哈尔滨工业大学 航天器轨道动力学作业参考
航天器姿态动力学与控制(哈尔滨工业大学) ——李立涛

第4章 自旋、双自旋航天器姿态动力学
不变平面和不变线的定义 Poinsot椭圆在不变平面上的无滑动滚动
第4章 自旋、双自旋航天器姿态动力学
推力倾斜的自旋航天器
第4章 自旋、双自旋航天器姿态动力学
带有姿控推力器的自旋航天器
第4章 自旋、双自旋航天器姿态动力学
美国探险者一号卫星
第4章 自旋、双自旋航天器姿态动力学
Cz
C S
SC SC S
C S SSC CC
S S SCC
CS
S
CC
tan
1
C21 C22
sin1 C23
tan
1
C13 C33
有能量耗损时的本体极迹
第4章 自旋、双自旋航天器姿态动力学
一般准刚体的姿态动力学模型
x
Iy Iz Ix
yz
Mx Ix
T
(Ix
I
2 x
x / Iz )x2 (I y
I
2 y
/ Iz )y2
y
Iz Ix Iy
xz
My Iy
T
(Ix
I
2 x
y / Iz )x2 (I y
Cba Cz Cx Cz SC CC S
S S
CS SCC SS CCC
S C
SS
C
S
C
tg
1
C31 C32
航天器综合测试作业【哈工大】
航天器综合测试作业1.卫星系统组成:结构与机构、电源与配电、测控(通信)、数管(综合电子)、姿态与轨道控制、热控、总体电路、有效载荷2.测试分类:(1)按研究阶段分类方案原理性验证、模样测试、正样测试、飞行试验。
根据实际情况还可能增加应用阶段的飞行试验、飞行前检验(2)按系统规模分类元器件级测试、设备级测试、分系统级测试、整星测试3.测试系统组成:计算机、测量、激励、匹配转换器、被测设备4.测试系统发展趋势:(1)50年代非电量转换为电量测量(2)60年代电子测量替代机械开关测量(3)70年代计算机辅助测量(4)80年代微处理器自动测量(5)90年代分布式测量(6)00年代网络测量(7)10年代智能测量、嵌入式测量最终测试目标将是全自主、嵌入式、智能测试、免测试(省去人工干预)5.根据测试项目设计测试方法(1)蓄电池充放电功能测试方法:首先对充电控制器设定一条充电控制曲线(V-T曲线),然后使SAS通过星上充电控制器对电池充电,并监测充电电流及充电控制器的充电状态,当充电控制器结束对蓄电池的充电后,按照上述方法计算并判断电池的充电量是否已达到电池的额定容量。
(2)蓄电池放电功能测试方法采用模拟负载或卫星其他分系统作为负载,使用蓄电池供电,将蓄电池充满,观测放电过程,同时避免过放电。
6.蓄电池过充过放的危害(1)蓄电池过充电的危害蓄电池充电电流大于蓄电池可接受电流时会过充电,产生电解水的副反应,发生热量,使电池温度不正常升高,若不加以控制,会造成大量失水、电容量下降、变形等故障。
(2)蓄电池过放电的危害蓄电池放电到标准终止电压的时候内阻会变大,电池电解液浓度会变得非常稀薄,进而严重损害蓄电池的电气性能及循环使用寿命。
7.电源系统测试应注意的问题(1)太阳电池阵模拟器:模拟太阳阵输出电功率,作为电源使用由计算机程控,模拟卫星进出阴影状态,设置试验状态(2)星表插头:连接太阳阵模拟器到卫星,供电通道,检测火工品状态,火工品保险控制,蓄电池充电、状态监测(3)脱落插头:卫星供电线,设备开关控制线,火工品状态监视线(4)控制台:显示母线电压,负载电流,开关状态,手动控制(5)火工品电路:直接由蓄电池组供电,保证火工品大电流放电的需要;压紧行程开关保护,在星箭分离前处于断开状态,避免干扰及误指令;火工品加电/断电开关,磁保持继电器控制,火工品工作前接通,火工品动作执行后断开;火工品启动开关,非磁保持继电器控制,指令指令期间处于接通状态;回路保护插头,保护装置,卫星对运载对接后接通;静电泄漏保护电阻,为火工品提供静电泄漏通路,避免静电干扰引起误爆。
航天飞行动力学作业报告-轨道仿真及转移质量计算

航天飞行动力学作业报告——轨道仿真及转移质量计算一、问题描述1、在已知条件下考虑J2项摄动和大气阻力摄动,计算仿真航天器轨道在一年之内的变化特性,并绘制其图像。
