触摸屏的校准方法
电阻式触摸屏校准算法分析
电阻式触摸屏校准算法分析<一> 算法分析电阻式触摸屏在X,Y坐标方向上是线性的,比如S32采用的触摸屏,理论上Xmin=0,Xmax=1023,Ymin=0,Ymax=1023。
但是实际的触摸屏,往往是xmin>0,xmax<1023,ymin>0,ymax<1023。
所以就需要校准。
此文讨论的校准算法,其原理就是利用触摸屏的线性特性,针对被校准的触摸屏,获取其真正的x,y的范围,即xmin,ymin,xmax,ymax将其记录下来。
以后当触摸事件发生,将触摸屏报告的原始坐标(x,y)按比例投射到0~1023的坐标上即可。
注意,TP与LCD在相同的坐标方向上,具有相似性,即比例一致性。
看看对原始坐标的处理:If (x<xmin) x=0;Else if (x>xmax) x=xmax-xmin;Else x=1023*(x-xmin)/(xmax-xmin);If (y<ymin) y=0;Else if (y>ymax) y=ymax-ymin;Else y=1023*(y-ymin)/(ymax-ymin);可见,对原始坐标,先减去一个0位置的偏移量(x-xmin),然后求得它X范围上的比率((x-xmin)/(xmax-xmin)),再乘以1023,就得到了投射到(0~1023)上的坐标。
再看看校准算法。
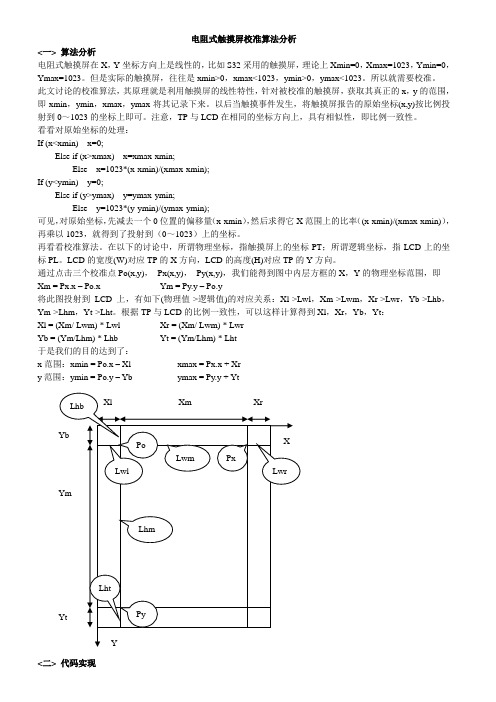
在以下的讨论中,所谓物理坐标,指触摸屏上的坐标PT;所谓逻辑坐标,指LCD上的坐标PL。
LCD的宽度(W)对应TP的X方向,LCD的高度(H)对应TP的Y方向。
通过点击三个校准点Po(x,y),Px(x,y),Py(x,y),我们能得到图中内层方框的X,Y的物理坐标范围,即Xm = Px.x – Po.x Ym = Py.y – Po.y将此图投射到LCD上,有如下(物理值->逻辑值)的对应关系:Xl->Lwl,Xm->Lwm,Xr->Lwr,Yb->Lhb,Ym->Lhm,Yt->Lht。
屏幕4点校准算法

屏幕4点校准算法介绍屏幕4点校准算法是一种用于校准触摸屏幕的方法。
通过测量用户点击屏幕时的坐标,并与屏幕上实际显示的坐标进行比较,可以计算出触摸屏幕的误差,并进行校准,从而提高触摸屏幕的准确性和灵敏度。
本文将详细介绍屏幕4点校准算法的原理、步骤和应用。
原理屏幕4点校准算法的原理基于触摸屏幕在不同位置的响应误差是不一样的。
通常情况下,由于制造过程中的一些偏差和材料差异,触摸屏幕在边缘和角落的响应误差较大,而在中心位置的响应误差较小。
