同济大学理论力学练习册答案-虚位移原理
第11章 虚位移原理—习题(1~17)

第11章 虚位移原理——习题1~1711-1 图示平面机构,圆盘的半径为r ,可绕其中心轴转动,直杆BC 和BD 的长度为l 1 = 2r ,直杆AB 的长度为l 2 = 3r ,试建立图示位置圆盘的虚转角θδ与滑块C 的虚位移C r δ之间的关系。
(题11-1答案:)11-2 在图示平面机构中,O 1A = AB = r ,O 2C = 2r ,BD = 4r ,C 为杆BD 的中点,试建立图示位置杆O 1A 的虚转角1δθ与杆O 2C 的虚转角2δθ之间的关系。
(题11-2答案:)11-3 如图所示曲柄摇杆机构,已知OA = OB = l ,试建立图示位置两杆虚转角之间的关系。
(题11-3答案:)11-4 在图示平面机构中,半径为R = 2r 的四分之一细圆环BD ,其上套一套筒A ,套筒与可绕轴O 转动的直杆OA 铰接,OA 的长度为l = 3r ,试建立图示题11-1图题11-2图位置杆OA 的虚转角与点D 的虚位移之间的关系。
(题11-4答案:)11-5 在如图所示平面机构中,O 1A = O 3C = O 3D = AB = l ,在图示位置,CB = O 2B =l 332,试建立该位置A 、D 两点虚位移之间的关系。
(题11-5答案:)11-6 在图示平面机构中,ABD 为边长等于a 的正三角形平板,O 1B 、O 2D 的杆长也均为a 。
机构在图示位置时,杆OE 与水平线成60◦角,A 、D 、O 2在同一水平线上,O 1B 位于铅垂位置,且OA = a ,试求此瞬时刚体O 1B 与OE 的虚转角之间的关系。
题11-3图题11-4图题11-5图题11-6图(题11-6答案:)11-7 在图示平面四连杆机构中,在杆AB 上垂直地作用有三角形分布载荷,其最大集度为q ,在杆OA 的中点作用有水平向左的主动力F ,且F = ql ,若不计各构件自重和各接触处摩擦,为使系统在图示位置平衡,所需施加的作用于杆BC 上的主动力偶矩M 的值。
《理论力学》第十三章--虚位移试题及答案
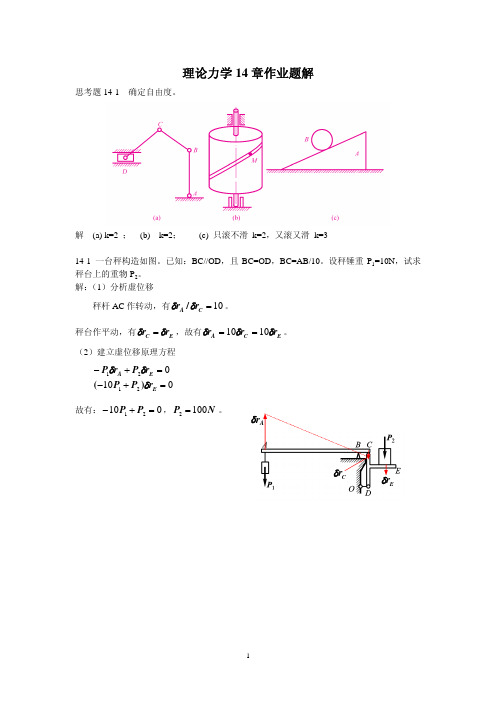
理论力学14章作业题解思考题14-1 确定自由度。
解 (a) k=2 ; (b) k=2; (c) 只滚不滑 k=2,又滚又滑 k=314-1 一台秤构造如图。
已知:BC//OD ,且BC=OD ,BC=AB/10。
设秤锤重P 1=10N ,试求秤台上的重物P 2。
解:(1)分析虚位移 秤杆AC 作转动,有10=C A r r d d /。
秤台作平动,有E C r r d d =,故有E C A r r r d d d 1010==。
(2)建立虚位移原理方程1002121=+-=+-E E A r P P r P r P d d d )(故有:01021=+-P P ,N P 1002=。
Cr d Er14-5 OA=l ,OC=R满足的条件。
解: (用虚位移原理求解)(1) 运动分析(虚位移关系分析)A 处虚位移关系用合成运动的理论分析。
A 为动点,OC 为动系。
r e A r r r r r r d d d +=f d d cos A e r r =另外:R r l r C e /d d = (2) 虚功方程fd f f d d d d cos /)cos /(cos /R l F F r R l F F R r l F r F r F r F C C C A C 21212121000==-=-=-14-9 已知:AC=BC=EC=GC=DE=DG=l ,荷载F 2。
求平衡时的F 1。
解 用解析法,1个自由度,选q 为广义坐标。
