机械手,夹持器
机械手,夹持器
2.2.1.1夹紧力计算手指加在工件上的夹紧力是设计手部的主要依据,必须对其大小、方向、作用点进行分析、计算。
一般来说,加紧力必须克服工件的重力所产生的静载荷(惯性力或惯性力矩)以使工件保持可靠的加紧状态。
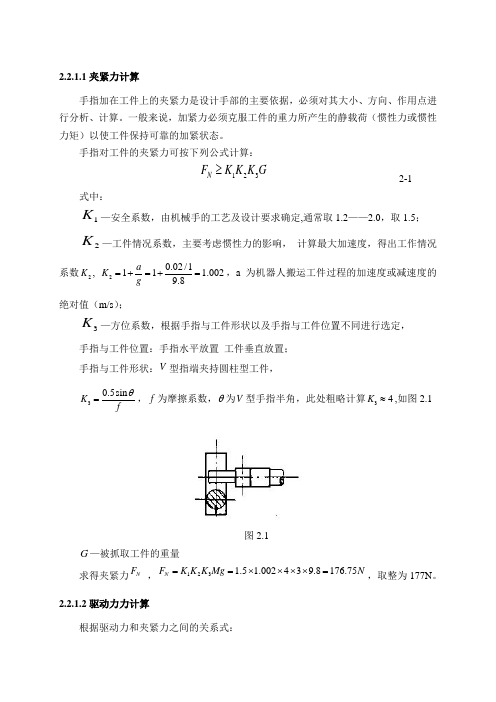
手指对工件的夹紧力可按下列公式计算:123N F K K K G≥ 2-1式中:1K —安全系数,由机械手的工艺及设计要求确定,通常取1.2——2.0,取1.5;2K —工件情况系数,主要考虑惯性力的影响, 计算最大加速度,得出工作情况系数2K , 20.02/111 1.0029.8a K g =+=+=,a 为机器人搬运工件过程的加速度或减速度的绝对值(m/s );3K —方位系数,根据手指与工件形状以及手指与工件位置不同进行选定,手指与工件位置:手指水平放置 工件垂直放置; 手指与工件形状:V 型指端夹持圆柱型工件,30.5sin K fθ=,f 为摩擦系数,θ为V 型手指半角,此处粗略计算34K ≈,如图2.1图2.1G —被抓取工件的重量求得夹紧力NF ,123 1.5 1.002439.8176.75N F K K K Mg N==⨯⨯⨯⨯=,取整为177N 。
2.2.1.2驱动力力计算根据驱动力和夹紧力之间的关系式:2sin N FcF b a=式中:c —滚子至销轴之间的距离; b —爪至销轴之间的距离;a —楔块的倾斜角可得2sin 177286sin16195.1534N F b a F N c ⨯⨯⨯===o,得出F 为理论计算值,实际采取的液压缸驱动力'F 要大于理论计算值,考虑手爪的机械效率η,一般取0.8~0.9,此处取0.88,则:'195.15221.7620.88FF N η=== ,取'500F N = 2.2.1.3液压缸驱动力计算设计方案中压缩弹簧使爪牙张开,故为常开式夹紧装置,液压缸为单作用缸,提供推力:2=4F D p π推式中 D ——活塞直径 d ——活塞杆直径 p ——驱动压力,'FF =推,已知液压缸驱动力'F ,且'50010F N KN =< 由于'10F KN <,故选工作压力P=1MPa据公式计算可得液压缸内径:25.231D mm===根据液压设计手册,见表2.1,圆整后取D=32mm 。
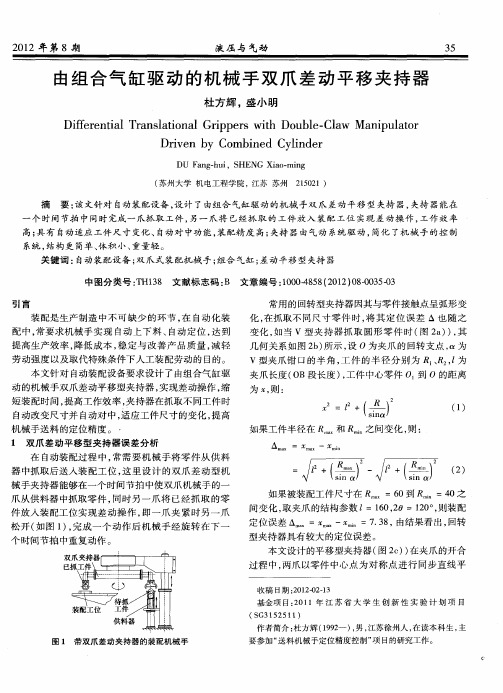
由组合气缸驱动的机械手双爪差动平移夹持器
1
作用 , 当夹持 不 同 的工 件时 , 平移 型夹 持器不 受零 件 尺
寸 变化 的影 响 , 件 中心点 始终在 同一 个位 置 , 机械 零 使 手 在夹 持零 件装 配 时能 自动对 中 、 自动定位 , 论安装 理 定位误 差 为零 , 即机 械手 可 以准确地 将零 件送 到位 , 从 而提 高装 配精 度 , 降低生 产成 本 。
自动改 变尺 寸并 自动对 中 , 应 工件 尺寸 的变 化 , 高 适 提 机 械手送 料 的定 位精 度 。 -
1 双爪 差 动平 移型 夹持 器误 差分 析
z+ 善 1 f ‘
() 1
如 果工 件半 径在 尺 和 R i之 间变化 , : 则
A =
一
m a
件 放 入装 配 工位 实现 差 动 操 作 , 即一 爪 夹 紧 时 另 一爪
=
√ )√ ) “( ( 一
如果 被装 配工 件 尺寸在 R =6 … 0到 R =4 … 0之 间 变化 , 夹爪 的结构 参数 l=10 2 取 6 ,0:10 , 2 。 则装配
松开 ( 图 1 , 如 ) 完成 一 个 动作 后 机 械 手 经 旋 转 在 下 一
个 时i =7 3 , .8 由结果 看 出 , 回转
型夹 持器 具有 较大 的定 位误 差 。