因此,通过在触摸屏幕的四个角落进行校准,可以得到一个精确的校准参数,从而减小触摸屏幕的误差。
步骤屏幕4点校准算法的步骤如下:步骤1:选择参考点首先,需要选择四个参考点,一般选取屏幕的四个角落。
这四个参考点的坐标需要事先确定,并且要尽可能分布在屏幕的不同位置。
步骤2:用户操作用户需要按照指示在屏幕上分别点击四个参考点位置。
系统会记录下用户点击时的坐标。
步骤3:计算校准参数根据用户点击时的坐标和事先确定的参考点坐标,可以计算出校准参数。
校准参数可以通过线性插值或者其他数学模型得到,具体的计算方法要根据具体情况而定。
步骤4:应用校准参数最后,将计算出的校准参数应用到触摸屏幕上,以校正触摸屏幕的误差。
校准参数可以通过软件或者硬件的方式进行应用。
应用屏幕4点校准算法广泛应用于各类触摸屏设备,例如智能手机、平板电脑、工控机等。
通过校准触摸屏幕,可以提高用户的触控体验,减少误操作,并且可以精确地控制光标的位置。
总结屏幕4点校准算法是一种用于校准触摸屏幕的方法,通过选择参考点、用户操作、计算校准参数和应用校准参数等步骤,可以提高触摸屏幕的准确性和灵敏度。
该算法广泛应用于各类触摸屏设备,可以改善用户的触摸体验。
触摸屏校正方法
用久了出现在触摸不准不灵敏的时候的校正方法:
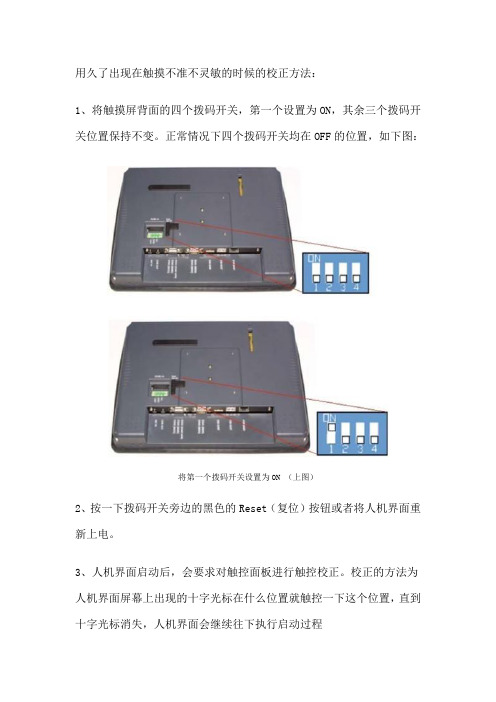
1、将触摸屏背面的四个拨码开关,第一个设置为ON,其余三个拨码开关位置保持不变。
正常情况下四个拨码开关均在OFF的位置,如下图:
将第一个拨码开关设置为ON (上图)
2、按一下拨码开关旁边的黑色的Reset(复位)按钮或者将人机界面重新上电。
3、人机界面启动后,会要求对触控面板进行触控校正。
校正的方法为人机界面屏幕上出现的十字光标在什么位置就触控一下这个位置,直到十字光标消失,人机界面会继续往下执行启动过程
4、校正完之后,会弹出如下对话框,询问是否要恢复为出厂设置密码如下图,请选择NO 校正完成。
记得把第一个将第一个拨码开关设置回OFF
TK6070需要把J3端子的1-2短接就行,校准完成后在恢复到7-8短接。
电容屏触摸校准方法
电容屏触摸校准方法
电容屏触摸校准是确保触摸屏准确响应用户输入的重要步骤。
以下是电容屏触摸校准的一般方法:
1. 手动校准,在某些设备上,可以通过进入设置菜单中的触摸屏校准选项来手动进行校准。
在这种情况下,系统会显示一些目标点,用户需要按照指示用手指精确地点击这些点,以便系统能够准确地识别屏幕的触摸位置。
2. 自动校准,许多设备在启动时会自动进行触摸屏校准,系统会通过内置的算法自动识别触摸屏的特征并进行校准。
这种方法通常更简单,用户无需进行手动操作。
