月球探测车转向系统动力学建模与分析
月球车设计报告

四、月球车仿真运动分析 .......................................... 17
4.1 模拟路况的建立 ....................................................................................................... 17
(10) 进行动力学仿真,获取各电机转矩的变化规律; (11) 将月球车行走系统仿真运动过程生成视频文件; (12) 整理设计资料,编写设计报告。
1.2 提交要求
(1) 纸质文档——①设计报告 1 份(A4 纸打印,装订成册);② 装配图纸 1
5 / 25
设计原理与方法 2—月球车行走系统设计与分析
3.3.1 月球车驱动电机选择 ..................................................................................... 9 3.3.2 月球车前进轮设计 .......................................................................................... 9 3.4 月球车差速器设计 ................................................................................................... 12 3.4.1 差速器的悬挂系统 ........................................................................................ 12 3.4.2 差速器的自由度 ............................................................................................ 12 3.4.3 差速器的运动分析 ........................................................................................ 13 3.4.4 差速器输入轴的设计 ................................................................................... 13 3.5 月球车总体设计 ...................................................................................................... 14 3.5.1 月球车三维模型图:....................................................................................... 15
六轮月球探测车运动学建模与分析

六轮月球探测车运动学建模与分析
王佐伟;梁斌;吴宏鑫
【期刊名称】《宇航学报》
【年(卷),期】2003(024)005
【摘要】从运动特性上看,六轮月球探测车是复杂的多路闭链系统.完整的六轮月球探测车运动学模型应考虑所有车轮与地面的相互运动关系以及滑移的影响.现对滑移条件下的六轮月球探测车进行了运动学建模与分析.根据六轮摇臂式月球探测车的结构特点,以闭链坐标变换和瞬时重合坐标法为基本工具,详细推导了六轮探测车的正、逆运动学模型,分析了相关的运动学特性.所建立的运动学方程直接基于任意三维地形环境.在运动学建模与分析中,将车轮的各项滑移全部单独提取出来考虑,给出了滑移量的估算方法,提出了利用滑移估算值对闭环运动控制进行修正的方法.该研究结果为六轮月球探测车的结构分析与运动控制提供了有力的基础.
【总页数】7页(P456-462)
【作者】王佐伟;梁斌;吴宏鑫
【作者单位】中国空间技术研究院北京控制工程研究所,北京,100080;中国空间技术研究院北京控制工程研究所,北京,100080;中国空间技术研究院北京控制工程研究所,北京,100080
【正文语种】中文
【中图分类】TP24