建立坐标,如图。
(1) 计算虚位移qdqd q qdq d q sin ,cos cos ,sin l y l y l x l x A A D D 2233-====(2) 计算力的投影 2211F F F F x y -=-= , (3) 建立虚位移原理方程qqdq q q d d sin cos )cos sin (230320212121F F l F l F x F y F D x A y ==×-×=+Oxy14-12 F=4kN, AO=OE=5m. 求D 解:(1) 接触D 处水平约束,代之约束力。
《理论力学》静力学典型习题+答案
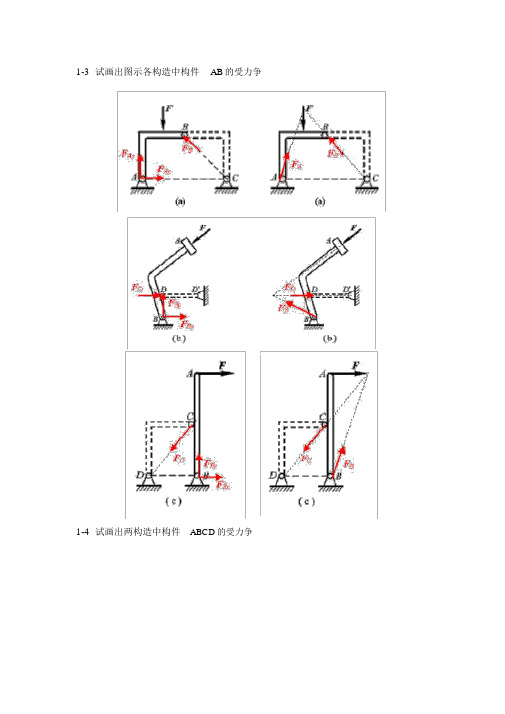
1-3 试画出图示各构造中构件AB的受力争1-4 试画出两构造中构件ABCD的受力争1-5 试画出图 a 和 b 所示刚系统整体各个构件的受力争1-5a1-5b1- 8 在四连杆机构的ABCD的铰链 B 和 C上分别作用有力F1和 F2,机构在图示位置均衡。
试求二力F1和 F2之间的关系。
解:杆 AB,BC, CD为二力杆,受力方向分别沿着各杆端点连线的方向。
解法 1( 分析法 )假定各杆受压,分别选用销钉 B 和 C 为研究对象,受力以下图:yyFBCC xB Fo45BCx30o o F60F2CDF AB F1由共点力系均衡方程,对 B 点有:F x0F2F BC cos4500对 C点有:F x0FBC F1 cos3000解以上二个方程可得:F12 6F2 1.63F23解法 2( 几何法 )分别选用销钉 B 和 C 为研究对象,依据汇交力系均衡条件,作用在 B 和C 点上的力构成关闭的力多边形,以下图。
F F2BCF AB o30o45CD60oFF BC F1对 B 点由几何关系可知:F2F BC cos450对 C 点由几何关系可知:F BC F1 cos300解以上两式可得:F1 1.63F22-3 在图示构造中,二曲杆重不计,曲杆AB 上作用有主动力偶 M。
试求 A 和 C 点处的拘束力。
解: BC为二力杆 ( 受力以下图 ) ,故曲杆 AB 在 B 点处遇到拘束力的方向沿BC 两点连线的方向。
曲杆AB遇到主动力偶M的作用, A 点和 B 点处的拘束力一定构成一个力偶才能使曲杆AB保持均衡。
AB受力以下图,由力偶系作用下刚体的均衡方程有(设力偶逆时针为正):M0 F A10a sin(450 )M 0F A0.354Ma此中:tan 1。
对 BC杆有:F C FB F A0.354M 3aA,C两点拘束力的方向以下图。
2-4解:机构中 AB杆为二力杆,点A,B 出的拘束力方向即可确立。
理论力学第十四章 虚位移原理
面
A
δS A
M
O
δSB
P x
B
三 虚功 作用于质点上的力在其虚位移上所作的功。
δW=Fδr 四、理想约束:
约束反力虚功之和为零的约束。
ΣδWN = ΣNδr = 0
那些约束为理想约束? 回到动能定理里理想约束部分
1、光滑面 N δr
3、固定支座 Y X
Nδr = 0
δr = 0
2、可动支座 N
δr
因为: δrB = δxB = tanϕ δrA δyA
将虚位移间的关系代入虚 功方程,求解可得:
所以,同样可以得到:δrB = δrA ⋅ tanϕ
y A
FA = δrB = tanϕ FB δrA
δ rA vA FA
O
FB ϕ B
x
vB
δ rB
切
δr1
平
面
A
δS A
M
O
δSB
P x
B
质点:δr 质点系:(δr1 ,δr2 ,…,δrn )
说明: 1.对给定瞬时而言(不同位置位移不同). 2.为约束所允许的(不能破坏约束). 3.无限小位移(不是有限位移).