3. 使用校准工具,一些设备可能配备了专门的校准工具,用户可以通过这些工具进行更精细的触摸屏校准,以确保触摸屏在不同位置都能准确响应。
4. 软件校准,在一些情况下,触摸屏校准可以通过安装特定的校准软件来实现,这些软件通常提供了更多的参数和选项,用户可以根据自己的需求进行定制化的校准。
无论采用哪种方法,触摸屏校准都是非常重要的,它可以确保设备在日常使用中能够准确响应用户的操作,提高了用户体验。
在进行触摸屏校准时,用户需要确保环境安静,避免干扰,以获得最佳的校准效果。
同时,定期进行触摸屏校准也是一个好习惯,可以确保设备长期保持良好的触摸性能。
触摸屏校准方法
嵌入式Linux和MiniGUI结合的解决方案已经成为很多嵌入式系统的图形化方案之一,而触摸屏也是很多嵌入式系统首选的输入设备,因此触摸屏的校准也成为很多嵌入式系统开发过程中常常碰到的问题之一。
嵌入式Linux是一种可以进行裁减、修改使之能在嵌入式计算机系统上运行的操作系统,既继承了Internet上的无限的开放源代码资源,又具有嵌入式操作系统的特性。
该系统具有较高的稳定性和安全性、良好的硬件支持、标准兼容性和资源丰富等功能。
而触摸屏是一种方便、快捷的输入设备,附着在显示器的表面,与显示器配合使用,在工业控制场合得到了广泛的应用。
然而在实际的嵌入式程序移植的过程中,由于触摸屏尺寸的不同,以及GUI(Graphic User Interface)方案选择和IAL(Input Abstract Layer)的差异,一般开发板制造商并不提供触摸屏的校正程序。
本文介绍的正是笔者在制作实际的嵌入式Linux数控机床人机接口过程中,提出的一套基于嵌入式Linux和MiniGUI的通用触摸屏校准程序设计方案。
MiniGUI简介MiniGUI()是国内最有影响的自由软件项目之一, MiniGUI 项目的目标是为基于 Linux 的实时嵌入式系统提供一个轻量级的图形用户界面支持系统。
该项目自1998年底开始到现在,已历经7年多的开发过程,到目前为止,已经比较成熟和稳定,并且在许多实际产品或项目中得到了广泛应用。
MiniGUI 为应用程序定义了一组轻量级的窗口和图形设备接口。
利用这些接口,每个应用程序可以建立多个窗口,而且可以在这些窗口中绘制图形且互不影响。
用户也可以利用MiniGUI 建立菜单、按钮、列表框等常见的 GUI 元素。
MiniGUI 可以具有两种截然不同的运行时模式:MiniGUI-Threads或者MiniGUILite。
运行在 MiniGUI-Threads 上的程序可以在不同的线程中建立多个窗口,但所有的窗口在一个进程中运行。
触摸屏校准方法!!!

