转台控制系统设计要求
简易转台控制系统设计
简易转台控制系统设计
一、任务
转台是一种可以精密测量角度的设备。
设计制作一个简易的转台,目标是控制指针的转动,实现以下几种功能,包含令指针以一定的角速度转动、以一定的频率和幅值做正弦振荡、快速转到指定的角度等。
二、要求
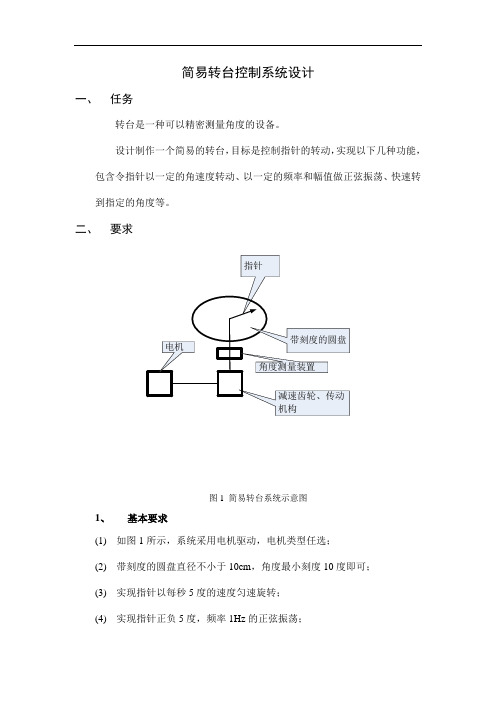
图1 简易转台系统示意图
1、基本要求
(1)如图1所示,系统采用电机驱动,电机类型任选;
(2)带刻度的圆盘直径不小于10cm,角度最小刻度10度即可;
(3)实现指针以每秒5度的速度匀速旋转;
(4)实现指针正负5度,频率1Hz的正弦振荡;
(5)实现指针正负10度,频率0.2Hz的正弦振荡。
2、发挥部分
(1)设置角度测量装置,测角精度至少0.5度;
(2)PID控制是最常用的闭环控制手段,其中P代表比例环节,它能调节整
个系统的增益,如果比例环节数值较大,系统跟踪常值指令时会出现
超调现象。
指针初始位置设置在0度,要求采用PID控制方法,使指
针角度快速变化到30度;
(3)将比例环节参数调大,令系统在完成(2)的过程中出现超调。
三、说明
(1)尽量使用STC公司的最新系列单片机产品。
(2)减速齿轮和传动机构可以省掉不设计,即电机轴可直接带动指针运动;(3)发挥部分(1)的角度显示可用上位机,也可用液晶屏。
四、评分标准。
基于STC12C5410AD的转台控制系统的设计与实现

控 制 系统 中. 仿真 实验 和调 试结 果表 明 , 该控 制 系统具 有 良好 的加减 速 、 定位 、 停控 制 能 力 , 到 了 起 达
设 计要 求.
关键词 :T 1 C 4 0 D; S C 2 5 1 A 目标模 拟 转 台 ; 服控 制 系统 ;I 制 算法 伺 PD控 中图分 类号 :P 7 T 21 文献标 志码 : A
S TC1 5 0AD t o po rc n u 2C 41 wih l w we o s mpt n a d c b n A/D o v r in mo u e wa n r d c d. wo ca s i n a i o c n e so d l si to u e T — ls
V0 . 6 No 12 .1
Fb 2 1 e . O1
文章 编 号 :0 4—17 (0 1 O — 0 9— 3 10 4 8 2 1 ) 1 0 5 0
基 于 S C 2 5 1A T 1 C 4 0 D的
转 台控制 系统 的设计 与实现
吴艳 敏 , 黄 春 , 崔 光 照
a o td i h y tm. e x e i n s s o d t a h y t m a o d a c l rto n e ee ain, d p e n t e s se Th e p rme t h we h t t e s se h d g o c ee ai n a d d c lr to p sto i g a d sa tso o to blt n c iv d t e h ia e u s. o iin n n tr-tp c nr la i y a d a h e e he tc n c lr q e t i Ke r s: TC1 y wo d S 2C5 0AD;a g tsmu a in t r t b e; e v o to y t m ; I c nto l o i 41 tr e i l t u n a l s r o c n rls se P D o r lag rt o hm
转台设计指导书

图 1-5 双轴转台
图 1-6 双轴转台内框结构
3
Байду номын сангаас
图 1-7 双轴转台外框结构
(3) 三轴转台 结构如图 1-8 所示。 图 1-8(a)是立式三轴转台, 图 1-8(b)是卧式三轴转台。
(a) 立式三轴转台 图 1-8 三轴转台
(b) 卧式三轴转台
(4)多轴 由三轴以上组成的转台,结构如图 1-9 所示。
I
第1章 转台总体设计
1.1 转台结构类型选择
转台是一种重要的地面测试设备,用于惯性导航系统和惯性元件检定、标定,以及模拟 飞行器姿态运动。 转台根据用途可分为仿真转台和惯性测试转台。但目前两个类别间互相渗透的趋势愈发 显著, 界限日趋上移,直到中高端产品才区别明显。 惯性测试转台,侧重静态或稳态性能,主要用于惯性导航系统和惯性元件如陀螺、加速 度计的性能检测和标定。先进武器系统一般配备有惯性导航和制导系统, 这类装置在生产、 调试、测评、使用、维护(修)等各个阶段都离不开由惯性测试转台组成的测试系统。因此, 惯 性测试性能的好坏, 直接影响武器系统研制水平及其性能评定。 仿真转台,侧重动态性能,仿真转台一般用于武器平台或运动载体的运动状态模拟 , 是 各类武器平台进行半实物仿真试验等地面综合性试验系统的关键设备和重要组成部分, 也是 测试、评价和标定各类运动载体、武器系统性能的经济、高效的技术手段。 转台按照不同的分类标准有多种类型。