4.任何无限小位移(不只一个;对质点 系来说不只一组).
M(x,y,z)
切
δr1
平
由AB的速度瞬心P可知:
y
vB = PB = tanϕ
vA PA
A
P
于是:δrB = δrA ⋅ tanϕ
δ rA vA FA
O
FB ϕ B
x
vB
δ rB
方法二:坐标变分法
yA = lsinϕ xB = lcosϕ
理论力学教学材料-10虚位移原理

坐标及矢径可表为广义坐标的函数。
xi xi (q1 , q2 ,, qk ) yi yi (q1 , q2 ,, qk ) zi zi (q1 , q2 ,, qk ) ri ri (q1 , q2 ,, qk )
(i 1,2,, n)
14
三、虚位移
1.定义:质点或质点系为约束允许的任何的微小位移,称为 质点或质点系的虚位移。 虚位移可以是线位移,也可以是角位移。通常用变分符 号 表示虚位移。
10
2.广义坐标 通常,n 与 s 很大而k 很小。为了确定质点系的位置,用 适当选择的k 个相互独立的参数,要比用3n个直角坐标和s个 约束方程方便得多。 ①定义:确定质点系位置的独立参数, 称为广义坐标。 例如双锤摆用两个广义坐标 、ψ 表示。 广义坐标的选择不是唯一的。广义坐标可以取线位移(x, y, z, s 等)也可以取角位移(如 , , , 等)。在完整约束 情况下,广义坐标的数目=自由度数目。
17
② 解析法。质点系中各质点的坐标可表示为广义坐标的函数 ( q1,q2,……,qk),广义坐标分别有变分q1 ,q2 , ,qk ,各 质点的虚位移 ri 在直角坐标上的投影可以表示为
xi xi xi xi q1 q 2 q k q1 q2 qk yi yi yi yi q1 q 2 q k q1 q2 qk
约束方程: 2 2 x1 y1 a 2 ( x2 x1 ) 2 ( y 2 y1 ) 2 b 2
两个自由度 取广义坐标,
x1 asin , y1 acos x2 asin bsin , y2 acos bcos
13
一般地,设有由n个质点组成的质点系,具有k个自由 度,取q1、q2、……、qk为其广义坐标,质点系内各质点的
理论力学2虚位移原理

7
2. 解析法 适用于完整、定常、双面约束
例:求A和B两点的虚位移
O
x
解:选1、2为系统的广义坐标,直角坐标原
点选在固定点O,则A、B坐标可表示为:
a
1 A(x1, y1)
x1 a sin1 y1 a cos1
x2 a sin1 b sin2 y2 a cos1 b cos2
y
2 b B(x2, y2)
0
m3 g
i 1
1. 分析主动力作用点的虚位移
2. 求主动力的虚功之和
14
rA
A
rC1
m1 g
M
O
rC2
m2g
rB
BF
解:
W 0
Fr M 0 m3 g B
rA rB rA rB L
FL M (FL M ) 0 0
LF M 0 M L F
15
例: 图示椭圆规机构,连杆A、B长为l,,杆重和摩擦力不计,
0
i 1
广义力及以广义力表示的质系平衡条件
k
Q jq j 0
j 1
广义力
任意点的虚位移与广义坐标虚位移的关系:
xi yi
zi W
xi
q1
yi
q1
zi
q1
n
i 1
q1
xi q2
q1
yi q2
q1
zi q2
r Fi
•
r ri
q2 q2 q2
L L L
n i 1
xi qk
r m2 g
解:根据虚位移原理
2
{Fixxi Fiyyi} 0
x1 l1 cos y1 l1 sin x2 l1 cos l2 cos y2 l1 sin l2 sin
同济大学理论力学 导学16虚位移原理
