动生电动势和感生电动势解读
动生电动势和感生电动势
§ 6-2 动生电动势和感生电动势动生电动势:回路或其一部分在磁场中的相对运动所产生的感应电动势。
感生电动势:仅由磁场的变化而产生的感应电动势。
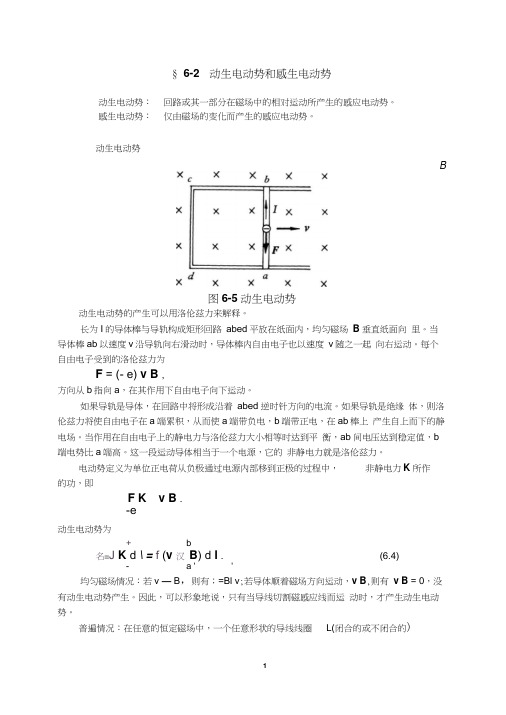
动生电动势B图6-5动生电动势动生电动势的产生可以用洛伦兹力来解释。
长为I的导体棒与导轨构成矩形回路abed平放在纸面内,均匀磁场B垂直纸面向里。
当导体棒ab以速度v沿导轨向右滑动时,导体棒内自由电子也以速度v随之一起向右运动。
每个自由电子受到的洛伦兹力为F = (- e) v B ,方向从b指向a,在其作用下自由电子向下运动。
如果导轨是导体,在回路中将形成沿着abed逆时针方向的电流。
如果导轨是绝缘体,则洛伦兹力将使自由电子在a端累积,从而使a端带负电,b端带正电,在ab棒上产生自上而下的静电场。
当作用在自由电子上的静电力与洛伦兹力大小相等时达到平衡,ab间电压达到稳定值,b 端电势比a端高。
这一段运动导体相当于一个电源,它的非静电力就是洛伦兹力。
电动势定义为单位正电荷从负极通过电源内部移到正极的过程中,非静电力K所作的功,即F K v B .-e动生电动势为+ b名=J K d \ =f (v 汉B) d l . (6.4)- a ' '均匀磁场情况:若v — B,则有;=Bl v;若导体顺着磁场方向运动,v B,则有v B = 0,没有动生电动势产生。
因此,可以形象地说,只有当导线切割磁感应线而运动时,才产生动生电动势。
普遍情况:在任意的恒定磁场中,一个任意形状的导线线圈L(闭合的或不闭合的)在运动或发生形变时,各个线元dl 的速度v 的大小和方向都可能是不同的。
这时,在整 个线圈L 中产生的动生电动势为=(v B ) d l .(L)图6-6洛伦兹力不作功洛伦兹力对电荷不作功:洛伦兹力总是垂直于电荷的运动速度,即 F v_ v ,因此洛 伦兹力对电荷不作功。
然而,当导体棒与导轨构成回路时会有感应电流出现,这时感应 电动势却是要作功的。
第19讲动生电动势与感生电动势
解:由 B 0, 与B同向 感生电场沿逆时针。 t
取逆时针回路, r < R 时
l Ei dl
B dS S t
l
Ei
dl
cos
0
B t
dS
cos
Ei
2
r
dB dt
r2
r dB Ei 2 dt
××××× ×××××××
r × × × × × × ×
×××××××
×R× × × × B
r > R时,
3. 动生电动势的计算
作为电源的这段运动导体杆,其中的洛仑兹力 是非静电力。
非静电力 对应的非静电场强 由电动势定义
Fk e(v B)
Ek
Fk e
v
B
i Ek dl
运动导线ab产生的动生电动势为
i
(v B) dl
l
例题1 有一半圆形金属导线在匀强磁场中作切 割磁力线运动。已知 v, B, R. 求动生电动势.
