[2011]基于挠性构件变形的谐波齿轮装配模型_陈晓霞
谐波齿轮减速器的设计研究
(6)谐波齿轮传动还可以向密封空间传递运动和动力,采用密封柔轮谐波传动减速装
置,可以驱动工作在高真空、有腐蚀性及其它有害介质空间的机构。 (7)传动效率较高,且在传动比很大的情况下,仍具有较高的效率。 目前,国外小模数精密谐波齿轮减速器多采用短筒柔轮、其体积小、重量轻、承载能
力高;我国采用的还是普通杯型柔轮,还没有生产短筒柔轮谐波齿轮减速器。几种国外短 筒柔轮谐波齿轮减速器与国产精密杯形齿轮减速器的主要参数见表1,国外柔轮结构比较见 图1
2.1 确定传动方案................................................................................................. 3 2.2 传动比的计算及钢轮柔轮的齿数................................................................. 5 2.3 柔轮和刚轮的材料.......................................................................................... 5
注:此表如不够填写,可另加附页。
主要参考资料(具体格式以规范化要求规定为准)
1.文献检索关键词:谐波齿轮传动 推杆减速器 变速轴承 2. 孙恒.机械原理[M].高等教育出版社,2001 3. 徐灏.机械设计手册[M].机械工业出版社,1995 4. 司光晨.谐波齿轮传动[M].国防工业出版社,1978 5. 饶振纲.行星齿轮传动的设计[M].化学工业出版社,2003 6.减速机信息网:/
术的研究。它是建立在弹性变形理论基础上的一种新型传动技术。1959年美国学者 C·W·
谐波齿轮——精密制造作业
一、简述谐波齿轮的原理及特点。
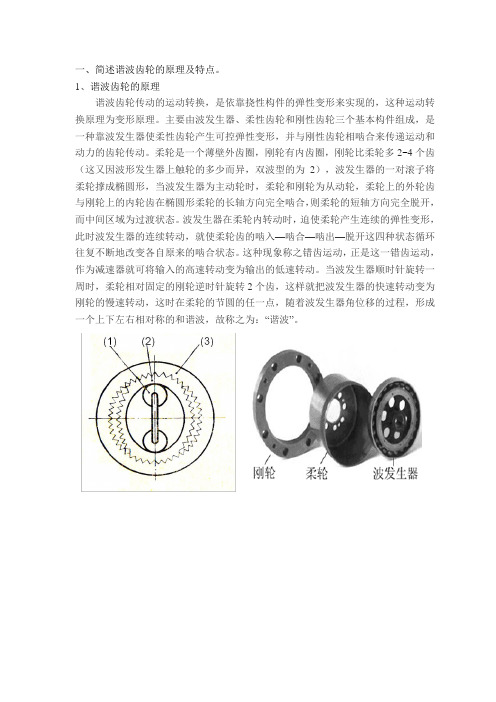
1、谐波齿轮的原理谐波齿轮传动的运动转换,是依靠挠性构件的弹性变形来实现的,这种运动转换原理为变形原理。
主要由波发生器、柔性齿轮和刚性齿轮三个基本构件组成,是一种靠波发生器使柔性齿轮产生可控弹性变形,并与刚性齿轮相啮合来传递运动和动力的齿轮传动。
柔轮是一个薄壁外齿圈,刚轮有内齿圈,刚轮比柔轮多2~4个齿(这又因波形发生器上触轮的多少而异,双波型的为2),波发生器的一对滚子将柔轮撑成椭圆形,当波发生器为主动轮时,柔轮和刚轮为从动轮,柔轮上的外轮齿与刚轮上的内轮齿在椭圆形柔轮的长轴方向完全啮合,则柔轮的短轴方向完全脱开,而中间区域为过渡状态。
波发生器在柔轮内转动时,迫使柔轮产生连续的弹性变形,此时波发生器的连续转动,就使柔轮齿的啮入—啮合—啮出—脱开这四种状态循环往复不断地改变各自原来的啮合状态。
这种现象称之错齿运动,正是这一错齿运动,作为减速器就可将输入的高速转动变为输出的低速转动。
当波发生器顺时针旋转一周时,柔轮相对固定的刚轮逆时针旋转2个齿,这样就把波发生器的快速转动变为刚轮的慢速转动,这时在柔轮的节圆的任一点,随着波发生器角位移的过程,形成一个上下左右相对称的和谐波,故称之为:“谐波”。
(1)谐波发生器(简称波发生器)(2)柔性齿轮(简称柔轮)(3)刚性齿轮(简称刚轮)图一谐波齿轮2、谐波齿轮特点(一)优点(1)结构简单,体积小,重量轻。
主要构件只有三个,与传动比相当的普通减速器比较,其零件减少50%,体积和重量均减少1/3左右或更多。
(2)传动比范围大。
一般单级传动比可在50~500范围内变化;当采用行星式波发生器时为150~4000;若采用双级传动或复式传动则可达2×106。
(3)同时啮合齿数多。
在承载情况下,双波传动的啮合齿数一般可达总齿数的30~40%左右,三波传动则更多。
而普通渐开线圆柱齿轮同时啮合的齿数一般为两对左右,即重叠系数小于2。
(4)运动精度高。
谐波齿轮传动原理和技术

63V OCATIONAL TECHNOLOGY z yj 技术课堂谐波齿轮传动原理和技术黑龙江王中孚吴广林李洪斌张敏于兴胜职业技术一、谐波齿轮传动的原理谐波齿轮传动由三个基本构件组成:波发生器H 、作为挠性构件的柔轮1和刚轮2。
在未装配之前,柔轮的原始剖面呈圆形;刚轮是一个刚性的内齿轮,柔轮的齿数Z1比刚轮齿数Z2少1至几个齿;波发生器H 由一个椭圆盘,也可由转臂和几个圆盘构成等多种形式,通常有标准椭圆、双偏心圆、余弦闭合曲线、里隆勒曲线(Resal)、偏心盘作用下的和滚轮发生器作用下的闭合曲线等。
波发生器的最大直径比柔轮内径略大。
把波发生器装入柔轮时,迫使柔轮产生变形,在其长轴两端的齿轮恰好与刚轮齿完全啮合,短轴处的齿侧完全脱开。
而处于波发生器长轴和短轴之间沿周长不同区域内的齿,视柔轮回转方向的不同,则处于某些啮合或某些啮合的不同过渡状态,当波发生器回转时,柔轮的长轴和短轴的位置不断改变,这样由波发生器控制的柔轮变形部位随转角φ的不同而改变,从而传递了啮合运动。
在传动的过程中,波发生器转一周,柔轮上某点变形的循环次数称为波数。
如以椭圆形波发生器传递啮合时为例,变形后柔轮上各点相对于未变形柔轮的运动,在以变形长轴为起点展开后,近似呈具有两个全波的余弦曲线的连续简谐波形,称为双波传动。
