电动装载机轮边驱动行走系统设计与研究
纯电动轮式装载机动力系统的仿真与研究

《装备制造技术》2018年第03期0前言随着能量消耗的不断增加,特别是空气污染的日趋严重,节能减排已成为当今中国最为迫切解决的问题之一。
工程机械作为大排放机械,技能减排势在必行。
因此,纯电动装载机应运而生。
纯电动装载机是指将动力电池或网电等作为能量源为整机提供动力以驱动整机作业行驶的机型。
目前,纯电动装载机多为单一的蓄电池来提供动力,但是蓄电池作为唯一的动力来源有很多缺陷:①蓄电池对温度比较敏感,给使用着带来诸多不便;②蓄电池的有限循环寿命,增加了使用者更换电源的费用;③废旧电池的环保问题。
超级电容作为新型的能源,它拥有蓄电池所不具备的优点:①有非常高的功率密度;②充电速度快;③循环寿命长,半永久性使用无需更换;④效率高;⑤低温性能优越[1]。
因此将超级电容作为辅助电源与动力电池组成联合体共同工作,组成蓄电池-超级电容的复合系统既可以将蓄电池的高比能量和超级电容的高比功率的优点结合到一起,又可以降低电动车辆对蓄电池大功率放电的限制要求,使系统同时满足动力性、经济性的要求,并对蓄电池起保护作用,大大延长蓄电池循环使用寿命,提高电动汽车的实用性,极有发展前途。
本文的研究为纯电动装载机单一电源和复合电源的比较,为现阶段纯电动装载机的研发提供一定的借鉴,复合电源的纯电动装载机相对于单一电源的纯电动装载机更有价值。
1复合动力系统装载机的结构复合动力系统装载机在动力系统与纯电动装载机有一定的区别,其储能装置是由蓄电池和超级电容联合提供。
超级电容与蓄电池构成的复合电源系统的拓扑结构主要有四种:①超级电容与蓄电池直接并联;②电源复合结构为蓄电池与DC/DC 变换器串联,然后再与超级电容并联;③电源复合结构为超级电容与DC/DC 变换器串联,然后与蓄电池并联;④超级电容、蓄电池均与DC/DC 变换器串联[2]。
综合比较,复合电源结构宜采用图1结构,如图1所示,超级电容与DC/DC 变换器串联后与蓄电池并联,蓄电池直接对外输出功率的方式提高了能量利用效率,超级电容通过DC/DC 变换器跟踪监测蓄电池组端电压,并调节自身电压,该种复合电源系统易于控制。
轮边综合驱动与转向电动车行走机构设计与分析

2 )选择 合适 的行 走 机构 主销 。减 少 转 向电 机
2 1 4月 1 0 0年 2日收到 第一作者简介 : 赵
动 态 模 拟 与仿 真 。
国家大学生创新性实验计划资助
鼎 (9 7 ) 河北 人 , 18 一 , 硕士研究 生 , 研究 方向 :
臂 一 杆 弹簧 ” 案 等 , 文 针 对 城 市 道 路 工 况 扭 方 本
复杂 、 速度 相 对 较 低 、 面平 坦 、 车 困难 等 特 点 , 路 泊
麓 盔
向量 转 篓 向 点塞 转 向
图 1 转 向 模 式 图
提 出了行走 机构 的设 计 目标 , 主销 参 数进 行 了选 对
旋 转运动 , 车轮跳 动 时 , 连接 车轮 的滑块 2相对 与主
制实 现传统 车横拉 杆 的 自适 应 功 能 , 这使 得 独 立转 向电动 车主销 立 的 系统 , 主销 内倾 角 与 主销 偏
移距不 能再起 到 回正 的作 用而 被设 为零 。驱 动 时 , 主销后倾 会 产 生 回 正 力 矩 , 而制 动 时 , 销 后 销 将 主
销 固连 的导 向机 构 3上 下 跳动 , 向 电机 4布置 在 转 机构 的上 方 。方 案 三 以 等长 双 纵 臂 悬 架 为 基 本 构 型 , 向 电机 2和 主销 1同轴布 置 , 和主销 通过导 转 并 向机构 的 约束共 同相 对 车架 跳 动 , 动 时 车辆 的轴 跳
1 1 设计 目标 .