2、在轨运行一年后,采用Hohmann 机动使轨道回到标称轨道,计算所要消耗的推进剂的质量。
二、模型建立在仅考虑J2项摄动和大气阻力摄动的假设下,可得到下列公式进行求解。
sin (1)cos ]cos (1)sin sin()cot ]sin (1)sin (1cos )]u r u u h h r u h r u r u dp dt de r er a f a f a dt p p d dt di dt d r er a f a f a f i dt p pdf f r dt e p da a e f a e f dt ωω==+++Ω===−++−+−+=++2r u dM r r f e a dt p p +−+其中r u h a a a 为摄动加速度在径向、横向、副法向方向上的加速度分量,可以用下列公式得到。
Da g a ∆=∆+22222222222222223[13sin sin ()]23sin sin[2()]23sin sin()2e r e u e h R g J i f r rR g J i f r rR g J i f r r µωµωµω∆=−−+∆=−+∆=−+22sin cos Dr Du a v a v σργσργ=−=−通过matlab 对上式进行数值迭代求解就可以得到轨道六要素在一年之内的变化特性。
三、求解六要素通过上式的迭代求解可以得到六要素在一年中变化如下:图 3-1 近地点幅角ω图3-2 真近点角f图3-3 离心率e图3-4 半长轴a图3-5 轨道倾角i图3-6 升交点赤经Ω四、六要素的理论分析对于0.25E7 s时候e产生的突变,是因为在迭代数值求解过程中,使用了两组公式分别对应于e很小(近似为圆轨道)以及e不可忽略(按椭圆轨道)的时候,当到0.5E7 s附近时,e不可忽略,de按椭圆轨道计算,会产生一个突增。
轨道专业期末总结
轨道专业期末总结一、导论轨道专业是指以航天器轨道设计、运行控制、空间物理实验为主要研究方向的专业。
在一个国家的科技事业中,航天事业一直被人们所关注和重视,轨道专业是航天事业的重要组成部分。
本文将对轨道专业的学习内容、学习方法、实践活动等进行总结和反思,以期对以后的学习和发展有所启迪和帮助。
二、学习内容总结1. 数学物理基础:轨道专业作为一门理工科学科,必然要有坚实的数学和物理基础。
在学习过程中,我们接触了很多数学和物理知识,如微积分、线性代数、力学、电磁学等等。
这些基础知识为后期学习其他专业课程打下了坚实的基础。
2. 航天器动力学:航天器动力学是轨道专业的核心内容之一。
在这门课程中,我们学习了航天器的运动规律、运动状态描述、轨道参数计算等知识。
通过对这门课程的学习,我对航天器的运动特性、轨道设计等有了更深入的了解。
3. 航天器控制:航天器控制是轨道专业的另一个核心内容。
在这门课程中,我们学习了航天器的姿态控制、轨道控制、姿态测量等内容。
通过对这门课程的学习,我对航天器的控制方法和技术有了更深入的了解。
4. 航天工程管理:在航天项目中,管理是非常重要的一环。
在这门课程中,我们学习了航天项目的计划、组织、执行、控制等内容。
通过对这门课程的学习,我对航天项目的整体运作有了更深入的了解。
5. 空间物理实验:空间物理实验是轨道专业的实践环节之一。
在实验室中,我们通过实际操作来学习空间物理实验的原理和方法。
通过这些实验,我们不仅提高了实验操作能力,还深入了解了航天物理的一些基本原理。
三、学习方法总结1. 多思考、多交流:学习轨道专业需要有很强的思维能力和团队协作能力。
在学习过程中,我们要多思考问题,善于分析和解决问题。
同时,与同学们进行多次讨论和交流也是提高学习效果的好办法。
2. 多实践、多实习:学习轨道专业不仅要掌握理论知识,还需要有实际操作的能力。
因此,在学习过程中,我们要多参加实验和实习活动,提高实践能力和实践经验。
哈工大航天学院课程-空间飞行器动力学与控制-第1课-绪论

“礼炮1号”空间站
空间飞行器动力学与控制 第一课 绪论