其余类推,有单波、三波,考虑到柔轮的疲劳寿命,一般波数不大于三,双波是最常用的。
一般情况下,有一个输入运动时,能获得一个确定的输出运动。
在三个构件中,必须有一个固定的,即所谓的行星型机构,三个构件中其余两个一个若为主动,另一个即为从动。
其相互关系根据需要可以互换,有时为了满足某种使用要求,亦可做成三个构件均不固定的差动型的机构,以用于将两个输入运动合成一个确定的输出运动,或将一个输入运动分解为两个不确定的输出运动。
同时,当刚轮固定,波发生器主动,而柔轮从动时,由相对运动原理不难证明,柔轮中线上任一点的轨迹近似呈内摆线,且柔轮转向与波发生器的转向相反;而当柔轮固定,刚轮从动时,波发生器的转向与刚轮的转向相同。
基于Solidworks的渐开线齿轮建模方法研究

基于Solidworks的渐开线齿轮建模方法研究王晓毅;陈晓霞【摘要】齿轮传动是机械系统中应用广泛的一种传动形式,其中以渐开线齿轮应用最广泛.齿轮建模是齿轮传动机构仿真的基础.因此,提出一种基于solidworks软件本身来进行渐开线齿轮建模的方法,该方法不仅可以绘制出准确的渐开线齿廓,且操作方便,能满足三维仿真的要求.【期刊名称】《装备制造技术》【年(卷),期】2013(000)001【总页数】3页(P44-46)【关键词】渐开线;齿轮;建模;solidworks【作者】王晓毅;陈晓霞【作者单位】天津工业大学机械工程学院,天津300160;天津工业大学机械工程学院,天津300160;天津工业大学现代机电装备技术天津市重点实验室,天津300160【正文语种】中文【中图分类】TH132.41齿轮的精确建模是齿轮的有限元分析(CAE)及其齿轮系的动态仿真(VE)的基础。
通过描点法建立的渐开线齿廓不精确[2],通过编程的方法绘制渐开线对于初学者来说不易掌握[3],通过第三方插件设计齿轮需要得到开发商的授权[2]。
因此,本文利用solidworks的放样曲面法绘制渐开线,建立渐开线齿轮模型。
介绍了此种方法的建模过程,不仅可以绘制出准确的渐开线,且建模过程简单,同时满足有限元分析和动态仿真的需要。
1 渐开线概述1.1 渐开线的性质当直线BK沿圆周作纯滚动时,直线上任意一点K的轨迹AK称为该圆的渐开线(如图1)。
该圆称为基圆,半径为rb;直线BK称为发生线,θk称为展角。
图1 渐开线参数图渐开线具有下列性质:(1)发生线沿基圆滚过的长度,等于基圆上被滚过的弧长,即弦KB等于弧AB。
(2)渐开线上任一点的法线必与基圆相切。
(3)渐开线上各点的曲率半径不同,渐开线在基圆上起始点A处的曲率半径为零;离基圆远的点其曲率半径大。
(4)基圆的大小决定渐开线的形状,基圆愈大,渐开线愈平直。
(5)基圆内无渐开线。
1.2 渐开线齿廓的压力角如图1所示,点K为渐开线上任意一点,其矢径用rk表示。
[2016]渐开线谐波齿轮的空间齿廓设计及啮合特性分析_刘邓辉
![[2016]渐开线谐波齿轮的空间齿廓设计及啮合特性分析_刘邓辉](https://img.taocdn.com/s3/m/002764e8f705cc1754270908.png)
机械设计第33卷第3期*收稿日期:2014-07-14;修订日期:2015-09-16基金项目:浙江大学CAD&CG 国家重点实验室开放课题资助项目(A1515);天津市应用基础及前言技术计划资助项目(14JCYBJC19200);国家自然科学基金资助项目(51575390)渐开线谐波齿轮的空间齿廓设计及啮合特性分析*刘邓辉1,邢静忠1,2,陈晓霞1(1.天津工业大学机械工程学院,天津300387;2.天津市机电装备技术重点实验室,天津300387)摘要:考虑杯形柔轮在波发生器作用下的锥度变形特征,设计刚轮空间齿廓可有效降低齿间侧隙,提高谐波齿轮的啮合性能。
在垂直于轴线的多个横截面内,将刚轮空间齿廓设计转化为由多个平面齿廓放样算法表达的空间曲面设计。
在各横截面利用精确算法的共轭方程求解获得共轭齿廓离散点,基于渐开线齿廓特征对各截面内的共轭齿廓离散点拟合得到相应的变位系数。
利用基于精确算法的变形后柔轮轮齿位置定位方法设计了相应的侧隙计算方法,获得空间齿廓在不同截面内的侧隙分布。
为验证由多个截面内齿廓放样获得的空间齿廓的啮合性能,采用SolidWorks 建立刚轮和柔轮的空间齿廓装配模型,并进行干涉检查和侧隙结果验证。
实例验证表明:相比平面齿廓,空间齿廓能增大啮合区间和齿廓接触面积,更多的啮合齿对保证了空间齿廓谐波齿轮具有更高的承载能力和更长的疲劳寿命。