1 行走机构方案设计及方案对比分析
针 对 的行 走机 构设计 提 出如下要 求 :
试验车多采用传统车辆 的转 向与悬架系统 , 这样做
带来 的 问题 是车 辆结 构 与 控 制算 法 不 匹 配 , 不能 充
XDE400矿用电动轮自卸车轮边减速器传动系统优化设计

XDE400矿用电动轮自卸车轮边减速器传动系统优化设计随着矿用电动车辆在矿山工作中的广泛应用,其轮边减速器传动系统的设计变得尤为重要。
XDE400矿用电动轮自卸车是一种性能卓越的矿用自卸车,其轮边减速器传动系统设计的性能直接影响了车辆的工作效率和可靠性。
本文将对XDE400矿用电动轮自卸车的轮边减速器传动系统进行优化设计,以提高其性能和可靠性。
1.现有轮边减速器传动系统存在的问题在XDE400矿用电动轮自卸车的现有轮边减速器传动系统中,存在一些问题需要优化。
首先,传动效率较低,造成能源的浪费。
其次,传动系统的结构设计不够合理,导致使用寿命较短,易出现故障。
另外,传动系统的噪音和振动较大,影响了车辆的舒适性和稳定性。
2.优化设计方案为解决上述问题,我们提出了以下优化设计方案:(1)优化传动结构针对现有传动系统结构设计不合理的问题,我们采用了新型的轮边减速器传动系统结构。
通过对齿轮、轴承和油封等关键部件的优化设计,提高了传动系统的使用寿命和可靠性。
此外,采用新型减震器和减振装置,有效降低了传动系统的噪音和振动。
(2)提高传动效率为提高传动效率,我们选用了高效率的传动部件和润滑系统。
优化齿轮的设计,减小齿轮传动时的能量损失;采用高质量的轴承和密封件,减少摩擦力和能量损失;优化油路系统,确保润滑油的充分循环和冷却。
这些措施有效提高了传动效率,减少了能源的浪费。
(3)增加智能化控制系统为提高矿用电动轮自卸车的自动化程度,我们增加了智能化控制系统。
通过传感器和控制器的精确监测和控制,实现了传动系统的智能化调节和优化。
例如,根据车速和工况自动调整传动比;实时监测传动系统的运行状态,提醒维护和保养。
3.结果与展望经过优化设计,XDE400矿用电动轮自卸车的轮边减速器传动系统性能得到了显著提升。
传动效率和可靠性大幅提高,传动系统的噪音和振动也得到了有效控制。
智能化控制系统的引入,使车辆的操作更加简便和安全。
未来,我们将继续研究和改进,不断提升矿用电动车辆的性能和可靠性,为矿山工作提供更好的技术支持。
一种轮边传动越野车辆电驱动系统设计
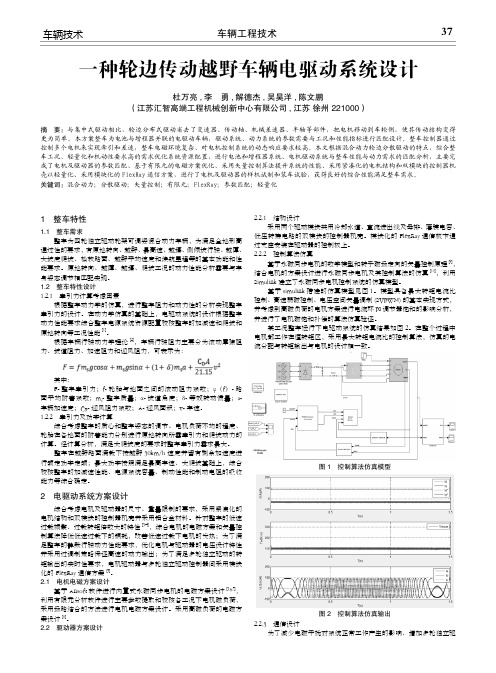
车辆工程技术37车辆技术1 整车特性1.1 整车需求 整车为四轮独立驱动轮架可调姿混合动力车辆,为满足全地形高通过性的要求,有原地转向、越野、最高速、越壕、侧倾坡行驶、越障、大坡度爬坡、松软路面、越野平均速度和续航里程等的基本功能和性能要求。
原地转向、越障、越壕、爬坡工况的动力性能分析需要与车身姿态调节相匹配实现。
1.2 整车特性设计1.2.1 牵引力计算考虑因素 根据整车动力学的仿真,进行整车阻力和动力性的分析实现整车牵引力的设计。