转台设计 课程设计指导书
哈尔滨工业大学
2011 年 4 月
目 录
第 1 章 转台总体设计 ...............................................................................................
单轴转台伺服控制系统电路设计

关 键 词 : 轴 转 台 :永磁 同步 电机 ; 能 功 率模 块 ; R K 0 单 智 IMC 2 3
中 图分 类 号 : P 9 ; M3 1 T 3 1T 4 文献标识码 : A
3 硬 件 设 计
图 1为 基 于 I M K 0 R C 2 3的 永 磁 同 步 电 机 伺 服 控 制 系 统 结构原理图 。
整 个 系 统 由主 电路 、 制 电路 和 辅 助 电路 组 成 。其 中 主 控
F g S r c u e o h e v o t ls se f rPMS i .1 tu t r ft e s r o c n r y t m o o M
算 、 lr 换 等 闭 环 控 制 所 需 的 所 有 功 能 单 元 . 有 功 能 全 C ak变 所
调节器参数 、 电流 反 馈 范 围 、W M 载 频 等 ) P 和监 视 系统 状 态 。 因 此 , 课 题 将 I MC 2 3作 为 主 控 芯 片 进 行 永 磁 同 步 本 R K0 电机伺服控制系统的硬件和软件设计 。
电路 由 电 源 模 块 、功 率 驱 动 电 路 和 永 磁 同 步 电 机 等 组 成 ; 控 制 电 路 由 T S 2 F 8 2 D P和 I M K 0 M 3 0 2 1 S R C 2 3以及 外 围 电 路 联
三 相 驱 动 电源 输 入 端 V F V F V B与 驱 动 电 源 G D U B、 V B、 WF N
a c u t r n RMC 0 s s r oc n r l ri p o o e h sp p r T e t e h r w r n ot a e a e d sg e a e s tao dI a a K2 3 a e v o t l r p s d i ti a e . h n, h ad a e a d s f r r e in d b s d oe s n w o eP 2 8 7 I M n RMC 0 . nt S 1 6 h P a dI K2 3
转台设计指导书

我们为您定制个性化转台,满足您一切需求
购买转台请发E-mail:wangyi#(#换成@)
第1章 转台总体设计
1.1 转台结构类型选择
转台是一种重要的地面测试设备,用于惯性导航系统和惯性元件检定、标定,以及模拟 飞行器姿态运动。 转台根据用途可分为仿真转台和惯性测试转台。但目前两个类别间互相渗透的趋势愈发 显著, 界限日趋上移,直到中高端产品才区别明显。 惯性测试转台,侧重静态或稳态性能,主要用于惯性导航系统和惯性元件如陀螺、加速 度计的性能检测和标定。先进武器系统一般配备有惯性导航和制导系统, 这类装置在生产、 调试、测评、使用、维护(修)等各个阶段都离不开由惯性测试转台组成的测试系统。因此, 惯 性测试性能的好坏, 直接影响武器系统研制水平及其性能评定。 仿真转台,侧重动态性能,仿真转台一般用于武器平台或运动载体的运动状态模拟 , 是 各类武器平台进行半实物仿真试验等地面综合性试验系统的关键设备和重要组成部分, 也是 测试、评价和标定各类运动载体、武器系统性能的经济、高效的技术手段。 转台按照不同的分类标准有多种类型。
购买转台请发E-mail:wangyi#(#换成@)
转台设计 课程设计指导书
哈尔滨工业大学
2011 年 4 月
我们为您定制个性化转台gyi#(#换成@)
目 录
第 1 章 转台总体设计 ....................................................................................................................... 1 1.1 转台结构类型选择 ..................................................................
