中提 取定位和定标信息,进行坐标和投影变换,生成云图数字高程 模型(D E M)从而实现三维云景仿真.陈国栋等人[13]提出一 种三维矢量场建模方法,采用纹理的空间分布特征通过矢量 积运算建模,并利用流线追踪算法进行可视化操作.想要得到真实性较高的云的颜色就需要模拟其内部的光 照效果.胡香等人[M]提出了一种利用云的多向前方散射特性 建立的体云光照模型,效果逼真,与真云一样具有银色的边 缘.Xiaoyan H u等人提出了一种简单的实时云建模与绘制方法,通过模拟云粒子在二维平面上的投影运动而形成云的 密度,然后使用一种实时近似散射的算法来渲染.但这类模型 忽略光的多向散射,只计算视点方向的外散射,只适用于描述 低散射率的光照效果但不能处理云团等高散射率媒介的光散 射问题.Z he ng w e i S u i等人[|6]认为云是一个收集来自太阳光 的粒子集合,而三维云是用八叉树索引和粒子系统建模的,故 使用散射光模型和广告牌技术来渲染它.开始先使用传统的R a y Casting算法来绘制三维云,为了 提高绘制和渲染的速度,还使用了光栅化求交、提前光线终止 法和G P U加速等方式.因为所使用的网格数据精度不够高、层级较少使得模拟数据在垂直方向上较为稀少,导致云表面 十分粗糙、渲染缺乏真实性.为了改善这些问题,本文在传统 体绘制R a y Casting算法的基础上,生成3D Perlin噪声纹理 并采样,再和气象数据的原始纹理以不同的比例进行融合.用 这样的方式对云表面产生随机扰动,增加所绘制云的真实感. 最后,因为涉及到材质的各向异性,本文还使用了一种结合Cook Torrance光照模型和双向反射分布函数(B R D F)的新的光照模型,以此来模拟光的散射,从而进一步增强仿真效果.2基于G P U的Ray Casting算法绘制三维云由于现在常用的光线投射算法三线性插值运算,需要基 于G P U,会产生一定时延.所以本文利用G P U高效的浮点算 术功能来加快渲染.首先把体数据载人到显存之中,再用一个 与其等大的三维纹理表示,其中和这个三位纹理相对应的集 合对象被称作代理几何.这样可以很好的解决G P U无法直接 访问内存数据的问题.本章中R a y Casting算法的代理几何为 立方体,需要将其先转换映射到三维球体上,最后和光线相交 计算得到采样点位置.2.1气象体数据源及数据格式1) 体数据源气象数据有结构化、规则的网格数据,也有非结构化的散 乱数据.前者是通过天气模型得到的;后者是利用气象观测得 到的真实数据.气象观测指的是研究测量和观测地球大气中 温度、湿度、大气气压、降水、云量等气象.非结构化的气象观 测数据可通过插值、重采样转化成结构化数据.2) 数据格式本文利用通过气象观测得到的真实数据作为研究数据 源.该数据源涉及到相对湿度、降水量、雷达数据等.