触摸屏及ADS7846/HT20462009-05-15 10:17四线电阻式触摸屏,上图我们看到,触摸屏一般是上线和下线为一组。
左右线为一组,用万用表可以量到阻值。
上下的线阻为(Y+ Y-)阻值为 500欧----680欧。
左右线阻(X+ X-)阻值为 350欧----450欧。
jz4740,的中断计算程序#define SPCS_HIGH v_pSSIGPIORegs->group[SPI_EN_PIN/32].DATS = 1 <<(SPI_EN_PIN%32)#define SPCS_LOW v_pSSIGPIORegs->group[SPI_EN_PIN/32].DATC = 1 << (SPI_EN_PIN%32)#define SPCK_HIGH v_pSSIGPIORegs->group[SPI_CLK_PIN/32].DATS = 1 <<(SPI_CLK_PIN%32)#define SPCK_LOW v_pSSIGPIORegs->group[SPI_CLK_PIN/32].DATC = 1 <<(SPI_CLK_PIN%32)#define SPDA_HIGH v_pSSIGPIORegs->group[SPI_DATA_PIN/32].DATS = 1 <<(SPI_DATA_PIN%32)#define SPDA_LOW v_pSSIGPIORegs->group[SPI_DATA_PIN/32].DATC = 1 <<(SPI_DATA_PIN%32)#define SPDAIN v_pSSIGPIORegs->group[SPI_DATARX_PIN/32].PIN & (1 <<(SPI_DATARX_PIN % 32))//insert 0 ,not insert 1;#define SPDABUSY v_pSSIGPIORegs->group[SPI_BUSY_PIN/32].PIN & (1 <<(SPI_BUSY_PIN % 32))//insert 0 ,not insert 1;//------------------------------------------------------------------------------ void delay(int k){int i;for(i=0;i<k;i++);}void start()//SPI开始{SPCK_LOW;SPCS_HIGH;SPDA_HIGH;SPCK_HIGH;SPCS_LOW;}void WriteCharTo7843(unsigned char num) //SPI写数据{unsigned char count=0;SPCK_LOW;for(count=0;count<8;count++){if ( (num & 0x80) == 0x80)SPDA_HIGH;elseSPDA_LOW;SPCK_LOW;delay(3);SPCK_HIGH;delay(3);num <<= 1;}}int ReadFromCharFrom7843() //SPI 读数据{unsigned char count=0;WORD Num=0;for(count=0;count<12;count++){Num<<=1;SPCK_HIGH;delay(3); //下降沿有效SPCK_LOW;delay(3);if(SPDAIN)Num++;}return(Num);}INT WINAPI SpiISR( VOID ){while ( !g_SpiISR.bISTExist ){int X=0,Y=0,X_,y_;WaitForSingleObject( g_SpiISR.hIntrEvent, INFINITE );Sleep(30);//中断后延时以消除抖动,使得采样数据更准确start(); //启动SPIWriteCharTo7843(0x90); //送控制字 10010000 即用差分方式读X坐标详细请见有关资料delay(2);while(SPDABUSY);SPCK_HIGH; delay(4);SPCK_LOW; delay(4);X=ReadFromCharFrom7843();WriteCharTo7843(0xD0); //送控制字 11010000 即用差分方式读Y坐标详细请见有关资料delay(2);while(SPDABUSY);SPCK_HIGH; delay(4);SPCK_LOW; delay(4);Y=ReadFromCharFrom7843();SPCS_HIGH;RETAILMSG(1, (TEXT("SpiISR X=%d,Y=%d\r\n"),X,Y));InterruptDone( g_SpiISR.dwSwIntr );}return ( 0 );}控制字ADS7846的控制字由表1所列,其中S为数据传输起始标志位,该位必为“1”,A2~A0进行通道选择。
光洋触摸屏校准方法

光洋触摸屏校准方法
嘿,朋友们!今天咱就来唠唠光洋触摸屏校准这档子事儿。
你想想看啊,这触摸屏就好比是我们和机器沟通的一个小窗口,要
是这个窗口歪了斜了,那咱和机器的交流不就乱套啦!所以校准它可
太重要啦!
那怎么校准呢?别急,听我慢慢道来。
首先呢,咱得找到校准的入口,就像你找家门钥匙孔一样,得找对地方才行。
一般在系统设置里
能找到相关的选项,你就可着劲儿地找吧!
然后呢,进入校准模式,这时候屏幕上可能会出现一些小点点或者
线条啥的,嘿,这就是让你瞄准的目标呢!就好像打靶一样,你得把
你的手指准确地按在那些点上。
这时候你可别马虎呀,得集中注意力,一个点一个点地认真去校准。
要是你马马虎虎的,那校准出来的效果能好吗?那肯定不行呀!