【相关文献】
1.基于摇臂-转向架结构月球探测车的越障能力分析 [J], 李海滨;段志信;康补晓
2.六轮月球探测车运动学建模与分析 [J], 王佐伟;梁斌;吴宏鑫
3.月球探测车的运动学建模 [J], 邓宗全;胡明;高海波;王少纯
4.可变直径轮月球探测车运动学建模与分析 [J], 崔莹;高峰
5.可变直径轮月球探测车及其越障能力分析 [J], 孙刚;高峰;孙鹏
因版权原因,仅展示原文概要,查看原文内容请购买。
双月旁转向轨道的动力学与建模研究
t jc r ei f‘ utMi inadMutP roe .F s.t L ri r dvddit toc se a e l e r et yd s no M l— s o n l—ups ’ i t h D Sob sae i e o w l ssnm dPa a o g i s i r e t i n a n
o l e t e D S t jc r ae dsu sd i o c tgr s o p l a o ,a d t r c l a d slt n me o s o f a p E r e t r i se n t a oi fa pi t n n h pi i e n o i t d f P n y a o y c w e e ci e n p uo h B c fp t eobt sa o smm r e ea .T i s d n u vy a o t E r etr scud po iean w is h ak i y r i i l u ai d i d ti hs t ya d sre b u D t jc i o l rv e i t l p s z n l u S a oe d ng
D :1. 83 ji n 10 —3 8 2 1 .0 0 1 oI 0 3 7/.s .00 12 .0 2 1 .0 s
八轮星球探测车移动系统的设计与分析

[4]邓宗全,胡 明,高海波,等. 月球探测车关键技术及其原理样机的研制.2002年深空探测技术与应用科学国际研讨会. 青岛,2002:29-35
计划进度:
起止时间
内容
2012.11.15~2012.12.10
调研、信息汇总,文献查阅分析
[10]付宜利,徐贺,王树国等. 沙地环境移动机器人驱动轮的发展概况综述.机器人技术与应用. 2004,4: 22-29
[11]刘明治,高桂芳.空间可展开天线结构研究进展. 宇航学报. 2003, 24(1):82-87
[12]岳建如.研究空间可动结构设计与控制分析.浙江大学博士学位论文.2002:2-6
[2]CHEN Baichao, WANG Rongben, YANG Lu, JIN Li-sheng, GUO Lie.Design and Simulation Research on a New Type of Suspension forLunar Rover.Proceedings of the 2007 IEEE International Symposium onComputational Intelligence in Robotics and Automation.2007:1-5
目标:
提出的设计方案可行,结构设计合理,完成的三维、二维图纸设计,并完
成八轮星球探测车运动学分析与仿真验证。
任务:
1.八轮星球探测车可展开移动系统方案结构设计
二级半转轮腿机构月球探测车及其移动性能分析
N2
= P1
=
G 4
(6)
M = F2 (L1 + L2 ) + N 2L3 式中 :μ———跨步杆与路面之间的摩擦因数 ;
G———在低重力环境下探测车所受重力 ; M ———传递到一级转臂主轴的力矩 。
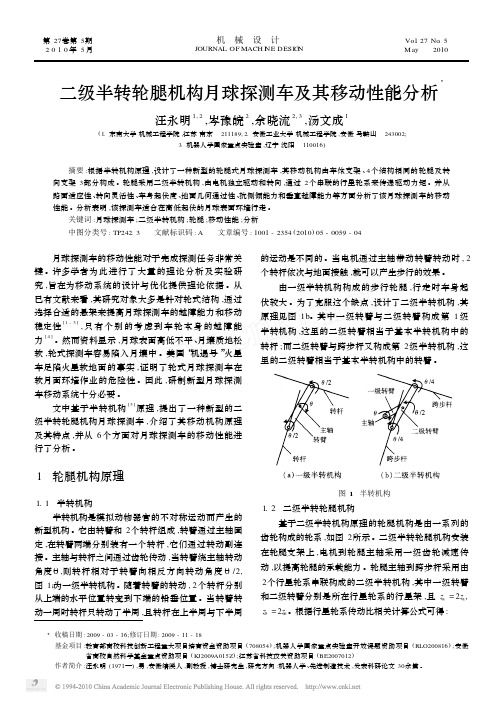
又根据图 3可得 :
M = z2 z1
= Ta
(7)
式中 : Ta ———电机的转矩 (驱动力矩 ) ;
垂直越障高度为 :
Hmax = 2L2 + L3
(9)
若取一级转臂长 L1 = 50 mm, 二级转臂长 2L2 =
2010年 5月
汪永明 ,等 :二级半转轮腿机构月球探测车及其移动性能分析
61
起伏。而文中设计的探测车 ,其轮腿与地面是不连续的 交替接触 ,它的“腿 ”可能跨过前方道路上的一些高低不 平 ,从而降低了因外界因素造成车身起伏的概率 。 3. 4 地面几何通过性
