四轮转向汽车动力学建模
基于ADAMS软件的汽车四轮转向动力学研究

基于ADAMS 软件的汽车四轮转向动力学研究陈广彦,薛继超,张伯俊天津工程师范学院汽车工程系,天津(300222)摘 要:利用机械系统动力学仿真分析软件ADAMS 建立了一种新设计的四轮转向(4WS)汽车的整车虚拟样机模型。
通过控制前、后轮转角的输入实现前轮转向与四轮转向,并进行虚拟样机仿真。
分析比较汽车四轮转向与前轮转向的主要瞬态动力学特性,结果表明四轮转向汽车操纵稳定性优于前轮转向汽车。
关键词:ADAMS ,虚拟样机,四轮转向,瞬态,操纵稳定性操纵稳定性是汽车的重要性能之 一,四轮转向汽车有很好的操纵稳定性。
四轮转向(Four Wheel Steering ,简称4WS )的基本原理是,利用车辆行驶中的某些信息来控制后轮的转角输入,以提高车辆的操纵性和稳定性。
一般来讲,4WS 系统有两个优点[1]:1)并列停车等低速行驶时可以减小转弯半径;2)在变更路线或回避障碍物等高速行驶时的操纵稳定响应好,提高了安全性。
本文应用美国MSC 公司的ADAMS (ADAMS/VIEW 模块)软件建立某新设计汽车整车多体动力学仿真模型,通过控制前、后轮转角输入实现前轮及四轮转向,这样就可以比较二者对操纵稳定性的影响。
1 车辆多体虚拟样机模型的建立1.1 多体动力学方程的建立ADAMS 利用带拉格朗日乘子的第一类拉格朗日方程导出—最大数量坐标的微分-代数方程(DAE )[2]。
它选取系统内每个刚体质心在惯性参考系中的三个直角坐标和确定刚体方位的三个欧拉角作为笛卡儿广义坐标,用带乘子的拉格朗日第一类方程处理具有多余坐标的完整约束系统或非完整约束系统,导出以笛卡儿广义坐标为变量的动力学方程: Q q T q T dtd TqT q TT=++⎟⎟⎠⎞⎜⎜⎝⎛∂∂−⎟⎟⎠⎞⎜⎜⎝⎛∂∂µθρϕ&& (1) 完整约束方程0),(=t q ϕ (2)非完整约束方程()0,,=t q q &θ (3)其中,T 为系统动能;Q 为广义力列阵;ρ为对应于完整约束的拉氏乘子列阵;μ为对应于非完整约束的拉氏乘子列阵。
基于Simulink的四轮转向汽车神经网络控制策略仿真
万方数据趋向非线性,转向时的侧倾运动也不容忽视,故而,基于线性二自由度汽车模型得出的四轮转向控制规律不能适应汽车的实际状况.文中考虑了侧倾对汽车的影响,建立了三自由度四轮转向汽车模型,运用Simulink进行了分析,得出该汽车模型的控制特性.在此基础上,运用BP神经网络方法训练得到了四轮转向汽车控制器,并将其和汽车模型一起在Simulink中仿真.1三自由度四轮转向汽车动力学模型包含侧向、横摆、侧倾运动的线性三自由度四轮转向汽车模型的运动微分方程‘31:mu(口+r)一m。
鄙=砖(卢+詈一岛一Rr咖)+后,(p—brH一6,一Rr4,)(1)ti—k吊=。
k,(/3+arM一&一月r咖)一bkr(fl—br“一艿,一尺,咖)(2)厶‘|I—Li—m。
矗u(口+r)=m。
ghq,一后击咖一c,6(3)式中m为整车质量;m。
为簧载质量;a,b为质心至前后轴距离;h为侧倾力臂;Ix为簧载质量绕戈轴的转动惯量;t为整车绕z轴的转动惯量;乞为惯性积;k,,矗,分别为前、后轴综合侧偏刚度;k。
为前、后悬架侧倾角刚度之和;C小为前、后悬架侧倾角阻尼之和;咖为车身侧倾角;r为横摆角速度;u为纵向速度;卢为质心处侧偏角;,国,6,分别为汽车前、后轮转角;R,,R,分别为前、后轮侧倾转偏系数.考虑轮胎侧偏特性的非线性因素,文中引入由郭孔辉院士提出的轮胎统一模型的侧偏力模型H】:巧=1一exp(一日一E0:一(E2+丧)矿)(4)其中r等㈩h老式中参数E为曲率因子;“为轮胎侧偏角;墨为侧偏刚度;p,为侧向摩擦系数;Z为垂直载荷;Fy为侧偏力.2四轮转向汽车神经网络控制器设计四轮转向控制目标…:汽车中高速行驶情况下,小转角时,保持汽车的质心处侧偏角为0;大转角时,能够控制后轮转向角度而抗侧滑,保持行车的稳定性;汽车低速行驶情况下,在机构允许的范围内具备最大的机动性.在Simulink环境下建立四轮转向汽车模型,汽车参数见表1.表1汽车参数Tab.1Vehicleparameters名称数值名称数值m/kg1067kt/(N/rad)一55ooom。