1981年4月,世界上第一 架垂直起飞、水平着陆、可 重复使用的美国航天飞机 “哥伦比亚号”试飞成功, 标志着航天运载器由一次性 使用的运载火箭转向重复使 用的航天运载器的新阶段, 标志着人类在空间时代又上 了一层楼,进入了航天飞机 时代。
美国“哥伦比亚号”航天飞机
空间飞行器动力学与控制 第一课 绪论
人类自20世纪60年 代开始探测火星的尝试。 大约半数火星探测任务 成功。 2008年05月25日 , 美国“凤凰”号火星探 测器成功降落在火星北 极区域,其核心任务是 寻找水和生命痕迹。 2008年11月,凤凰 号与地面控制中心失去 联络。
“凤凰”号挖掘臂挖掘火星土壤的情景
空间飞行器动力学与控制 第一课 绪论
1988年11月15日,前苏联的暴风雪号航天飞机从 拜科努尔航天中心首次发射升空,47分钟后进入距 地面 250公里的圆形轨道。它绕地球飞行两圈,在 太空遨游三小时后,按预定计划于 9时25分安全返 航,准确降落在离发射点12公里外的混凝土跑道上, 完成了一次无人驾驶的试验飞行。
“水手2号”探测器
空间飞行器动力学与控制 第一课 绪论
1966年1月,前苏联两艘载人飞船第一次在轨道上成功 交会对接,并实现了两位航天员从一艘飞船向另一艘飞船 的转移。
前苏联“联盟号”载人飞船
前苏联“上升号”载人飞船
空间飞行器动力学与控制 第一课 绪论
1971年4月19日,前苏联“礼炮1号”空间站入 轨成功,其质量约18t,总长14m,轨道高度200~ 250 km,轨道倾角51.6º ,成为人类第一个空间站。
空间飞行器动力学与控制 第一课 绪论
13~14世纪,中国的火箭技术与其他火药兵器一 同传到阿拉伯国家和印度,后又传入欧洲。至18世 纪后期,印度军队在抗击英国和法国军队的多次战 争中就曾大量使用火药火箭并取得了成功结果,由 此推动了欧洲火箭技术的发展。 曾在印度作战的英国人康格里夫(William Congreve)在19世纪初对印度火箭作了改进,他确定 了黑火药的多种配方,改善了制造方法并使火箭系 列化,最大射程可达3km。这些初期火箭的原理都 成为了近代火箭技术的最初基础。
航天飞行动力学作业及答案(2)
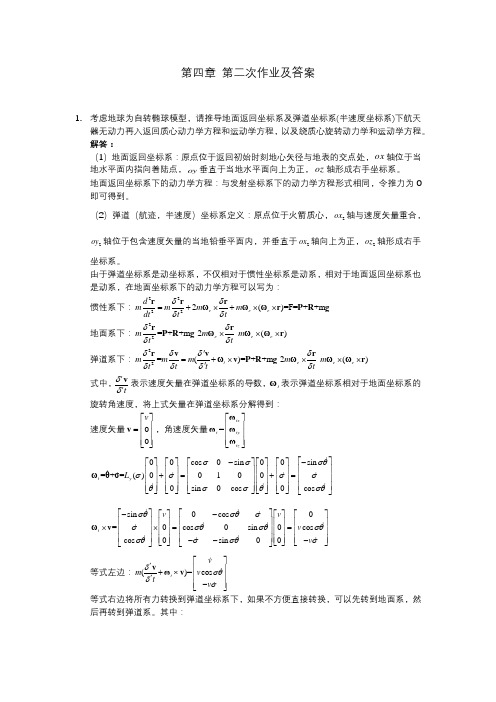
第四章 第二次作业及答案1. 考虑地球为自转椭球模型,请推导地面返回坐标系及弹道坐标系(半速度坐标系)下航天器无动力再入返回质心动力学方程和运动学方程,以及绕质心旋转动力学和运动学方程。
解答:(1)地面返回坐标系:原点位于返回初始时刻地心矢径与地表的交点处,ox 轴位于当地水平面内指向着陆点,oy 垂直于当地水平面向上为正,oz 轴形成右手坐标系。
地面返回坐标系下的动力学方程:与发射坐标系下的动力学方程形式相同,令推力为0即可得到。
(2)弹道(航迹,半速度)坐标系定义:原点位于火箭质心,2ox 轴与速度矢量重合,2oy 轴位于包含速度矢量的当地铅垂平面内,并垂直于2ox 轴向上为正,2oz 轴形成右手坐标系。
由于弹道坐标系是动坐标系,不仅相对于惯性坐标系是动系,相对于地面返回坐标系也是动系,在地面坐标系下的动力学方程可以写为:惯性系下:22222()=F=++m e e e d m m m m t dt tδδδδ=+⨯+⨯⨯r r rωωωr P R g地面系下:22=++m -2-()e e e m m m t tδδδδ⨯⨯⨯r rP R g ωωωr弹道系下:22=()=++m -2-()t e e e m m m m m t t t tδδδδδδδδ'=+⨯⨯⨯⨯'r v v rωv P R g ωωωr 式中,tδδ''v 表示速度矢量在弹道坐标系的导数,t ω表示弹道坐标系相对于地面坐标系的旋转角速度,将上式矢量在弹道坐标系分解得到:速度矢量00v ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦v ,角速度矢量=tx t ty tz ⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦ωωωω 00cos 0sin 00sin =+=()001000sin 0cos 0cos t y L σσσθσσσσθσσθσθ⎡⎤--⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥+=+=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦ωθσ sin 0cos 0=0cos 0sin 0cos cos 0sin 00t v v v v σθσθσσσθσθσθσθσσθσ⎡⎤⎡⎤--⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⨯⨯==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦ωv 等式左边:()=cos t vm v tv δσθδσ⎡⎤'⎢⎥+⨯⎢⎥'⎢⎥-⎣⎦vωv 等式右边将所有力转换到弹道坐标系下,如果不方便直接转换,可以先转到地面系,然后再转到弹道系。
(完整版)哈工大深空探测轨道设计作业_地球至火星轨道设计
目录1.1研究现状及分析 (2)1.1.1 发射窗口 (4)1.1.2火星探测轨道设计 (5)1.1.3火星探测轨道优化 (7)1.2轨道基础知识 (9)1.2.1时间系统 (9)1.2.2坐标系统 (10)1.2.3星历数据 (11)1.2.4B平面 (11)1.2.5Lambert问题 (12)1.3火星探测直接转移轨道的初步设计 (13)1.3.1日心轨道设计及发射窗口的搜索 (13)1.3.2地心段参数的确定 (15)1.3.3火心段参数的确定 (19)1.4 基于B平面参数的精确轨道设计 (20)1.4.1 问题描述 (20)1.4.2 制导方法 (21)1.4.3 轨道精确设计求解 (22)1.4仿真分析 (23)1.4.1初步轨道参数设计结果 (24)1.4.2 精确轨道参数设计结果 (26)1.5结论 (27)I- 2 - 地球——火星转移轨道设计轨道设计是火星探测任务的基础,在设计出精确轨道前,一般都忽略次要因素,以二体模型为基础设计一条简单的轨道来满足任务的要求。
本章采用普适变量方法求解Lambert 问题,并给出基于pork-chop 图以及优化算法两种方法对发射窗口进行搜索,基于此窗口对转移轨道进行初步设计和精确设计。
1.1 研究现状及分析近十年来火星探测已成为科学家们开展空间研究的主流趋势之一,火星是太阳系内与地球最接近的一颗行星,它们有很多共同特征。
自从水被证实在其上存在后,有存在生命的可能是人类目前对火星感兴趣的主要原因之一,此推动了科学研究,在之后每一个合适的发射窗口,都有新型的行星际探测器飞往火星,并携带科学设备用来研究火星的大气与表面,以及发现一些新奇的现象。
在过去的50年里,仅美国在火星探测研究的经费已超过了100亿美金,而在不远的将来他们计划开展大量的火星科学探测活动。
目前,包括俄罗斯航天局在内的世界各大航天机构正在考虑发射载人探测器到火星上的可能性,而确定这样的计划后使得火星探测基础理论研究、技术支持和工程实验迅猛发展,此时我国开展火星探测是及时的,在自主研发的基础上,借鉴外国经验,发展我国自己的火星探测技术,开拓空间资源和领域,促使太空经济蓬勃发展。
轨道动力学试题及答案高中

轨道动力学试题及答案高中一、选择题1. 轨道动力学研究的是天体在什么力的作用下的运动?A. 重力B. 电磁力C. 强相互作用力D. 弱相互作用力答案:A2. 根据开普勒第一定律,所有行星绕太阳的运动轨道都是什么形状?A. 圆形B. 椭圆形C. 抛物线D. 双曲线答案:B3. 开普勒第三定律表明了什么关系?A. 行星轨道的半长轴与公转周期的平方成正比B. 行星轨道的半长轴与公转周期成正比C. 行星轨道的半短轴与公转周期的平方成正比D. 行星公转周期与太阳质量成正比答案:A4. 轨道动力学中的“轨道周期”是指什么?A. 行星绕太阳一周的时间B. 行星绕太阳一周的距离C. 行星绕太阳一周的速度D. 行星绕太阳一周的加速度答案:A5. 轨道动力学中的“轨道倾角”是指什么?A. 轨道平面与太阳赤道平面的夹角B. 行星轨道与太阳赤道平面的夹角C. 行星轨道与地球赤道平面的夹角D. 行星轨道与黄道面的夹角答案:D二、填空题6. 轨道动力学中的“离心率”是描述轨道______的量,其值介于0和1之间。
