基于STM32的步进电机转速控制实验设计
基于stm32单片机的步进电机实验报告
基于stm32单片机的步进电机实验报告步进电机是一种将电脑控制信号转换为机械运动的设备,常用于打印机、数码相机和汽车电子等领域。
本实验使用STM32单片机控制步进电机,主要目的是通过编程实现步进电机的旋转控制。
首先,我们需要了解步进电机的基本原理。
步进电机是一种能够按照一定步长精确旋转的电机。
它由定子和转子两部分组成,通过改变定子和转子的电流,使转子按照一定的角度进行旋转。
在本实验中,我们选择了一种四相八拍步进电机。
该电机有四个相位,即A、B、C、D相。
每个相位都有两个状态:正常(HIGH)和反向(LOW)。
通过改变相位的状态,可以控制步进电机的旋转。
我们使用STM32单片机作为控制器,通过编程实现对步进电机的控制。
首先,我们需要配置STM32的GPIO口为输出模式。
然后,编写程序通过改变GPIO口的状态来控制步进电机的旋转。
具体来说,我们将A、B、C、D相分别连接到STM32的四个GPIO口,设置为输出模式。
然后,通过改变GPIO口输出的电平状态,可以控制相位的状态。
为了方便控制,我们可以定义一个数组,将表示不同状态的四个元素存储起来。
通过循环控制数组中的元素,可以实现步进电机的旋转。
在实验中,我们通过实时改变数组中元素的值,可以实现不同的旋转效果。
例如,我们可以将数组逐个循环左移或右移,实现步进电机的正转或反转。
在实验过程中,我们可以观察步进电机的旋转情况,并根据需要对程序进行修改和优化。
可以通过改变步进电机的旋转速度或步进角度,来实现更加精确的控制。
总结起来,通过本次实验,我们了解了步进电机的基本原理,并通过STM32单片机控制步进电机的旋转。
通过编写程序改变GPIO口的状态,我们可以实现步进电机的正转、反转和精确控制。
这对于理解和应用步进电机技术具有重要意义。
基于STM32的步进电机运动控制设计
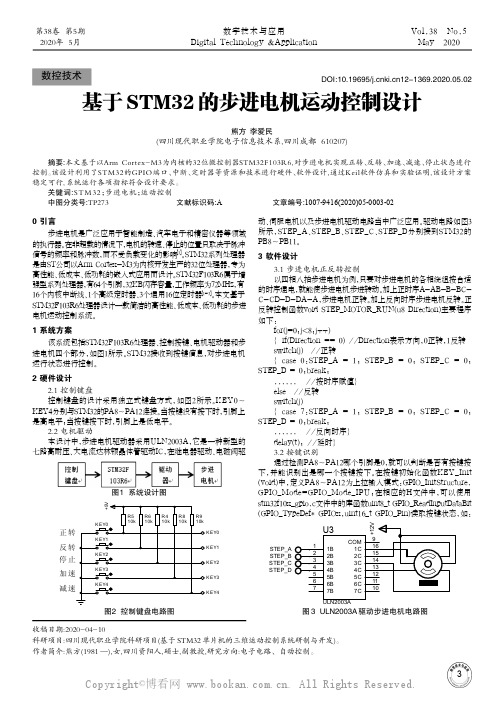
图1 系统设计图3第 38 卷 数字技术与应用 4#define KEY0 GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_8) //KEY0为PA8上按键的值键盘扫描函数u8 KEY_Scan(void)的程序设计思路如图4所示:3.3 中断技术STM32的每一个GPIO引脚都可以作为外部中断的中断输入口,都能配置成一个外部中断触发源。
STM32把同一个序号的引脚组成一组,每组对应一个外部中断/事件源(即中断线)EXTIx(x:0~15),将众多中断触发源分成16组。
本系统软件设计中,加速、减速、停止按键设置为中断源,即PA10、PA11、PA12引脚对应3个外部中断源,分别对应的中断线是EXTIx10~EXTIx12。
外部中断配置函数void exit_config(void)中主要代码如下:RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //使能复用时钟GPIO_EXTILineConfig(GPIO_PortSourceGPIOA,GPIO_PinSource10);//设置PA10~PA12为中断源EXTI_Init(&EXTI_InitStructure);//外部中断初始化NVIC_Init(&NVIC_InitStructure);//中断优先级初始化在中断服务函数中,中断线EXTIx15~EXTIx10共用一个外部中断通道E XT I 15_10_I R Q n,同时也共用一个中断服务函数EXTI15_10_IRQHandler()。
在中断服务函数中,判定是什么中断源。
如果是停止中断,就不再加载脉冲;如果是加速中断,则减少加载的脉冲延时;如果是减速中断,则增加脉冲延时。
3.4 延时设计STM32中有很多定时器,本文中的延时设计采用其中的滴答定时器(SysTick)。
它是一个24位的系统节拍定时器,具有自动重装载和溢出中断功能,所有基于Cortex-M3的芯片都可以由此获得一定的时间间隔[2]。
stm32控制步进电机速度算法_解释说明

stm32控制步进电机速度算法解释说明1. 引言1.1 概述在现代工业领域中,步进电机广泛应用于各种自动控制系统中,其具有精确定位、易于控制等优点。