理论力学导学章虚位移原理第1616章第16章虚位移原理目录1. 内容提要... ... ... ... ... ... ... ... ... ... ... ... (3)2. 基本要求... ... ... ... ... ... ... ... ... ... ... ... (7)3. 典型例题... ... ... ... ... ... ... ... ... ... ... ... (8)4. 补充习题... ... ... ... ... ... ... ... ... ... ... ... (36)1.内容提要1)基本概念虚位移原理是用动力学的解题方法来研究静力学的平衡问题。
(1) 虚位移的概念及计算虚位移不是经过d t时间所发生的真实小位移,而是假想的、约束所允许的微小位移。
(2) 虚位移的计算方法大致可以分为以下两种:a. 虚速度法当时间“冻结”后,虚位移与速度具有相同的几何关系,所以可以利用运动学中研究速度的各种方法。
b. 解析法当质点系的广义坐标一旦确定,就将各质点的坐标表示为广义坐标的函数,然后通过对各质点坐标的变分,得到各质点的虚位移表示广义坐标的变更的关系式。
但必须注意,在应用解析法解题时,质点系中每一个质点都应处于一般位置。
0δ1=⋅∑=i ni i r F r r 0)δδδ(1=++∑=ni i iz i iy i ix z F y F x F (3)虚位移原理的应用几何形式对结构和机构都是适合的,但对机构,用解析法往往比较方便。
解析形式不能应用于处于特殊位置的机构。
应用虚位移原理解题时,对自由度为零的结构,根据题所要求的未知量,一般每次解除一个约束,使系统只有一个自由度,然后应用虚位移原理的几何形式(虚速度法)求解;对处于一般位置的机构,则可应用虚位移的解析形式求解。
虚位移原理的两种表达形式几何形式解析形式广义坐标形式的虚位移原理广义力以广义坐标表示的虚位移就是广义虚位移,与广义虚位移乘积后可以构成虚功的主动力就是广义力。
理论力学-虚位移原理
因此,在虚位移原理中,首先要研究加在质点系上的 各种约束,以及约束所许可的位移的普遍性质。
第六章 虚位移原理
§6-2 约束和约束方程
约束与约束方程 约束的类型
第六章 虚位移原理
§6-2 约束和约束方程
式中xA,yA和xB,yB分别为A,B两点的直角坐标。上述方程表明这四 个坐标并非都独立。可以消去其中的某三个,从而只剩下一个独立坐标,
这一坐标完全确定了此质点系的位置。
以后我们改称系统的位置为位形。
第六章 虚位移原理
§6-2 约束和约束方程
约束实例
曲面
图示质点A在曲面上运动,质点A的约束方程就是曲面 的曲面方程:
z
f (x, y, z) 0
A(x, y, z)
z
y
x
x
y
第六章 虚位移原理
§6-2 约束和约束方程
约束类型
三、约束的类型
按照约束对质点系运动限制的不同情况,可将约束分类如下:
1.完整约束和非完整约束
其约束方程的一般形式为
f j (x1, y1, z1; ...; xn , yn , zn; x1, y1, z1, ...; xn, yn, zn; t) 0
约束类型
第六章 虚位移原理
非完整约束
§6-2 约束和约束方程
约束类型
2.定常约束和非定常约束
● 如果约束方程中不含时间t,这种约束称为定常约束或稳 定约束。
定常约束一般形式为
f j (x1, y1, z1; ...; xn, yn, zn; x1, y1, z1,...; xn, yn, zn;) 0
理论力学_同济大学中国大学mooc课后章节答案期末考试题库2023年
理论力学_同济大学中国大学mooc课后章节答案期末考试题库2023年1.只要平面力偶的力偶矩保持不变,可将力偶的力和力偶臂作相应的改变,而不影响其对刚体的效应。
参考答案:正确2.力可以沿着作用线移动而不改变它对物体的运动效应。
参考答案:错误3.一空间力系,若各力作用线垂直某一固定平面,则其独立的平衡方程最多有3个。