哎呀,你说这触摸屏校准不就跟咱平时走路一样嘛,得一步一步走
稳了,才能走得顺溜。
要是东倒西歪的,那不就摔跟头啦!
校准的过程中,你可能会觉得有点繁琐,但是没办法呀,谁让咱要
让这触摸屏乖乖听话呢!你就耐心点,就当是和它培养感情啦!
等你把所有的点都校准好了,嘿,那感觉,就好像你给这触摸屏整
了个容一样,焕然一新呀!
这时候你再去试试操作,哇塞,那叫一个顺手,就跟你使唤自己的胳膊腿儿一样自然。
所以说呀,朋友们,可别小瞧了这光洋触摸屏校准,它可是能让你的使用体验大大提升呢!别嫌麻烦,认真去做,你肯定会有收获的。
好好对待你的触摸屏,它也会好好为你服务的哟!这不就是咱和机器和谐共处的小秘密嘛!你说是不是呀?。
有效处理手机触摸屏失灵的情况
有效处理手机触摸屏失灵的情况手机触摸屏失灵是我们在日常使用手机时经常遇到的问题之一。
当我们的手机触摸屏出现失灵时,可能会给我们的生活和工作带来不便。
因此,有效处理手机触摸屏失灵的情况是非常重要的。
本文将介绍一些常见的手机触摸屏失灵原因以及相应的解决方法,帮助读者更好地应对这一问题。
一、常见手机触摸屏失灵原因1.触摸屏脏污触摸屏使用时间长了,表面容易积聚灰尘、污垢等杂质,导致触摸屏失灵。
此时,我们可以使用干净柔软的布轻轻擦拭触摸屏表面,清除污垢,恢复触摸屏的灵敏度。
2.触摸屏受潮手机触摸屏进水或者受潮后,容易导致触摸屏失灵。
在这种情况下,我们应该立即将手机关机,并将手机放入干燥通风的地方晾干。
切记不要用电吹风或者暴晒阳光直接照射手机,以免损坏手机内部元件。
3.触摸屏硬件故障有时候,手机触摸屏失灵是由于硬件故障引起的。
这时候,我们可以尝试重启手机,看是否能够解决问题。
如果重启后触摸屏仍然无法正常使用,建议及时联系手机售后维修服务中心进行检修。
二、有效处理手机触摸屏失灵的方法1.软件问题处理有时候,手机触摸屏失灵是由于软件问题引起的。
我们可以尝试通过以下方法解决:(1)清理手机缓存:打开手机设置,找到应用管理,选择清理缓存,清理手机缓存可以帮助提高手机的运行速度,并有助于解决触摸屏失灵问题。
(2)更新系统:有时候,手机触摸屏失灵是由于系统版本过旧引起的。
我们可以打开手机设置,选择系统更新,更新手机系统到最新版本,以修复触摸屏失灵问题。
2.触摸屏校准有时候,手机触摸屏失灵是由于校准问题引起的。
我们可以尝试通过以下方法进行校准:(1)打开手机设置,选择显示设置,找到触摸屏校准选项,按照屏幕上的指示进行校准操作。
(2)如果手机没有触摸屏校准选项,我们可以尝试在应用商店中搜索并下载触摸屏校准软件,按照软件的指引进行校准操作。
3.专业维修服务如果以上方法都无法解决手机触摸屏失灵问题,建议及时联系手机售后维修服务中心进行专业维修。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本文介绍的校准方法需要三个目标点/或测试点,然后依次进行触摸测试,以确定该显示屏特有的校准因数。
最后通过这些校准因数将触摸屏的对应点与实际显示的对应点完全对应起来。
误差的来源
有几个误差源会影响触摸屏控制器,使之无法产生正确的对应点X和Y坐标。
最主要的误差源是电气噪声、机械误差及放大因子。
此外,操作者的误操作也会有所影响,如手指或铁笔按压时间不够长或压力不够大。
以上所有误差均会产生无用数据,必须对它进行纠正补偿才能使触摸屏正常工作。
在各种电气系统中,由热效应或电磁效应以及系统设计缺陷引起的电气噪声无处不在。
在触摸屏中,由于AD转换器的前端电路具有高输入阻抗,因此特别容易受到电气噪声的影响。
