34电机转动控制实验
三相鼠笼异步电机的空载堵转实验吴丹
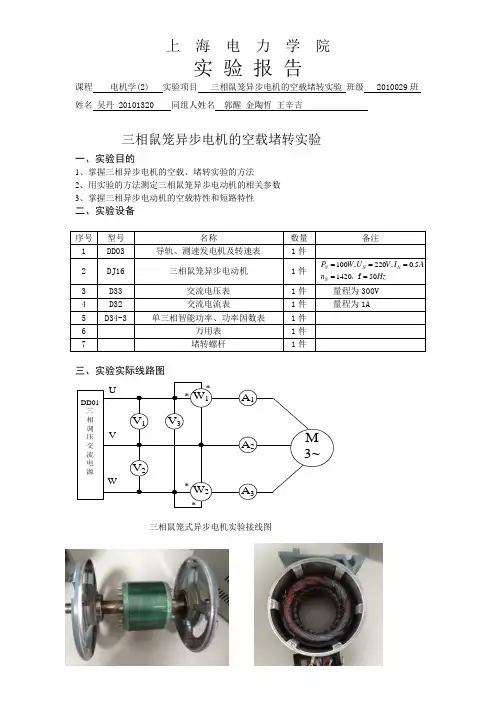
课程电机学(2) 实验项目三相鼠笼异步电机的空载堵转实验班级 2010029班姓名吴丹 20101320 同组人姓名郭醒金陶哲王辛吉三相鼠笼异步电机的空载堵转实验一、实验目的1、掌握三相异步电机的空载、堵转实验的方法2、用实验的方法测定三相鼠笼异步电动机的相关参数3、掌握三相异步电动机的空载特性和短路特性二、实验设备序号型号名称数量备注1 DD03 导轨、测速发电机及转速表1件2 DJ16 三相鼠笼异步电动机1件HznA IVUWPN NNN50f14205.0 ,220,100==== =,3 D33 交流电压表1件量程为300V4 D32 交流电流表1件量程为1A5 D34-3 单三相智能功率、功率因数表1件6 万用表1件7 堵转螺杆1件三、实验实际线路图DD01三相调压交流电源UVWV1V2V3W2W1****A1A2A3M3~三相鼠笼式异步电机实验接线图课程电机学(2) 实验项目三相鼠笼异步电机的空载堵转实验班级 2010029班姓名吴丹 20101320 同组人姓名郭醒金陶哲王辛吉三相鼠笼式异步电机转子结构三相鼠笼式异步电机定子结构异步电动机的铭牌万用表实验实际线路图三相鼠笼式异步电机的空载试验课程电机学(2) 实验项目三相鼠笼异步电机的空载堵转实验班级 2010029班姓名吴丹 20101320 同组人姓名郭醒金陶哲王辛吉实验实际线路图三相鼠笼式异步电机的堵转试验此时,转子堵转课程电机学(2) 实验项目三相鼠笼异步电机的空载堵转实验班级 2010029班姓名吴丹 20101320 同组人姓名郭醒金陶哲王辛吉测量定子绕组实际线路图Z=45.3ΩAXZ=47.5ΩBYZ=45.0ΩCZ课程 电机学(2) 实验项目 三相鼠笼异步电机的空载堵转实验 班级 2010029班 姓名 吴丹 20101320 同组人姓名 郭醒 金陶哲 王辛吉四、实现数据空载试验 三相鼠笼式异步电动机空载试验数据记录表序号1到19 异步机转速1492r/min 序号20 异步机转速207r/min 序号OL U (V)OL I (A)O P (W)cos φAB UBC UCA U OL UA IB IC IOL I1P2PO P1 264 264 265 264.3 0.31 0.31 0.29 0.303 50.1 -28.1 21.6 0.6 0.352 248 246 249 247.7 0.286 0.2850.270.280 43.9 -24.1 200.61 0.353 235 232 235 2340.266 0.2680.252 0.262 39.3 -20.7 18.6 0.62 0.34 4 228 226 228 227.3 0.256 0.258 0.249 0.254 37.1 -19.1 17.8 0.62 0.33 5 220 218 220 219.3 0.246 0.248 0.235 0.243 34.5 -17.3 17.2 0.63 0.33 6 214 212 214 213.3 0.238 0.240 0.225 0.234 32.5 -15.9 16.6 0.63 0.32 7 203 201 204 202.7 0.226 0.228 0.215 0.223 29.9 -14.1 15.8 0.64 0.32 8 191 190 192 1910.212 0.2100.200 0.207 26.9 -11.9 15.0 0.65 0.31 9 180.5 180 181 180.5 0.200 0.200 0.190 0.200 24.5 -10.3 14.2 0.66 0.30 10 170.7 170 172 170.9 0.189 0.188 0.180 0.186 22.3 -8.7 13.6 0.67 0.28 11 159 159 161 159.7 0.176 0.174 0.170 0.172 19.9 -6.9 13.0 0.69 0.25 12 149 148 151 149.3 0.166 0.164 0.160 0.163 18.1 -5.7 12.2 0.71 0.23 13 137.4 136 139 137.5 0.156 0.151 0.150 0.152 16.1 -4.3 11.8 0.74 0.21 14 127.5 126 130 127.8 0.149 0.140 0.140 