本 文设 计 的平 移 型夹持 器 ( 2 ) 在 夹爪 的开合 图 c)
过程 中 , 两爪 以零件 中心 点 为 对 称 点进 行 同步 直线 平
要参加“ 送料机械手定位精度控制 ” 目的研究工作。 项
3 6
液 压 与 气动
3.1末端执行器(手爪)20121010
喷气式吸盘
当压缩空气刚进入时,由于 喷嘴口逐渐缩小,致使气流 速度逐渐增加。当管路截面 收缩到最小处时,气流速度 达到临界速度,然后喷嘴管 路的截面逐渐增加,使与橡 胶皮碗相连的吸气口处,造 成很高的气流速度而形成负 压。
挤气式吸盘
(2)承托型手爪
承托是将物体放置在托架上,不需要握住,靠自重和托 架的构形,就可使物体定位并搬运到指定位置。
1、按夹持原理分
(1)吸盘式/吸着型 负压吸盘:真空式、喷气式、挤气式。 磁力吸盘:永磁吸盘、电磁吸盘。 (2)承托型手爪 (3)悬挂型手爪 (4)手指式: 外夹式、内撑式、内外夹持式。 平移式、平动式、旋转式。 二指式、多指式。 单关节式、多关节式。
(1)吸着型手爪
吸式执行器是目前应用较多的一种执行器,特别是用于 搬运机器人。该类执行器可分磁吸和气吸两类。
3.1 末端执行器 (手爪)
张建瓴
末端执行器
末端执行器,又称为末端操作器、末端操作手,有时也称 为手部、手爪、机械手等。(机械手、机械臂往往混淆) 机器人的主要功能就是用“手爪”抓取物品,并对它进行 操作。
末端执行器多为形形色色的夹持器, 一般可以开合或吸放。 比如电焊、喷涂等用途的机器人, 其末端执行器即为焊钳和喷具。
末端执行器
末端执行器是装在机器人操作机的机械结口上,用于使 机器人完成作业任务而专门设计的装置。 末端执行器种类繁多,与机器人的用途密切相关,最常 见的有用于抓拿物件的夹持器;用于加工工件的铣刀、 砂轮和激光切割器;用于焊接、喷涂用的焊枪、喷具; 用于质量检测的测量头、传感器。
一般说来,一种新的作业需要一种新的末端执行器,而一 种新的末端执行器的出现又往往为机器人开辟一种新的应 用领域。
UTACH/MIT手爪
夹持式机械手方案设计

夹持式机械手方案设计一、需求背景夹持式机械手在工业自动化领域中发挥着重要的作用。
为满足客户对于夹持式机械手的需求,本文将设计一种夹持式机械手的方案,旨在提高生产效率、降低劳动成本,并同时满足安全可靠的要求。
二、方案设计1. 机械结构设计夹持式机械手的机械结构设计是关键的一环。
我们将采用三段式结构设计,分别为底座、臂和夹具。
底座用于提供机械手的稳定性和支撑力,臂用于实现机械手的柔性运动,夹具用于夹持工件。
机械结构的设计应充分考虑负载能力、运动轨迹和工作范围等因素,以提高机械手的工作效率和稳定性。
2. 控制系统设计控制系统设计是实现夹持式机械手自动化的关键。
我们将采用PLC (可编程逻辑控制器)作为控制核心,通过输入输出模块和传感器实现对机械手的控制与监测。
控制系统设计需要考虑机械手的运动控制、夹持力控制和安全保护等功能,以确保机械手的正常操作和工作安全。
3. 电气系统设计电气系统设计是机械手运行的动力保障。
我们将采用三相交流电作为机械手的供电方式,通过电气控制柜实现对电气元件的控制和保护。
电气系统设计应考虑机械手的供电要求、电源稳定性和电气安全等因素,以确保机械手的稳定运行和安全使用。
4. 软件系统设计软件系统设计是实现机械手智能化的核心。
我们将采用基于编程的方法,编写适应夹持式机械手功能的软件程序,实现机械手的自动化控制和操作。
软件系统设计应充分考虑机械手的运动规划、路径控制和异常处理等功能,以提高机械手的灵活性和智能化水平。
三、方案实施在方案实施过程中,我们将按照以下步骤进行:1. 机械结构的制造和组装:根据设计方案,制造并组装机械手的底座、臂和夹具等组成部分,在此过程中,要确保机械结构的质量和精度,以确保机械手的正常运行。