关键词:谐波齿轮;渐开线齿形;空间齿廓;干涉;三维模型中图分类号:TH132.41文献标识码:A文章编号:1001-2354(2016)03-0024-06Spatial tooth profile design and engagement analysis of harmonic gearwith involute profileLIU Deng-hui 1,XING Jing-zhong 1,2,CHEN Xiao-xia 1(1.School of Mechanical and Electronic Engineering ,Tianjin Polytechnic University ,Tianjin 300387;2.Tianjin Key Laboratory of Advanced Mechatronics Equipment Technology ,Tianjin 300387)Abstract :The taper deformation of the cup-shaped flexspline was produced by cam wave generator.In order to improve meshing performance and reduce gear backlash ,the spatial tooth profile of circular spline was presented.In the multi cross sec-tions perpendicular to the axis ,the spatial tooth profile of circular spline was constructed with a series plane tooth profile of space curved surface using lofter modeling.The conjugate tooth profile discrete points were obtained using precision algorithm adjoint equation in every cross section.The relative backlash calculation method was designed to obtain the backlash distribu-tion of spatial tooth profile in the different sections.An assembly model of a circular spline and a flexspline with spatial tooth profile was established in Solid W ork platform to check the interference and backlash results ,which provided the backlash of spatial tooth profile to assess the engagement performance.The experiment verification revealed that the spatial tooth profile can increase the meshing domain and contact area compared with plane tooth profile.The improved loading capacity and fatigue life of harmonic drive could be obtained by more engaged teeth pairs.Key words :harmonic gear ;involute profile ;spatial tooth profile ;interference ;three-dimensional models在谐波传动中,建立在弹性变形基础上的刚轮与柔轮之间的传动属于空间弹性共轭范畴[1-3]。
谐波齿轮传动柔轮的变形分析
谐波齿轮传动柔轮的变形分析祝海林;蒋宇;王铖龙;钱志达;宁鹏【摘要】柔轮是谐波齿轮传动装置的主要部件,柔轮的变形直接影响柔轮的应力、寿命及谐波齿轮传动机构工作的可靠性.本文通过理论推导,建立了双波谐波齿轮传动环形柔轮变形量、截面弯矩的计算模型,提出了柔轮变形敏感度的概念,并对柔轮变形的敏感度与中性层曲率半径变化进行了仿真,得出了柔轮齿数的合理取值范围及柔轮圆环危险截面的位置,可为柔轮的性能分析、改进设计提供参考.%Flexible gear is the chief part in harmonic gear drive. The deformation of flexible gear affects directly the stress, worklife of Flexible gear and the reliability of harmonic gear drive. In this paper, the computation model for deformation and cross - section moment on ring-flexspline of two-wave harmonic gear drive is established theoretically. A concept of deformation sensitivity on flexible gear is put forward. Reasonable value for gear-number and the location for critical section of ring-flexspline are concluded based on the simulative analysis about deformation sensitivity and curvature radius of neutral layer for ring-flexspline, which is for reference to analyze the features and then to improve or redesign on current used flexspline.