0.143 14.7 -3.5 11.40.76 0.1815 113.8 114 116 114.6 0.139 0.135 0.130 0.135 12.7 -1.9 10.8 0.78 0.14 16 102.5 102 105 103.2 0.129 0.128 0.125 0.127 11.3 -0.9 10.2 0.82 0.07 17 90.1 91 92 91.03 0.124 0.120 0.120 0.121 9.9 0 9.9 0.87 0 18 80.2 80 76 78.7 0.121 0.120 0.120 0.1128.90.9 9.6 0.89 0.07 19 64.3 65 67 65.4 0.131 0.128 0.128 0.129 8.11.39.4 0.92 0.15 20 49.4495049.50.303 0.300.299 0.301 12.1 -1.111.20.81 0.07课程 电机学(2) 实验项目 三相鼠笼异步电机的空载堵转实验 班级 2010029班 姓名 吴丹 20101320 同组人姓名 郭醒 金陶哲 王辛吉堵转实验 三相鼠笼式异步电动机堵转试验数据记录表 序号KL U (V) KL I (A)K P (W)cos φAB U BC U CA U KL U A I B IC IKL I1P2PK P1 77.4 76.1 78.0 77.2 0.607 0.598 0.599 0.601 38.9 -2.9 36.2 0.82 0.06 2 72.0 71.5 73.0 72.2 0.549 0.540 0.545 0.545 32.7 -2.9 29.8 0.81 0.073 67.9 67.1 68.1 67.7 0.504 0.500 0.500 0.501 27.9 -2.7 25.4 0.80 0.08 4 62.8 62.0 63.0 62.6 0.450 0.450 0.448 0.449 23.1 -2.7 20.2 0.80 0.095 48.1 48.0 48.7 48.3 0.305 0.305 0.301 0.303 11.5 -2.1 9.4 0.77 0.14 631.431.232.031.50.1500.1500.1510.1513.5-1.12.40.710.23AX Z =45.3Ω BY Z =47.5Ω CZ Z =45.0Ω五、数据处理1作空载特性曲线课程电机学(2) 实验项目三相鼠笼异步电机的空载堵转实验班级 2010029班姓名吴丹 20101320 同组人姓名郭醒金陶哲王辛吉课程电机学(2) 实验项目三相鼠笼异步电机的空载堵转实验班级 2010029班姓名吴丹 20101320 同组人姓名郭醒金陶哲王辛吉2、短路特性曲线课程 电机学(2) 实验项目 三相鼠笼异步电机的空载堵转实验 班级 2010029班 姓名 吴丹 20101320 同组人姓名 郭醒 金陶哲 王辛吉由短路试验数据求短路参数短路阻抗:KLKL K K K I U I U Z 3==ϕϕ=501.07.673Ω=234.05157619Ω 短路电阻:22r KLKK K K I P I P ==ϕϕ=2501.04.25Ω=101.19481596Ω 短路阻抗:22r KK K Z X -==211.04442552Ω 式中 KL K U U =ϕ 3KL K I I =ϕ 3K K P P =ϕ电动机堵转时的相电压,相电流,每相短路功率(三角形接法)转子电阻的折合值:C K r r 1'2r -≈式中C 1r 是没有折算到C 075时实际值。
电机正反转控制实验报告
电机正反转控制实验报告
实验目的,通过实验掌握电机正反转控制的原理和方法,加深对电机控制的理解。
实验器材,直流电机、电源、开关、电阻、万用表、电路连接线等。
实验原理,电机正反转控制是通过改变电机的输入电压和电流方向来实现的。
在实验中,我们将通过改变电路连接方式和控制电源开关来实现电机的正反转控制。
实验步骤:
1. 将直流电机与电源、开关、电阻等连接好,组成电机正反转控制电路。
2. 分别测试电机的正转和反转情况,记录电机的转速和转向。
3. 通过改变电路连接方式和控制电源开关,实现电机的正反转控制,并记录实验结果。
4. 分析实验结果,总结电机正反转控制的原理和方法。
实验结果,通过实验,我们成功实现了电机的正反转控制。
当电路连接方式和电源开关改变时,电机可以实现正转和反转,并且转速和转向可以根据控制方式进行调节。