其中相对 湿度使用的数据集是在不同的压强下每3小时进行一次采样 获得,以〇时为起点,总共获得80个样本•一共有361 x 181 个格点数据,每个格点占据4个字节,存储的是单精度的浮 点数.type 106 T799模式2017年06月04日20时00分200hPa^9对湿度030小时预报(0602) 2017 06 04 20 00 030 2001.000 1.000 0.0 360.0 -90.0 90.0361 18110.00-20.00 110.00 0%%%%%%%%%%%%%%%%%%% 96 % % % 96 96 % % % % % % 0 0 0 0 00000000000000 0 99 99 99 99 99 99 99 99 98 98 98 98 98 97 97 9797 97 96%%%%95 95 95 95 95 94 94 94 94 94 9393 93 93 93 93 93 92 92 92 92 92 92图1相对湿度预报格点数据实例Fig.1A n example of grid data for re la ti ve humidity prediction 图i为本实验所用到的一个相对湿度预报格点数据实 例.前4行为数据头,存储的是数据类型、描述信息、数据采样 的相关信息以及数据经讳度的相关信息等.从第5行开始存 储数据部分,数据按先纬度向后经度的顺序存放.图1中所示 数据是106类数据,该数据的描述信息为“T799模式2017年 06月04日20时00分200h P a相对湿度030小时预报(0602) 该数据是从2017年6月4日20:00开始采样的,并 且在200百帕压强的条件一共采样了 30小时.数据采样从经 度0。
虚拟现实技术中的情景建模与渲染方法(六)
虚拟现实技术中的情景建模与渲染方法虚拟现实技术是一种通过计算机生成的环境,使用户能够与之进行交互的技术。
在虚拟现实技术中,情景建模和渲染是非常重要的环节。
情景建模是指根据虚拟现实的需求,利用计算机生成三维模型来模拟现实世界的场景。
而渲染则是指将模型进行光照处理和视觉效果的加工,使得虚拟场景看起来更加真实。
本文将围绕虚拟现实技术中的情景建模和渲染方法展开讨论。
虚拟现实技术中的情景建模方法情景建模是虚拟现实技术中的关键环节,它直接影响着虚拟环境的真实感和逼真度。
在情景建模中,常用的方法包括多边形建模、体素建模和曲面建模等。
其中,多边形建模是最常见的一种方法,它是通过将物体分解成许多小的多边形来构建模型。
这种方法简单直观,适合于一些简单的场景建模,但对于复杂的场景建模来说,多边形建模的工作量会非常大。
体素建模则是将物体分解成小的立方体来进行建模,这种方法适合于对物体进行精细的分割和处理。
而曲面建模则是通过数学曲面来对物体进行建模,它可以更加精确地表现物体的形状和结构。
除了上述的建模方法外,还有一些新兴的建模技术不断被应用于虚拟现实技术中。
例如,基于深度学习的生成式建模方法,可以通过训练神经网络来生成复杂的三维模型,从而提高建模的效率和质量。
另外,基于点云的建模方法也越来越受到关注,它可以通过对物体表面的点云数据进行处理,来生成真实感强的模型。
虚拟现实技术中的渲染方法渲染是虚拟现实技术中另一个重要的环节,它直接影响着虚拟环境的视觉效果和真实感。
在虚拟现实技术中,常用的渲染方法包括光线追踪、阴影处理和材质贴图等。
光线追踪是一种基于物理光学原理的渲染方法,它可以模拟出真实光线在场景中的传播和反射,从而产生非常逼真的图像。
但光线追踪需要大量的计算资源和时间,对硬件性能要求较高。