在动力学仿真的基础上,电驱动系统的设计根据整车动力性能要求综合整车电源系统资源配置校核整车的加减速和爬坡和原地转向等工况性能[1]。
根据车辆行驶动力学理论[2],车辆行驶阻力主要分为滚动摩擦阻力、坡道阻力、加速阻力和迎风阻力,可表示为: 其中: F-整车牵引力;f-轮胎与地面之间的滚动阻力系数;φ(f)-路面平均附着系数;m s -整车质量;α-坡道角度;δ-等效转动惯量;a-车辆加速度;C D -迎风阻力系数;A-迎风面积;v-车速。
1.2.2 牵引力及功率计算 综合考虑整车的质心和整车姿态的调节、电机负荷不均的程度、轮胎在各地面的附着能力分别进行原地转向所需牵引力和爬坡动力的计算。
经计算分析,满足大爬坡度的要求时整车牵引力需求最大。
整车在越野路面满载下按越野30km/h 速度并留有剩余加速度进行额定功率定额;最大功率按照满足最高车速、大爬坡基础上,综合校核整车的加减速性能、电源系统容量、制动性能和制动电阻的吸收能力等综合确定。
2 电驱动系统方案设计 综合考虑电机及驱动器的尺寸、重量限制的要求,采用紧凑化的电机结构和双模块的控制器机壳并采用铝合金材料。
针对整车的低速过载频繁、过载转矩倍数大的特性[3-4],综合电机的电磁方案和矢量控制算法降低低速过载下的铜耗,改善低速过载下电机的发热;为了满足整车的静默行驶动力性能要求,优化电机与驱动器的电压设计特性并采用过调制策略保证高速的动力输出;为了满足多轮独立驱动的转矩输出的实时性要求,电机驱动器与多轮独立驱动控制器间采用模块化的FlexRay 通信方案[5]。
ZL50轮式装载机转向系制动系及行走系的设计
ZL50轮式装载机转向系制动系及行走系的设计预览说明:预览图片所展示的格式为文档的源格式展示,下载源文件没有水印,内容可编辑和复制目录概述 (1)第一章用途与特点 (1)第二章技术性能参数 (2)2.1总体几何参数 (2)2.2性能参数 (3)2.3动力与主要传动部件 (3)2.4转向系统 (4)2.5制动装置 (4)2.6工作装置液压系统 (4)第三章主要总成结构及工作原理 (4)3.1发动机系统 (4)3.2传动与行走系统 (5)3.2.1变矩器 (5)3.2.2变速箱 (5)3.2.3传动轴 (6)3.2.4驱动桥 (6)3.2.5行走装置 (6)3.3转向系统 (6)3.4制动系统 (7)3.5工作装置 (7)3.6车架 (8)3.7工作装置液压系统 (9)3.8电器系统 (9)第四章牵引力性能计算 (10)4.1发动机及传动方案的确定 (10)4.2牵引性能的计算 (11)4.2.1变矩器原始特性 (11)4.2.2发动机原始特性 (13)4.2.3驱动力 (14)4.2.3.1发动机与变矩器共同工作的输入特性 (15)4.2.3.2发动机与变矩器共同工作的输出特性 (18)4.2.3.3驱动力和车速计算 (19)4.3牵引功率及牵引效率 (20)第五章驾驶与操作 (22)5.1新车走合 (22)5.2使用与操作 (22)5.3注意事项 (22)第六章技术保养 (22)参考文献 (23)附录概述机械系统设计课程设计的目的及内容一、目的机械系统设计课程设计是专业课最后一个实践环节,是机械系统设计的一次全面训练,为毕业设计打下了良好的基础,其目的是:(1)联系生产实际,培养能力;(2)学会并掌握机械系统设计的特点与方法;(3)加强机械系统中基本技能的训练;(4)巩固和加强机械零件的设计与制造工艺的知识。