当月球探测车行驶时 ,会遇到岩石、火山坑等障碍 物 ,其地面几何通过性包括两方面 [6] : (1)月球探测车轮 廓与障碍物发生碰撞 ,包括月球探测车前端或尾部突出 部位碰到障碍 ,使月球探测车卡住而不能通过 ,称为触头 或托尾失效 ; (2)月球探测车底部碰到凸起障碍 ,使月球 探测车悬起而失去通过性 ,即所谓“托底失效 ”。
z1 , z2 ———齿轮 1和 2的齿数 。
62
机 械 设 计
第 27卷第 5期
求解式 ( 6) 和式 ( 7) ,则所需的驱动力矩需满足 :
Ta
≥
Gz1 4 z2
[μ(L1
+ L2 )
+L3 ]
(8)
当驱动力矩满足式 ( 8) , 且小于电机所允许的最
基于ADAMS的六轮月球车动力学建模与仿真
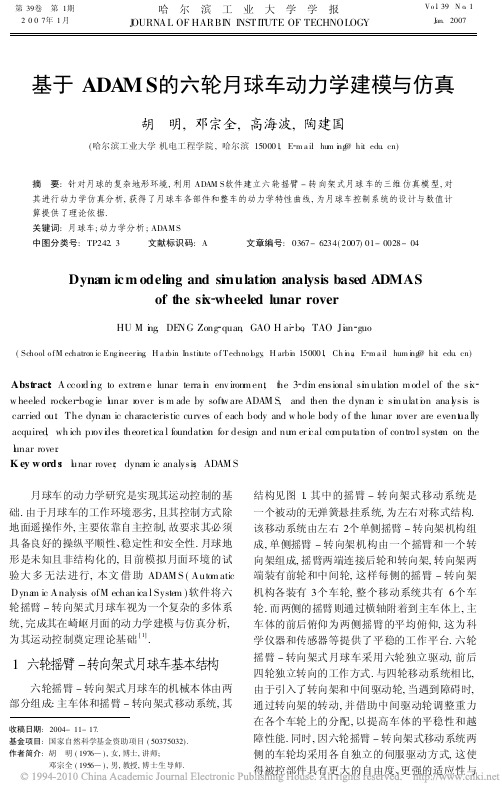
第39卷 第1期2007年1月哈 尔 滨 工 业 大 学 学 报J OURNAL OF HARBI N I NSTI TUTE OF TECHNOLOGYVo l 39N o 1J an.2007基于ADA M S 的六轮月球车动力学建模与仿真胡 明,邓宗全,高海波,陶建国(哈尔滨工业大学机电工程学院,哈尔滨150001,E m a i:l hu m i ng @hit .edu .cn)摘 要:针对月球的复杂地形环境,利用ADAM S 软件建立六轮摇臂-转向架式月球车的三维仿真模型,对其进行动力学仿真分析,获得了月球车各部件和整车的动力学特性曲线,为月球车控制系统的设计与数值计算提供了理论依据.关键词:月球车;动力学分析;ADAM S 中图分类号:TP242.3文献标识码:A文章编号:0367-6234(2007)01-0028-04Dyna m ic m odeli ng and si m ulation analysis based ADMASof the si x wheeled lunar roverHU M i n g ,DE NG Zong quan ,GAO H ai bo ,TAO Ji a n guo(School o fM echatron ic Eng i neer i ng ,H a rbin Instit ute o f T echno l ogy ,H arbi n 150001,Ch i na ,E m a i:l hum i ng @hit .edu .cn)Abst ract :A ccor d i n g to extre m e lunar terra i n env ironm en,t t h e 3 di m ensional si m ulation m odel of the si x w heeled rocker bog ie l u nar r over is m ade by soft w are ADAM S,and then the dyna m i c si m ulati o n ana l y sis iscarried ou.t The dyna m ic characteristic curves of each body and w ho le body o f the lunar r over are event u a lly acquired ,wh ich pr ov i d es theoretica l foundation for design and nu m er i c al co m puta ti o n of contro l syste m on the l u nar rover .K ey w ords :l u nar rover ;dyna m ic analysis ;ADAM S 收稿日期:2004-11-17.基金项目:国家自然科学基金资助项目(50375032).作者简介:胡 明(1976 ),女,博士,讲师;邓宗全(1956 ),男,教授,博士生导师.月球车的动力学研究是实现其运动控制的基础.由于月球车的工作环境恶劣,且其控制方式除地面遥操作外,主要依靠自主控制,故要求其必须具备良好的操纵平顺性、稳定性和安全性.