对步进电机进行速度控制是其中的一项重要任务,因为精确控制速度可以使步进电机在工作过程中稳定可靠。
为了实现步进电机的速度控制,本文将介绍一种基于STM32的步进电机速度算法。
通过该算法,可以实时监测步进电机的当前速度,并根据需要进行调整。
这样可以保证步进电机在不同工作负载下都能保持稳定的运行效果。
本文将首先对步进电机原理进行简要介绍,包括其结构和工作原理。
接着,将详细讲解步进电机速度控制的原理和方法。
最后,我们将详细阐述如何使用STM32微控制器来实现这一算法,并给出相应的硬件连接与配置说明。
1.2 文章结构本文主要分为五个部分:引言、步进电机速度控制算法、算法设计与实现、实验结果与分析以及结论与展望。
引言部分主要对整篇文章进行了概述,并明确了文章的目的和结构。
步进电机速度控制算法部分将详细介绍步进电机的原理和速度控制方法。
算法设计与实现部分将讲解如何设计步进电机驱动模块,并进行硬件连接与配置。
同时还将重点介绍软件算法的设计和调试过程。
实验结果与分析部分将说明实验环境和参数设置,以及对实验测量数据进行详细分析。
最后,结论与展望部分总结了整个研究工作的成果,并提出了改进方向和未来的发展建议。
1.3 目的本文旨在介绍一种有效且可靠的STM32控制步进电机速度算法。
通过该算法,可以准确地控制步进电机的转速并保证其在不同负载下运行稳定。
同时,本文还希望能够为步进电机速度控制领域的研究提供参考,并为相关工程应用提供技术支持。
2. 步进电机速度控制算法:2.1 步进电机原理简介:步进电机是一种特殊的直流电动机,它通过逐步驱动来控制旋转角度。
步进电机由固定数量的磁极组成,每一次收到脉冲信号时,它会前进一个固定的角度(步数)。
步进电机通常用于需要精确位置和速度控制的应用。
基于STM32多步进电机驱动控制系统设计
私
, 卜
I ,矾’Fra bibliotek 第 4期
I n s t r u me n t T e c h n i q u e a n d S e n s o r
N o . 4
基于 S T M3 2多步 进 电机 驱 动控 制 系统 设计
廖 平, 韩伟伟
4 1 0 0 8 3 ) ( 中南大学 高性能复杂制造国家重点实验室 , 湖南长沙
摘要 : 在 不同的控 制场合 下, 需要不 同的控 制电路控 制步进 电机驱动器 , 而不 同的控制 电路对步进 电机 的工作性 能有 很 大的影响 , 为此设计一款 集微控制 器和驱动芯片 于一体 的多轴 多细分步进 电机驱动控制 器来 实现驱动 和控 制的 完美结
合 。驱动控制 器以 S T M3 2 F 1 0 3 Z E T 6为 主 控 制 器 , L V 8 7 2 7为 驱 动 芯 片 , 采用 U S B进 行 主 控 制 器 与上 位 机 的数 据 通 信 , 根 据
t ol r wi t h d i fe r e nt ̄e q ue n c y PW M .M o d e l i n g,t h e o r e t i c a l a n a l ys i s a nd s i mu l a t i on o f t h e who l e s y s t e m we r e e s t a bl i s h e d ba s e d o n t he
De s i g n o f Dr i v e Co n t r o l S y s t e m o f Mu l t i p l e S t e p pe r Mo t o r s Ba s e d o n S TM 3 2
基于STM32和FPGA的多通道步进电机控制系统设计共3篇
基于STM32和FPGA的多通道步进电机控制系统设计共3篇基于STM32和FPGA的多通道步进电机控制系统设计1本文介绍了基于STM32和FPGA的多通道步进电机控制系统设计。
一、设计目标本次设计的目标是:设计一个可控制多路步进电机的系统,具备高效、可靠的控制方式,实现步进电机多通道运动控制的目标。
二、硬件选型1、主控芯片STM32本设计采用STM32作为主控芯片,STM32系列微控制器具有高性能、低功耗、高集成度、易于开发等优点,非常适合此类控制系统。
2、FPGA本设计采用FPGA作为数据处理和控制模块,FPGA具有可编程性和高速、低功耗的特点,在电机控制系统中有广泛的应用。