【期刊名称】《制造技术与机床》【年(卷),期】2013(000)003【总页数】5页(P150-154)【关键词】谐波齿轮传动;柔轮;中性层;变形敏感度;危险截面【作者】祝海林;蒋宇;王铖龙;钱志达;宁鹏【作者单位】常州大学机械工程学院,江苏常州 213016【正文语种】中文【中图分类】TH132.43谐波齿轮传动是上世纪50年代后期为适应空间科学、宇航尖端技术的发展而出现的一种新型传动技术,它具有结构简单、传动比大、承载能力高、齿面相对滑动速度低、传动平稳、噪声小等优点[1],所以在航天航空、仿生技术、原子反应堆、机床、仪器仪表、机器人、汽车、常规武器、印刷机构及医学器械等领域得到了广泛应用[1-2]。
谐波齿轮减速器设计及性能仿真
毕业设计(论文)题目谐波齿轮减速器设计及性能仿真学院机械设计制造及其自动化专业学生姓名学号指导教师系主任二级学院院长摘要谐波齿轮传动具有体积小、重量轻、结构紧凑、传动比大、效率高等优点。
广泛应用于矿山、冶金、飞机、轮船、汽车、起重机、电工机械、仪表、化工业等许多领域谐波齿轮传动有着广泛的发展前景。
谐波齿轮减速器与普通减速器相比具有体积小、重量轻、传动平稳、效率高、传动比范围大等优点。
但其设计计算较过程复杂,轴承的受力较大、寿命较短。
所以对于我们在设计这类减速器时如何进行参数的选择,避免大量繁杂的计算,如何选择好轴承使其使用寿命增加具有一定的设计意义。
对谐波减速器国内外的发展现状、优缺点、结构型式和其传动原理进行了一定的阐述。
在设计过程当中,对内啮合传动产生的各种干涉进行了详细验算;从如何提高轴承的寿命为出发点,来计算选择减速器齿轮的模数,最终合理设计减速器的整体结构。
关键词:谐波传动;减速器;内齿轮副AbstractHarmonic gear drive with small size, light weight, compact structure, transmission ratio, and high efficiency. Widely used in mining, metallurgy, aircraft, ships, cars, cranes, electrical machinery, instruments, chemical and many other fields of harmonic gear drive has a broad development prospects.Harmonic gear reducer reducer with ordinary compared with the small size, light weight, smooth transmission, high efficiency, transmission ratio range and so on. However, compared with its design and calculation process is complex, larger force bearing short-lived. Therefore, how we choose the parameters in the design of this type of reducer, to avoid a large number of complex calculations, how to choose to increase the service life of the bearings so that it has a certain design significance.Harmonic reducer development status at home and abroad, the advantages and disadvantages, structure type and its transmission principle, which must be explained. In the design process, various internal mesh transmission interference generated detailed checking; from how to improve bearing life as a starting point to calculate modulus choose Gear ultimately rational design of the overall structure of the gear unit.Keywords: harmonic drive; reducer; internal gear pair目录摘要................................................................................................... I I Abstract .. (III)第1章绪论 (1)1.1 概述 (1)1.2谐波齿轮减速器研究内容拟解决的问题 (1)1.3 本文研究主要内容 (2)第2章谐波齿轮减速器设计 (3)2.1.