四轮转向机构动力学分析

第三章转向系统转向系的功用是用来操纵车辆的行驶方向。
除转弯外,由于路面条件及车辆自身技术状况,如轮式车辆两侧轮胎气压不同等因素的影响,车辆直行时也会自动偏离原来的行驶方向,这时也需要操纵转向机构来纠正方向。
用来改变或恢复车辆行驶方向的专设机构称为车辆的转向系统。
第一节转向方式与转向原理一、转向方式车辆之所以能够在转向机构的操纵下实现转向,是由于转向动作使地面与行走装置之间的相互作用产生了与转变方向一致的转向力矩,克服阻止车辆转向的阻力矩而实现的。
转向方式有三种:一是靠车辆的轮子相对车身偏转一个角度来实现;二是靠改变行走装置两侧的驱动力来实现;三是既改变两侧行走装置的驱动力又使轮子偏转。
汽车与大多数轮式拖拉机采用第一种转向方式,履带拖拉机和无尾轮手扶拖拉机采用第二种转向方式,有尾轮手扶拖拉机及轮式拖拉机在某种情况下(如在田间作业时)采用第三种转向方式。
轮式车辆主要采用偏转车轮的方式实现转向。
偏转车轮转向具体实现方式有四种,如图3-1。
即前轮偏转、后轮偏转、前后轮同时偏转和折腰转向。
汽车、轮式拖拉机和农用运输车一般均采用偏转前轮的方式进行转向。
a b c d图3-1 偏转车轮转向的几种型式a-偏转前轮 b-偏转后轮 c-偏转前后轮 d-折腰转向系统的具体结构随车辆行走系统的类型、采用的转向方式而不同。
二、轮式车辆转向理论分析(一)运动学分析轮式车辆顺利完成转向的基本要求是各车轮作纯滚动。
为了满足这一要求,车辆在转向时各车轮轴心线应通过同一瞬心轴线,此轴线垂直于地面,其投影点如图3-2中O点,水平投影车辆转向时车身绕瞬心O点转动。
因车辆转向时的转弯半径R随前轮偏转角的变化而变化,所以称O点为瞬时转向中心。
图3-2 轮式车辆转向过程a-前轮转向 b-四轮异相位转向根据转向时各车轮纯滚动的要求,对于后轮驱动的4*2轮式车辆,转向时必须满足以下三个条件:(1)通过驾驶人员的操纵来实现前轮的偏转,车轮的偏转的程度决定了车辆的转弯半径。
四轮转向汽车操纵动力学虚拟仿真分析
四轮转向汽车操纵动力学虚拟仿真分析姓名 XX江苏大学京江学院车辆工程2班学号 XX[摘要]从机械动力学仿真的角度,研究4WS汽车的瞬态和稳态操纵动力学特性。
运用虚拟样机技术,给出4ws车辆在适当前轮转角及不同的大小、比值、方向以及转向时间差等后轮转角的条件下,车辆的瞬态和稳态动力学性能的表现。
关键词:4轮转向,操纵稳定性,机构动力学,虚拟仿真1 前言汽车四轮转向(4WS)技术是改善汽车操纵稳定性的主要手段之一,也是汽车主动底盘技术的重要组成部分。
运用4WS技术,可以有效地减小低速行驶时汽车的转弯半径,使汽车在低速行驶时更加灵活。
同时,该技术还可以大大地改善汽车在高速行驶时横摆角速度和侧向加速度等瞬态响应指标,提高高速行驶时的操纵稳定性。
在4WS汽车的研究方面,大量的是关于后轮参与转向而带来的车辆响应变化以及采用各种转向控制策略而产生的车辆响应的差异。
早期的后轮转向控制方法主要有以下几种:后轮与前轮逆向的转角比例控制方式;后轮与前轮同向的转角比例控制方式;后轮延时控制和前轮相位提前控制方式;后轮位相反转控制方式;前轮转角比例(后轮位相反转控制)P横摆角速度比例控制方式[1]。
近期的研究主要集中于利用现代控制理论进行4WS控制,如模型参考控制,或QR/Q!多目标优化控制等[2—4]。
在上述研究中,人们主要是从控制器设计的角度研究4WS车辆的.所利用是刚体多自由度系统模型,基本不考虑车辆转向系统的机构动力学特征。