3、步进电机步进电机具有速度可调、定位精度高等特点,很适合一些高精度的位置控制系统。
4、电源模块电源模块负责为整个系统提供稳定的电源。
5、驱动模块驱动模块负责驱动步进电机,其控制原理为将电机的输入电流拆分为若干个短脉冲信号,每一个短脉冲信号控制一个步距运动。
三、系统设计1、STM32控制器设计STM32控制器是本系统的核心,其功能是读取FPGA发送的控制信号和控制步进电机的运动。
STM32控制器处理的信号主要包括方向信号、脉冲信号、微步子段等控制参数,将这些参数按照驱动模块的需求分发到各个驱动模块中,从而控制步进电机的运动。
2、FPGA模块设计FPGA模块是本系统的数据处理模块,其主要功能是接收STM32发送的指令,进行解码并且转化为步进电机的控制信号,以驱动步进电机的运动,同时FPGA模块还负责将电机的运动数据反馈回STM32,以保证整个系统的稳定运行。
3、驱动模块设计驱动模块是本系统的控制模块,其主要功能是将电机的输入电流拆分成若干个短脉冲信号,每一个短脉冲信号控制一个步距运动,从而实现对步进电机的控制。
四、系统流程1、系统初始化整个系统初始化主要包括STM32控制器的初始化、FPGA模块的初始化、各个驱动模块的初始化、电源模块的初始化,当系统初始化完成后,所有硬件设备均已经准备完成,可以开始正常的运行。
基于stm32的28byj步进电机控制设计原理

基于stm32的28byj步进电机控制设计原理
基于STM32的28BYJ步进电机控制设计原理主要包含以下几个步骤:
1. 确定步进电机的型号:28BYJ步进电机是一种减速型永磁式步进电机,其有效最大外径为28毫米,有四相八拍的工作方式。
2. 确定步进电机的工作原理:五线四相步进电机,不同相位得电会让步进电机的转子转动一个角度,按一定规律给不同的相位通电,就可以让步进电机连续转动。
通电的顺序如下表所示。
3. 控制电机的转速:通过改变延时的时间,就可以控制电机的转速。
但要注意不能太慢,也不要太快,需要不断调试以达到合理范围。
4. 控制电机的转向:调换得电的顺序,就可以控制电机的转向。
5. 连接硬件:将STM32的IO口和步进电机的四条相线连接,但要确保连接顺序正确,否则可能无法正常工作。
具体来说,如果你想让步进电机向一个方向转动,你可以按照这个方向的通电顺序给电机通电;如果你想让步进电机停止转动,你可以让所有相位的电流都停止;如果你想改变步进电机的转动方向,你可以改变通电的顺序。
此外,通过改变通电的频率,你可以改变步进电机的转速。
以上就是基于STM32的28BYJ步进电机控制设计原理。
基于STM32的步进电机控制系统-自动化本科毕业设计

基于STM32的步进电机控制系统-自动化本科毕业设计本文简要介绍了自动化本科毕业设计的主题和目的,并概述了STM32步进电机控制系统的重要性和应用领域。
步进电机控制系统是现代自动化技术中的重要组成部分,广泛应用于各个领域,如机械加工、电子设备、机器人控制等。
该系统能够实现精确控制和位置定位。
然而,传统的步进电机控制系统存在一些限制,如运行效率低、系统稳定性差等。
因此,基于STM32的步进电机控制系统应运而生。
本科毕业设计的主题是基于STM32的步进电机控制系统的设计与实现。
通过使用STM32单片机,设计一个高效稳定的步进电机控制系统,能够实现精确的位置控制和运动控制。
该系统具有较高的运行效率和稳定性,能够应用于各种自动化领域,提高生产效率和产品质量。
关键词:步进电机控制系统,STM32,自动化,本科毕业设计步进电机是一种常见的电动机类型,具有特定的原理和工作方式。
它在自动化领域有广泛的应用。
本文将讨论步进电机的原理和工作方式,并介绍选择基于STM32的步进电机控制系统作为本科毕业设计主题的原因。
步进电机是一种将电脉冲信号转换为离散步进运动的电动机。
它通过电磁铁的启动顺序和定向,使得转子以角度的方式进行运动。
步进电机的原理基于电磁铁的电磁效应和磁性材料的性质来实现。
步进电机在自动化领域有许多应用。
例如,步进电机常被用于精密定位系统、数控机床、印刷机、纺织机械等领域。
它们的精确度、可靠性和可编程性使它们成为许多自动化系统中的理想选择。
选择基于STM32的步进电机控制系统作为本科毕业设计的主题有以下原因:STM32是一种广泛应用的单片机系列,具有强大的计算和控制能力。
STM32具有丰富的外设资源,能够满足步进电机控制系统的需求。