除了对带有触摸屏控制器的电路小心布局外,我们通常在AD转换器输入端增加低通滤波器来解决这一问题。
此外也可选择软件方法,舍弃AD转换中的最小的一、两位,并用算法将一些落在允许误差范围之外的数据点从采样流中去除。
这种软件算法也可消除由使用者产生的误差。
本文所阐述的校准方法可用来解决由于机械误差和放大因素引起的误差。
图3中的圆圈表示触摸屏下的LCD显示的图形,椭圆则表示当用户顺着LCD显示的图像画圈时,触摸屏对应点的集合,不过有所夸大。
这个重建的图形显然经过一系列旋转、移位和放大,而且在每个方向变换的参数不一样。
校准的重点则是将触摸屏上显示的这个重建图形经过变换,换算出与LCD显示的图形相一致的对应点集合。
校准的数学基础
为了得到一个通用解决方案,我们将每个点描述为一个数学参量。
如图4所示,可将LCD显示器上的每个点当作一个矢量PD,而该点在触摸屏上对应的点则当作矢量P。
此外,我们假设一个参量M,通过这个参量可将PD与P进行换算,即
PD=MP(1)这里的M是一个转换矩阵,也是我们要研究的对象。
如果能得到转换矩阵M中相关的数值,那么给定触摸屏上任一点P,我们就可换算出它在LCD显示器上的对应点PD。
现在假设LCD显示器上的任一点都与触摸屏上的某点相对应,但要经过旋转、移位和放大处理。
如果按矢量的长度和角度将每个点用(X,Y)两个坐标来表示,则LCD显示器和触摸屏上的点都可通过以下方程式来表达:
如果触摸屏在校准时与显示屏之间存在一个角度差异,为了进行补偿,要进行旋转处理,即θr=θD-θ,θr 是角度差。
这样我们便可得到一个中间点:
将每个点的X坐标和Y坐标以不同的因子放大,得到KX和KY。
考虑放大因子可以得到以下方程式,它更准确地描述了LCD显示器与触摸屏上点与点之间的对应关系:
最后,我们加上位移因子XT和YT,得到LCD显示器与触摸屏上点与点之间的对应方程式:
为了将方程式5再次变换以求取方程式中的未知量,假设触摸屏和LCD显示器上点与点之间有一个角度差θr,但这一角度极小,因此sinθr≈θr,而cosθr≈1.0。
根据这一假设我们得出另两个十分有用的近似方程式:
通过以下组合,方程式5可重新表示为:
方程式7的优点在于,它采用触摸屏坐标描述了LCD显示器上的点坐标。
上述方程式也可转换为:
利用我们原先的假设(即实际情况中的放大、旋转和位移因数均为常量),除X和Y之外,上述方程式右边的各项均为常量。
通过采用更方便的方式表达XD和YD坐标,我们可以得到触摸屏与LCD显示器各点之间的对应关系方程式:
可见,只有当触摸屏和LCD显示器间的角度差非常小时,才可运用上述公式。
校准矩阵
一般的校准算法常选取2-5个采样点来收集校准信息。
假设LCD显示器上的对应点可以通过触摸屏上的点转换得到,只需正好3个采样点我们就可得到校准数据。
需要3个采样点的原因在于方程式9a和9b有三个未知量。
从这3个采样点我们可获得足够的信息来建立并求解这一联立方程组。
采样点的选取也应当考虑到实际情况。
它们必须能得出非冗余的联立方程组,它们不能太靠近触摸屏的边缘(此处呈现非线性),此外它们的间隔必须足够宽,以便尽可能减少放大误差。
图5所示的P0、P1和P2这三个点符合这些条件。
这些点距触摸屏边缘约10%,分布足够散,得出以下非冗余方程式:
从而求出A、B、C、D、E和F的值。
一旦这些参数值定下来,便可利用方程式9,通过触摸屏上的原始数据计算出它在LCD显示器上的对应点。
上述联立方程组的未知量已求解出,此处不再推导。