传动结构形式的选择 (3)2.2.几何参数的计算 (3)2.3 凸轮波发生器及其薄壁轴承的计算 (4)2.3.1柔轮齿面的接触强度的计算 (5)2.3.2柔轮疲劳强度的计算 (6)2.4 轴结构尺寸设计 (7)2.5 轴的受力分析及计算 (7)2.6 轴承的寿命校核 (8)2.7 销轴的强度校核计算 (10)2.8 输入轴的强度校核 (10)2.9 键的校核计算 (13)2.9.1 联轴器处键的校核 (13)2.9.2 偏心套处键的校核 (13)2.9.3 支座处键的校核 (13)2.10 轴承的校核计算 (13)第3章谐波齿轮减速器三维设计图 (20)总结 (22)致谢 (23)参考文献 (24)第1章绪论1.1 概述随着现代工业的高速发展,机械化和自动化水平的不断提高,各工业部门需要大量的减速器,并要求减速器体积小,重量轻,传动比范围大,效率高,承载能力大,运转可靠以及寿命长等。
[2011]基于挠性构件变形的谐波齿轮装配模型_陈晓霞
实例验证了所提方法的有效性。
关键词: 谐波齿轮; 柔轮; 装配模型; 挠性构件; 变形; 参数化
中图分类号: T P391. 72
文献标志码: A
Assembly model of harmonic gear based on elastic component deformation
C H E N X iao-xia1 , L I N Shu-z hong 1, X I N G J ing-z hong1, LIU Yu-sheng2 ( 1. T ia njin M unicipal Key Lab of M ode rn M echanical Equipment T echno log y, T ianjin Po ly technic U niver sity,
Open Project Program of S tate Key Lab of CAD& CG, China( No. A1114) .
第2期
陈晓霞 等: 基于挠性构件变形的谐波齿轮装配模型
339
系统中直接指定装配关系来建立其装配模型。但谐 波齿轮的啮合分析及运动仿真等都必须在装配变形 后的状态下完成 [8 ] 。因此需要建立基于挠性构件变 形的谐波齿轮装配模型, 从而直观显示工作状态、轮 齿干涉和侧隙分布等, 以检验其设计的合理性和传 动性能。
w ( U) =
w0 P/2 - 4 /P
sin
U+
P 2
-
U cos
U-
4 P
。( 4)
( 4) 余弦凸轮波发生器
余弦凸轮波发生器作用下柔轮中性层变形曲线
的径向位移表示为
w ( U) = w0 cos 2U。
毕业设计谐波齿轮减速器设计及性能仿真
毕业设计谐波齿轮减速器设计及性能仿真设计背景谐波齿轮减速器是一种高效率、高减速比的减速器,其结构由谐波发生器、柔和环和若干对谐波轮组成。
利用谐波轮在柔和环的摩擦作用下的弹性变形,从而实现高减速比的传动。
谐波齿轮减速器结构紧凑、重量小,广泛应用于精密机床、机械手、航空航天等领域。
本次毕业设计旨在设计一种谐波齿轮减速器,并对其性能进行仿真分析。
设计步骤1. 确定减速比和输出转矩减速比是指减速器输出轴的转速与输入轴转速之比。
根据实际应用需求,本设计选择减速比为10∶1。
同时,在确定减速比的同时,需要根据应用场景的要求,确定输出转矩。
本设计选择输出转矩为100N•m。
2. 选择谐波轮和柔和环的参数谐波轮和柔和环的参数是谐波齿轮减速器设计中最关键的参数。
它们的选择直接影响减速器的性能。
本设计选择的参数如下:谐波轮齿数为120,柔和环齿数为108,柔和环弹簧刚度为1.5×10^7 N/m,柔和环内径为80mm。
3. 计算齿轮模数并绘制齿轮图样根据选择的谐波轮和柔和环参数,可以计算出齿轮模数。
本设计选择的齿轮模数为2.5。
根据齿轮模数画出齿轮图样,为了保证减速器的精度和寿命,齿轮图样应有合理的一些设计和制造要求,如齿数、齿形、端面接触等,应结合《机械设计手册》等相关标准规定确定。
4. 进行性能仿真分析利用有限元软件,对设计的谐波齿轮减速器进行性能仿真分析。
主要对输出转矩、转速、传动效率、载荷能力等指标进行分析。
5. 完成制造和组装根据设计图样,完成谐波齿轮减速器的制造和组装。
在制造过程中,应根据标准图样、制造工艺和精度要求进行加工,结合凸轮磨削、砜强化等工艺手段,确保减速器的精度和质量。
设计结果通过以上设计步骤和性能仿真分析,得到谐波齿轮减速器设计参数和性能指标如下:- 减速比:10∶1- 输出转矩:100N•m- 谐波轮齿数:120- 柔和环齿数:108- 柔和环弹簧刚度:1.5×10^7 N/m- 柔和环内径:80mm- 输出转速:60 r/min- 传动效率:90%- 载荷能力:500N通过制造和组装,得到的最终谐波齿轮减速器实际输出转矩、转速和传动效率等参数均符合设计要求,并且具有较高的精度和稳定性,可以满足实际工程需求。
谐波齿轮减速器的设计与建模