2. 控制系统的搭建和调试:根据设计方案,搭建PLC控制系统,并通过输入输出模块和传感器与机械手进行连接。
在此过程中,需要进行各个功能模块的调试与联调,确保控制系统的正常工作。
机械手夹持器设计

本科生毕业(设计)论文机械手夹持器设计学士学位论文原创性申明本人郑重申明:所呈交的设计(设计)是本人在指导老师的指导下独立进行研究,所取得的研究成果。
除了文中特别加以标注引用的内容外,本设计(设计)不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究作出重要贡献的个人和集体,均已在文中以明确方式表明。
本人完全意识到本申明的法律后果由本人承担。
学位论文作者签名(手写):签字日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权江西蓝天学院可以将本论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
学位论文作者签名(手写):指导老师签名(手写):签字日期:年月日签字日期:年月日摘要机械手夹持器,它具有夹持物件和剪切缆索的双重功能,适用于有这两种功能需要的机械手,特别适用于水下机械手,可以顺利进行水下作业。
本实用新型是在一种普通的机械手夹持器臂上安装一对能剪切的刀片,当手掌闭合运动时,刀片作剪切运动,达到在夹持的同时完成剪切动作。
本文采用手指式夹持器,执行动作为抓紧—放松所要抓紧的工件直径为60-80mm 放松时的两抓的最大距离为150mm,1s抓紧,夹持速度10-20mm/s;工件的最大重量为5kg,材质为45#钢。
主要研究内容是分析机械手夹持器的原理;确定夹持器与伸缩臂总体方案;完成驱动结构的设计方案;对总体结构设计、主要部件的受力分析和强度校核;对驱动结构设计方案,原理图,整体结构装配图的设计。
关键词:机械手;夹持器;装配图;ABSTRACTThe mechanical arm gripping device, it has a clamping objects and shear cable dual function, applicable to the two functions required mechanical hand, is particularly suitable for underwater manipulator, can smoothly operate under water. The utility model is in a common mechanical hand gripper arm mounted on a pair of cutting blades, when the palm is closed when in motion, the blade shearing movement, achieve in the clamping while completing a shearing action.This paper uses the finger gripper, performing as Clutch - relax to hold the workpiece diameter of60-80mm relaxation time two grasping the maximum distance for150mm,1s clutch, clamping speed 10-20mm / S; the workpiece maximum weight is 5kg, materials for the 45# steel. The main research