解:
d (v B)dl
dl Rd v B
vB sin900 dl cos
2
vBR cos d 2 vB2R 有效段!
b dl
d
v
0:与假定的方向相同
R
B
方向:a b
a
例题2 如图,长为L 的铜棒在匀强磁场中以角速度 ω绕 o 轴转动。求:棒中感应电动势的大小 和方向。
解:取如图所示微元(此微元暗示了假定的正方向)
C × × ×O× ×
B t
Ei Dx
L
d Ei dx cos
r dB dx cos
2 dt
r dB Ei 2 dt
逆时针
r cos h
12.2 动生电动势和感生电动势
此时电荷积累停止, 两端形成稳定的电势差 两端形成稳定的电势差。 此时电荷积累停止,ab两端形成稳定的电势差。 洛仑兹力是产生动生电动势的根本原因 洛仑兹力是产生动生电动势的根本原因. 是产生动生电动势的根本原因
动生电动势的公式
非静电力
f = −e(v × B)
f 定义 Ek为非静电场强 Ek = = v ×B −e
S
A B ××× ×
ω ××v × ×
非均匀磁场
例 一直导线CD在一无限长直电流磁场中作 一直导线 在一无限长直电流磁场中作 切割磁力线运动。 切割磁力线运动。求:动生电动势。 动生电动势。 解:方法一
dε = ( v × B )⋅ dl I l dl µ0I 0 0 D sin90 dl cos180 =v C 2πl b a µ0vI dl =− 方向 D→C → 2πl µ0vI a+b dl µ0vI a + b ε =− ∫a l = − 2π ln a 2π
×××× ⊗ o ×××× B ×××× h
C
∂B ∂t
××
L
D
解:
ε i = ∫ E涡 • dl
L
r dB E涡 = 2 dt
dε = E涡 • dl r dB dl cosθ = 2 dt
h dB dl = 2 dt
⊗o
B
⊗
θ
∂B ∂t
E涡
r h
l dl
L
θ
C
D
h dB 1 dB εCD = ∫L dl = 2hL dt 2 dt
O
解:方法一 取微元
dε = ( v × B )⋅ dl
= Bvdl = Blωdl
εi = ∫ dεi = ∫0 Blωdl
动生电动势与感生电动势

【解】由于金属棒处在通电导线的非均匀磁场中,因此必
须将金属棒分成很多长度元dx,规定其方向由A指向B。这样 在每一dx处的磁场可以看作是均匀的,其磁感应强度的大小为
B 0I
2x
根据动生电动势的公式可知,dx小段上的动生电动势为
d动
(v
B)
dl
Bv
cos
dx
0I
2x
vdx
由于所有长度元上产生的动生电动势的方向都相同,所以金
d
dt
d dt
S
B
dS
又根据电动势的定义可得
L EK dl
式中,EK为感生电场的电场强度。感生电场的电场强度是 非静电性场强。
则有
L EK
dl
d dt
B dS B dS
s
s t
dB
s
S t
若闭合回路是静止的,即所包围面积S不随时间变化,即
S 0 ,则上式可写成
t
B L EK dl s t dS
性场强为
Ek
fL (e)
vB
根据电动势的定义可得,动生电动势为
a
动
L Ek
dl
(v B) dl
b
上式是动生电动势的一般表达式。由上式可知,动生电动势
的方向是非静电性场强 Ek v B 在运动导线上投影的指向。
【例9-2】如下图所示,长直导线 中通有电流I=10A,有一长l=0.1m的 金属棒AB,以v=4m·s-2的速度平行于 长直导线作匀速运动,棒离导线较近的 一端到导线的距离a=0.1m,求金属棒 中的动生电动势。
1861年,英国物理学家麦克斯韦提出感生电场的假设,认为 由于磁场变化而产生一种电场,是这个电场使导体中自由电子作 定向运动而形成电流。麦克斯韦还认为,即使没有导体,这种电 场同样存在。这种由变化磁场激发的电场称为感生电场。
感生、动生电动势
v dx
v 和 B 的夹角: θ1 = π / 2, V × B 与dx 的夹 的夹角:
二、动生电动势
r r r r r r fL r 由 f L = − e ( v × B ) 得: E k = =v×B −e + r r + r r r 代入 ε = ∫ Ek ⋅dl 得: ε = ∫ ( v × B ) ⋅d l
−
−
大小: 大小: ε =
r r − θ 1为 v与B的夹角; 的夹角;
dε i = E感dl cos θ
× × × × × × R × × × × × × × o h× × × r × θ × × ×θ B dl × L ×
r dB E感 = 由上题结果, 由上题结果,圆形区域内部的感生电场: 圆形区域内部的感生电场: 2 dt
−
ε i = ∫ dε i = ∫ E感dl cosθ
∫
L
动生电动势的求解可以采用两种方法: 动生电动势的求解可以采用两种方法:一是利用 一是利用 “动生电动势”的公式来计算; 的公式来计算;二是设法构成一种合理 的闭合回路以便于应用“法拉第电磁感应定律”求解。 求解。
三、应用动生电动势的解题方法
公式: 公式: ε
= ∫ vBdl sin θ1 cosθ 2
∫ vB dl sin θ
+
1
r r r θ 2为 v × B 与 d l 的夹角。 的夹角。
cos θ 2
方向: 方向:电动势方向从负极到正极。 电动势方向从负极到正极。 以上结论普遍成立。 以上结论普遍成立 。 如果整个回路都在磁场中运动, ,则在回路中产生的总 如果整个回路都在磁场中运动 r r r 的电动势为: 的电动势为: ε = ( v × B ) ⋅ d l
动生电动势和感生电动势

Ek
1 2
B t
r
1 2
kr
2. r > R 区域
作半径为 r 的环形路径,并以逆
时针为回路绕向,则同理有
2rEk
S
B t
ds
R2k
R
o
r
r
B
1 B R2 1 R2
Ek 2 t
r
k 2r
Foundation - SJYGGF
§ 13.2 动生电动势和感生电动势
Nov 5, 2002 9/33
随时间均匀增加, dB k dt
若铝圆盘的电导率为γ,求盘内 的感应电流。
见书P212页,例4
R
解: 取半径为r、宽为dr的圆环微 元,并以逆时针方向为正方向,则 微元环中元电动势为
d L Ek dl L Ek dl
1 kr 2r dl kr2
20
o
r
dr
B
微元环中的电阻为 dR 1 2r hdr
Foundation - SJYGGF
§ 13.2 动生电动势和感生电动势
Nov 5, 2002 21/33
4) 电度表记录电量
电度表记录用电量,就是
利用通有交流电的铁心产生交
变的磁场,在缝隙处铝盘上产
o
生涡电流,涡电流的磁场与电
磁铁的磁场作用,表盘受到一
转动力矩,使表盘转动。
o’
Foundation - SJYGGF
感生电动势
1. 感生电动势——回路不动或不变,因磁场随时间变 化产生的电动势。相应的电流称为感生电流。
2. 感生电动势的起源——感生电场Ek 1) Maxwell感生电场(涡旋电场)假设
Maxwell 1861年首先从理论上预言感生电场的存在,后 被Hertz的电磁波实验所证实。Maxwell假设: 变化的磁场要在其周围空间激发一种电场——感生电场
《大学物理》6.2动生电动势感生电动势解读
b
B B 1 2 dS 解: bc R S t t 2
B 0 t
× ×
O × × × ×
uc ub
a
× ×
上页
b E c
下页
四、涡电流
产生原因: 大块的金属导体处在变化的磁场中时,通过金属 块的磁通量发生变化,从而产生感应电动势,在 金属内部形成电流,称为涡电流。 涡电流特点:
A
G
E
B
。。
下页
如何度量这种本领? ε----电动势
上页
电动势: 电源把单位正电荷经内电路从 负极移到正极的过程中,非静 电力Fk所作的功 从场的观点: 非静电力对应非静电场
A非 q
q
E0
Fk qEk A非 Fk dl q Ek dl Ek dl
d 1.热效应: i dt