谐波齿轮减速器的设计与建模作者:e(e)指导老师:ee[摘要]:谐波齿轮传动是50年代中期,随着空间技术的发展,在薄壳弹性变形的理论基础上发展起来的一种新型的传动技术。
我国从1961年开始谐波齿轮传动方面的研制工作,并且在研究、试制和使用方面取得了较大的成绩。
但是在民用产品应用中,谐波减速器存在着传动“爬行”和“丢步的现象严重影响其谐波齿轮类产品的设计制造,也制约着其产品的不断推广,是该产品亟待解决的技术难题。
本文主要介绍了谐波齿轮传动的原理,发展历史,应用领域,发展趋势及其优缺点。
前半部分介绍了谐波齿轮减速器的设计计算,为了更好地分析谐波齿轮传动,后半部分用PRO/E建立了三维模型。
写出了主要零件的绘制过程,并展示了各个零部件,最后给出了装配图。
[关键词]谐波齿轮,传动设计,三维模型,装配The design and modeling of harmonic gear reducerAuthor:e(e)T utor:e[Abstract]Harmonic gear transmission is developed with the of space science and thchnology in mid 50s,on the basis of elastic thin shell theory developed a new type of drive technology.So far ,we have already had dozen of units engaged in the research ofthis aspect in our country ,and developed into a variety of types of harmonic gear transimission deviced.In this field it had research at different level on all issues, but many problems still has not yet been determined,and some regularity has not revealed .such as civilian products,There is “crawling”and”lost step”phenomen on in the harmonic gear reducer transmission .So it is impact on the design of harmonic gear product manufacturing,also restrict the further promotion of its products.and solove the problem that exist in the transmission ,it isan urgent need of a job in the current this kind of products.This artical main introducted the theory harmonic gear reducer ,and the development history of harmonic gear drive application filed,development trend,advantagesand disadvantages.The former introduce the design and calculate of harmonic gear reducer.In order to analyze the harmonic gear drive ,The later part with PRO/E to establish the three-dimensional model.Write the drawing process of the main parts .and showing all the parts .Finally ,given the assembly diagram.[ Key words]:Harmonic gear ,Transmission design,Three-disminsional model ,Assemble.目录1.绪论 (1)1.1选题的目的及研究意义 (1)1.2课题相关领域的研究现状和发展趋势 (1)1.3主要研究内容、途径及技术路线 (4)2.谐波齿轮减速器的传动方案的确定 ........................................... 错误!未定义书签。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在装配状态下, 柔轮的变形主要由波发生器的 形状决定。常见的几种机械波发生器如图 2 所示。 在波发生器的作用下, 柔轮的中性层曲线从变形前 半径为 rm 的圆形( 图中点划线圆) 变为非圆曲线( 图
( 1) 双圆盘波发生器
如图 2a 所示, 双圆盘波发生器利用与波发生器
轴线偏心距为 e 的圆盘迫使柔轮实现最大变形量为
Open Project Program of S tate Key Lab of CAD& CG, China( No. A1114) .