二、内容课程设计的内容,选择具有代表性的工程机械作为设计对象。
(1)参数设计(2)系统设计(3)子系统设计第一章用途与特点本机是单斗、前卸、铰接、轮胎式小型装载机(见图1-1),广泛适用于城市建筑、道路维修、邮电通讯、煤气电力、粮食贮存、环境保护、水利施工以及集约化农副业生产等方面,进行铲装或短距离转运松土、砂石、煤炭、饲料、工业废弃物以及生活垃圾等松散物料;还能进行牵引、平地、堆集、倒垛等作业,是一种多用途、高效率的工程机械。
XDE400矿用电动轮自卸车轮边减速器传动系统优化设计

XDE400矿用电动轮自卸车轮边减速器传动系统优化设计XDE400矿用电动轮自卸车轮边减速器传动系统优化设计近年来,全球矿业行业迅猛发展,对矿用设备的性能要求也越来越高。
矿用电动轮自卸车作为一种常用的装载设备,其传动系统的性能优化至关重要。
本文将围绕XDE400矿用电动轮自卸车轮边减速器传动系统的优化设计展开探讨。
首先,我们需要对该传动系统的工作原理进行了解。
XDE400矿用电动轮自卸车采用了轮边减速器传动系统,其主要原理是通过减速器将电动机的高速旋转转换为合适的转矩和速度,从而驱动车辆的轮胎。
传动系统的优化设计需要考虑几个关键因素,包括传动效率、可靠性和运动性能。
传动效率是传动系统设计的重要指标之一。
通过优化齿轮的设计,减小传动系统的摩擦和损耗,可以提高传动效率。
在XDE400矿用电动轮自卸车的传动系统中,我们可以考虑采用高效率的齿轮材料和润滑剂,减少功率损耗,提高传动效率。
另一个重要因素是传动系统的可靠性。
矿山作业环境恶劣,传动系统需要能够承受大扭矩和高负荷的工作条件。
为了提高传动系统的可靠性,我们可以采用高强度、耐磨损的材料来制造齿轮和轴承。
此外,传动系统的运动性能也是需要优化的。
矿用电动轮自卸车在工作中需要具备较高的动力输出和灵活的操作性能。
通过合理设计齿轮的数量和模数,以及优化齿轮的齿形,可以实现传动系统的良好运动性能。
对于XDE400矿用电动轮自卸车轮边减速器传动系统的优化设计,可以采取以下几个步骤:首先,进行传动系统的参数计算和选择。
根据车辆的负载要求和工作条件,确定合适的传动比和转速范围。
同时,选择合适的齿轮材料和润滑剂,以提高传动效率和可靠性。
其次,进行齿轮的设计和制造。
根据传动系统的参数和要求,进行齿轮的模数选择、齿数计算和齿形优化。
在制造过程中,应注意使用高强度材料和精密加工工艺,确保齿轮的耐磨损性和几何精度。
最后,进行传动系统的试验和验证。
通过实际测试,检验传动系统的运动性能、传动效率和可靠性,并根据测试结果进行相应的调整和改进。
纯电动装载机电驱控制系统及控制方法研究