I
i
R
I(ω)
Q I 2 Rt 2
表明: 交流电频率越高发热越多——感应加 热原理
I(ω)
I(ω) I(ω)
I’
2.磁效应: 阻尼摆
上页 下页
小结:
动生电动势:磁场分布不变, 回路或导线在磁场中运动而引起的感应电动
势 感生电动势:导体回路不动,磁场随时间发生变化而引起的感应电动势
静电场
静止电荷
涡旋电场
变化磁场
有源场
无源场
上页 下页
感生电动势的计算 法拉第电磁感应定律
i
L
d d Ek dl
dt
dt
S B d S
因为回路固定不动,磁通量的变化仅来自磁场的变化
动生电动势与感生电动势
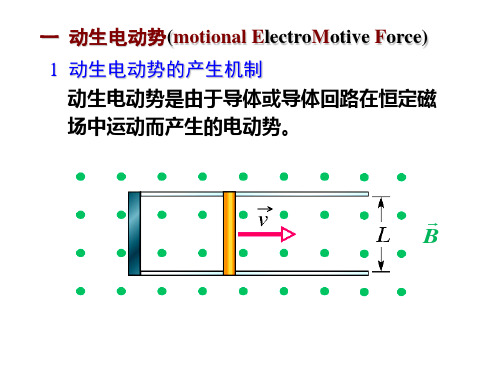
Science &Technology Vision 科技视界1动生电动势如图1,一根金属棒在匀强磁场中沿与棒和磁场垂直的方向以速度V0向右运动。
自由电荷(电子)随棒运动。
必然受到洛仑磁力作用,而发生运动。
电子沿棒运动的速度为U。
这样自由电子具有随金属棒运动的速度V0同时还有沿棒运动的速度U,故自由电子相对磁场的合速度为V0。
金属棒ab 两端因正负电荷分别积累,而形成电动势,Uab>0。
图1由左手定则可知,由于自由电子相对磁场以速度V 运动,一定会受到洛仑磁力F 洛。
当F 洛的分力F1与F 外平衡,F 洛的另一分力F2与电场力FE 平衡时,金属棒两端建立了稳定的动生电动势。
F 洛=eBV 其分力F1=eBVcosα=eBu,F2=eBVsinα=eBV0金属棒ab 两端电动势U=BLV0,自由电子受到的电场力FE=eE=eBLV0/L=eBV0FE 与F2等大反向。
F 外与F1等大反向(图2)。
图2F E 与F 外的合力F'=eB V 02+U 2√=eBVH 合和F 洛等大反向。
此时自由电子受到的三个力F 洛、F 外、F E 作用达到平衡。
金属棒匀速垂直切割磁感线运动建立了稳定的电动势。
E=BLV 0从能量转化的观点来看:外力克服洛仑磁力的分力F1做功,机械能转化的电能。
在此过程中洛仑磁力起到中转能量的作用。
使机械能和电能之间发生转化。
那么洛仑磁力是否做功呢:F 洛的分力F 1与V 0反向做负功W1,另一分力F2与电子沿棒移动方向U 一致做正功W2,则有:W1=-F 1V 0t=-eBIV 0t W2=F 2Ut=eBV 0Ut W=W1+W1=0其实洛仑磁力F H 合与电子合速度V 垂直,其做功为零是肯定的。
我们可以看到动生电动势有以下几个特点:a.在能量转化上是机械能转化为电能。
b.洛仑磁力参与其全过程并传递能量,实现两种形式的能量转化。
c.因为洛仑磁力与自由电荷合速度方向垂直,洛仑磁力不做功。
高中物理 4.5感生电动势和动生电动势课件
链接——生活中的素材 北京市教委透露,2016 年高考改革要点中,语文从 150 分上调到 180 分。 高考语文分数增加 30 分,这不仅是一种简单的分值调整,意味着高考指挥棒的 价值导向终于进行了调整和偏转:语文学科在基础教育中的重要性得到了强化。 这会让孩子们学习语文、学习国语的积极性、自觉性和趣味性,得到空前推进 和提升,正如歌曲《中国话》所唱到的,“最爱说的话永远是中国话,字正腔圆 落地有声说话最算话;最爱写的字是先生教的方块字,横平竖直堂堂正正做人 要像它”。高考语文分数增加,可以让祖国语言文字自豪感、民族文化自豪感、 民族文化自信力,得到现代化的继承和发扬光大。
感生电场的方向类 似感应电流方向的 判定----安培定则
实际应用
电子感应加速器
竖直向上
逆 穿过真空室内磁场的方向 时 针 由图知电子沿什么方向运动
要使电子沿此方向加速, 感生电场的方向如何 顺 时 由感生电场引起的磁场方 针 向如何 向下
原磁场在增强,即电流在 增大。
二、理论探究动生电动势的产生
[话题·互动] 话题:有人认为《汉字王国中的“人”》是一篇专业论文,也有人认为这 是一篇文化散文,其中包含许多小故事。对此你有何看法?