阴影处理则是用来模拟光照下的阴影效果,它可以使得虚拟场景看起来更加真实。
材质贴图则是将真实世界的材质贴图应用到虚拟模型上,从而增加模型的真实感。
三维场景中的实时动态云彩绘制方法
摘要:本文一种介绍了在三维虚拟场景中实时绘制动态的云彩方法,在室外场景中云彩是提供三维真实感的重要图素之一,由于云彩变化多端,形状多样,没有规则,完全逼真实时地绘制云彩几乎是不可实现的,常见的云彩绘制方法是使用天空体贴图[1,2],但天空体贴图的绘制方法逼真度较差,云彩缺乏层次感和变化,本文设计了用多层公告板动态模拟云彩的方法,实践中效果较好。
关键词:三维场景,实时动态,云彩绘制,公告板前言云彩是三维室外模拟场景中获得真实感的重要图素,由于云彩的多变,形状无规则,用普通的多边形和粒子系统描述云彩几乎是不可实现的,这样会产生数量巨大的多边形,令PC级别的计算机无法实时绘制,当前常见的云彩绘制方法是使用天空体贴图,天空体贴图实际上将天空简化成矩形体或球形体,人们在地球上看到好像是天空体的内表面,通过将云彩的照片直接贴在天空体的内表面模拟天空效果,能够产生一定逼真度的天空效果,突出优点是天空的模型很简单,可以提供很好的实时性,但由于云彩贴在一个表面上,缺乏距离层次感和云彩之间相对运动感容易被看出是一种平面云彩的效果,对要求较高的场合逼真度欠佳,本文设计的云彩绘制方法从增加云彩的层次感和动态感出发改进了天空体的方法,实际运行中可以看出逼真度有大幅度提高,实时性仍然较好。
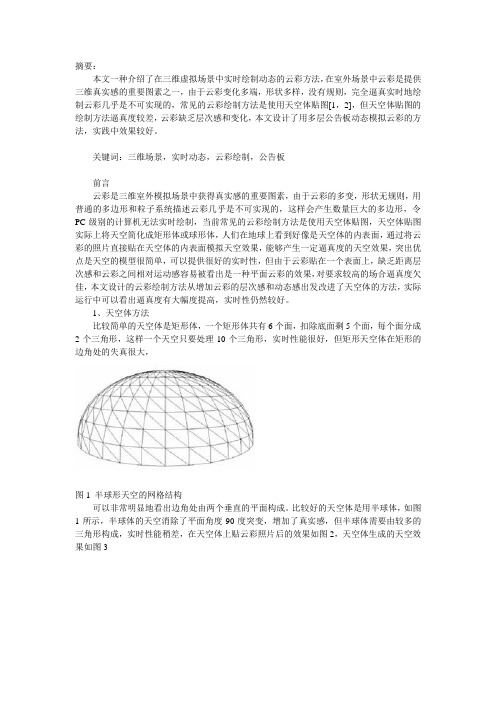
1、天空体方法比较简单的天空体是矩形体,一个矩形体共有6个面,扣除底面剩5个面,每个面分成2个三角形,这样一个天空只要处理10个三角形,实时性能很好,但矩形天空体在矩形的边角处的失真很大,图1 半球形天空的网格结构可以非常明显地看出边角处由两个垂直的平面构成。
比较好的天空体是用半球体,如图1所示,半球体的天空消除了平面角度90度突变,增加了真实感,但半球体需要由较多的三角形构成,实时性能稍差,在天空体上贴云彩照片后的效果如图2,天空体生成的天空效果如图3图2 半球形天空体贴图效果图3 天空体生成的天空效果比较容易看出天空中的云彩好像位于同一个水平面上,天空显得比较薄。
基于激光点云的三维场景建模技术调研

基于激光点云的三维场景建模技术调研1引言随着图形应用技术的飞速发展,二维数据已经无法满足现代信息技术领域应用的需求,三维信息能更加直观地描述真实世界,因此如何快速获取并利用三维信息成为了新的研究目标。
经过不断探索,学者们相继提出通过立体视觉、结构光等多种方法提取三维信息,而激光雷达的出现更是为快速、主动、大量、实时、直接地获得被测目标在三维空间中的立体信息提供了重要的技术支持。
激光雷达是二十世纪六十年代发展起来的一种新兴的探测设备,集成了激光测距技术、计算机技术、三维数字化技术等多项高新技术。
激光雷达通过测量角度、距离等位置信息以直接获得目标物体的三维坐标,从而达到提取三维信息并实现三维重构的目的,是一种新型高效的三维空间信息获取设备。
激光雷达除了在速度和精度上有很大优势,同时采用非接触的方式采集目标对象的表面属性点信息,不会导致物体表面发生形变或损坏,因而它在三维激光扫描领域取得了广泛应用。