纯电动装载机电驱控制系统及控制方法研究摘要:随着社会经济的快速发展,工业领域对于减少能源消耗和碳排放的需求日益迫切,纯电动装载机作为一种电动化的替代方案,具有广阔的市场前景和发展潜力。
在实际应用中,纯电动装载机电驱控制系统面临着一系列技术挑战,如电池寿命管理、动力系统协同控制等。
开展对纯电动装载机电驱控制系统及其控制方法的研究,对推动其技术进步和市场应用具有重要的意义。
关键词:纯电动装载机;电驱控制系统;控制方法引言纯电动装载机作为一种具有环保、低噪音和高效能的工程机械设备,受到了越来越多人的关注和重视。
电驱控制系统是其核心技术之一,对于电动装载机的性能和能效起着至关重要的作用。
对于纯电动装载机电驱控制系统及其控制方法的研究具有重要的理论意义和实际应用价值。
1纯电动装载机电驱控制系统的优势纯电动装载机电驱控制系统的优势主要体现在以下方面:(1)降低使用成本:相比传统燃油驱动装载机,纯电动装载机通过电池供电,减少了燃料消耗。
电驱控制系统具备更为精确和高效的动力分配与管理功能,能够根据实际工作负荷智能调整能量输出,从而提高整机的能源利用率。
电驱控制系统较少使用易损部件,减少了维护和更换成本,提高了装载机的可靠性和使用寿命。
(2)环境友好:纯电动装载机采用电动驱动,不产生尾气排放,减少了空气污染。
相较于燃油驱动的装载机,电驱装载机的噪音污染更低,减少了对周围环境和操作人员的影响。
这符合绿色发展理念,有助于改善工地和建筑现场的运营环境。
(3)提升性能表现:纯电动装载机的电驱控制系统具备更高的输出精确度和灵活性。
通过电动驱动及先进的控制算法,可以实现较快速的加速和动力输出响应,提供更好的操控性和作业效率。
电驱系统还具备能量回收功能,通过制动过程中的能量回收将能量转化为电能储存于电池中,提供额外的动力支持,提升了装载机的牵引力和爬坡能力。
2纯电动装载机电驱控制系统的组成纯电动装载机电驱控制系统的组成包括以下几个主要部分:(1)电机:纯电动装载机使用的电机通常包括主驱电机和辅助电机。
电铲行走装置驱动轮分析报告
驱动轮组件
1 设计要求:
(1)启动瞬时承受200T的启动力。
(2)考虑最大受力情况不屈服。
2 分析零件
该装置中,驱动轮、花键轴和履带板三个零件,其中驱动轮和花键轴是主要的受力零件,因此对这两个零件进行结构分析。
3 分析目的
(1)验证零件在给定的载荷下静强度是否满足要求。
(2)计算安全系数分布。
(3)提出更改建议。
4 分析结果
1.驱动轮
材料:铸造合金钢(正火)。
所得结果包括:
1 静力计算:
(1)应力。
如图1-1所示,由应力云图可知,最大应力为112.6Mpa,静强度设计符合要求。
(2)位移。
如图1-2所示,零件变形导致的最大静位移为1.759e-001mm。
(3)应变。
如图1-3所示,应变云图与应力云图的对应的,二者之间存在一转换关系。
图1-1 应力云图图1-2 位移云图
图1-3 应变云图
5 零件改进
驱动轮零件的安全系数很大,这里通过减小零件的厚度来减小零件的重量。
模型中有很大部分的应力很小,同时考虑零件的结构,如增大圆角,可以更换或去掉部分材料.