月球地形是未知且非结构化的,目前模拟月面环境的试验大多无法进行,本文借助ADAM S (Auto m atic Dyna m ic Analysis ofM echan ica l Syste m )软件将六轮摇臂-转向架式月球车视为一个复杂的多体系统,完成其在崎岖月面的动力学建模与仿真分析,为其运动控制奠定理论基础[1].1 六轮摇臂-转向架式月球车基本结构六轮摇臂-转向架式月球车的机械本体由两部分组成:主车体和摇臂-转向架式移动系统,其结构见图1.其中的摇臂-转向架式移动系统是一个被动的无弹簧悬挂系统,为左右对称式结构.该移动系统由左右2个单侧摇臂-转向架机构组成,单侧摇臂-转向架机构由一个摇臂和一个转向架组成,摇臂两端连接后轮和转向架,转向架两端装有前轮和中间轮,这样每侧的摇臂-转向架机构各装有3个车轮,整个移动系统共有6个车轮.而两侧的摇臂则通过横轴附着到主车体上,主车体的前后俯仰为两侧摇臂的平均俯仰,这为科学仪器和传感器等提供了平稳的工作平台.六轮摇臂-转向架式月球车采用六轮独立驱动,前后四轮独立转向的工作方式.与四轮移动系统相比,由于引入了转向架和中间驱动轮,当遇到障碍时,通过转向架的转动,并借助中间驱动轮调整重力在各个车轮上的分配,以提高车体的平稳性和越障性能.同时,因六轮摇臂-转向架式移动系统两侧的车轮均采用各自独立的伺服驱动方式,这使得被控部件具有更大的自由度、更强的适应性与机动性.1 右后轮;2 右中轮;3 右前轮;4 右转向;5 右摇臂;6 左前轮;7 左转向架;8 左中轮;9 左摇臂;10 横轴;11 左后轮图1 摇臂-转向架式月球车机构原理图2 基于ADAM S 的月球车三维建模利用ADAM S 2003[2]软件建立六轮摇臂-转向架式月球车的三维仿真分析模型,参数如下:月球车原理样车的质量为50kg (空载);外形尺寸为860mm 600mm 450mm;车轮直径为220mm ;车轮宽度为150mm.摇臂-转向架式月球车的仿真分析模型如图2所示.该模型的外形尺寸、各零部件的质量、电机转速和输出扭矩等均按原理样车的实际参数设定.同时,与车轮接触的月面图2 六轮摇臂-转向架式月球车仿真模型为软地面环境,即月球车在仿真月面运行过程中为刚性车轮与软地面相互作用.3 基于ADA MS 的月球车动力学仿真3 1 ADAM S 动力学仿真算法ADAM S 软件将多体动力学与大位移、非线性分析求解功能相结合,可高效率、高精度的进行动力学分析.六轮摇臂-转向架式月球车系统仿真模型建立与分析的基本步骤:原始输入参数的确定;动态分析模型的建立;仿真模型的分析与优化[3-4].ADAM S 软件的具体数据流程如图3所示.图3 A DAM S 数据流程图3 2 ADAM S 动力学仿真结果六轮摇臂-转向架式月球车的本体重50kg ,假定搭载20kg 的有效载荷,在模拟月面环境中进行ADAM S 仿真(仿真时间20s),如图4所示.图4 六轮摇臂-转向架式月球车动力学仿真环境六轮摇臂-转向架式月球车在崎岖月面的各部件动力学解曲线如图5所示.!29!第1期胡明,等:基于ADAM S 的六轮月球车动力学建模与仿真!30!哈 尔 滨 工 业 大 学 学 报 第39卷图5 六轮摇臂-转向架式月球车动力学特性曲线图5(a)、图5(b)为主车体B的位移、速度、加速度曲线及其角速度、角加速度曲线,表示在外载荷作用下,月球车行驶在三维崎岖地形且不受任何控制时,主车体的位姿变化.因六轮摇臂-转向架式月球车在几何结构上左右对称,运行过程中因适应三维崎岖地形而实时被动变形,故其移动系统各分离体的动力学特性曲线走势有所不同.但选取单侧摇臂-转向架式移动机构即可说明月球车移动系统的动力学性能,故这里给出左侧摇臂-转向架式移动机构的动力学解曲线.图5(c)~图5(f)为左侧摇臂、转向架各自质心的位移、速度、加速度曲线及其角速度、角加速度曲线,表示在外载荷作用下,月球车行驶在三维崎岖地形且不受任何控制时,摇臂-转向架式移动系统被动适应地形的特性.图5(g)~图5(l)为左前轮、左中轮与左后轮各自质心的位移、速度、加速度曲线及其角速度、角加速度曲线,表示在外载荷作用下,月球车行驶在三维崎岖地形且不受任何控制时,各独立驱动车轮位姿变化情况.由各车轮速度变化曲线可以看出:为使电机驱动效率最高,必须对各独立驱动车轮电机进行实时协调控制.