content is the analysis of manipulator gripper principle; determine the gripper and the telescopic arm to complete the drive scheme; structure design; the overall structure design, the main components of the stress analysis and strength check; to drive structure design, schematic diagram, the overall structure of the design of assembly drawing.Keywords: manipulator; gripper; assembly drawing;目录摘要 (2)ABSTRACT (4)第一章引言 (7)1.1 背景及意义 (7)1.1.1论文选题背景 (7)1.1.2 毕业设计的目的 (7)1.2 毕业设计的内容和要求 (8)第2章夹持器的总体设计 (9)2.1夹持器设计的设计参数 (9)2.2 夹持器夹紧装置设计 (9)2.2.1夹持器夹紧力计算 (9)2.2.2夹持器驱动力力计算 (10)2.2.3夹持器液压缸驱动力计算 (11)2.2.4 夹持器液压缸的选用 (12)2.3夹持器手爪的夹持误差及分析 (13)第3章夹持器腕部的设计 (16)3.1 夹持器腕部设计的基本要求 (16)3.2 自由度的回转缸驱动的典型腕部结构 (16)3.3 腕部结构计算 (17)3.3.1腕部回转力矩的计算 (17)3.3.2回转液压缸所驱动力矩计算 (18)3.3.3回转缸内径D计算 (19)3.3.4液压缸盖螺钉的计算 (20)3.3.5静片和输出轴间的连接螺钉 (21)3.3.6腕部轴承选择 (22)3.3.7材料及连接件,密封件选择 (22)4章夹持器伸缩臂的设计 (24)4.1夹持器伸缩臂设计基本要求 (24)4.2方案设计 (25)4.3夹持器伸缩臂机构结构设计 (26)4.3.1伸缩臂液压缸参数计算 (26)4.3.2导向杆机构设计 (33)第5章夹持器夹持器驱动系统的设计 (36)5.1夹持器驱动系统设计要求 (36)5.2夹持器驱动系统设计方案 (36)5.3夹持器驱动系统设计 (37)5.3.1分功能设计分析 (37)5.3.2液压泵的确定与所需功率计算 (37)5.3.3液压元件的选择 (38)第6章 PLC控制系统 (40)6.1 PLC的构成及工作原理 (40)6.2 PLC选择 (40)6.3程序设计 (41)6.4语句表 (44)总结 (50)参考文献 (51)致谢 (52)第1章引言1.1 背景及意义1.1.1论文选题背景在机械工业中,应用机械手的意义可以概括如下:一、以提高生产过程中的自动化程度应用机械手有利于实现材料的传送、工件的装夹、刀具的更换以及机器的装配等的自动化的程度,从而可以提高劳动生产率和降低生产成本。
夹持器工作原理
夹持器工作原理
夹持器是一种常见的机械装置,它通常被用于在加工过程中夹住工件
以保证其稳定性和准确性。
夹持器的工作原理可以分为两个基本原则:力的传递和力的平衡。
对于力的传递,在夹持器中,通常会有一个夹紧机构和一个夹紧爪,
夹紧机构通过一个操纵杆或一个电动机来产生一个力矩,这个力矩会
传递到夹紧爪上,使其向工件施加一个夹紧力。
通过这个夹紧力,工
件就能被固定在夹持器中,从而避免在加工过程中的运动和震动。
除了力的传递,夹持器还依赖于力的平衡来实现其功能。
在夹持器中,不仅有一个夹紧机构和一个夹紧爪,还有一些其他的部件。
这些部件
通常会形成一个结构,这个结构会使夹持器达到力的平衡状态。