STM32提供了方便的开发环境和丰富的开发工具,使得设计和开发步进电机控制系统更加简便和高效。
基于STM32的步进电机控制系统可以在实践中验证和应用步进电机控制的原理和技术,对于学生来说具有一定的教育意义。
基于stm32的步进电机控制系统设计与实现
基于stm32的步进电机控制系统设计与实现基于STM32的步进电机控制系统设计与实现1. 概述步进电机是一种非常常见的电动机,在许多自动化系统和工控设备中得到广泛应用。
它们具有精准的定位能力和高效的控制性能。
本文将介绍如何使用STM32微控制器来设计和实现步进电机控制系统。
2. 硬件设计首先需要确定步进电机的规格和要求,包括步距角、相数、电流和电压等。
根据步进电机的规格,选择合适的驱动器芯片,常见的有L298N、DRV8825等。
接下来,将选定的驱动器芯片与STM32微控制器相连。
通常,步进电机的控制信号需要使用到微控制器的GPIO引脚,同时由于步进电机的工作电流比较大,需要使用到微控制器的PWM输出信号来调节驱动器芯片的电流限制。
除此之外,还需要一个电源电路来提供驱动器和步进电机所需的电源。
可以选择使用一个电源模块,也可以自行设计电源电路。
3. 软件设计软件设计是步进电机控制系统的核心部分,主要包括步进电机驱动代码的编写和控制算法的实现。
首先,需要在STM32的开发环境中编写步进电机驱动代码。
根据所选的驱动器芯片和步进电机规格,编写相应的GPIO控制代码和PWM输出代码。
同时,可以添加一些保护性的代码,例如过流保护和过热保护等。
接下来,需要设计和实现步进电机的控制算法。
步进电机的控制算法通常是基于位置控制或速度控制的。
对于位置控制,可以使用开环控制或闭环控制,闭环控制通常需要使用到步进电机的编码器。
对于开环控制,可以通过控制步进电机的脉冲数来控制位置。
通过控制脉冲的频率和方向,可以实现步进电机的转动和停止。
这种方法简单直接,但是定位精度有限。
对于闭环控制,可以使用PID控制算法或者更高级的控制算法来实现位置控制。
通过读取步进电机的编码器反馈信号,可以实时调整控制输出。
这种方法可以提高定位精度和抗干扰能力,但是算法实现相对复杂。
4. 系统实现在完成硬件设计和软件设计后,可以进行系统的调试和实现。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
步进电机是将电脉冲信号转换为角位移或线位 移的开环控制元件, 驱动器的作用使其步进化、数字 化。在不超载的情况下, 步进电机的转速、停止的位 置, 只取决于脉冲信号的频率和脉冲数, 而不受负载 的限制。基于步进电机的诸多优点, 它已在工业自 动化设备等许多领域得到广泛应用。因此提出更全 面、精 度 更 高 的 步 进 电 机 控 制 方 式 变 得 更 加 重要 [ 1] 。
Ab stract: Based on Cortex - M 3 kerne,l STM 32 has dist inguished feature such as low - pow er, abun dant interna l per ipherals, quick processing speed and so on. It s' typically applied in data acqu isition system. Step m otor ro tational speed contro l design based on STM 32 is introduced in this paper. Com paring w ith tradit iona l sing lech ip, it hasm any advantages such as fast processing and perfect func ion. STM 32 m an ipulate step m oto r acco rd ing to senso r signa l and disp lay operating state. Th is article has g iven deta ils in hardw are design and softw are procedure, attach ing part o f exper im ent descrip tion. Th is experim ent system has proved to be stable and reliab le through practice, w hich is supposed to be great effect of experim en t teaching. Key w ord s: STM 32; Cortex- M 3; PWM; step m oto r