图5(m)、图5(n)为月球车主车体动能、动量和相对质心的动量矩曲线,表示在外载荷作用下,月球车主车体的运动状态和特性.4 结 论利用动力学仿真软件ADAM S对六轮摇臂-转向架式月球车进行动力学建模和仿真分析,得到了月球车各部件的动力学参数曲线,包括主车体、左侧摇臂、转向架质心的位移、速度、加速度、角速度与角加速度曲线;左侧各车轮在模拟月面环境下的位移、速度、加速度、角速度与角加速度曲线;主车体的动能、动量与相对主车体质心的动量矩曲线,为设计具有强鲁棒性的月球车控制系统提供了理论依据.参考文献:[1]杨凯,黄亚楼,徐国华.带拖车的轮式移动机器人系统的建模与仿真研究[J].系统仿真学报,2000(1):43-46.[2]李军,邢俊文,覃文洁,等.A DAM S实例教程[M].北京:北京理工大学出版社,2002:1-2.[3]郑建荣.ADAM S-虚拟样机技术入门与提高[M].北京:机械工业出版社,2002:1-3.[4]HUANG M H,DAV I D E.Dyna m i c si m ulati on of acti vely-coordi nated whee l ed vehic l e syste m on uneven terra i n[C]//Proceed i ng s of t he1999IEEE Inte rna ti ona l Conference on R obotics and A utom ati on.D etro ir:IEEE R o botics and Autom ati on Soc i e ty,1999:202-211.(编辑 赵丽莹)!31!第1期胡明,等:基于ADAM S的六轮月球车动力学建模与仿真。
主动摆臂四轮菱形月球车移动系统动力学建模与移动性能研究的开题报告
主动摆臂四轮菱形月球车移动系统动力学建模与移动性能研究的开题报告一、选题背景和研究意义月球车是探测月球的不可或缺的设备,其移动性能直接影响到任务的完成效率。
目前已有多种不同类型的月球车,其中四轮菱形月球车常常被应用在月球探测任务中。
该类型月球车具有结构简单、机动性能好、操纵简便等优点,但其自身的移动性能研究尚不充分。
因此,本文拟对四轮菱形月球车移动系统的动力学建模与移动性能进行研究。
二、研究内容1. 四轮菱形月球车移动系统的动力学建模。
在考虑月球表面的复杂地形和低重力环境下,建立四轮菱形月球车的动力学模型。
2. 移动性能分析。
将动力学模型导入Simulink仿真软件中,分析四轮菱形月球车在月球表面的移动性能。
主要包括平稳驾驶、上下坡行驶和不同路面情况的行驶分析。
3. 最优控制方法研究。
通过对四轮菱形月球车的移动性能分析,研究最优控制方法,提高其在月球探测中的实用性。
三、研究计划第一年:1. 调查四轮菱形月球车结构,分析月球车移动系统的特点;2. 初步建立四轮菱形月球车移动系统的动力学建模;3. 探究平稳驾驶、上下坡行驶和不同路面情况的四轮菱形月球车移动性能。
第二年:1. 完善四轮菱形月球车移动系统的动力学模型;2. 对动力学模型进行仿真模拟;3. 研究最优控制方法,提高月球车在月球探测中的实用性。
第三年:1. 分析仿真结果;2. 优化动力学模型;3. 进行实验验证。
四、预期成果1. 完善了四轮菱形月球车移动系统的动力学模型;2. 对四轮菱形月球车在月球表面的移动性能进行了系统分析并获得仿真模拟结果;3. 研究出最优控制方法,提高月球车实用性;4. 验证了动力学模型和控制方法的有效性,并为月球车的改进提供了数据和参考。
月球探测车转向系统动力学建模与分析
车轮侧压力 FS p主要由车轮侧滑角α反映 , 即有 FS p/ FN = kα (λ S , vW) α 侧滑角系数 kα (λ S , vW ) 是 λ S 、 vW 等的非线性函数 。对于实际的月球探测车来说 , λ S 和 vW 都比较小 , 可将 kα 近似看作常数 。则 αFN ( 14) FS p = kα
2 转向运动学
本文研究的探测车采用六轮摇臂式底盘结构 , 整车 结构如图 1 所示 。采用六轮独立驱动 , 前后四轮协调转 向 。在研究探测车的转向问题时 , 对系统作如下考虑 : 1) 所有车轮均看作刚性车轮 ; 2) 各车轮的几何尺寸完 全相同 ; 3) 不考虑探测车的垂直及俯仰运动 , 不计侧 倾影响 。
侧向力 。
FLf , FLm , FLr : 前轮 、中轮 、后轮所受的
纵向力 。
lf , l m , l r : 前轮 、中 轮 、后 轮 至 车 体 质