实验结论,电机正反转控制是通过改变电路连接方式和控制电源开关来实现的。
掌握了电机正反转控制的原理和方法,可以应用于实际的电机控制系统中,实现对电机的灵活控制。
通过本次实验,我们加深了对电机正反转控制的理解,为今后的电机控制工作打下了坚实的基础。
三相异步电动机正反转实验报告
三相异步电动机正反转实验报告三相异步电动机正反转实验报告引言:三相异步电动机是一种常见的电动机类型,广泛应用于工业生产中。
在实际应用中,正反转是电动机的基本运行方式之一。
本实验旨在通过实际操作,探究三相异步电动机的正反转原理及其实验现象,加深对电动机工作原理的理解。
实验目的:1. 了解三相异步电动机的工作原理;2. 掌握三相异步电动机正反转的实验操作;3. 观察并分析三相异步电动机正反转的实验现象。
实验器材:1. 三相异步电动机;2. 交流电源;3. 开关箱;4. 电压表;5. 电流表;6. 实验线缆。
实验步骤:1. 将三相异步电动机与交流电源相连,通过开关箱控制电机的启动和停止;2. 通过电压表和电流表测量电机的电压和电流;3. 依次将电机的三个相线与交流电源的三个相线相连;4. 打开电源,观察电机的运行状态,记录实验现象;5. 关闭电源,将电机的两个相线交换位置;6. 再次打开电源,观察电机的运行状态,记录实验现象。
实验结果:1. 正转实验现象:当电源打开时,电机按设定的方向旋转,同时电压表和电流表显示正常数值;2. 反转实验现象:当电源打开时,电机按设定的方向反向旋转,同时电压表和电流表显示正常数值。
实验分析与讨论:1. 三相异步电动机的正反转原理:三相异步电动机的正反转是通过交换电机的两个相线来实现的。
在正转实验中,电机按设定方向旋转,电流正常流动;而在反转实验中,电机按相反方向旋转,电流仍然正常流动。
这是因为电机的相序改变后,磁场的旋转方向也发生了改变,从而使电机反向旋转。
2. 实验现象的解释:正转实验中,电机按设定方向旋转,电流正常流动,说明电机的正转方向与电源的相位一致;反转实验中,电机按相反方向旋转,电流仍然正常流动,说明电机的反转方向与电源的相位相反。
这一现象验证了三相异步电动机正反转的原理。
实验总结:通过本次实验,我们深入了解了三相异步电动机的正反转原理及其实验现象。
正反转是电动机的基本运行方式,掌握正反转的操作和原理对于电动机的实际应用具有重要意义。
课题三相笼型异步电动机的正反转控制线路全解

UV W
M 3~
第28页/共39页
KM2 KM1
KM1 KM2
课题4 三相笼型异步电动机的正反转控制线路
QS FU1
FU2
L1
L2
KH
L3
KM1
松开SB2,
SB2动断触头
闭合SB2动合
触头断开电机
KH
继续正转运行
UV W
M
3~
SB1
KM2
KM1
KM2
SB2
SB3
KM2 KM1
KM1 KM2
第29页/共39页
QS FU1
FU2
L1
L2
KH
L3
U ---L1 V ---L2 W---L3
KM1
SB1
KM2
KM1
KM2
SB2
SB3
KH
UV W
M 3~
U ---L3 V ---L2 W---L1
第25页/共39页
KM2 KM1
KM1 KM2
课题4 三相笼型异步电动机的正反转控制线路
QS FU1
FU2
L1
L2
KH
UV W
M 3~
U ---L3 V ---L2 W---L1
KM2
KM1
KM1
KM2
第9页/共39页
课题4 三相笼型异步电动机的正反转控制线路
QS FU1
FU2
L1
L2
L3
合上电源开关 KM1 QS
KH
UV W M 3~
KH
SB1 KM2
SB2 KM1 SB3 KM2
KM2
KM1
KM1
KM2
第10页/共39页
步进电机控制实验实验报告及程序

实验九步进电机控制实验姓名专业通信工程学号成绩一、实验目的1.掌握keil C51软件与proteus软件联合仿真调试的方法;2.掌握步进电机的工作原理及控制方法;3.掌握步进电机控制的不同编程方法;二、实验仪器与设备1.微机1台2.keil C51集成开发环境3.Proteus仿真软件三、实验内容1.用Proteus设计一四相六线步进电机控制电路。
要求利用P1口作步进电机的控制端口,通过达林顿阵列ULN2003A驱动步进电机。
基本参考电路见后面附图。
2.编写程序,实现步进电机的正反转控制。
正反转时间分别持续10S时间,如此循环。
3.设计一可调速步进电机控制电路。
P3.2~P3.5分别接按键k1~k4,其中k1为正反转控制按键,k2为加速按键,k3为减速按键,k4为启动/停止按键,要求速度7档(1~7)可调,加减速各设3档,复位时位于4档,要求每档速度变化明显。