学生甲:这是一篇专业论文。林西莉对汉字研究是下了苦功的。她是在教 学和研究的基础上写就这篇文章的。其间,这位“汉字迷”跋山涉水,足迹遍 布世界各地,心里时时记挂着汉字,发现他人所未见,思考他人所未想。搜集 了大量资料、图片、实物,提出了许多新颖而又专业的见解。文章以图文并茂 的形式讲述中国文字“人”以及与“人”相关汉字的起源和特点,其中选取十 多个与人类及人体不同部位有关的汉字进行细致的讲解,同时分析和描述中国 人的生活方式和风俗习惯,从而使人加深对文字的理解。每一页都图文并茂, 有甲骨文、金文、现代文字的演变过程,也有各个朝代(包括现代)的各种图片。
动生和感生电动势
目录
• 动生电动势 • 感生电动势 • 比较动生和感生电动势 • 实例分析 • 问题与讨论
01
CATALOGUE
动生电动势
定义与原理
定义
动生电动势是指由导体在磁场中运动而产生的感应电动势。
原理
根据法拉第电磁感应定律,当导体在磁场中运动时,导体中 的电子会受到洛伦兹力的作用,从而在导体两端产生电动势 。
感生电动势的大小取决于磁场的变化率。如果磁场变化很快,那么产生的电动势就很大。
应用比较
动生电动势在电力生产和传输中起着关键作用。例如,发电机是通过动生电动势将机械能转化为电能 。
感生电动势在电子设备和磁性材料中有着广泛的应用。例如,变压器和电感器是通过感生电动势来改 变信号和传输能量。
04
CATALOGUE
电磁制动
在某些机械设备中,利用 动生电动势可以实现电磁 制动,达到减速或停止的 目的。
电磁感应现象
动生电动势是电磁感应现 象的一种表现形式,可以 用来解释和利用电磁感应 现象。
02
CATALOGUE
感生电动势
定义与原理
定义
感生电动势是指磁场变化时在导体中产生的电动势。
原理
根据法拉第电磁感应定律,当一个导体处于变化的磁场中时,导体中的自由电子 会受到洛伦兹力的作用,从而在导体两端产生电动势。
电子感应加速器
利用感生电动势加速带电粒子。
03
CATALOGUE
比较动生和感生电动势
产生方式比较
动生电动势
是由磁场和导线的相对运动引起的。当 导线切割磁力线时,导线两端会感应出 电动势。
VS
感生电动势
是由磁场的变化引起的。当磁场发生变化 时,附近的导体中会产生感应电流和电动 势。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
e
3、动生电动势的计算方法
根据电动势的定义,得导线L的动生电动势为:
动
E非d l
电源内ຫໍສະໝຸດ (v B)d lL
vBsin cosdl
L
讨论:
1)
为
v与
B
夹角,
为 d l 与
v B (E非静电场力 )
夹角。
6
8-2 动生电动势和感生电动势
2
8-2 动生电动势和感生电动势
一、感应电动势分类 第一类:动生电动势:磁场恒定,导体或回路
运动 动
第二类:感生电动势:磁场随时间变化,导体
或回路静止 感
3
8-2 动生电动势和感生电动势
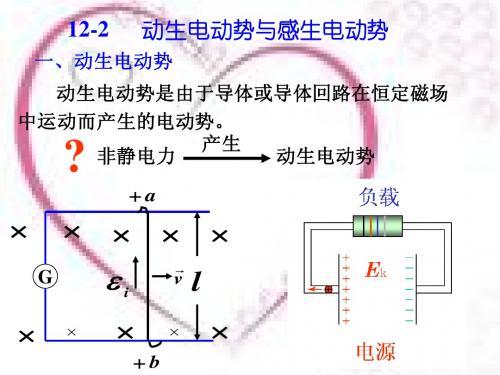
二、动生电动势(motional emf )
1、动生电动势 1)设回路正方向:顺时针
2)通过回路磁通量为: L
a
导体内电子受洛仑兹力为
F 非静电力 e v B
L
洛仑兹力克服静电场力,
B
i
f电
v
将电子从高电位移向低电
l F 非静电
位作功,使导体ab两端形 成电势差,产生电动势。
b
5
8-2 动生电动势和感生电动势
动生电动势的非静电场强为
E 非静电场
F 非静电力
v B
解:因为速度、磁场和棒 三个相互垂直,所以动生 电动势为
B P+
E非静电场dl
i
υ
O-
动
vBdl vB dl vBL
L
L
电动势方向:O
→P,沿
E 非静电场
v
B
方向
9
8-2 动生电动势和感生电动势
例2.在均匀磁场B中,长为L铜棒OP绕端点O以角速
度w垂直磁场逆时针转动。求棒上的动生电动势。
m Blx 0
3)动生电动势为:
a
B
i
f电
v
l F 非静电
i
dm
dt
Bl d x dt
Blv
负号表明:动生电动势方向是反时针
b
a
i
b
4
8-2 动生电动势和感生电动势
导线ab是电源,动生电动势的非静电力?