通过
平衡力的大小和方向,夹持器能够保证工件在加工过程中的稳定性和
准确性。
总的来说,夹持器是一种非常重要的机械装置,它能够在加工过程中
保证工件的稳定性和准确性。
其工作原理主要依赖于力的传递和力的
平衡,这些原理使其能够在工业和制造等领域得到广泛应用。
BigHand机械手夹持器使用说明书

BigHand机械手夹持器使用说明书1 产品简介巨鳌(BigHand)机械手夹持器,是最新一代两舵机夹持器,支持单夹持和夹持+手腕旋转两种工作方式。
为描述简便,以下简称手爪。
巨鳌手爪综合了国内外同类手爪的优点,并进行了创造性的改进。
其具有更强的刚性、平行夹持易于定位被夹持物体、支持各种标准尺寸舵机(适合辉盛的MG995、MG996、SG5010等舵机,支持Hitec、Parallax、Futaba、辉盛等品牌的尺寸为40×20×36mm左右的标准舵机)、更大的开距、夹持物体形状的广泛性(可夹方形、圆柱形、球体、锥体等)、可扩展性(两爪面有四个安装孔,可安装薄膜式压力传感器或柔性软垫)等显著特点。
巨鳌手爪采用了混合式材质。
其基体为硬铝合金细沙亚光喷塑材料,舵臂、滑轨、滑块和夹爪采用了加厚和有加强筋构造的进口优质工程塑料,整体强度和刚性很高,造型美观且经久耐用。
未使用增宽器时手爪开距52mm,使用单节增宽器后的手爪开距96mm,分别如图1-1、1-2所示。
并且可以利用多个平板增宽器交错叠成更长的增宽器以进一步扩展手爪开距(建议在150mm以内)。
手爪单重72g(不含电机和增宽器的净重),一对增宽器重28g。
手爪尺寸图如图1-3所示。
图1-1 未使用增宽器的手爪开距图1-2 使用单节增宽器后的手爪开距图1-3 手爪尺寸图2 手爪的安装2.1 安装工具手爪机械部分包含基体和活动体两大部件,以及将机械部分和电机连成整体的必要连接件。
如果您购买的仅是机械部分,那么需要自行配备螺丝刀、尖嘴钳等工具将电机与机械部分连成整体,请按照以下指南进行组装;如果购买的已经是安装了电机的整机,则可略过此部分内容。
2.2 认识手爪部件基体和活动体的结构分别如图2-1、2-2所示,组装机械手爪只需要将基体、活动体和标准舵机连成整体。
需要安装的舵机包括底部负责手腕旋转的舵机(以下简称手腕旋转舵机),以及安装于基体方孔中负责夹持动作的舵机(以下简称夹持舵机)。
夹持式机械手方案设计

夹持式机械手方案设计引言夹持式机械手是一种常用于工业生产线上的自动化设备,它能够精确地夹持工件并移动它们到指定的位置。
本文将介绍夹持式机械手的方案设计,包括机械结构设计、控制系统设计以及安全性考虑等方面。
机械结构设计夹持爪设计夹持爪是夹持式机械手的核心部件,它负责夹持工件并提供足够的力量来保持稳定性。
在夹持爪的设计中,需要考虑以下几个方面: - 夹持力:根据工件的重量和尺寸,确定夹持爪所需的夹持力。
可以通过选择合适的执行器来实现所需的夹持力。
- 可调节性:为了适应不同尺寸的工件,夹持爪应具有可调节的夹持范围。
这可以通过设计可伸缩的爪子来实现。
- 稳定性:夹持爪在夹持工件的过程中需要保持稳定。
因此,可以考虑在夹持爪上加装防滑材料或采用特殊的夹持结构来增加稳定性。
机械臂设计机械臂是夹持式机械手的主体部分,它负责夹持爪的运动和定位。
在机械臂的设计中,需要考虑以下几个方面: - 轴数和自由度:根据具体的应用需求确定机械臂的轴数和自由度。
一般来说,较复杂的任务需要更多的轴数和自由度。
- 结构材料:机械臂应选择强度高、重量轻的材料,以提高机械臂的负载能力和运动速度。
- 运动范围:根据具体的工作空间需求确定机械臂的运动范围。
这需要考虑到工件的尺寸和形状。
- 反馈控制:机械臂上应配备传感器来监测机械臂的运动状态,以实现精确的控制。
常用的传感器包括编码器和力传感器等。