心的距离 。 ψ: 探测车航向角 。 β: 探测车质心侧偏角 。 ωZ : 探测车绕 Z 轴的横摆角速度 ( 偏航角 速度 , 即 ψ ) 。 v R : 探测车的车速 。
3 转向动力学建模
在转向动力学研究中 , 需要着重考虑车轮侧偏与侧滑的影响 , 这是松软路面给转向系统带来的 突出影响 。转向动力学模型如图 3 所示 。参数定义如下 : δ f, δ r : 前轮 、后轮的转向角 。 α f, α m, α r : 前 轮 、中 轮 、后 轮 的 侧 滑 角。
FSf , FSm , FSr : 前轮 、中轮 、后轮所受的
tanα,
ωW ≥ vWcosα Πr ωW < vWcosα Πr
( 9)
先讨论车轮纵向力 FL 的计算 。主动驱动的刚性车轮在松软土壤上运动时的作用力如图 5 所 示 [ 7 ] 。可以推得 [ 7 ]
月球探测车的运动学建模
图)
月球探测车的基本结构
月球探测车的摇臂 ’ 转向架式移动系统具 有 % 个自由度, 在转向架和摇臂之间存在 & 个自由 度, 其左右两侧的转动角度用!! 和 !& 表示; 通过 横轴连接的左右摇臂之间的角度用"! 和"& 表示, 也可用单一的约束角度"表示, 即" ( "! ( ’ "& ; 前面 & 个转向车轮的转向角度用#! 和#& 表示, 且 " ! #! ! &9") , " ! #& ! &9") ; ( 个驱动车轮的转
邓宗全 胡 明 高海波 王少纯
摘要: 给出了六轮摇臂 $ 转向架式月球探测车的运动学建模方法。该 模型共有 ( 个自由度, 包括沿 ! 、 "、 # 方向的移动和绕 ! 、 "、 # 方向的转动。 为了获得月球探测车的位置和姿态, 正运动学方程由车轮的雅可比 ( )*+,矩阵推导, 并对矩阵方程进行了求解; 逆运动学方程为已知探测车本体 ./*0) 的运动速度, 确定单个车轮的驱动速度, 以达到期望的探测车位姿。该运动 学模型为月球探测车的运行、 运动控制系统的设计及自主导航提供了理论 基础。 关键词: 月球探测车; 运动学建模; 摇臂 $ 转向架式移动系统; 移动机器人 中图分类号: 12&#& 3 % 文献标识码: 4 二者之 有 ( 个车轮。两侧的摇臂通过横轴连接, 间有一个转动自由度。探测车主车体装在横轴 上, 且其重心位于横轴中心铅垂线的下方, 主车体 的俯仰为两侧摇臂的平均俯仰, 其具体结构见图 &。
松软月面上月球车动力学建模及运动控制研究
2
月球车仿真模型的建立
目前并没有发现可开放的能够反映轮壤相互作用并且
变形应力主要包括法向应力和剪切应力。应力模型与车轮坐 标系定义如图 2 所示 。
[9]
具有可视化功能的动力学仿真软件。日本东北大学的研究 者编写了 SpaceDyn 动力学仿真的开放代码, 但是需要借助 其他图形工具才能实现可视化。考虑到 ADAMS 是有效的 多体动力学分析软件, 可以对其进行二次开发, 将轮壤相互
(II)
Fo
F
Fτ
(III) Fv F (IV)
Tf b2 Fv Fp b1
(5)
(V)Tb
Tc
Fv Fp
Fp
σ m 为最大法向应力, 式中, 且 kc + k ϕ)(cos θ m - cos θ f )n b θ m 为最大法向应力对应的角度, 且 σm = r n( θ m = (a0 + a1 s)θ f
j(θ) = r[θ f - θ - (1 - s)(sin θ f - sin θ)]
(3)
(10)
z s 为静态下陷量 上述公式中, W 为车轮所受垂直载荷 (N) ; (m) ; σ (θ) 为法向应力 (Pa) , 其计算公式如下: kc σ (θ) = ( + k ϕ)r n (cos θ - cos θ s)n (4) b n+1 n+1 k c 为壤内聚模量 kφ 为月壤摩擦模量 ( N/m ) ; ( N/m ) ; n 为下陷模
式中第一项为附着力, 第二项为压实阻力和滚动过程中产生 的推土阻力之和。垂直方向合力为:
F z = rb θ (τ x (θ)sin θ + σ (θ)cos θ)dθ
r
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 引言
无人驾驶的探测车( 漫游机器人) 是月球及行星表面探测的重要工具。月球探测车在月球表面自 主行驶时所面临的环境十分复杂。为提高探测车的自主性与安全性, 需要研究其在松软土壤上的动 力学特性。转向系统是探测车运动系统的重要组成部分, 其性能直接影响探测车的平稳性和机动能 力。