2、动生电动势的非静电力
动生电动势的非静电力是洛仑兹力!
w
每条杆为电源,圆盘等效N个电
源并联。圆盘的动生电动势为
圆盘
杆
1 wBR 2
2
O
电动势方向:圆盘边缘指向圆心 w
B
B
14
8-2 动生电动势和感生电动势
例5. 一导线矩形框的平面与磁感强度为 B的均匀磁场相 垂直。在此矩形框上,有一质量为 m长为 l 的可移动的细
导速体度棒v0运; 矩动形。框求还棒接的有速一率个随电时阻间变R 化。的开关始系时。,导体棒以
L
wlBdl
wB
L ldl 1 wBL2
0
0
0
2
电动势方向:O
→P,沿
E
非静电场
v B
方向。
P端为负极,O端为正极。 11
8-2 动生电动势和感生电动势
例3.一无限长载流I的直线 旁边有一个直导线AB,AB 以速度v平行于载流直线运 动。求AB的动生电动势。
解:长直载流线产生的磁 场为:
B 0I 2r
I1 r
O
A
a
v
B
dr B
L
因为速度、磁场和棒三个相互垂直,所以动生 电动势为
12
8-2 动生电动势和感生电动势
B
vBdl
aL
v
0I
dr
A
a 2r
0Iv ln a L
I1
v
E非静电场 v B
B
2
a
O A r dr B
电动势的方向: B → A, 沿
a
L
E非静电场 v B
方向。A端是正极,
B端为负极。
13
8-2 动生电动势和感生电动势
例4. R半径为、厚为h的圆盘在磁场以角速度w 逆时 针转动。求圆盘的动生电动势。
解:圆盘分成N条杆,每 条杆上的动生电动势都为
h R
杆
1 wBR 2
2
方向:指向圆心
解: 棒的动生电动势为
i Blv
棒受安培力为 F IBl B2l 2v R
方向沿 ox轴负向
N
Rl
BI
F
v
M
o
x
15
8-2 动生电动势和感生电动势
棒的运动方程为
m dv F B2l 2v
dt
R
积分得
N
Rl
B
F
v
v dv t B2l 2 dt
8-2 动生电动势和感生电动势
电磁感应定律:
i
N
dΦm dt
Φm B d S B cosdS
S
S
产生感应电动势的条件:穿过闭合回路的磁通
量变化
1
8-2 动生电动势和感生电动势
法拉第发明的人类历史上第一台发电机---法拉第 圆盘发电机是一个在磁场中转动的导体圆盘。 问:法拉第圆盘发电机的原理是什么?
2)速度、磁场、导线L三个相互垂直,动生电
动势为
动
vBsin cosdl
L
L vBsin 2 cos0dl
LvBdl
xx x
xx x
L
xEx非静电场
x x
x
x v
x
xdl xB x
3)动生电动势方向的确定
动生电动势方向:
朝向非静电场方向
E非静电场 v B
w
p
L
v wl
υ
o
E非静电场 v B
B
10
8-2 动生电动势和感生电动势
解:
在距O点l 处取线元dl。
因为速度、磁场和棒三个相互垂直,所以动生
电动势为
v wl
L
vBdl
,由右手定则确定。
7
8-2 动生电动势和感生电动势
求解动生电动势的方法:
1、确定载流导线的磁场大小和方向;B
2、求导线中的动生电动势;动 LvBdl
3、由
E非静电场 v B
确定动生电动势方向。
8
8-2 动生电动势和感生电动势
4、举例
例1. 在均匀磁场 B 中,
长为L杆以速度运动。求 棒的动生电动势。
v v0
0 mR
M
o
x
计算得棒的速率随时间变化的函数关系为
v
v e(B2l2 0
mR ) t
16
8-2 动生电动势和感生电动势
三、感生电动势
1、闭合回路中感生电动势为
感
感
dΦm dt
B(t)
L
闭合回路L是电源,产生感生电动势的非静电力?
2、 感生电场
麦克斯韦提出:时间变化磁场产生非静电性的
电场
E 感生电场
,称为感生电场(涡旋电场)。
感生电动势的非静电场是感生电场!即:
17
8-2 动生电动势和感生电动势
感
dΦm dt
E非静电场 d l
电源内部L
E感生电场 d l
电源内部L
因为
感
d Φm dt
d dt
Bd S