答案:形状7. 根据牛顿万有引力定律,两个物体之间的引力与它们的质量的乘积成正比,与它们之间的距离的平方成______。
答案:反比8. 轨道动力学中的“近日点”是指行星轨道上距离太阳最近的点,而“远日点”是指行星轨道上距离太阳最远的点。
这两个点之间的连线称为______。
答案:主轴三、简答题9. 简述牛顿的万有引力定律。
答案:牛顿的万有引力定律指出,自然界中任何两个物体都是相互吸引的,引力的大小与两物体的质量的乘积成正比,与两物体间距离的平方成反比。
10. 解释什么是轨道的“半长轴”和“半短轴”。
答案:在椭圆轨道中,半长轴是指从轨道中心到轨道上任意一点的距离的最大值,而半短轴是指从轨道中心到轨道上任意一点的距离的最小值。
结束语:通过本试题,我们对轨道动力学的基本概念和原理有了基本的了解。
希望同学们能够通过学习,深入掌握轨道动力学的知识,并能够将这些知识应用到实际问题中去。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
航天器轨道动力学作业1151820220 刘一石1. 试计算地-月二体系统的质心位置和旋转周期,地心处对公共质心的向心加速度是多少? 解:经过查书可得到,地球质量为:245.97610E M kg =⨯月球的质量为:227.34810M M kg =⨯地月平均距离为:384000R km =二体问题其质心在两个物体连起来线段的中间。
设其质心位置距离地球xkm ,则距离月球为()R x km -。
根据二体质心的定义可以有如下关系:()E M M x M R x =-带入已有条件()24225.976107.34810384000x x ⨯=⨯-可以解得4464.26x km = 379335.75R x km -=带入万有引力定律公式2E ME E GM M M a R =有:()1122522286.67384107.34810 3.32210/3.8410M E GM kg a m s R m --⨯⨯⨯===⨯⨯ 2. 如果地球自转 17 周/天,赤道上会发生什么现象?以1000/m s 垂直向上抛出一物体会怎样? 解:若地球自转17周每天,赤道上物体的速度为172172 3.146378140==7881m /243600243600R v s π⨯⨯⨯⨯⨯=⨯⨯赤道由于第一宇宙速度7.9/V km s ≈万有引力提供向心力和重力22GMm v m mg R R =+赤道赤道因此赤道上的重力加速度为2112422226.6738410 5.9761078810.0659/63781406378140GM v g kg s R R -⨯⨯⨯=-=-=赤道赤道 如果以1000/m s 抛出物体,则该物体的速度为7944.19/object v m s ==大于第一宇宙速度,因此将摆脱地球引力。
3. 绘出参数为70000a km =,0.9e =的绕地球椭圆轨道的真近角θ与速度v 、 真近角θ与径向速度V v 和真近角θ与水平速度H v 的关系曲线(1 周的) 解:由于真近角与位置矢量的关系为:()211cos a e r e ϕ-=+因此要求出真近角与速度的关系,相当于求位置矢径大小与速度的关系。
已知轨道半径70000a km =, 轨道离心率0.9e =。
因此轨道的能量方程:222v r aμμ-=- 因此,速度与矢量大小关系为:v =轨道角动量为h ==水平速度为h h v r=径向速度为v v =经过以上分析,利用MATLAB 作图可以得到图 1图 14.试求在轨道参数为a,e的椭圆轨道上,从短轴同一端出发的两个反方向运行的飞行器分别到达短轴另一端的时间。