该步进电机控制电路在以上电路的基础上自行修改。
四、实验原理1.步进电机控制原理:1)步进电机是利用电磁铁的作用原理,步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
每来一个电脉冲,步进电机转动一定角度,带动机械移动一小段距离。
特点A.来一个脉冲,转一个步距角。
B.控制脉冲频率,可控制电机转速。
C.改变脉冲顺序,可改变转动方向。
2)以反应式步进电机为例说明步进电机的结构和工作原理。
三相反应式步进电动机的原理结构图如下,定子内圆周均匀分布着六个磁极,磁极上有励磁绕组,每两个相对的绕组组成一相。
转子有四个齿。
给A相绕组通电时,转子位置如图(a),转子齿偏离定子齿一个角度。
由于励磁磁通力图沿磁阻最小路径通过,因此对转子产生电磁吸力,迫使转子齿转动,当转子转到与定子齿对齐位置时(图b),因转子只受径向力而无切线力,故转矩为零,转子被锁定在这个位置上。
由此可见:错齿是助使步进电机旋转的根本原因。
3)三相反应式步进电动机的控制原理①三相单三拍:A 相→ B 相→ C 相→ A 相②三相六拍:A→AB →B →BC →C → CA→ A③三相双三拍:AB →BC →CA→AB4)步距角计算公式:θ—步距角 Z r—转子齿数 m —每个通电循环周期的拍数2、ULN2003A:七达林顿阵列ULN2003A是集成达林顿管反相驱动电路,内部还集成了一个消线圈反电动势的二极管,可用来驱动电机、继电器等功率器件。
plc步进电机控制实验报告
PLC步进电机控制实验报告引言在工业控制领域中,步进电机是一种常用的驱动设备。
为了实现对步进电机的精确控制,我们采用了PLC(可编程逻辑控制器)作为控制器。
本文将详细介绍PLC步进电机控制实验的步骤和结果。
实验目的本实验旨在通过PLC控制步进电机,实现对电机运动的精确控制。
具体实验目标如下: 1. 学习PLC的基本原理和编程方法; 2. 掌握步进电机的工作原理及其控制方法; 3. 设计并实施一个简单的步进电机控制系统。
实验设备本实验使用的设备包括: - PLC控制器 - 步进电机 - 电源 - 开关 - 传感器实验步骤步骤一:PLC编程1.打开PLC编程软件,并创建一个新的项目。
2.配置PLC的输入输出模块,并设置相应的IO口。
3.编写PLC的控制程序,实现对步进电机的控制逻辑。
4.调试程序,确保程序的正确性。
步骤二:步进电机的接线1.将步进电机的驱动器与PLC的输出模块连接。
2.将步进电机的电源与PLC的电源模块连接。
3.连接步进电机的传感器,以便监测电机的运动状态。
步骤三:实验验证1.通过PLC的编程软件,将编写好的程序下载到PLC控制器中。
2.打开PLC电源,确保PLC控制器正常工作。
3.通过PLC的输入模块输入控制信号,观察步进电机的运动情况。
4.通过传感器监测步进电机的运动状态,并与编写的控制程序进行比较。
实验结果通过本次实验,我们成功实现了对步进电机的精确控制。
控制程序的设计使步进电机按照预定的速度和方向运动,并且可以根据需要随时改变运动状态。
同时,通过传感器的监测,我们可以及时获取步进电机的运动信息,确保系统的稳定性和安全性。
实验总结本实验通过PLC控制步进电机,深入了解了PLC编程的基本原理和步进电机的工作原理。
通过实践,我们掌握了PLC编程的方法和步进电机控制的技巧。
在实际应用中,PLC控制步进电机具有广泛的应用前景,可以在自动化生产线、机械加工等领域中发挥重要作用。
参考文献[1] PLC步进电机控制实验教学单元.(2018)。
电机实验(8个电机试验)
目录实验一单相变压器实验 (1)实验二三相变压器的联接组实验 (7)实验三三相异步电动机工作特性测定实验 (14)实验四三相同步发电机的并联运行实验 (18)实验五异步电动机同步化运行实验 (23)实验六直流他励电动机实验 (28)实验七直流伺服电动机实验 (33)实验八旋转变压器实验 (39)实验一单相变压器实验一、实验目的和任务1、通过空载和短路实验测定变压器的变比和参数。
2、通过负载实验测取变压器的运行特性。
二、实验内容1、空载实验测取空载特性U0=f(I0),P0=f(U0) , cosφ0=f(U0)。
2、短路实验测取短路特性U K=f(I K),P K=f(I K), cosφK=f(I K)。
三、实验仪器、设备及材料四、实验原理1、空载试验:接线如图1-1所示 。