将 AD转换结果与定时器寄存器配置相结合就能 调整脉冲频率与占空比, 从而实现对步进电机运行速
度的控制。通过旋动电位器, 可以直观地感受到, 随着 阻值的增加与减小, 电机运行速度相应加快与减慢 [ 9] 。 2. 2 显示实验
显示实验分为两个功能: 电机工作状态显示与 电机运行速度显示。通过拨动开关对显示功能进行 选择。当开关处于工作状态显示, MCU 控制步进电 机旋转方向的同时, 将该信号发送给数码显示模块, 从而实时显示当前电机工作状态; 当开关处于运行 速度显示, M CU 根据定时器中配置的脉冲频率和步 进电机的步距角, 可以计算出相应旋转时间与角度, 从而显示电机的运行速度。
60 此它与传统的单片机系统设计相比, 大大缩短了系 统开发时间 [ 3] 。
1 系统简介
系统将采集的传感器信号经过处理后送入主控 制器, 主控制器根据不同的信号状态作出判断, 从而 控制步进电机的运转模式和运行速度, 同时显示电 机的运作情况和转动速度。系统以 STM 32微控制 器为核心控制部件, 包括电源供给模块, 信号整理模 块, 光耦隔离模块, 数码管显示模块, 步进电机驱动 模块等, 实验系统结构如图 1所示 [ 4] 。
G = 49. 4K /RG + 1
( 1)
其中 G 为 增益, 为 RG 外接电 阻, V CC 为 + 3V
供电电压, VCC- 为 - 3V 供电电源。为防止信号产
生混叠现象, 运用巴特沃斯低通滤波器方法, 设计了 一个无增益的四阶有源低通滤波器 [ 6] 。
图 2 信号调理电路
1. 2 内部 AD转换
图 4 电机驱动电路
2 调速与显示实验
2. 1 调速实验 电路设计中利用电位器阻值的变化, 产生输入
端变化电压值, 通过内部 AD 转换后的数值来改变 脉冲频率和占空比, 从而可对步进电机的运行速度 进行控制。在电路连接中, 电位器一端接地, 另一端 与固定电阻串联接 3. 3V, 同时连接 STM 32的 AD 引 脚, 利用变化的阻值来改变输入电压值。 STM 32根 据内部参考电压将输入模拟电压转 换为对应数字 值。设 置 VR+ = 3. 3V , VR- = 0V , 转 换 公 式 为 N AD C = 4095 ( VIN - VR- ) / ( VR+ + VR- )
3 总结
系统以高性价比的 STM 32为主控制器, 经过运 行调试, 能够很好地捕捉到传感器的信号, 并根据信 号对步进电机的运转方向 与运行速度进行 灵活控 制, 实时性好, 可靠性高, 可扩展性强。相信该设计 的成功能够使得 STM 32在电机控制等诸多实际场 合得到更广泛的应用 [ 10] 。
其中 VR+ 为参考电压正端, VR- 为参考电压负 端, VIN 为输入电压, NADC为转换后数字值。
PWM 由 STM 32内部定时器产生。通过改变相 关寄存器配置来改变脉冲频率与占空比。 PWM 配 置分以下几个步骤: ( 1) 定时器时钟经预分频器分 频后为计数器提供时钟; ( 2) 重装载寄存器和输出 比较寄存器的数值不断与计数器比较; ( 3) 计数器 的数值与重装载寄存器相等时, 复位计数器并翻转 输出信号; ( 4) 计数器数值与输出比较寄存器相等 时, 翻转输出信号。
ISSN 1672- 4305 CN 12 - 1352 /N
实验室科学 LABORATORY SC IEN CE
第 13卷 第 6 期 2010年 12 月 V ol 13 N o 6 D ec 2010
基于 STM 32的步进电机转速控制实验设计
晏英俊, 张自强
( 上海师范大学 信息与机电工程学院, 上海 200234)
参考文献 ( Re ferences):
[ 1] 王永虹, 徐炜. STM 32系列 ARM C ortex- M 3微控制器原理与实 践 [ M ] . 北京: 北京航空航天大学出版社, 2008: 22- 408.