( 21)
转向系统的性能主要体现在平稳性和机动能力两方面。决定转向系统性能的 3 个主要变量是探
18
中国空间科学技术
2004 年 6 月
测车车速 v R、车体质心侧滑角 ∀ 和转向角速率( 航向角速率) #Z。探测车在转向时其纵向速度的变
化一般较小, 因此在转向动力学研究中, 着重考虑沿 YR 轴方向的侧滑运动及绕 ZR 轴的横摆运动,
( 16)
vWm = ( vRcos∀) 2 + ( vRsin∀+ #Zl m ) 2
( 17)
vWr = ( vRcos∀) 2 + ( vRsin∀- #Zl r) 2
( 18)
对于前轮, 由速度投影关系可知
vWfsin( f - f ) = vRsin∀+ #Zl f
vWf cos( f - f ) = vRcos∀
在汽车动力学领域, 已对车辆前轮、后轮及多轮转向问题进行了较为深入的研究[ 13 \ , 但汽车 动力学主要研究的是充气轮胎在结构化刚性路面上的操纵稳定性问题, 而月球表面大多数地方都覆 盖着由细尘和碎岩组成的月壤层。月壤层的土壤多数比较松软, 密度比地球上的沙质土壤小[ 4] 。因 此对月球探测车来说, 车轮的接触环境主要是松软土壤, 车轮存在下陷和滑移, 这给转向系统的分 析与设计带来了较大困难。本文针对松软路面的特性, 深入研究了探测车四轮转向系统的动力学问 题。论文给出了六轮月球探测车的四轮转向运动学计算公式, 推导了探测车在松软土壤上的四轮转 向动力学模型, 提出了合理的简化方法, 并对稳态特性进行了相应的分析。
14
中 国空 间 科学 技 术
2004 年 6 月
CHINESE SPACE SCIENCE AND TECHNOLOGY
第 3期
月球探测车转向系统动力学建模与分析
王佐伟 吴宏鑫
( 北京控制工程研究所, 北京 100080)
摘要 月球探测车在月球表面松软土壤上的转向动力学特性比较复杂。文章在已有的 车辆地面力学成果的基础上, 研究了探测车在松软的月球表面土壤上的转向动力学问题。 给出了六轮月球探测车的四轮转向运动学计算公式, 推导了探测车在松软土壤上的四轮转 向动力学模型, 提出了合理的简化方法, 并对稳态特性进行了相应的分析。所得到的结果 为探测车转向系统设计及控制算法研究提供了依据。
&
&
&
&
# # # # FL = rb[ 1 ∃1( &) cos &d &+ m ∃2( &) cos&d&- 1 ∋1( &) sin&d&- m ∋2( &) sin&d &]
&m
&2
&m
&2Байду номын сангаас
( 10)
式中 ∃1 ( &) 、 ∃2 ( &) 、 ∋1 ( &) 、 ∋2 ( &) 分别是切向应力 ∃( &) 和法向应力 ∋( &) 在前部区[ &m, &1] 和
成果的基础上[ 5, 6] , 本文提出一种基于分解滑移率的车轮作用力简化公式。
考虑刚性车轮在松软土壤上的运动( 图 4) 。记 为车轮侧滑角, #W 为车轮角速度。分别定义 纵向滑移率( 又称滑转率) %L 和侧向滑移率 %S 为
( r #W - vWcos ) / r #W,
r#W ∀ vWcos
( 4)
式中 dL 为前后轮轴距; d B 为车宽; fl , fr, rl , rr分别为左前轮、右前轮、左后轮、右后轮的 转向角。
由上式可知, 当 dB/ 2 RSsin S 时, 左右轮的转向角相差不大, 即 fl fr, rl rr。对于通 常的转向任务, S 一般选在 90!附近, R S 也比较大, 因此这种近似关系通常是满足的。对于实际 的月球探测车来说, 为简化转向系统设计, 减轻质量, 一般可采用左右协调联动的转向方式, 这在 汽车理论中称为 Ackerman 转向方式。在前后轮双 Ackerman 转向方式下, 当车体尺寸较小时, 可认 为左右轮的转向角近似相等。因而可将左右两轮等效成集中在一起的单轮, 则月球探测车的转向系 统模型可表示为图 3 所示。
3 转向动力学建模
在转向动力学研究中, 需要着重考虑车轮侧偏与侧滑的影响, 这是松软路面给转向系统带来的 突出影响。转向动力学模型如图 3 所示。参数定义如下:
f, r: 前轮、后轮的转向角。