参考答案:正确4.一空间力系,若各力作用线与某一固定直线相交,则其独立的平衡方程最多有5个。
参考答案:正确5.由n个力组成的空间平衡力系,若其中(n-1)个力相交于A点,则另一个力___________________。
参考答案:也一定通过A点;6.在合成运动问题中,静坐标系是被认为固定不动的坐标系,而动坐标系是相对于该静坐标系有运动的坐标系。
参考答案:正确7.系统在某一运动过程中,作用于系统的所有外力的冲量和的方向与系统在此运动过程中______________的方向相同。
参考答案:动量的改变量8.某一平面力系,如其力多边形不封闭,则该力系对任意一点的主矩都不可能为零。
参考答案:错误9.人重P1,车重P2,置于光滑水平地面上,人可在车上运动,系统开始时静止。
则不论人采用何种方式(走,跑)从车头运动到车尾,车的______________________。
参考答案:位移是不变的10.质点系动能的变化等于作用在质点系上全部外力所作的功。
参考答案:错误11.滚阻力偶的转向与物体滚动的转向相反。
参考答案:正确12.质心的加速度只与质点系所受外力的大小和方向有关,而与这些外力是否作用在质心上无关。
参考答案:正确13.在任何情况下,摩擦力的大小总等于摩擦因数与正压力的乘积。
参考答案:错误14.一个力不可能分解为一个力偶;一个力偶也不可能合成为一个力。
参考答案:正确15.若质点系的动量在x方向的分量守恒,则该质点系的质心的速度在x轴上的投影保持为常量。
参考答案:正确16.已知均质滑轮重P0=200N,物块A重P1=200N,B重P2=100N,拉力F2=100N,系统从静止开始运动,任一瞬时图(a)系统的物块A有加速度a1,图(b)系统的物块A有加速度a2,则_________。
《理论力学》练习册答案
《理论力学》练习册答案习题一一、填空:1、在作用于刚体的任意力系中加入或减去一个(平衡)力系,并不改变原来力系对刚体的作用。
2、周围物体对被研究物体的限制称为被研究物体的(约束)。
3、平面一般力系平衡的充分必要的解析条件是力系中的所有各力(在力系平面内任一轴上投影的代数各等于零)以及(各力对力系平面内任一点的力矩的代数和也等于零)。
4、力对物体的作用取决于(大小、方向、作用点)这三个要素。
几何条件。
6、可将作用于刚体上的力沿其作用线滑动到刚体上的另一点而不(改变)它对刚体的作用,这称为刚体上力的可传性。
习题二一、填空1、汇交力系就是所有各力的作用线都(汇交于一点)的力系。
2、平行力系就是所有各力的作用线都(平行)的力系。
3、平面汇交力系可合成为一个合力,此(合力)作用线通过(各力的汇交点)。
几何条件。
5、合力在某轴上的投影等于力系中各力在同一轴上(投影)的代数和。
6、平面汇交力系平衡的必要与充分的解析条件是(力系中各力系平面内任一轴上投影的代数各等于零)。
二、选择1.图示汇交力系的力多边形表示:A。
A 力系的合力等于零B 力系的主矢为RC 力系的合力为RD 力系的主矩不为零三、计算压路机碾子垂W =20KN ,半径R =400mm, 若用水平力P 拉碾子越过高h=80mm 的石坎,问P 应多大?若要使P 为最小,,力P 与水平线夹角应为多大?此时力P 等于多少?解:此题用几何法较简单:(拉过石坎时N A =0)1) 作出力三角形如图示:由图中几何关系: 2)P 沿水平方向: 3) 如图:当P 与N B 垂直时其值最小,此时 KNw 125320=⨯=⨯αsin KN tg w p 154320=⨯=⨯=α5354==-=ααsin ,cos R h RP min=习题三一、填空1、一般情况下,力使物体同时发生移动和转动。
而力偶使物体(单纯的发生转动)。
2、当力偶矩保持不变时,力偶可以在其作用面内(转),不改变它对(刚体)作用。