直接跳过中间步骤得出最后结论,将K作为各方程式的公分母,便可得出未知量:
软件实现
实际的软件实现过程相对简单。
可从/code.htm上得到程序样本,它包括三个文件:alibrate.c、calibrate.h和sample.c。
第一个文件包含两个函数setCalibrationMatrix()和getDisplayPoint()。
前者实现了方程式13-18,后者则实现了方程式9。
D,而该点在触摸屏上对应的点则当作矢量P。
"hspace=12
src="/Article/UploadFiles/200504/20050420001204188.GIF"align=right vspace=12>启动文件包含了各种声明,另一个源文件则实现了一个控制台应用程序,这一程序执行校准功能,并示范如何在器件中使用这些函数。
sample.c中的代码假设在调用这些函数前,器件中实现了一个执行程序来采集校准数据。
表1是建议的校准步骤,将这些步骤执行完毕就实现了校准过程,此时设备便可开始从触摸屏系统接收精确的位置信息。
触摸屏控制器中设有中断程序,当程序将数字转换器的输出数据过滤后,它需要调用函数getDisplay-Point()。
通常,getDisplay-Point()函数调用是将触摸屏某点数据存入用户输入队列以前的最后一个步骤。
表1:建议的校准步骤。
=======================================
1.用全组数值调用setCalibrationMatrix()以设置显示屏驱动器,并提供原始存取数据(见sample.c)。
这样就不需要为存取数据构造特殊的函数。
你只需要按照与程序一样的机制获取纵坐标。
2.在坐标(XD0,YD0)画出第一个目标。
3.收集从触摸屏返回的数据,并存储在坐标(X0,Y0)。
4.在坐标(XD1,YD1)画出第二个目标。
5.收集从触摸屏返回的数据,并存储在坐标(X1,Y1)。
6.在坐标(XD2,YD2)画出第三个目标。
7.收集从触摸屏返回的数据,并存储在坐标(X2,Y2)。
8.采用参考显示数据和其产生的触摸屏数据作为变量,调用setCalibrationMatrix()函数。
=================================
其它考虑因素
执行采样函数是为了保证每次都获得准确结果,因而它的中间值未经过放大。
由于多数数字转换器提供的原始数据为10位,因此需要进行整数型32位数学运算,方程式15和18会产生31位的符号数。
执行这些方程式时要使用分辨率高达1,024点的触摸屏数字转换器,它适用于分辨率高达512点(宽度或高度)的显示器。
如果要在大面积的触摸屏中使用这些公式,就必须使用64位整数或将缩小输出值和中间结果,以免在计算校准因子时寄存器出现溢出。
函数getDisplayPoint()与校准矩阵有关,后者包括一套有效参量,这种采样结构使用自动变量来表明LCD 显示器和触摸屏的对应点间以及校准矩阵间的关系,不过在实际执行中,校准矩阵最好是一个全局结构,并在启动时正确初始化。
这些代码可从/code.htm免费下载,并用于多种场合。
不过该代码未经过任何优化处理。
本文小节
本文描述的触摸屏校准方法简单、灵活并可纠正一些常见的机械性误差。
这些误差(位移、放大、旋转)都是由于LCD显示器与触摸屏之间的不对应引起的。
尽管可通过机械方法来弥补,但是软件方法无需使用机械设备,且更能保证产品质量。
本文来自:USB中国开发论坛()详细出处参考:
/thread-18681-1-19.html。