为了便于测量和安全起见,通常在低压侧加电压,将高压侧开路。
为了测出空载电流和空载损耗随电压变化的曲线,外加电压应能在一定范围内调节。
在测定的空载特性曲线I 0=f (U 1),p 0=f (U 1)上,找出对应于U 1= U 1N 时的空载电流I 0和空载损耗p 0作为计算励磁参数的依据。
2、短路试验:接线如图1-2所示。
为便于测量,通常在高压侧加电压,将低压侧短路。
由于短路时外加电压全部降在变压器的漏阻抗Z k 上,而Z k 的数值很小,一般电力变压器额定电流时的漏阻抗压降I 1N Z K 仅为额定电压的4~17.5%,因此,为了避免过大的短路电流,短路试验应在降低电压下进行,使I k 不超过1.2I 1N 。
在不同的电压下测出短路特性曲线I k =f (U k )、p k =f (U k )。
根据额定电流时的p k 、U k 值,可以计算出变压器的短路参数。
五、主要技术重点、难点1、空载实验在三相调压交流电源断电的条件下,按图1-1接线。
被测变压器选用三相组式变压器DJK10中的一只作为单相变压器,其额定容量 S N =50VA ,U 1N /U 2N =127/31.8V ,I 1N /I 2N =0.4/1.6A 。
实验三机构组合创新实验指导书
机构运动创新设计实验一、 实验目的:1、培养学生对机械系统运动方案的整体认识,加强学生的工程实践背景的训练,拓宽学生的知识面,培养学生的创新意识、综合设计及工程实践动手能力。
2、通过机构的拼接,在培养工程实践动手能力的同时,可以发现一些基本机构及机械设计中的典型问题,通过解决问题,可以对运动方案设计中的一些基本知识点融会贯通,对机构系统的运动特性有一个更全面的理解。
3、加深学生对平面机构的组成原理、结构组成的认识,了解平面机构组成及运动特性,进一步掌握机构运动方案构型的各种创新设计方法。
二、实验设备及工具:1、创新组合模型一套,包括组成机构的各种运动副、构件、动力源及一套实验工具。
设备名称:ZBS-C 机构运动创新设计方案实验台,实验台组件清单如下:序号 名称示意图规格数 量备注1 齿 轮M=2,α=20° Z=28、35、42、56 各3共12 D=56㎜;70㎜; 84㎜;112㎜ 2 凸轮基圆半径R=20㎜升回型; 行程30㎜ 33 齿条M=2 α=20°34槽轮4槽15拨盘双销,销回转半径R=49.5㎜ 1 6主动轴15㎜ 30㎜ 45㎜60㎜ 75㎜ 4 4 3 2 2序号名 称 示意图 规 格 数 量 备 注7 从动轴(形成回转副)15㎜ 30㎜ 45㎜60㎜ 75㎜8 6 6 4 4L= L=8 从动轴(形成移动副)15㎜ 30㎜ 45㎜60㎜ 75㎜8 6 6 4 49转动副轴(或滑块)L=5㎜3210复合铰链Ⅰ(或滑块)L=20㎜811复合铰链Ⅱ(或滑块)L=20㎜812 主动滑块插件40㎜55㎜1113 主动滑块座114 活动铰链座Ⅰ螺孔M816可在杆件任意位置形成转-移副15活动铰链座Ⅱ螺孔M516可在杆件任意位置形成移动副或转动副 16 滑块导向杆(或连杆)L=330㎜417 连杆Ⅰ100㎜ 110㎜ 150㎜160㎜ 240㎜ 300㎜ 12 12 8 8 8 8 序号名 称 示意图 规 格数 量备 注 18 连杆ⅡL 1=22㎜ L 2=138㎜819 压紧螺栓M564L= L= L=20 带垫片螺栓M54821 层面限位套4㎜ 7㎜ 10㎜ 15㎜30㎜ 45㎜ 60㎜ 6 6 20 40 20 20 1022紧固垫片(限制轴回转)厚2㎜孔¢16,外径¢222023 高副锁紧弹簧324 齿条护板625 T 型螺母20用于电机座和行程开关座的固定 26 行程开关碰块127 皮带轮628 张紧轮329 张紧轮支承杆330 张紧轮销轴3序号名 称 示意图规 格数 量备 注31 螺栓ⅠM10×15632 螺栓ⅡM10×206L=33 螺栓ⅢM8×15 1634 直线电机10㎜/s 1 带电机座及安装螺栓/螺母35 旋转电机10r/min 3 带电机座及安装螺栓/螺母36 实验台机架机架内可移动立柱5根,每根立柱上可移动滑块3块。
sc-sc-34电机温度、电流、的控制标准
电机温度、电流指标控制标准1 目的避免电机绝缘老化快,防止电机损耗大,增加电机使用寿命,最大限度的保证电机的正常运行。
2 适用范围本制度适用于各子公司的对电机的专业管理。