控制系统设计夹持式机械手的控制系统是实现自动化操作的关键,它负责控制机械手的运动和夹持力。
在控制系统的设计中,需要考虑以下几个方面: - 控制算法:选择合适的控制算法来实现机械手的运动和夹持控制。
常用的控制算法包括PID控制和模糊控制等。
- 控制器选择:根据机械手的规模和复杂度选择合适的控制器。
常见的控制器包括PLC(可编程逻辑控制器)和DSP(数字信号处理器)等。
- 通信接口:机械手应具备与上位机或其他设备进行通信的能力。
可以选择合适的通信接口,如RS-232、Ethernet等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.2.1.1夹紧力计算手指加在工件上的夹紧力是设计手部的主要依据,必须对其大小、方向、作用点进行分析、计算。
一般来说,加紧力必须克服工件的重力所产生的静载荷(惯性力或惯性力矩)以使工件保持可靠的加紧状态。
手指对工件的夹紧力可按下列公式计算:123N F K K K G≥ 2-1式中:1K —安全系数,由机械手的工艺及设计要求确定,通常取1.2——2.0,取1.5;2K —工件情况系数,主要考虑惯性力的影响, 计算最大加速度,得出工作情况系数2K , 20.02/111 1.0029.8a K g =+=+=,a 为机器人搬运工件过程的加速度或减速度的绝对值(m/s );3K —方位系数,根据手指与工件形状以及手指与工件位置不同进行选定,手指与工件位置:手指水平放置 工件垂直放置; 手指与工件形状:V 型指端夹持圆柱型工件,30.5sin K fθ=,f 为摩擦系数,θ为V 型手指半角,此处粗略计算34K ≈,如图2.1图2.1G —被抓取工件的重量求得夹紧力NF ,123 1.5 1.002439.8176.75N F K K K Mg N==⨯⨯⨯⨯=,取整为177N 。
2.2.1.2驱动力力计算根据驱动力和夹紧力之间的关系式:2sin N FcF b a=式中:c —滚子至销轴之间的距离; b —爪至销轴之间的距离;a —楔块的倾斜角可得2sin 177286sin16195.1534N F b a F N c ⨯⨯⨯===,得出F 为理论计算值,实际采取的液压缸驱动力'F 要大于理论计算值,考虑手爪的机械效率η,一般取0.8~0.9,此处取0.88,则:'195.15221.7620.88FF N η=== ,取'500F N = 2.2.1.3液压缸驱动力计算设计方案中压缩弹簧使爪牙张开,故为常开式夹紧装置,液压缸为单作用缸,提供推力:2=4F D p π推式中 D ——活塞直径 d ——活塞杆直径 p ——驱动压力,'FF =推,已知液压缸驱动力'F ,且'50010F N KN =< 由于'10F KN <,故选工作压力P=1MPa据公式计算可得液压缸内径:25.231D mm===根据液压设计手册,见表2.1,圆整后取D=32mm 。
表2.1 液压缸的内径系列(JB826-66)(mm )活塞杆直径 d=0.5D=0.5×40mm=16mm活塞厚 B=(0.6~1.0)D 取B=0.8d=0.7×32mm=22.4mm,取23mm. 缸筒长度 L ≤(20~30)D 取L 为123mm活塞行程,当抓取80mm 工件时,即手爪从张开120mm 减小到80mm ,楔快向前移动大约40mm 。
取液压缸行程S=40mm 。