对改进后的模型运行静力分析,结果如图1-4所示:最大von Mises为137.8MPa,安全系数约5.8。
图1-4 改进模型应力云图。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
达到 9 %以上 , 5 车速 5k ・ 左右 ; m h 最大牵 引力 2 0 67 0N左右 , 电动轮效率高达 9 . %以上 ; 25 电动 轮能 自适应
差速 , 现整机平稳转 向. 实
关键词 : 轮边驱动 ;永磁同步电机 ;电动轮 ; 载机 装
中 图 分 类 号 : P2 2 T 4 . ; M 2 T 0 ; H 2 3 1 T 9 1 文 献标 识 码 : A 文 章 编 号 :17 —5 8 (00 0 —0 6 —0 6 2 5 12 1 )1 0 2 4
金 晓林 , 来德 , 石 卞永 明
( 同济大学 机械工程学 院, 上海 20 9 ) 0 02
摘要 : 设计并将永磁 同步 电动轮技术 引入 电动装载机轮边驱动行走系统 中. 先在 台架上进行 了永 磁 同步 电动轮
的 特 性 试 验 , 在 载 重 工 况 下 对 电动 装 载 机 进 行 了行 驶 、 引 和转 向等 试 验 . 重 试 验 数据 表 明 电 动 轮 行 驶 效 率 后 牵 载
在 大气 质量 趋于恶 化 、 全球 变暖 和石油 资源 日益 递减 的背景 下 , 为保 护地 球 自然 资源 , 现人 类 的 可 实 持续 发展 , 程机 械 的节能环 保要 求越来 越 高 . 工 由于近几 年混 合驱 动技术 在汽 车行业 中得 到 了长足 的发展 及广 泛 的认 同 , 目前工 程机 械行业 都积极 致 力于混 合 动力 技术 在 工程 机 械上 的应 用 研 究 . 就装 载 机方 面 , 20 0 3年 日立建机 成 功研制 出世 界上 第一 台混合 动力装 载机 _ ; 1 沃尔沃 的混合 动力 L 2 F轮式 装 载机 已于 20
wh e — d i e y t ms o e t i o d r .Fis l el rv n s s e felc rc la e s r ty,a b nc e tng i p i d t b an r l t d p o e te e h t s i sa pl o o t i e a e r p r is. e
De i n a e e r h on w he ldr v n s t m s ofe e t i o e s s nd r s a c g e - i e ys e l c r c l ad r
J N a — i , S id I Xi o l n HILa — e,B AN o g m i g I Y n- n
20 0 8年 3月 问世 L . 2 上述两 种混 合动 力装 载 机 的行 走 驱动 系统都 采 用 集 中驱 动 形式 , ] 即用 电机 驱 动 由变
速 箱 、 动轴 和差 速器 等构 成 的传统底 盘机 构 . 而 , 传 然 在汽 车行 业 中已得 到 应用 的轮边 驱 动技 术 _还 未 见 3 ]
第 8卷第 1期 21 0 0年 3月
中
国
工
程
机
械
学
报
VEJ UR ALO ⅪlS R C I N MA HI R HN S O N F( N T U T O C NE Y
M a .20 0 r 1
电动 装 载 机 轮 边 驱 动 行 走 系 统 设 计 与 研 究
( ol eo ca i l n ier g o gi nv ri ,S ag a 2 0 9 ,C ia C lg f e Meh nc gnei ,T nj U iest hn h i 0 0 2 hn ) aE n y
Ab t a t s r c :Th e h o o y o y c r n u e ma e t ma n t n lc rc wh e s i n r d c d t h e t c n l g f s n h o o s p r n n g e i a d ee t i e l s i t o u e o t e c
Th n,s c s sa rv n e u h t t sd i i g,t a t n a d s e rn r o l t d u d r h a y la i g c n iin .F n l e r c i n t e i g a e c mp e e n e e v ・ d n o d t s i a l o o o y。 i i r v a e r m h e t g d t h tt e d i i g e f in y o l c rc wh e sr a h s9 % a o e wih t s e e ld fo t e t s i a a t a h rv n fi e c fe e t i e l e c e 5 n c b v t
as e do m/ o n 。wh ra t ec e 2 5 % a o ewi h xmu tat nfre o . pe f k h ru d 5 ee si ra h s9 . b v t tema i m rci oc f2 6 t h o
rud o n .Th r i ,t e e e t i e l c n b d p e o t e s e d d fe e c O a o t a y s e rn . e e n h lc rc wh e s a e a a t d t h p e i r n e S s f r s e d t e i g f Ke r s y wo d :wh e - rv n e ma e tma n t t r l c rc wh e ;la e e l ie ;p r n n g e i mo o ;e e t i e l o d r d c