激光雷达适用于扫描各种复杂的空间场景,它能完整地采集到真实场景中结构复杂、表面不规则的物体的三维数据,并通过计算机设备对数据进行展示、精简、拼接、重构等处理。
通过激光雷达扫描采集到的离散空间点集呈点状分布,因此被称为点云数据。
虽然点云数据的结构十分简单,但是它却可以精确描述出具有复杂的几何结构和细节的三维模型,而且每一个离散点都存储了丰富的几何信息和物体表面属性,如空间位置坐标、大小、法向量、纹理、透明度等。
近年来,激光雷达在扫描效率、精度、速度及可操作性等方面得到极大的发展,在三维数据的采集速度和精度不断提高的同时,但是采集到的原始点云数据仍存在着各种各样的缺陷,譬如:在实际测量中,环境、振动、人为因素、扫描设备本身存在测量误差致使点云数据常常含有噪声;真实场景的点云数据量庞大,后续处理起来十分困难,需要对点云数据进行压缩简化;由于光的线性传播特性,三维激光扫描设备在同一视角下对于形状复杂的物体通常存在视觉盲区,需要在不同视角下多次测量才能完整采集到模型的三维数据。
飞行仿真中真实感三维云的快速绘制方法
要求 高 , 能完 全 满足 飞行仿 真 的实时 性要 求 。为解决 上述 问题 , 的单 一散 射 出发 , 虑云 和大 气 粒子 引起 的光 衰 减 不 从光 考 率 , 阴影切 片 的方 法分割 体数 据 , 阳照射 方 向上和 视点 观察方 r_ 对切 片 数据 进行 分 析 , 而 快速 绘制 出 真实 感 采用 在太 ht : 从
( . l t ncIfr t nE gneigD pr n , aa A rnu cl n ier gIstt, 1Ee r i noma o n i r eat tN v eo at a E g ei ntu co i e n me l i n n ie
Ya t i 6 0 , a n a 4 01 Ch n ; 2
张 立 民 闰 文君 刘敬 虎 张 晓 军 , , ,
(. 1 海军航 空 工程 学 院 电子 信 息工程 系, 东 烟 台 2 40 ; 山 60 1
2 9 5 7部 队 4 . 16 6分 队 , 浙江 宁波 3 5 2 ) 10 1
摘 要: 近年来提出的云的真实感绘制算法大多采用纹理操作进行绘制, 绘制算法复杂 , 渲染过程较长, 对计算机硬件的
i d. f l s e Ke r s 3 c o d mo e n r a me r n ei g; iu lsmu a in; ol y wo d : D l u d l g;e lt e d rn v s a i lto v ume d t e d rn i i aa r n e i g
A s n e i g M e h d o aitc3 Cl u Fa tRe d rn t o fRe l i D o d s i l h i l to n F i tS mu a in g
OpenGVS中三维云的快速模拟
—
出发 , 过求 解物 体运 动 的物理 方程 , 通 得到 不 同状 态 的
参数来仿真其气象动态变化过程 , 以非常真实地展 可
示 云 形 成 、 动 变 化 的 详 细 过 程 。 K j a和 V n 运 ai y o.