第2期
陈晓霞 等: 基于挠性构件变形的谐波齿轮装配模型
339
系统中直接指定装配关系来建立其装配模型。但谐 波齿轮的啮合分析及运动仿真等都必须在装配变形 后的状态下完成 [8 ] 。因此需要建立基于挠性构件变 形的谐波齿轮装配模型, 从而直观显示工作状态、轮 齿干涉和侧隙分布等, 以检验其设计的合理性和传 动性能。
A
w -
0
4
/
P[B
sin
U+
(
P 2
-
U)
cos Bco s U-
4 P
],
B< U[ P/2。
式中: A = si n B+
P 2
-
B
cos
B,
B=
cos
B+
B sin
B。
( 3) 双滚轮波发生器
如图 2c 所示, 双滚轮波发生器是四滚轮波发生
器在 B= 0 时的情况。双滚轮波发生器作用下柔轮
中性层变形曲线的径向位移表示为
中 Q所指示的粗实曲线) , 最大变形量为 w 0。
Q= r m + w( U) 。
( 1)
式中: r m 为变形前柔轮中性层圆曲线半径, w ( U) 为
变形后柔轮中性层曲线上点的径向位移。
挠性构件的建 模是 CAD 中的关键问题之一。 基于几何形变 [9 ] 和基于物理意义形变[ 10] 的 建模技 术广泛应用于弹性、柔软易变形物体的建模中。例 如在衣物布 料、人 及动物软 组织 器官[11 ] 的可视 化 中, 研究如何实时、逼真地显示模拟对象的变形过程 或状态。T heet ten[12 ] 等 提出样条曲线 的参数化 精 确动态建模方法, 用来模拟弹塑性变形的悬索、电缆 线等物体。谐波齿轮为传动部件, 为了能在装配模 型中准确表达装配状态柔轮和刚轮轮齿之间的啮合 情况, 反映其真实的工作状态, 精确计算变形后柔轮 轮齿的位置及其对称线的转角, 是建立其装配模型 的关键。
形, 其长轴端的齿与刚轮齿完全啮合, 短轴处的齿则 完全脱开; 当波发生器沿图 1 所示箭头方向转动时, 波发生器迫使柔轮产生波动变形, 使柔轮齿处于啮 合 ) 啮出 ) 脱开 ) 啮入 ) 啮合的不 断循环中, 从而 实现柔轮沿波发生器相反方向旋转, 其传动原理如 图 1 所示。现有谐波齿轮的设计和加工采用装配前 的状态, 柔轮为圆柱杯型特征[5-7 ] , 因此不能在通用 计算机辅助 设计( Com pute r Aided Desig n, CAD)
V ol. 17 N o. 2 F eb. 2 0 1 1
基于挠性构件变形的谐波齿轮装配模型
陈晓霞1 , 林树忠1 , 邢静忠1, 刘玉生2
( 1. 天津工业大学 现代机电装备技术天津市重点实验室, 天津 300160; 2. 浙江大学 CAD& CG 国家重点实验室, 浙江 杭州 310058)
摘 要: 依据柔轮装配前后的变形关系和中 性层曲线不 伸长条 件, 提 出采用 等分弧 长分布算 法来确 定装配 状
DOI:10.13196/j.cims.2011.02.116.chenxx.013
第 17 卷第 2 期 20 1 1 年2月
计 算机集成制造系统
Computer Integr ated M anufacturing Sy stems
文章编号: 1006 - 5911( 2011) 02 - 0338 - 06
31 2 变形后柔轮齿廓的计算
柔轮变形后, 轮齿不但在位置上发生了变化, 而 且轮齿对称线相对于径矢产生一个转角。假定固定
坐标系{OX Y } 与波发生器固连, Y 轴与波发生器的 长轴重合, 原点 O 位于波发生器的回转中心。动坐 标系{ O1 x1 y 1 } 与柔轮轮齿固连, y1 轴与柔轮齿的对 称线重合, 原点 O 1 位于中 性层曲线上。柔轮变形 后, 柔轮轮齿的分布沿环向不再等角度分布, 其齿根 位置 O1 可按等分弧长分布算法确定, 其齿廓对称 线 y1 相对 于齿根的径矢 OO 1 产 生转角 L, 如图 3 所示。
w ( U) =
(rm +
( w
rm 0)
+ w0 2 sin2
) ( rm U+ (
rm
w0 -
) w
0
)
2
co
s2
U
rm 。 ( 6)
3 等分弧长分布算法
31 1 轮齿齿根位置 变形前柔轮中性层曲线为圆曲线, 其轮齿均匀
分布在圆周上, 轮齿的位置等角度、等弧长分布; 根 据柔轮变形前后中性层曲线不伸长的假定, 变形后 轮齿的位置在中性层变形曲线上的分布仍然按等分 弧长分布。由于变形后柔轮的中性层曲线不再是圆 曲线, 致使柔轮轮齿的分布不再为等角度分布, 需要 根据等分弧长条件求出变形后轮齿位置。 31 11 1 周长计算