液压缸流量计算: 放松时流量τπSd D Q ⨯-⨯=)(422226121(3216)2060100.724/m i n4q V A V L π-==⨯-⨯⨯⨯=夹紧时流量226111322060100.965/min 44SqV AV D L ππτ-==⨯=⨯⨯⨯⨯=2.2.1.4选用夹持器液压缸温州中冶液压气动有限公司所生产的轻型拉杆液压缸型号为:MOB-B-32-83-FB ,结构简图,外形尺寸及技术参数如下:表2.2夹持器液压缸技术参数图2.2 结构简图图2.3 外形尺寸2.2.3楔块等尺寸的确定楔块进入杠杆手指时的力分析如下:图 2.7上图2.7中θ—斜楔角,θ<30时有增力作用;'2φ—滚子与斜楔面间当量摩擦角,'22tan ()tan d D φφ=,2φ为滚子与转轴间的摩擦角,d 为转轴直径,D 为滚子外径,22tan f φ=,2f 为滚子与转轴间摩擦系数;γ—支点O 至斜面垂线与杠杆的夹角;l —杠杆驱动端杆长;'l —杠杆夹紧端杆长;η—杠杆传动机械效率2.2.3.1斜楔的传动效率斜楔的传动效率η可由下式表示:'2sin =sin()θηθφ+ '22tan tan dDφφ=杠杆传动机械效率η取0.834,2tan φ取0.1,d D 取0.5,则可得θ=14.036,'290φγ<<,取整得θ=14。
2.2.3.3斜楔驱动行程与手指开闭范围当斜楔从松开位置向下移动至夹紧位置时,沿两斜面对称中心线方向的驱动行程为L ,此时对应的杠杆手指由1γ位置转到2γ位置,其驱动行程可用下式表示:1212cos cos (cos cos )sin sin l l lL γγγγθθ-==-杠杆手指夹紧端沿夹紧力方向的位移为:'12[cos()cos()]s l γθγθ∆=+-+通常状态下,2γ在90θ-左右范围内,1γ则由手指需要的开闭范围来确定。
由给定条件可知最大s ∆为55-60mm,最小设定为30mm.即30(5060)s <∆<-。
已知14θ=,可得29076γθ=-=,有图关系:图2.9可知:楔块下边为60mm ,支点O 距中心线30mm ,且有'30()tg l l θ=+,解得:'120l l += 2.2.3.4l 与'l 的确定斜楔传动比i 可由下式表示:''sin sin l l i L l θγ∆⋅==可知θ一定时,'l 愈大,i 愈大,且杠杆手指的转角γ在90γ<范围内增大时,传动比减小,即斜楔等速前进,杠杆手指转速逐渐减小,则由'120l l +=分配距离为:50l =,'70l =。
2.2.3.51γ确定由前式得:(6030)30s ∆=-=13070[cos(14)cos(7614)s γ∆==+-+,150.623γ=,取150γ=。
2.2.3.6L 确定L 为沿斜面对称中心线方向的驱动行程,有下图中关系图2.1050(cos50cos76)82.850sin14L =-=,取83L =,则楔块上边长为18.686,取19mm. 2.2.4材料及连接件选择V 型指与夹持器连接选用圆柱销/119.1GB T ,d=8mm, 需使用2个 杠杆手指中间与外壳连接选用圆柱销/119.1GB T ,d=8mm, 需使用2个 滚子与手指连接选用圆柱销/119.1GB T ,d=6mm, 需使用2个 以上材料均为钢,无淬火和表面处理楔块与活塞杆采用螺纹连接,基本尺寸为公称直径12mm ,螺距p=1,旋合长度为10mm 。
第三章腕部3.1腕部设计的基本要求手腕部件设置在手部和臂部之间,它的作用主要是在臂部运动的基础上进一步改变或调整手部在空间的方位,以扩大机械手的动作范围,并使机械手变得更灵巧,适应性更强。
手腕部件具有独立的自由度,此设计中要求有绕中轴的回转运动。
(1)力求结构紧凑、重量轻腕部处于手臂的最前端,它连同手部的静、动载荷均由臂部承担。
显然,腕部的结构、重量和动力载荷,直接影响着臂部的结构、重量和运转性能。
因此,在腕部设计时,必须力求结构紧凑,重量轻。
(2)结构考虑,合理布局腕部作为机械手的执行机构,又承担连接和支撑作用,除保证力和运动的要求外,要有足够的强度、刚度外,还应综合考虑,合理布局,解决好腕部与臂部和手部的连接。