模 型 , 理模 型 和 粒 子 系 统 都 有 着 显 著 的 研 究 成 果 。 物 基 于过程 纹理 的模 型是 考 虑到云 的纹 理 的随机 性 和 自 相似 性 , 根据 随机 过程 理论 , 采用 一 系列有 效 的过 程 迭
仿真 , 只有粒 子 系 统 生 成 的 云与 自然 界 中 的 云在 物 而 理相 似性 , 何 相 似 性 , 照 特 性 上 具 有 极 其 的 相 似 几 光 性, 因此 只有粒 子 系统 方法 比较适 合于 实 时视 景仿 真 。
的、 动的、 运 随机 分 布 的粒 子 组 成 的粒 子 集 , 个粒 子 每
/ 最 小 可视距 离 /
GVU ig s
— —
stp cn d ; eu ( h h 1) / /在 指 定 的通 道 中设 置 无
具有 一 定 的属 性 ( 括 外 观 、 间 位 置 、 动 、 存 属 包 空 运 生 性), 它们不 断运 动 和改变 形状 , 而表 现 景物 总体 的 从
第3卷 8
第 6期
航 空 计 算 技 术
Aeo a t a mp t g T c n q e rn ui l c Co u i e h i u n
VoI3 . . 8 No 6 NO 2 8 V. 0o
20 0 8Leabharlann 1 1月O e G S中三 维 云 的 快 速 模 拟 pn V
基于OGRE的三维红外云仿真
在 计 算 机 图形 学 领 域 ,19 9 1年 L vsu 等 提 eeq e 出了一 种 红外云 天 背景模 拟 的方法 。他 们基 于分形
1 云 的辐 射 模 型
三维 红外 云 的模 拟 不仅是 云体 的模 拟 ,还需 要计
算大 气对 于云 景 的各 种影 响 。云背 景 的辐射 主要 有 云
自身 的热 辐 射 ,太 阳 的直 射 辐 射 ,大 气 对 辐 射 的 衰 减 ,大气 自身 的辐 射和 云体对 于 辐射 的衰减 等 。模 拟
出红 外 云一定 要考 虑到 以下这 些辐 射 的影 响 L=[ + 2 。 d l ]‘ ph ph ( ) ph + l + t 。 u d tl+L 1 1 【
c l b s d a a i aa frltrr s ac . al e u e sb sc d t o ae e e r h
K e wo ds M o ta y r d rn; i rr d co d; p ril y tm ; OGRE f n ae lu atce s se
S m ul to fI r r d 3D o s d o GRE i a i n o nf a e Cl ud Ba e n O
Ch n i Hua g Xi e g Fe , n
( col f eh i l h s s i a n e i ,X’ 10 1 hn ) Sho o T cnc yi ,Xd nU i rt aP c i v sy in70 7 ,C ia a
tn ea d amo p ei a it no ewh l c n r ac ltd u i gM o ta a c n t s h rcr d ai f h oe s e eae c lu ae sn d rn. T e d t ss mp e sn h o o t h aai a ld u i gt ec m—
三维云图仿真系统设计与实现
三维云图仿真系统设计与实现王连杰;韦群【摘要】为了提高云团的观测准确率,提出了利用红外云图夜间能够成像的特点,研究云图中灰度值与云团高度值存在的关系,利用该对应关系构建出云图的三维模型,计算各像素点的顶点法向量,对模型中各个像素点进行着色,最终设计并实现三维云图仿真系统.该系统能够有效解决云图的三维显示问题,极大地提高了云图的真实感,具有很强的实际意义.【期刊名称】《软件》【年(卷),期】2018(039)005【总页数】5页(P151-155)【关键词】计算机应用技术;仿真;红外云图;三维模型【作者】王连杰;韦群【作者单位】航天工程大学,北京 101400;西昌卫星发射中心,四川西昌 615000;航天工程大学,北京 101400【正文语种】中文【中图分类】TP391.90 引言随着卫星遥感技术的不断发展,气象卫星通过搭载的各种气象遥感器,能够从太空进行全方位、全天候观测,观测的内容包括云图的拍摄、云顶温度和水汽、臭氧等内容,这些数据经地面站处理后,可以得到红外云图、水汽图以及可见光云图。