建立车辆多自由度简化数学模型是从理论上研究4WS车辆动力学特性的最基本也是极为有效的方法。
从控制算法改进出发的4WS的研究大部分使用包含横摆角速度和侧向加速度的经典的2自由度所谓“自行车”模型;进一步的考虑有包括车辆侧倾的3自由度模型;更仔细地有7自由度、16自由度甚至更多自由度的线性或非线性车辆动力学模。
理论和试验都已经说明[4,5],在低加速度和小的转向角的情况下,这些模型能以较好的精度表征车辆转向的实际物理过程,基于它们设计的控制器能够正常工作。
四轮转向汽车侧向动力学最优控制和内外环联合控制研究共3篇
四轮转向汽车侧向动力学最优控制和内外环联合控制研究共3篇四轮转向汽车侧向动力学最优控制和内外环联合控制研究1汽车是我们日常生活中必不可少的交通工具之一,随着科技的发展,汽车的各项技术逐渐得到了升级。
其中,四轮转向技术作为一项非常重要的技术,对于汽车的操控性、稳定性以及安全性都有着非常大的提升。
四轮转向技术可以使得汽车在低速行驶时,车轮可以实现与车身相反的转向,从而减少掉头半径,提高车辆的机动性;在高速行驶时,车轮与车身同向转动,从而增强车辆的稳定性。
因此,在日常生活中,很多家庭用车都会配备四轮转向技术。
然而,四轮转向技术在操控和控制方面仍然存在于一定的局限性,特别是在侧向动力学方面。
侧向动力学是指汽车在转弯或曲线行驶时发生的侧向运动状态,主要包括侧向加速度、侧倾角、侧向力等。
侧向动力学会对汽车的行驶稳定性产生影响,同时也会影响行车安全。
为了更好地提高四轮转向汽车的行车稳定性和安全性,需要对其侧向动力学进行优化控制。
目前,四轮转向汽车侧向动力学最优控制和内外环联合控制研究逐渐成为了汽车控制领域的热点研究。
在四轮转向汽车侧向动力学最优控制方面,主要涉及控制算法的设计和车辆动态特性的建模。
目前,最优控制算法主要包括基于线性二次型控制、滑模控制、自适应控制、模糊控制等,这些算法都有着较好的应用效果。
同时,针对四轮转向汽车的动态特性进行建模,可以更好地理解汽车侧向动力学并为优化控制提供理论支持。
除了四轮转向汽车侧向动力学最优控制之外,内外环联合控制也是一个非常重要的控制思路。
该思路主要考虑汽车系统的内外部信息交互,将控制系统分为内环控制和外环控制,通过内外环控制的联合作用,可以对汽车侧向动力学进行更好的控制和优化。
总之,四轮转向汽车侧向动力学最优控制和内外环联合控制的研究,对于提高汽车的行车稳定性和安全性具有非常重要的价值。
相信在未来的研究中,这些控制思路和算法的应用将更加广泛,让我们在驾车出行时更加安全、可靠通过对四轮转向汽车侧向动力学的研究和优化控制,可以提高汽车的行车稳定性和安全性,为驾车出行提供更加可靠的保障。
四轮转向汽车操纵动力学仿真分析(农机化研究)---caishuangfei
四轮转向汽车操纵动力学仿真分析Simwe 会员 caishuangfei摘 要:基于两自由度汽车模型提出了一种新的有关4WS 最优控制的方法,即采用了转向盘前馈加上作用于前后轮的侧偏角和横摆角速度反馈的控制方法,讨论这种控制方法的可控性和可观性,结合实际参数对4WS 系统进行仿真分析并讨论参数Kc 对系统的影响,最后提出其发展方向。
关键词:四轮转向 最优控制 反馈 操纵动力学Abstract: A method of controlling four-wheel steering using optimal control theory based on 2DOF are put forward, the control method is input the steering wheel angle and feed back the sideslip angle and yaw velocity to the front and rear wheel angles. The controllability and