舞台机械系统设计方案
舞台机械系统设计方案1. 引言本文将详细介绍舞台机械系统设计方案。
舞台机械系统是现代舞台表演的重要组成部分,其作用是提供舞台上演员和表演物件的移动和变化效果。
为了达到良好的舞台效果,舞台机械系统需要具备稳定性、安全性和灵活性。
2. 设计目标舞台机械系统设计的主要目标是实现以下功能:1.演员和舞台道具的准确移动和定位。
2.快速、安全地调整舞台布景。
3.提供符合剧目需求的动态舞台效果。
4.提供舞台灯光、音响等设备的整合。
为了满足这些目标,设计方案将包括机械结构设计、控制系统设计和安全保护措施设计。
3. 机械结构设计舞台机械系统的机械结构设计主要包括舞台、舞台转台、升降台和吊杆等组成部分。
3.1 舞台设计舞台应具备足够的空间容纳演员和表演物件,并具备稳定的承重能力。
舞台地面应采用防滑材料,以保证演员的安全。
此外,舞台的侧面应设计各种固定支架,用于固定灯光、音响等设备。
3.2 转台设计舞台转台用于实现舞台上大型道具、演员的旋转和平移。
转台应具备平稳运行、定位准确的特点。
为了保证转台运行的平稳性,可以采用液压驱动系统,确保转台的加速度和减速度均匀。
3.3 升降台设计升降台用于控制舞台高度的变化,以适应不同剧目的需要。
升降台应具备高度调节精确、运行平稳的特点。
采用液压升降系统可以实现高度的精确控制。
3.4 吊杆设计吊杆用于悬挂灯光、音响等设备,并实现其高度和角度的调整。
吊杆应具备稳定承载能力和灵活调整的特点。
采用电动升降系统和旋转系统可以实现吊杆高度和角度的实时调整。
4. 控制系统设计舞台机械系统的控制系统设计是保证机械结构正常运行和舞台效果准确呈现的关键。
控制系统应实时监测各个机械部件的状态,包括位置、速度和运行状态等,并根据剧目需求进行控制。
主要的控制系统设计方案如下:1.使用PLC控制器进行整个舞台机械系统的协调控制。
2.通过传感器实时监测机械部件的运行状态,并传输数据给控制系统。
3.设计人机界面,提供舞台控制的图形化界面,方便操作员进行控制和监测。
转台计算机伺服控制系统设计
转台计算机伺服控制系统设计飞行仿真转台为高精度的复杂控制系统,是地面半实物仿真的关键设备,用以模拟飞行器在空中的各种动作和姿态,包括偏航、滚转和俯仰,实际上是一种电信号到机械运动的转换设备。
把高精度传感器如陀螺仪、导引头等安装于转台之上,将飞行器在空中的各种姿态的电信号转化为转台的三轴机械转动,以使陀螺仪、导引头等敏感飞机的姿态角运动。
“高频响、超低速、宽调速、高精度”成为仿真转台的主要性能指标和发展方向。
其中,“高频响”反映转台跟踪高频信号的能力强;“超低速”反映系统的低速平稳性好;“宽调速”可提供很宽的调速范围;“高精度”指系统跟踪指令信号的准确程度高。
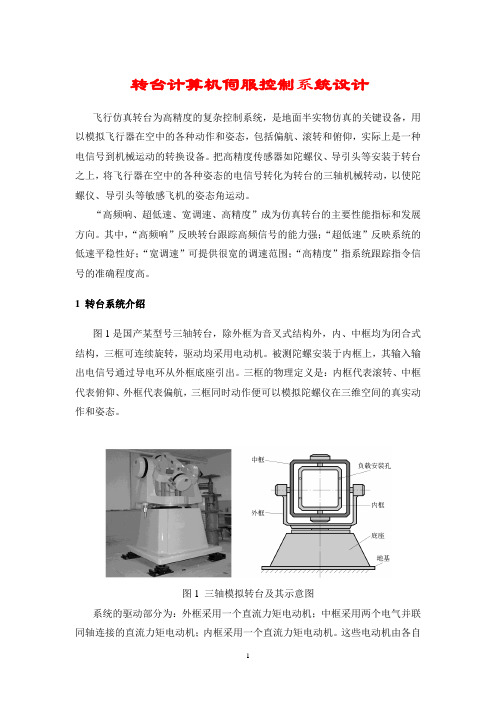
1 转台系统介绍图1是国产某型号三轴转台,除外框为音叉式结构外,内、中框均为闭合式结构,三框可连续旋转,驱动均采用电动机。
被测陀螺安装于内框上,其输入输出电信号通过导电环从外框底座引出。