然而,基层台站目前接收的云图数据基本上都是二维云图,用户根据云图的颜色不同,对云图进行分析。
对比三维云图而言,二维云图不能反应云团的垂直分布特征,对台风、低涡等天气系统反应不够直观,真实感较差。
由于云状能够直接反应的大气的活动状态,国内外众多学者开展了云图的三维可视化研究。
主要有申闫春等从二维云图中提取云的三维信息,并利用改进的Billboard算法对其进行空间填充实现三维立体云的仿真[1];Mark J.Harris等人利用前向散射的云阴影算法,在运行过程中利用一阶各向异性散射和帧对帧的相干性加快云的绘制速度,构建出的三维云图仿真算法[2];还有郭胜等利用实时的红外云图数据,在数字地球上采用OGS三维渲染技术,实现云图的三维显示[3]。
前人的众多研究,都为本文奠定了很强的理论基础[4-5]。
本文将采用基层台站接收的红外云图数据,利用OpenGL图形和模型库,研究构建云图的三维模型,设计并实现三维云图仿真系统,该系统将极大的方便岗位人员掌握云团的变化情况,具有很强的现实意义。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
解 放 军 理 工 大 学 学 报( 自 然 科 学 版+ 0 b a e 5 p f b c 9 7 ; i5 ‘ j 4 e ^ ‘ _ hb c k l ‘ 4 5 l 4p 5 x8 4 l n 5 b f b g h
1b f . &ob . , 2l _ . ) # # *
!] % -l u v J B w A H B 5b e x 4 e_ b^ ‘ ya f p _ 4_ n 4f ‘ c 4 f ‘ z 4p 5 xe 4 p f _ ‘ y4 _ n e 4 4x ‘ y4 5 ^ ‘ b 5 p fl f b a x^ l 4 5 4 f b a x {p ^
F < = >? @ A B = C DC E GH @ C ? IJ H K D K
" -) " " " % % L M NLO P Q - L R ST U V T Q- W XN Y P Q- ZR [ P \ P Q
( " .] -9 .b .m 8 . -op " " " # " -r / 5 ^ _ ‘ _ a _ 4b c d4 _ 4 b e b f b g h 7 ; i5 ‘ j c k l ‘ 4 l n 5 q ‘ 5 g) n ‘ 5 p ) .s " ) # # & -r + n 4 5 q ‘ p 5 gtp _ 4 e l e p c _ r b f f 4 g 4b c 9 7 ;-s n 4 5 q ‘ p 5 g) n ‘ 5 p
漫游进行了探讨 ’ 首先利用面向对象的粒子系统模 型 对云进行构建 ( 然后通过简单的光照模型及有效 的 绘制算法实现 了 三 维 云 图 的 可 视 化 ( 并加入天空 背 景的漫游系统 ( 生成云的位置和方向能够随用户 漫 游时视点的变 化 而 变 化 ( 可以从各个角度对云进 行观察 ( 大大提高了虚拟场景的逼真程度 ’ 整个三维 云 场 景模拟系统 分 云 模 型 的 构 建 ) 云的绘制和三维 漫游场景可视化 -个独立的部分 ’
-_ yb x 4 f 4 x| p ^ 4 xb 5_ n 43 p e _ ‘ l f 4^ h ^ _ 4 y.8 n 4e 4 f p _ ‘ b 5 ^ n ‘ 3| 4 _ {4 4 5_ n 43 p e _ ‘ l f 4 ^‘ 5l f b a x n 4^ a 5p 5 x_ n 4
* + ,