解,根据定义(如图 2),短轴所对应的偏近点角为12E π=和232E π=,图 2根据平近点角的定义:sin M E e E =-所对应的平近点角分别为:12M e π=-和232M e π=+ 由1→2212M M e π-=+由2→12122M M e ππ-+=-因此:)122t e π==+)212t e π==-另解:由于开普勒第二定律可知,面积比等于时间比,因此他们的面积,因此有如下等式成立:122112122121t t T t S t S +=⎧⎪⎨=⎪⎩ 其中2T =122abS bc π=-212abS bc π=+因此,解上述方程可以得到)122t e π==+)212t e π==-5. 试证明参数为a ,e 的椭圆轨道半径r 对真近角θ, 偏近角ψ, 时间t 的平均值r θ、r ψ、r t分别为b =,a ,()2122a e +解:(1) 轨道半径r 对真近角θ的关系如下()211cos a e r e θθ-=+因此轨道半径r 对真近角θ的平均值如下()222011cos r =22a e d r d e ππθθθθθππ-+=⎰⎰利用Mathematica 积分(程序如下):Integrate[a (1−e^2)(1+e ∗Cos[x])⁄,{x,0,2∗Pi}](2∗Pi)⁄ 得到的结果为:r =)e b θ+== (2) 轨道半径r 对偏近角ψ的关系如下()1cos r a e ψψ=-因此轨道半径r 对偏近角ψ的平均值如下()2201cos r =22r d a e d ππψψθψψππ-=⎰⎰利用Mathematica 积分(程序如下):Integrate[a(1−e ∗Cos[x]),{x,0,2∗Pi}](2∗Pi)⁄得到的结果为:r =a ψ(3) 轨道半径r 对偏近角t 的可以间接用偏近点角表示()1cos r a e ψψ=-由于0n =0sin n t e ψψ=-两端同时求导()0d 1cos d n t e ψψ=-轨道半径r 对偏近角t 的平均值如下200d (1cos )(1cos )d r =2Tr ta e e Tπψψψψψπ--=⎰⎰利用Mathematica 积分(程序如下):Integrate[a ∗(1−e ∗Cos[x])∗(1−e ∗Cos[x]),{x,0,2∗Pi}](2∗Pi)⁄得到的结果为:()21r =22a e ψ+因此问题得证。
6. 从赤道上空向正北发射半径为N r 的圆轨道极轨卫星,考虑到地球自转(角速度ωe )的影响时,轨道倾角和偏心率有多大的偏差? 解:半径为N r 的圆轨道,轨道的速度为ver N v v ==由于地球自转角速度的影响,产生水平分量的大小为para E N v r ω=⋅利用伽利略速度合成法则可知,轨道倾角因此减少90arctanarctanarctan para ver verpara E N v v i v v ∆=-===由于入轨时矢径与速度方向垂直,因此入轨点为轨道的近心点或远心点。
又由于此处相对于圆轨道速度增加,因此为轨道的近心点。
由于近心点速度变为p v ==利用近心点速度公式p v =反推出离心率表达式2232311N p E N E N r v r r e μωωμμμ⋅+⋅⋅=-=-=另解:离心率矢量公式为21()e v r μμ⎡⎤⎛⎫=--⋅ ⎪⎢⎥⎝⎭⎣⎦r r v v由于入轨时矢径与速度方向垂直,因此 0⋅=r v带入速度与位置矢径可得到()2232111E N E N N NN r r v e r r r r r ωωμμμ⎛⎫⋅⎛⎫⋅=-=+-=⎪ ⎪ ⎪⎝⎭⎝⎭ 7. 某卫星在酒泉发射场(东经100,北纬41)上空400km 处以8.5/km s 的速度入轨(设入轨时刻:赤经=经度),速度与当地水平面的夹角为5,方向为东偏北120。
试求卫星的轨道根数并画出该卫星前三周的星下点轨迹。
解:建立发射场坐标系Oxyz ,地心固连坐标系e e e e O x y z ,这两个坐标系的转换关系为:()()z yC C e e e e O x y z Oxyz θψ→−−−−−→其中θ代表经度(东经>0°, 西经<0°),ψ代表经度(北纬<0°,南纬>0°)。