(3)必须考虑工作条件对于本设计,机械手的工作条件是在工作场合中搬运加工的棒料,因此不太受环境影响,没有处在高温和腐蚀性的工作介质中,所以对机械手的腕部没有太多不利因素。
3.2具有一个自由度的回转缸驱动的典型腕部结构如图3.1所示,采用一个回转液压缸,实现腕部的旋转运动。
从A—A剖视图上可以看到,回转叶片(简称动片)用螺钉,销钉和转轴10连接在一起,定片8则和缸体9连接。
压力油分别由油孔5.7进出油腔,实现手部12的旋转。
旋转角的极限值由动,静。
腕部旋转位置控片之间允许回转的角度来决定(一般小于270),图中缸可回转90制问题,可采用机械挡块定位。
当要求任意点定位时,可采用位置检测元件(如本例为电位器,其轴安装在件1左端面的小孔)对所需位置进行检测并加以反馈控制。
图3.1图示手部的开闭动作采用单作用液压缸,只需一个油管。
通向手部驱动液压缸的油管是从回转中心通过,腕部回转时,油路认可保证畅通,这种布置可使油管既不外露,又不受扭转。
腕部用来和臂部连接,三根油管(一根供手部油管,两根供腕部回转液压缸)由手臂内通过并经腕架分别进入回转液压缸和手部驱动液压缸。
本设计要求手腕回转0180,综合以上的分析考虑到各种因素,腕部结构选择具有一个自由度的回转驱动腕部结构,采用液压驱动,参考上图典型结构。
3.3腕部结构计算 3.3.1腕部回转力矩的计算腕部回转时,需要克服的阻力有: (1)腕部回转支承处的摩擦力矩M 摩1212=()2R R fM F D F D 摩式中1R F ,2R F —轴承处支反力(N ),可由静力平衡方程求得;1D ,2D —轴承的直径(m );f —轴承的摩擦系数,对于滚动轴承f =0.01-0.02;对于滑动轴承f =0.1。
为简化计算,取0.1M M =摩总阻力矩,如图3.1所示,其中,1G 为工件重量,2G 为手部重量,3G 为手腕转动件重量。
图3.1(2)克服由于工件重心偏置所需的力矩M 偏1=M G e偏式中 e —工件重心到手腕回转轴线的垂直距离()m ,已知e=10mm. 则1=39.80.010.294M G eN m N m=⨯⨯⋅=⋅偏(3)克服启动惯性所需的力矩M 惯启动过程近似等加速运动,根据手腕回转的角速度ω及启动过程转过的角度φ启按下式计算:=M t ω惯工件启(J+J )式中工件J —工件对手腕回转轴线的转动惯量2()N m s ⋅⋅; J —手腕回转部分对腕部回转轴线的转动惯量2()N m s ⋅⋅;ω—手腕回转过程的角速度(1)s ;t 启—启动过程所需的时间()s ,一般取0.05-0.3s,此处取0.1s.。
手抓、手抓驱动液压缸及回转液压缸转动件等效为一个圆柱体,高为200mm ,直径90mm ,其重力估算:230.0450.278009.897.26G Kg m N Kg N π=⨯⨯⨯⨯=,取98N.等效圆柱体的转动惯量:222111980.0450.01012229.8G J M R R g===⋅⋅=工件的转动惯量,已知圆柱体工件40R mm =,100l mm =22221=(3)3(30.040.1)0.00371212m J R l +=⋅⋅⨯+=工件要求工件在0.5s 内旋转90度, ω取平均角速度,即ω=π,代入得:=(0.01010.0037)0.43350.1M N m N m t ωπ=+⋅=⋅惯工件启(J+J )=0.10.2940.4335M M M M M N m=++++⋅总阻力矩摩偏惯总阻力矩解可得:M 总阻力矩=0.8083N m ⋅3.3.2回转液压缸所驱动力矩计算回转液压缸所产生的驱动力矩必须大于总的阻力矩M 总如图3.3,定片1与缸体2固连,动片3与转轴5固连,当a, b 口分别进出油时,动片带动转轴回转,达到手腕回转的目的。