< 8$ : 5 3 =类 主 要 描 述 粒 子 在 三 维 空 间 中 的 位 置’ : 9 " # #< 8$ : 5 3 = E (H (I 7 F 9 3 " 5 G J 类简要描述了粒子的一些基本属性 1 < 2 " = 5 4 : 9 $ : 9 " # #< 2 " = 5 4 : 9 $ E (K (: 7 < 8$ : 5 3 = C 3 # $ 9 3 : 4 5 ; 3 9 3 = 7 F 9 3 " 5 = " % 4 ? # 7 F 9 3 " 5 % $ 6 # 4 5 ; 7 L M ? 4 6 5 5 $ A 5 ? = $ 7 F 9 3 " 5 " 9 C D " J 本系统的静态云团外形的生成是通过随机法生 成的 ( 主要思想是首先构造一个几何三维空间 ( 用数 学函 数表示 出该 三 维 空 间 函 数 表 达 式 ( 然后在这个 三维空间内随机地填充粒子 ’ 由于云形状具有随机 性和多变性 ( 随时可能处于变化中 ( 因此引入扰动函 数 对表 示三维 空 间 的 函 数 值 进 行 随 机 扰 动 ( 这样可 以得到比较真实随意的云团效果 ’ 因为云团是静止 的( 某 一云 团绘 制 完 其 内 部 粒 子 间 的 关 系 则 相 对 固 一定程度上提高了系统的运行速度 ’ 定下来 (
.~ p 5 x_ n 423 4 5 6 7 {4 e 4a ^ 4 x_ b4 5 n p 5 l 4_ n 4b 3 4 e p _ ‘ b 5^ 3 4 4 x ‘ 5 p f f h _ n 4e b p y4 x& !^ z h| p l z g e b a 5 x{p ^
效果的三维天空场景是目前计算机图形学领域的一 个难题 0 从 ) 国内外 研究 人 员 #世纪 & #年代末 到现 在 一直在努力探索云的模拟仿真方法 0 对云的模拟仿 真 一般要 考虑 &个因素 ! - 建模 0 根 据 云 的 物 理 特 性或者通过受控的随机过程来生成表示云的模型数 模拟光与云交互作用 包括光的反射 1 折射和散射等 现象 0/ 绘制 0根据生成的模型数据场 采用适当的 绘制方法生成云的图像 0 云的模拟按照几何维数的差异可分为二维模型 和 三 维 模 型0按 照 建 模 原 理 可 分 为 基 于 个 体 生 长
. 云模型的构建
云的粒子系统模型利用的是一种假想的物理模 主要为了方便地模拟云的形态及运动特征 ’ 粒子 型( 系统是一种简单且有效的不规则模糊物体的建模方
/ , 法* ’ 其基本思想是把物体看成是由大量不规则的
随机分布的粒子组成的粒子集 ’ 每个粒子具有一定 的属性 0 包括外观 ) 空间位置 ) 运动 ) 生存属性等 & 它 ( 们 可 以在不断运 动 和 改 变 形 状 中 ( 来表现景物总体 的外形特征和动态的变化规律 ’ 高性能的粒子系统可以真实地模拟出一些虚拟 场景 ’ 在云的粒子系统设计中 ( 为了方便设计和管理 系统中的粒子 ( 采用了面向对象的设计方法 ( 它与面 向对象中类的概念有些类似 ( 可以当成类来处理 ( 每 个粒子即为粒子类的一个实例 ’ 给每个云粒子赋予 的状态属性有 1 粒子当前在空间中的位置 7 ( 2 3 # 4 5 4 3 6 粒子的运动规律0 静 态 云 则 不 考 虑& ( 7 8$ 9 3 : 4 5 ; 粒子颜色的变化 ( 可以产生一些真实的效果 7 ( < 3 9 3 = 粒子的大小 ( 其影响粒子系统的表现效果及 ( > " % 4 ? # 运行的速度 7 粒子纹理 ( 所设置纹理数目会 ( @ $ A 5 ? = $ 对 粒 子系统的性能产生 巨大 的 影 响 7 融合模 ( B9 C D " 式等 ’ 根据云粒子的各种特性 ( 设计了粒子系统的核 心( 即1 粒子系统类 ’ 云粒子的各种属性都封装在该 类中 ’
粒子的散 射则称 之为 多重散 射光照 模型 ’ 把 光对 +
据包括云的外形 1 运动和物理属性的生成 0 . 光照 0
的方法和基于物理过程( ( + % 25 _ b g 4 5 4 _ ‘ l 9 n h ^ ‘ l p f f h