在Oxyz 中,有[6771,0,0]'r km =[0.7408, 4.2338,7.3332]'/v km s =-通过坐标变换,换算到e e e e O x y z 中的位置速度向量。
利用MATLAB 计算(本题附),可以得到:[887.37,5032.5,4442.2]'r km =- [4.9078, 3.4521,6.0205]'/v km s =-再利用第九题程序,可以利用位置速度向量算出轨道六根数如下,半长轴长:8763a km =离心率:0.2426e =轨道倾角:112.17i=近地点角距:19.06ω=升交点赤经:120.75Ω=真近点角:26.05ϕ=因此可以求出轨道的周期为:228163.76T s π=== 利用开普勒方程,求三个周期内的的轨道六根数,再利用轨道六根数与星下点轨迹的坐标转换公式(未考虑地球自转时):()()()arcsin sin sin i ϕωϕ=⋅+纬度()()()=arctan cos tan i λωϕ⋅++Ω000, 23=, 2, πλπωϕππλλππωϕλ⎧-<+<⎪⎪⎪+<+<⎨⎪⎪⎪⎩经度其他 这里的经度还要换算成(],ππ-的区间内,其过程省略,经换算后,东经为正,西经为负,北纬为正,南纬为负。
考虑自转只需要再用经度减去地球自转变化的经度即可。
利用MATLAB 可以求得星下点轨迹如图 3:图 3 本题用到的MATLAB程序:8. 地球卫星轨道参数如下:8000p r km =,18000a r km =,在近地点处施加一个与水平线夹角60、大小为2/km s 的速度脉冲,试求机动后新轨道长轴的转角大小和轨道的参数。
解:根据题意,8000p r km=18000a r km =因此轨道的半长轴长为:130002a pr r a km +==离心率为:50.384613a p a pr r e r r -==≈+ 利用能量方程:222v r aμμ-=- 可以得到:v =带入数据可以得到近心点速度为:8.306/p v km s === 由于与水平线夹角60的条件不唯一,因此分以下两种情况讨论:解1:(与轨道面夹角60)与第6题相同,机动后此处仍为新轨道的近地点。
根据伽利略速度合成法则,得到机动后平行方向速度矢量为1cos 8.30629.306/32new para p v v v km s π⎛⎫=+=+⨯= ⎪⎝⎭得到机动后垂直方向速度矢量为sin 2 1.732/3newver v v km s π⎛⎫=== ⎪⎝⎭轨道倾角的变化量为1.732arctan arctan 10.549.306new ver new para v i v ∆===轨道半长轴变化为11225229.306 1.732396688000 3.98610new pnew p v a km r μ--⎛⎫⎛⎫+=-=-≈ ⎪ ⎪ ⎪⨯⎝⎭⎝⎭轨道离心率变化为8000110.798339668new p r e a=-=-=由于在近心点机动,新的轨道较原轨道相比,轨道的近地点角距,升焦点赤经,真近点角不发生变化。
解2:(与水平面夹角60)机动后轨道参数如下:8000p r km=9.4658/new v km s ===sin 60arcsin0.184newv rad v β==利用平面单脉冲机动公式:222sin cos tan cos 1rv rv ββμθβμ⎛⎫ ⎪⎝⎭=⎛⎫- ⎪⎝⎭22222=1cos sin rv e ββμ⎛⎫-+ ⎪⎝⎭22ra rv μ=-可以得到新参数的变换为:0.413023.66rad θ===0.8059e43.966710a km =⨯由于u 在同平面内轨道机动是不变量,因此ω较原来减少23.669. 已知某航天器在地心惯性坐标系中的位置和速度矢量分别为[3729.5,1644.6,5163.0]'r km =-,[2.1319,7.2964,3.8642]'/v km s =-,试计算该航天器的 6 个轨道根数。