3 控制指标3.1温度控制指标3.1.1 对于每台电机在负载时,电机内部温度,不允许超过电机主绝缘的绝缘等级国3.1.2超温10%电机温度在负载时,定子温度超过10%,应立即减负荷,同时检查工艺,和温度控制仪表,发现异常应立即纠正,问题排出后,可以重新加负荷,同时必须外加风机强行降温。
3.1.3超温20%电机定子温升超过20%,此设备应停机修理,处理后才能运行。
3.1.4如果生产确实需要,可更换大功率电机后再运行。
3.2电流控制指标3.2.1电机标准控制指标以电机铭牌上额定电流(I e)为准。
3.2.2根据电力部规定,电机控制回路应装好所有的过流保护,应在过流时自动跳闸。
若由于生产需要,在运行时电机设备超负荷,根据国家电机设备的规定,电机电流不能超过额定电流的10%,并同时需采取降温措施,同时对这些温度超高、超电流、超负荷的电机加强监控管理(按3.3执行)。
3.3定期保养、校验3.3.1根据生产情况,对高温、超负荷、运行的设备累积运行160天应进行一次保养,保养内容包括:浸漆绝缘补偿,加强绝缘。
3.3.2根据生产情况,对高温、超负荷、运行的设备在进行保养的同时,必须对电机进行校验,校验内容包括:一、交流耐压试验,二、直流耐压试验,三、匝间脉冲试验,四、直流电阻检测,五、对槽楔、绑扎绳全部检查、转子短路条)。
3.3.3在完成3.3.1 和3.3.2 规定项目,检查无异常,再投入运行,在做试验中发现某项试验不合格项目必须进行处理,自己无能力处理的,必须送专业厂家修理。
3.3.4对这些超温、过流、过负荷的电机,在未解决问题之前,应升级管理。
电控部每天巡检两次,事业部每小时巡检一次,对此设备的、振动、温升、电流、声音、进行随时监控,以计划性安排检修,保证生产稳定。
电机拖动实验指导
电机与拖动基础实验指导书实验一直流发电机(天煌)一、实验目的1、掌握用实验方法测定直流发电机的各种运行特性,并根据所测得的运行特性评定该被试电机的有关性能。
2、通过实验观察并励发电机的自励过程和自励条件。
二、预习要点1、什么是发电机的运行特性?在求取直流发电机的特性曲线时,哪些物理量应保持不变,哪些物理量应测取。
2、做空载特性实验时,励磁电流为什么必须保持单方向调节?3、并励发电机的自励条件有哪些?当发电机不能自励时应如何处理?4、如何确定复励发电机是积复励还是差复励?三、实验项目1、他励发电机实验(1)测空载特性保持n=n N使I L=0,测取U0=f(I f)。
(2)测外特性保持n=n N使I f=I fN,测取U=f(I L)。
(3)测调节特性保持n=n N使U=U N,测取I f=f(I L)。
2、并励发电机实验(1)观察自励过程(2)测外特性保持n=n N使R f2=常数,测取U=f(I L)。
3、复励发电机实验积复励发电机外特性保持n=n N使R f2=常数,测取U=f(I L)。
四、实验设备及挂件排列顺序12、屏上挂件排列顺序D31、D44、D31、D42、D51五、实验方法1、他励直流发电机励磁电源图1-1直流他励发电机接线图按图1-1接线。
图中直流发电机G选用DJ13,其额定值P N=100W,U N=200V,I N=0.5A,n N=1600r/min。
校正直流测功机MG作为G的原动机(按他励电动机接线)。
MG、G及TG由联轴器直接连接。
开关S选用D51组件。
R f1选用D44的1800Ω变阻器,R f2 选用D42的900Ω变阻器,并采用分压器接法。
R1选用D44的180Ω变阻器。
R2为发电机的负载电阻选用D42,采用串并联接法(900Ω与900Ω电阻串联加上900Ω与900Ω并联),阻值为2250Ω。
当负载电流大于0.4 A时用并联部分,而将串联部分阻值调到最小并用导线短接。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.4 电机转动控制实验一、实验目的1.熟悉ARM本身自带的六路即三对PWM,掌握相应寄存器的配置。
2.编程实现ARM系统的PWM输出和I/O输出,前者用于控制直流电机,后者用于控制步进电机。
3.了解直流电机和步进电机的工作原理,学会用软件的方法实现步进电机的脉冲分配,即用软件的方法代替硬件的脉冲分配器。
4.掌握带有PWM和I/O的CPU编程实现其相应功能的主要方法。
二、实验内容学习步进电机和直流电机的工作原理,了解实现两个电机转动对于系统的软件和硬件要求。
学习ARM知识,掌握PWM的生成方法,同时也要掌握I/O的控制方法。
1.通过超级终端来控制直流电机与步进电机的切换。
三、预备知识1、用ARM ADS1.2集成开发环境,编写和调试程序的基本过程。
2、ARM应用程序的框架结构。