三框的物理定义是:内框代表滚转、中框代表俯仰、外框代表偏航,三框同时动作便可以模拟陀螺仪在三维空间的真实动作和姿态。
图1 三轴模拟转台及其示意图系统的驱动部分为:外框采用一个直流力矩电动机;中框采用两个电气并联同轴连接的直流力矩电动机;内框采用一个直流力矩电动机。
这些电动机由各自的脉冲调宽放大器(PWM)提供可控直流电源。
三框各有一个测速发电机和一个感应同步器,用以实时检测框架的旋转角速度和角位置。
不同用途的测试转台的对性能指标的要求也不同。
一般转台的主要技术指标包含:静态精度(达到千分之几度)、角速度范围(从千分之几度/秒到几百度/秒)、频率响应要求较宽,并具有一定的负载能力要求,且三个框架都具有最大速率的限制。
2 三轴测试转台的总体控制结构转台三个框架的控制是相互独立的,因此转台的控制系统可以采用如图2所示的原理方案。
该系统为上下位机结构的计算机控制系统。
以一台工控机作上位机,实现对伺服系统的监控、检测和管理。
上位机提供操作者的人机界面,实现对整个转台系统的在线检测、安全保护、性能检测和系统的运动管理以及数据处理。
精密数控分度转台的控制系统设计
仪 表 技ns r n tu nt c ni e n e o
201 0 No. 7
第 7期
精 密数 控 分度 转 台的 控 制 系统 设计
杨继森, 万文略 , 方 燕 , 郑 张天 恒
( 庆 理 工 大 学 机 械 检 测 技 术 与 装 备 教 育部 工 程 研 究 中 心 , 庆 重 重 40 5 ) 00 0
rANG i e , J— n WAN e - e, HEN F n —a ZHANG T a — e g s W nl Z u G a gy n, inh n
( nier gR sac e t f c a i l et gT c n lg n q ime t E gn ei ee rh C ne o h nc s n eh ooya dE up n , n r Me aT i
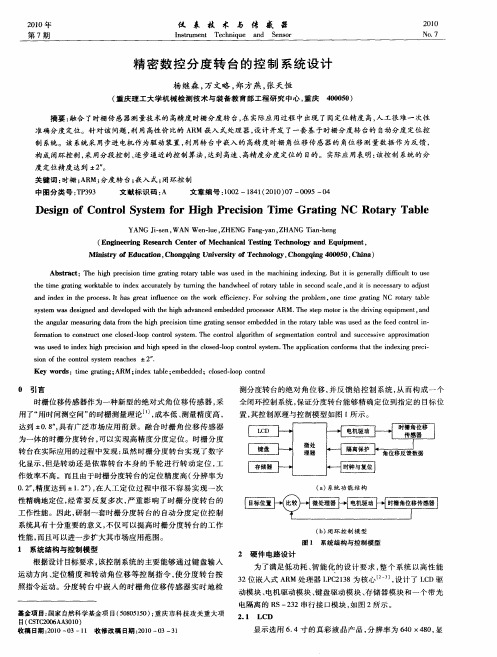
制 系统。该 系统采用步进 电机作为驱动装置 , 利用转 台中嵌入 的高精度 时栅 角位移 传感 器的角位移 测量数据 作为反馈 , 构成闭环控 制, 用分段控制 、 采 逐步逼近 的控制算 法, 达到 高速 、 高精 度分度定位的 目的 。实际应 用表 明: 该控制 系统的分
度 定 位精 度 达 到 ± ” 2。
s se w sd sg e n e e o e i h ih a v n e mb d e r c s o y t m a e in d a d d v lp d w t t e hg d a c d e e d d p o e s r h ARM. h tp moo ed v n q i me t a d T e s t ri t r i ge up n , n e sh i