observability of this method are discussed. The four-wheel steering system with practical parameter are simulated and the effect of parameter Kc on the system are also discussed. The developing directions of 4WS are put forwad in the end.Key words : four-wheel steering; optimal control; feedback; maneuverability dynamics随着汽车工业的不断发展,四轮转向技术作为提高汽车操纵稳定性的有效手段已得到了广泛的认可,许多新的有关四轮转向的观点和技术被不断提出并应用于实践。
基于MatlabSimulink的四轮转向汽车操纵动力学仿真分析
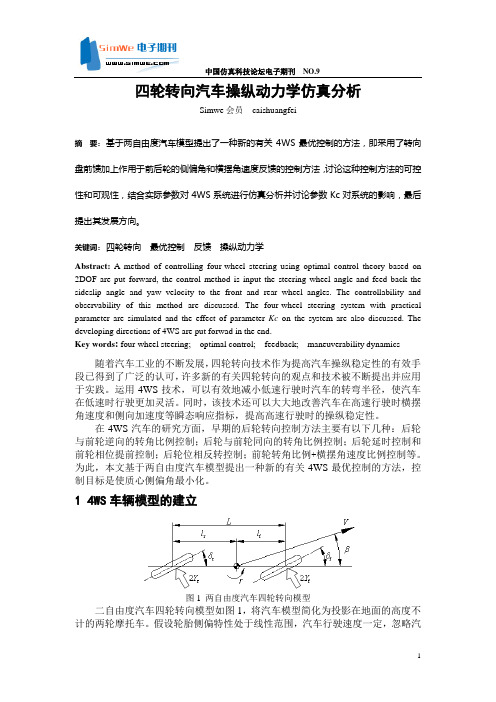
武汉理工大学课程论文基于Matlab/Simulink的四轮转向汽车操纵动力学仿真分析课程:汽车动力学学院(系):汽车工程学院专业班级:汽研学号:学生姓名:任课教师:乔维高基于Matlab/Simulink 的四轮转向汽车操纵动力学仿真分析摘要:本文分析了四轮转向(4WS)汽车的运动特性,建立了三自由度四轮转向汽车动力学模型,并基于Matlab /Simulink 对四轮转向汽车的操纵动力学进行仿真分析,结果表明四轮转向汽车的操纵性能要优于前轮转向汽车。
关键词:汽车,四轮转向,操纵动力学,仿真分析Simulation for the Handling Dynamics of Four-wheelSteering Vehicle Based on Matlab/SimulinkAbstract:Inthispaper,themotioncharacteristicsoffour-wheelsteering(4WS)vehicle are analyzed.The three degrees of freedom simulation analysis of four-wheel steering vehicle dynamics model is established. The simulation forthe handling dynamics of four-wheel steering vehicle based on Matlab / Simulink is done, and the results show that the handling performance of four-wheel steering vehicle is better than the front wheel steering vehicle.Key words:vehicle, four-wheel steering, handling dynamics, simulation 1 引言早期的汽车均采用前轮转向方式,但传统的前轮转向汽车具有低速时有低速时转向响应慢,回转半径大,转向不灵活;高速时方向稳定性差等缺点。
车四轮转向系统五自由度动力学模型