3、会使用Source Insight 3 编辑C语言源程序。
4、掌握通过ARM自带的A/D转换器的使用。
5、了解直流电机的基本原理。
6、了解步进电机的基本原理,掌握环形脉冲分配的方法。
四、实验设备及工具硬件:ARM嵌入式开发平台、用于ARM920T的JTAG仿真器、PC机Pentium100以上。
软件:PC机操作系统Win2000或WinXP、ARM ADS1.2集成开发环境、仿真器驱动程序、超级终端通讯程序五、实验原理及说明1.直流电机1)直流电动机的PWM电路原理晶体管的导通时间也被称为导通角а,若改变调制晶体管的开与关的时间,也就是说通过改变导通角а的大小,如图6-1所示,来改变加在负载上的平均电压的大小,以实现对电动机的变速控制,称为脉宽调制(PWM)变速控制。
在PWM变速控制中,系统采用直流电源,放大器的频率是固定,变速控制通过调节脉宽来实现。
构成PWM的功率转换电路或者采用"H"桥式驱动,或者采用"T"式驱动。
由于"T"式电路要求双电源供电,而且功率晶体管承受的反向电压为电源电压的两倍。
因此只适用于小功率低电压的电动机系统。
而"H"桥式驱动电路只需一个电源,功率晶体管的耐压相对要求也低些,所以应用得较广泛,尤其用在耐高压的电动机系统中。
图6-1 脉宽调制(PWM)变速原理2)直流电动机的PWM等效电路如图7-2-a所示:是一个直流电动机的PWM控制电路的等效电路。
在这个等效电路中,传送到负载(电动机)上的功率值决定于开关频率、导通角度及负载电感的大小。
开关频率的大小主要和所用功率器件的种类有关,对于双极结型晶体管(GTR),一般为lkHz至5kHz,小功率时(100W,5A以下)可以取高些,这决定于晶体管的特性。
对于绝缘栅双极晶体管(IGBT),一般为5kHz至l2kHz;对于场效应晶体管(MOSFET),频率可高达2OkHz。
另外,开关频率还和电动机电感有关,电感小的应该取得高些。
图6-2 a) 等效电路b) PWM电路中电流和电压波讨论当接通电源时,电动机两端加上电压U P,电动机储能,电流增加,当电源中断时,电枢电感所储的能量通过续流二极管VD继续流动,而储藏的能量呈下降的趋势。
除功率值以外,电枢电流的脉动量也与电动机的转速无关,仅与开关周期、正向导通时间及电机的电磁时间常数有关。
3)直流电动机PWM电路举例图6-3为直流电动机PWM电路的一个例子。
它属于"H"桥式双极模式PWM电路。
图6-3 直流电动机PWM电路举例电路主要由四部分组成,即三角波形成电路、脉宽调制电路、信号延迟及信号分配电路和功率电路。
电路中各点波形如图6-4所示。
其中信号延迟电路是为了防止"共态直通"而设置的。
一般延迟时间调整在(10~30)ps之内,根据晶体管特性而定。
其原理简单叙述如下:功率电路主要由四个功率晶体管和四个续流二极管组成。
四个功率晶体管分为两组,V1与V4、V2与V3分别为一组,同一组的晶体管同时导通,同时关断。
基极的驱动信号U b1 = U b2,U b3=U b4。
其工作过程为:·在t1’—t2 期间,U b1> 0与U b4 > 0,V1与V4导通,V2与V3截止,电枢电流沿回路l流通。
·在t2— T+ t1’期间,U b1< 0与U b4 < 0,V1与V4截止,U b2 > 0与U b 3> 0但此时由于电枢电感储藏着能量,将维持电流在原来的方向上流动,此时电流沿回路2流通;经过跨接于V2与V3上的续流二极管VD4、VD5。
受二极管正向压降的限制,V2与V3不能导通。
·T+ t1’之后,重复前面的过程。
·反向运转时,具有相似的过程。
图6-4 PWM电路中各点波形4)开发平台中直流电机驱动的实现开发板中的直流电机的驱动部分如图7-3所示;由于S3C2410X芯片自带PWM定时器,所以控制部分省去了三角波产生电路、脉冲调制电路和PWM信号延迟及信号分配电路,取而代之的是S3C2410X芯片的定时器0、1组成的双极性PWM发生器。
PWM发生器用到的寄存器主要有以下几个:(1)TCFG0表6-1 TCFG0寄存器参考:Dead zone length=0;prescaler value=2。
(2)TCFG1表6-2 TCFG1寄存器时钟输入频率=PCLK/(prescaler value+1)/(divider value)。
prescaler value有TCFG0决定;divider value由TCFG1决定。
参考:无DMA模式,divider value=2。