te i ai oka l t id xa c rt yb r i eh n w el f o r bei sc n cl ,n e esr dut h me t gw r t e o n e c ua l y unn t a d h e o t yt l n e o ds a a di i n csa t a js t g n r b e t gh ra a e ts y O
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
转台控制系统设计要求
1、采用西门子PLC设计转台控制系统。
2、通过控制升降电机的启停、正、反转实现转台的上升和下降(正传上升,反转下降),并且具有上升到位和下降到位的自动停止显示功能。
3、通过控制转台驱动电机的启停、正反转实现转台的连续正传、连续反转、点动正传、点动反转等功能,并且要求这四个功能必须互锁,且能够指示是那种工作状态,,能够显示转台转动角度。
4、转台应该具有急停功能,实现紧急情况下的系统停止功能。
5、撰写设计说明书,包括总体设计方案,元器件的选型,PLC输入输出地址分配,PLC的接线图,电机、电源,变频器等其他元件的接线图,PLC程序梯形图。
6、最后出一张A1图纸,主要是控制系统的电器接线图。
转台驱动电机为交流异步电动机1.5KW,升降电机大概0.55KW左右。
只控制升降电机的启停,正反转。
转台电机通过变频器调速,变频功率可选1.5KW开环矢量型变频器。
制动器装在减速器的输出轴上,为直流24V驱动,额定电流为6.33A,功率200W,因此需要电流10A左右的直流24V电源,给制动器供电,同时给PLC供电。
旋转编码器安装在减速器的输出轴上。
减速器为一轴输入,两轴同速输出型,上面的输出轴接转台,下面的输出轴接旋转编码器,中间通过弹性联轴器连接,调整比较方便。
控制系统的控制对象:
1. 1.5KW变频器,控制转台电机的启动停止以及调速。
调速控制可选变频器的多段速,此时根据段速多少,占用PLC两到三个数字量输出点。
调速控制也可以选择485接口通信控制,此时速度连续可调,由于226的PLC只有两个485接口,这种情况下考虑跟文本显示器共用一个485接口。
同时变频器的启停控制用到PLC的两个数字量输出点。
绝对式旋转编码器用到PLC的10个数字量输入点。
2. 0.55KW的升降电机,控制其启停和正反转。
开关量控制。
占用PLC两个输出点。
上下限位开关占用PLC两个输入点。
3. 制动器的启停。
开关量控制,占用PLC一个输出点。
PLC资源的初步分配:
输入数字量点:
按钮:连续运行,点动,自动对中,设定角度运行,正反装模式选择扭子开关,远程操作与现场操作模式选择扭子开关,升降运动的上下限位开关,编码器的10个输出。
18个输入点。
输出点:变频器正反转2个,正转指示灯,反转指示灯,运行指示灯,对中到位或设定角度到位指示灯,制动器线圈控制,升降电机控制2个。
上下限位指示灯2个。
操作模式指示2个。
共13个输出点。
另外变频器故障指示,和变频器故障复位不需要占用CPU的输入输出,需用2个按钮。
角度设定和当前角度监控,文本显示器。