汽车四轮转向系统五自由度动力学模型作者:王敬, 王勇, 张艳芳, WANG Jing, WANG Yong, ZHANG Yan-Fang作者单位:重庆交通大学,机电与汽车工程学院,重庆,400074刊名:河北理工大学学报(自然科学版)英文刊名:JOURNAL OF HEBEI INSTITUTE OF TECHNOLOGY(NATURAL SCIENCE EDITION)年,卷(期):2008,30(3)引用次数:0次1.王京二自由度4WS汽车的动力分析(Ⅰ)--线性分析[期刊论文]-华南理工大学学报(自然科学版) 2001(6)2.姚永建.韩强四轮转向汽车的非线性模型及其动力方程[期刊论文]-华南理工大学学报(自然科学版) 2003(11)3.靳晓雄汽车振动分析 20024.S.M.凯利.贾启芬机械振动 20025.Dave Crolla.喻凡车辆动力学及其控制 20046.YOU S S.CHAI Y H Multi-objective control synthesis:an application to 4ws passenger vehicles 19997.郭孔辉汽车操纵动力学 19918.喻凡.林逸汽车系统动力学 20051.期刊论文付江华.巢凯年.丁建明.FU Jiang-hua.CHAO Kai-nian.DING Jian-ming质心转移对四轮转向汽车转向特性的影响-西华大学学报(自然科学版)2007,26(4)为了分析汽车质量和质心位置对四轮转向汽车操纵稳定性影响,本文根据二自由度四轮转向车辆的动力学模型,运用Matlab/Simulink对四轮转向特性进行仿真研究,讨论分析了汽车质量和质心位置的改变,对四轮转向车辆转向特性的影响.研究结果表明,汽车质心转移过大时,汽车操纵稳定性大大降低.2.学位论文宋作军四轮转向汽车的操纵稳定性研究2007四轮转向(4WS)的含义是指汽车除了通常的前轮转向之外,附加相应的后轮转向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
四轮转向汽车动力学建模
四轮转向汽车是一种特别设计的轿车,通过其增加的后轮转向,
可以改善车辆操控性,特别是在高速行驶时,更能帮助车辆在转弯时
保持稳定性。
汽车动力学建模是关于汽车运动的物理学和工程学领域,由汽车设计师和工程师使用来处理汽车运行的一个重要方法。
下面,
我们来了解一下建立四轮转向汽车动力学模型的步骤。
1.建立4-轮汽车运动学模型
汽车运动学是描述汽车运动的物理学。
它包括位置、速度和加速
度等向量对时间的变化规律的描述。
因此,在建立四轮转向汽车动力
学模型之前,需要先建立汽车运动学模型。
首先,需要画出汽车运动
的自由度图,通过这个图可以得到汽车的六个自由度。
然后依据相对
位置和旋转角度,建立汽车的刚体模型。
在这个模型中,需要求出刚
体的位移、速度和加速度。
2.建立4-轮汽车横向动力学模型
建立四轮转向汽车的横向动力学模型非常重要。
这是因为在高速
中行驶时,驾驶员需要处理车辆在转弯时的横向动力学问题。
而横向
动力学模型可以通过使用线性轮胎模型描述汽车极限横向加速度的限制,来描述汽车在转弯时的动力学模型。
除了横向加速度,模型还包
括横向质心位置,车辆横向速度以及所有轮的侧向力。
3.建立4-轮汽车纵向动力学模型
汽车的纵向动力学是描述汽车在加速和制动时的物理学。
从这个
角度,建立四轮转向汽车的纵向动力学模型可以处理车辆加速和制动
时的动态行为。
模型包括刚体动力学和轮胎轴承特性,通过轮轴转矩
和惯性力等描述汽车的动力学。
汽车纵向动力学采用的建模方法包括
使用简单的百分比拟合动态性能测试数据,计算上升速度,牵引力和
制动力等参数。
4.建立4-轮汽车转向动力学模型
四轮转向汽车比普通汽车具有更好的转向性能。
其转向动力学是
描述汽车在转向时的动态行为。
转向动力学模型主要包括前后悬架参数、车辆重量,以及转向时前后轮之间的差异。
这些参数一般可以通
过车辆动态性能实验来获取。
模型中,各轮转角决定了转向动力学的
结果,模型可以通过解方程组来描述轮胎侧向力和速度之间的关系。
总之,四轮转向汽车动力学建模可以通过引入汽车运动学模型,
横向动力学模型,纵向动力学模型,转向动力学模型来描述汽车性能。
其中的模型使用数字或手工计算,或者通过计算机模拟软件来实现。
这些模型可以用来帮助汽车制造商为产品性能进行调整,改进操纵性
和驾驶体验,并为驾驶员提供更好的行驶体验。