本系统中PCLK=50.7MHz (3)TCON表7-3 TCON寄存器参考:dead zone operation enable;Inverter off(4)TCNTB0& TCMPB0表7-4 TCNTB0& TCMPB0TCNTB0决定了脉冲的频率,TCMPB0决定了正脉冲的宽度。
当TCMPB0=TCNTB0/2时,正负脉冲宽度相同;当TCMPB0由0变到TCNTB0时,负脉冲宽度不断增加。
参考:脉冲频率为1Hz。
(5)TCNTO0表7-5 TCNTO02.步进电机1)步进电机概述步进电机是一种能够将电脉冲信号转换成角位移或线位移的机电元件,它实际上是一种单相或多相同步电动机。
单相步进电动机有单路电脉冲驱动,输出功率一般很小,其用途为微小功率驱动。
多相步进电动机有多相方波脉冲驱动,用途很广。
使用多相步进电动机时,单路电脉冲信号可先通过脉冲分配器转换为多相脉冲信号,在经功率放大后分别送入步进电动机各相绕组。
每输入一个脉冲到脉冲分配器,电动机各相的通电状态就发生变化,转子会转过一定的角度(称为步距角)。
正常情况下,步进电机转过的总角度和输入的脉冲数成正比;连续输入一定频率的脉冲时,电动机的转速与输入脉冲的频率保持严格的对应关系,不受电压波动和负载变化的影响。
由于步进电动机能直接接收数字量的输入,所以特别适合于微机控制。
2)步进电机的种类目前常用的步进电机有三类: 1、反应式步进电动机(VR )。
它的结构简单,生产成本低,步距角可以做的相当小,但动态性能相对较差。
2、 永磁式步进电动机(PM )。
它的出力大,动态性能好;但步距角一般比较大。
3、混合步进电动机(HB )。
它综合了反应式和永磁式两者的优点,步距角小,出力大,动态性能好,是性能较好的一类步进电动机。
3)步进电机的工作原理现以反应式三相步进电机为例说明其工作原理。
定子铁心上有六个形状相同的大齿,相邻两个大齿之间的夹角为60度。
每个大齿上都套有一个线圈,径向相对的两个线圈串联起来成为一相绕组。
各个大齿的内表面上又有若干个均匀分布的小齿。
转子是一个圆柱形铁心,外表面上圆周方向均匀的布满了小齿。
转子小齿的齿距是和定子相同的。
设计时应使转子齿数能被二整除。
但某一相绕组通电,而转子可自由旋转时,该相两个大齿下的各个小齿将吸引相近的转子小齿,使电动机转动到转子小齿与该相定子小齿对齐的位置,而其它两相的各个大齿下的小齿必定和转子的小齿分别错开正负1/3的齿距,形成“齿错位”,从而形成电磁引力使电动机连续的转动下去。
和反应式步进电动机不同,永磁式步进电动机的绕组电流要求正,反向流动,故驱动电路一般要做成双极性驱动。
混合式步进电动机的绕组电流也要求正,反向流动,故驱动电路通常也要做成双极性。
4)开发板中步进电机控制的实现本开发板中使用的步进电机为四相步进电机。
转子小齿数为64。
系统中采用四路I/O 进行并行控制,ARM 控制器直接发出多相脉冲信号,在通过功率放大后,进入步进电机的各相绕组。
这样就不再需要脉冲分配器。
脉冲分配器的功能可以由纯软件的方法实现。
图6-5 四相步进电机在开发板中的接法四相步距电机的控制方法有四相单四拍,四相单、双八拍和四相双四拍三种控制方式。
步距角的计算公式为:θb =kmCZ360其中:m 为相数,控制方法是四相单四拍和四相双四拍时C 为1,控制方法是四相单、双八拍时C 为2,Z k 为转子小齿数。
本系统中采用的是四相单、双八拍控制方法,所以步距角为360°/512。
但步进电机经过一个1/8的减速器引出,实际的步距角应为360°/512/8。
开发平台中使用EXI/O的高四位控制四相步进电机的四个相。
按照四相单、双八拍控制方法,电机正转时的控制顺序为A→AB→B→BC→C→CD→D→DA。
EXI/O的高四位的值参见表7-6。
表7-6 电机正转时,EXI/O的高四位的值可以通过宏SETEXIOBITMASK(bit,mask)(EXIO.h)来设置扩展I/O口,其中mask参数为0xf0。
六、实验步骤1.新建工程,将“Exp4电机转动控制实验”中的文件添加到工程。
2.编写直流电机初始化数(MotorCtrl.c)3.控制直流电机4.控制步进电机图6-8 控制步进电机七、思考题1.简述PWM的基本原理,思考其基本参数的变化对电机转动的影响。
2.步进电机的基本工作原理是什么?简述软件实现的脉冲分配器的方法。
3.思考四相步进电机的各相先后导通的所有可能,确定步距角的变化,自己动手编出程序,在试验平台上验证。
4.PWM与系统模拟电压是如何对应转化的?。