[ 2] 姚文详. ARM C ortex- M 3 权威指 南 [ M ]. 北京: 北京航 空航天 大学出版社, 2009: 1- 263.
本系统采用 STM 32作为主控制器, 其拥有先进 的 Cortex - M 3内核架构, 与传统的 8051, ARM 7TDM I 内核相比有以下优点: ( 1)二级流水线哈佛架构 ( 2)
单周期乘法指令和硬件除法指令, 实现了出色的效率 ( 1. 25DM IPS /MH z) ( 3) 内置快速的中断控制器, 提供 了优越的实时特性 ( 4) 与 ARM7TDM I相比运行速度 最多可快 35% 且代码最多可节省 45% [ 2] 。
A design of step m otor based on STM 32
YAN Y ing- jun, ZHANG Z i- qiang
( Co llege of Info rm ation and E lectrom echanical Eng ineering, Shanghai Norm a l Un iversity, Shangha i 200234, China)
除了内核性能出众之外, STM 32在功耗控制和 开发周期等方面也表现出色。与传统的单片机控制 相比, STM 32提供了三种低功耗模式和灵活的时钟 控制机制, 用户可根据所需耗电要求进行合理优化。 同时 STM 32有丰富外设功能, 从而使系统的整体性 能得到提升。 ST 还提供了完整的开发工具和库函 数, 使得用户方便地访问 STM 32各个标准外设。因
图 1 系统结构
传感器信号采样是对外部传感器送入的信号进 行放大 滤波, 将整 理过 的信 号传 给 STM 32。随后 STM 32将传入的模拟信号进行内部 AD转换, 根据
转换结果作出相应决策, 将正转、停止、反转等信号 送给电机驱动模块, 同时将状 态发送给显示模 块。 由于 STM 32的供电电压与驱动电机的供电电压不 同, 需要进行电压隔离。因此添加光电耦合模块来 避免电压差所造成的电路影响和器件损坏。电机驱 动模块中的驱动芯片将接收到的电平信号和 PWM 信号转换为驱动信号, 从而实现对步进电机控制与 调速 [ 5] 。
[ 3] 薛钧义. 微机控制 系统及其 应用 [M ]. 西安: 西 安交通 大学出 版社, 2003: 203- 268.
[ 4] 张志杰, 赵旭. 等. 单片机实验 教学改革初探 [ J]. 实验科学与 技术, 2008, 6( 1) : 86 - 88.
[ 5] 徐煜明. 步进 电机速 度控 制的研 究与 实现 [ J] . 工矿 自动化, 2007 ( 2) : 82 - 84.
晏英俊, 等: 基于 STM 32的步进电机转速控制实验设计
61
VSS, ห้องสมุดไป่ตู้SS可接 4. 5~ 7 V 电压。 VS接电源电压 2. 5 ~ 46 V, 输出电流 可达 2. 5A, 可 驱动电感 性负载。 内部包含四通道逻辑驱动电路, 可以方便的驱动两 个直流电机或一个两相步进电机。
电机驱动电路如图 4所示, CPU 通过 IN1- IN4 将信号送入 L298N芯片, 通过电平的变换控制电机 运动方向; 通过给 ENA、ENB发送 PWM 信号对电机 进 行 调 速, PWM 信 号 由 STM 32 内 部 进 行 设 置 产生 [ 8] 。