f, m, r: 前 轮、中 轮、 后 轮 的 侧 滑 角。
FSf, FSm , FSr: 前轮、中轮、后轮所受的
车轮底缘的切向应力 ∃S 可根据滑动摩擦原理计算, 即
∃S( &) = (∃∋( &)
式中 (∃ 为土壤滑动摩擦系数, ∋ ( &) 为法向应力。
在车轮底缘接触区[ &2, &1] 对 ∃S( &) 积分得
# # FS∃ = rb [ &1 (∃∋1( &) d&+ &m (∃∋2( &) d&] = (∃F∋
2004 年 6 月
可建立动力学方程
m0 ax = 2( FLfcos f + FLm + FLrcos r - FSf sin f + F Srsin r)
( 5)
m0 ay = 2( FLf cos f - FLrs in r + F Sf cos f + F Sm + FSrcos r)
( 6)
则有 tan ( f -
f) =
vRsin ∀+ #Zl f vRcos ∀
由于车轮侧滑角( f, m, r ) 和质心侧滑角 ∀ 一般都较小, 因此可得到如下的侧滑角计算式
f = f - ∀- ( #Zl f / v R)
( 19)
m = ∀+ ( #Zl m / v R)
( 20)
r = - r - ∀+ ( #Zl r/ v R)
17
土壤, e 的取值范围为[ 0. 05, 0. 3] 。
式( 11) 作为一种半经验拟合公式, 揭示了 F L 与 %L 之间的非线性关系, 并使 FL 的计算得到了 很大简化。因此, 该式的价值主要体现在控制器设计上。在闭环控制系统中, 系数 a0, a1, a2 可 通过参数辨识进行调整。
下面讨论车轮侧向力 FS 的计算。侧向力是由转向离心力引起的车轮侧滑而产生的, 由两部分 组成: 车轮底缘接触区的切向力 F S∃和车轮侧面所受的侧压力F Sp , 如图 6 所示。
&
&
( 12)
m
2
根据法向应力 ∋ 和纵向切应力 ∃ 的分布特性, 可近似认为其各自的合力作用力位于 &1/ 2 处( 图 7) 。
则根据力的平衡关系, 有 F∋= FNcos ( &1/ 2) 。将其代入式( 12) 得
FS∃ = (∃FNcos( &1/ 2)
( 13)
车轮侧压力 FSp主要由车轮侧滑角 反映, 即有 FSp/ FN= k ( %S, vW) 侧滑角系数 k ( %S, vW ) 是 %S、vW 等的非线性函数。对于实际的月球探测车来说, 都比较小, 可将 k 近似看作常数。则
侧向力。
FLf , FLm , FLr: 前轮、中轮、后轮所受的
纵向力。
l f , lm, l r: 前 轮、中 轮、 后轮 至 车体 质 心的距离。
!: 探测车航向角。
∀: 探测车质心侧偏角。 #Z: 探测车绕 Z 轴的横摆角速度( 偏航角 速度, 即 !) 。 vR: 探测车的车速。
m0: 探测车的质量。
IZ #Z = 2l f ( F Lfsin f + FSfcos f) + 2lmFSm + 2l r( FLrs in r - FSrcos r)
( 7)
式( 5) ~ ( 7) 分别对应沿 X R 方向的纵向运动、沿 YR 方向的横向运动、绕 ZR 方向的横摆运动。 下面讨论 FLf、FLm、FLr、FSf、F Sm、FSr的计算。
转向运动学计算的任务可描述为: 给定瞬时转向中心( 由 转向方位角 S 和转向半径 RS 描述) , 求解各转向轮所需的转 向角。不计滑移, 在存在理想瞬时转向中心的条件下, 转向 运动学可由图 2 所示的几何关系得到:
图 2 转向运动学关系
fl = arctan[ ( dL / 2- RScos S) / ( R Ssin S - dB/ 2) ]
图 1 探测车整体示意图
2004 年 6 月
中国空间科学技术
15
如果四轮任意转向, 各轮的转向自由度之和超过所需的
转向自由度, 则车体的运动与各轮转向运动之间的关系是很
复杂的, 因为这是一个过约束 问题。在实际系统中, 需协调 各轮的转向, 其原则是使各轮的转向中心线尽可能相交于一
点, 称 为瞬时转 向中心 ( Instantaneous Center of Mot ion, ICM) , 如图 2 所示。
关系可用二次曲线来拟合。根据分析, 可得简化计算式
FL = [ a0( 1 + e) %2L + a1( 1- e) %L + a2] FN