本文对不同的波发生器作用下柔轮中性层变形 曲线的解析表达进行归类, 提出了计算柔轮变形后 轮齿在中性层曲线上的位置及其对称线转角位移的 等分弧长分布算法, 给出了柔轮变形后三维模型的 参数化生成方法。在此基础上, 建立了基于不同波 发生器作用下谐波齿轮的装配模型。比较不同波发 生器作用下柔轮中性层曲线周长的变化情况, 分析 了等分弧长分布算法与圆环变形理论算法的差异, 并给出了算法验证和应用实例。
w 0, 图中: R 为圆盘的计算半径; e 为圆盘轴线相对
于波发生器轴线的偏心距; C为柔轮对圆盘的包角。
双圆盘波发生器作用下, 柔轮中性层变形曲线
的径向位移表示为
w ( U) =
w 0 ( A 1 cos U- B 1 ) /( A1 - B1 ) , 0 [ U [ C;
w 0 [( 1+
sin2 C) sin
U+
(
P 2
-
U) co s U-
2sin C- B1 ] /( A1 - B1 ) ,
C< U [ P。
( 2)
式中: A 1 =
P 2
-
C-
sin
Ccos
C, B1 =
4 P
co s C-
P 2
-
C sin
C。
( 2) 四滚轮波发生器 如图 2b 所示, 四滚轮波发生器利用与波发生器
长轴呈 B夹角的四个偏心滚轮, 迫使柔轮实现最大
T ianjin 300160, China; 2. Sta te K ey Lab of CA D& CG, Z hejiang U niversity , Hangzhou 310058, China) Abstract: A cco rding to shape s befo re & af te r f lex spline assembly , and on conditio n that neutral curve wa s unelo ng ated, an equal par ts algo rithm to de te rmine the tee th r oo t positions on neutral cur ve of flexspline and the orienta tions of the teeth in assembly state wa s presented. A metho d to g ene rate pa rametric flexspline part in assembly state w as sug gested. Comparing w ith the traditio nal appro ximate algo rithm and the e xact alg orithm of equivalent ring defo rma tion theo ry , results o f equal par ts algo rithm we re close to that o f the ex ac t algo rithm. T hen, an assembly mo del o f ha rmonic gea r based on e lastic co mpo nent defo rmation w as built, by which the backlash and mesh conditio n of teeth were show n intuitively. Finally , some ex amples were g iv en to illustrate the effectiveness o f the pro posed method. Key words: har monic gea r; flexspline; assembly mode l; elastic component; defo rmatio n; parameteriza tion
收稿日期: 2009-12-07; 修订日期: 2010-05-17。 Received 07 Dec. 2009; accep ted 17 M ay 2010. 基金项目: 浙江大 学 CAD& CG 国家重 点实验室 开放课题 资助项目 ( A1114) 。Foundation item: Project s upported by the Zhejiang University