第 R期
龚
琳( 等 1三维云场景的模拟
Q P O
的方法 ’ 基于个体生长的方法主要是利用人 & ! " # $ % 的视觉形态特征获得云的视觉形状而不需要模拟云 这样渲染速度较快 ’ 目 生成或消散的真实物理过程 ( 前比较成功的方法有分形方法 ) 过程纹理函数方法 ) 细胞自动机方法和粒子系统等 ’ 基于物理过程的方 法主要是通过模拟气象上导致云形成的物理过程以 及光与云的交互作模型 ) 基于流体动力学的数 字 模拟和定性模 拟 等 ( 但由于过大的计算需求还不 适应目前图形学仿真的需求 ’ 本文对三维云模型的构建 ) 光照 ) 绘制及场景的
文章编号 !" # # $ % & ’ ’ & ( ) # # * + # , % # ’ $ * % # ,
三维云场景的模拟
龚
-) 琳" - 顾大权 " - 范
茵" - 徐四林 "
解放军理工大学 气象学院 江苏 南京 ) 解放军镇江船艇学院 江苏 镇江 ) ( " . " " " # " /) . " ) # # & +
摘
要 !为了模拟逼真且实时的三维云场景 把云团看成是受太阳光照射的粒子集 采用基于粒子系统的技
术对三维云模型进行构建 0 通过比较云粒子 1 太阳和视点三者的关系 引入光照散射函数对云进行渲染 0 对 现有的多重前向散射光照模型进行了简化和改进 使用纹理映射和 23 4 5 6 7函数进行加速 0 实现了三维天 空背景的实时漫游 0 仿真结果表明 生成的三维云场景既有较好的真实感 又具有良好的实时性 0 关键词 !云 /粒子系统 /光照散射 /虚拟现实 中图分类号 !8 & $ " : $ /9 ’ ) * . , 9 文献标识码 !;
-p l b 5 ^ ‘ x 4 e 4 x_ b| 4pl b f f 4 l _ ‘ b 5b c 3 p e _ ‘ l f 4 ^ l b f f 4 l _ ‘ 5 gf ‘ g n _ c e b y_ n 4^ a 5 5 x_ n 4_ n e 4 4x ‘ y4 5 ^ ‘ b 5 p f l f b a x{p ^ -p .8 j ‘ 4 {3 b ‘ 5 _{p ^l b y3 p e 4 x 5 x_ n 4^ l p _ _ 4 e ‘ 5 g‘ f f a y‘ 5 p _ ‘ b 5yb x 4 f{p ^a ^ 4 x_ be 4 5 x 4 el f b a x n 44 } ‘ _ ‘ 5 g -p ya f _ ‘ 3 f 4c b e {p e x^ l p _ _ 4 e ‘ 5 g‘ f f a y‘ 5 p _ ‘ b 5yb x 4 f ^{4 e 4^ ‘ y3 f ‘ c ‘ 4 xp 5 x‘ y3 e b j 4 x 5 x_ n 4_ 4 } _ a e 4yp 3 3 ‘ 5 g .8 & % . e 4 p f ‘ " 4 x n 4e 4 ^ a f _ ^^ n b {_ n p _ _ n 4j ‘ ^ a p f 4 c c 4 l _ b c !l f b a x^ l 4 5 4‘ ^_ e a 4_ bf ‘ c 4p 5 xe 4 p f _ ‘ y4 !l /3 /j # K $%C w I J f b a x p e _ ‘ l f 4^ h ^ _ 4 y/^ l p _ _ 4 e ‘ 5 g‘ f f a y‘ 5 p _ ‘ b 5 ‘ e _ a p f e 4 p f ‘ _ h 通过计算机模拟进行仿真实验是计算机图形学 技术在军事领域的具体应用之一 0 在虚拟战场环境 中存在十分复杂的自然景象 如雨 1 雪1 云1 雾1 海浪 等0 这些景象对于虚拟场景的 + 沉浸感 , 有很大贡献 0 在各 种 自然景象 的 模 拟 仿 真 中 云的可视化仿真是 其中具有挑战性的研究之一 0 由于真实的云彩环境 会因为天空和气象状况的不同 变得复杂多变 而且 当光线穿过云体时 存在十分复杂的光线反射 1 折射 和散射等现象 0 因此 要模拟出具有逼真且实时云彩