基于量子行为粒子群优化算法的定位技术研究
量子行为粒子群优化算法-中文版

Ii
粒子状态
X = <xi0,xi1,…,xin-1> P = <pi0,pi1,…,pin-1> V = <vi0,vi1,…,vin-1> x_fitness = ? p_fitness = ?
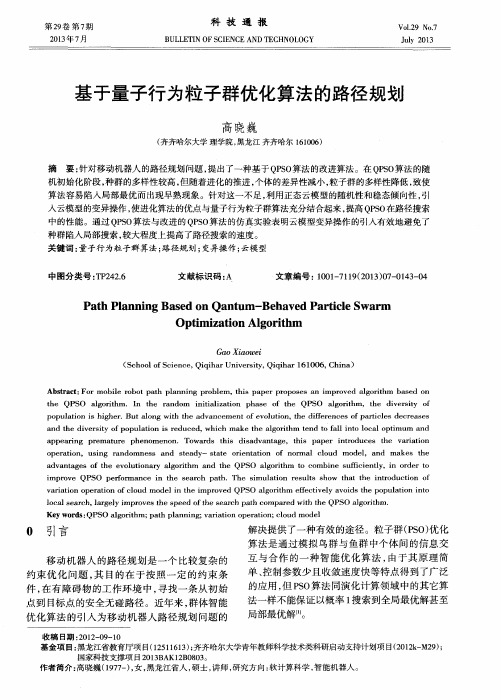
2. 粒子群优化算法的迭代方程 粒子按下列方程进行进化
速度方程
vid(t)=w*vid(t-1)+c1*rand()*(pid-xid(t-1))+c2*rand()*(pgdxid(t-1))
位置方程
xid(t)=xid(t-1)+vid(t)
xid –第i个粒子当前位置的第d维. vid –第i个粒子的当前速度的第d维. Pid –第i个粒子目前最优位置的第d维. Pgd – 群体最优位置的第d维. c1, c2 –加速因子. w - 惯性因子.
被成功的应用到各种优化问题中 在PSO 算法中,包含n个个体的群体在各自的搜索 方向上直接或间接的交互信息
:每个粒子(个体)包含:
3个向量:
• X向量记录了粒子在搜索空间的当前位置 • P向量记录了粒子所找到的当前最优解的位置 • V向量包含了粒子在不受干扰的情况下位置的改变 • X适应值记录了x向量的适应值 • P适应值记录了p向量的适应值
25
20
Pid pbest
15
粒子群优化算法
Vid(t-1) v(k)
图示
v(k+1)
10
Vid(t)
5
Pgd gbest
5
10
15
20
25
3. 粒子群优化算法的群体收搜策略
在粒子群优化算法中,粒子不会消失.
每个粒子被看成是在整个收搜空间收搜并记录最优值的 个体.
高斯量子行为粒子群优化(gqpso)算法

高斯量子行为粒子裙优化(GQPSO)算法是一种基于量子行为的进化优化算法,它结合了粒子裙优化(PSO)算法和量子计算的特点,能够有效地解决复杂优化问题。
本文将从以下几个方面介绍GQPSO算法的原理、特点和应用,希望能够为读者提供深入的了解。
一、GQPSO算法的原理GQPSO算法是基于粒子裙优化算法和量子计算的原理而提出的,它采用了一种全新的粒子编码和演化方式,通过模拟粒子在量子力学中的行为进行搜索和优化。
GQPSO算法的原理如下:1. 量子位表示在GQPSO算法中,每个粒子被表示为一个量子位,根据其在搜索空间中的位置,每个粒子的量子位可以被编码为一个二进制字符串。
这种量子位表示方式能够更好地描述粒子的位置和速度,从而更好地指导搜索过程。
2. 高斯量子演化GQPSO算法通过高斯量子演化来更新粒子的量子位和速度,其中包括量子位的变换和速度的更新。
在高斯量子演化过程中,粒子会受到适应性函数的约束,从而导致不断演化、搜索和优化。
3. 适应性函数GQPSO算法中使用的适应性函数通常是目标函数或者问题的评价函数,它能够帮助粒子判断当前位置的优劣,并指导其向更优的位置演化。
适应性函数的选择对于算法的性能至关重要。
二、GQPSO算法的特点GQPSO算法相比于传统的优化算法有着独特的特点和优势,主要表现在以下几个方面:1. 全局搜索能力强GQPSO算法通过量子位表示和高斯量子演化,能够有效地克服传统算法在全局搜索能力上的不足,更好地发挥粒子裙优化算法的优势,从而在复杂优化问题中取得更好的效果。
2. 收敛速度快GQPSO算法利用了量子行为的特性,能够更快地收敛到全局最优解,从而大大提高了算法的搜索效率和优化能力。
在实际应用中,GQPSO 算法往往能够在较短的时间内找到较优的解。
3. 对高维问题有较好的适应性GQPSO算法对于高维优化问题的适应性较强,能够有效地应对复杂的实际问题,从而满足实际应用的需求。
这一特点使得GQPSO算法在实际工程和科研中有着广泛的应用前景。
量子行为粒子群优化算法研究的开题报告

量子行为粒子群优化算法研究的开题报告一、课题背景近年来,粒子群优化算法(PSO,Particle Swarm Optimization)因其简单易实现、易于应用且具有很高的优化效果等优点,已成为了一种备受关注的优化算法。
而随着量子计算技术的快速发展,量子粒子群优化算法(QPSO,Quantum Particle Swarm Optimization)引起了越来越多的研究兴趣。
与传统的粒子群优化算法不同,QPSO能够利用量子行为的优势,使算法在全局优化问题上的性能得到提高。
因此,本文将研究量子行为粒子群优化算法,并探讨其在优化问题中的应用,从而实现找到全局最优解的效果。
二、研究内容1. 总结和分析粒子群优化算法的原理和应用2. 研究量子计算的基本原理和量子编程技术3. 探讨量子行为粒子群优化算法的基本原理及实现方法4. 实现量子行为粒子群优化算法,并进行模拟试验5. 将算法应用于实际问题中,并比较其性能与其他优化算法三、研究意义与价值对于全局优化问题来说,粒子群优化算法已经取得了较好的效果。
而利用量子行为来提高算法的性能,则是进一步提升全局优化算法效果的研究方向。
因此,探究量子行为粒子群优化算法的实现方法和应用价值,不仅可以深入理解量子计算和粒子群优化算法,还可以提高优化算法在实际问题中的应用效果。
四、研究方法本文将采用文献综述与实验研究相结合的方法,包括以下步骤:1. 阅读相关文献,总结粒子群优化算法的原理和应用,深入了解量子行为及其原理2. 分析量子行为与粒子群优化算法的联系,研究量子行为粒子群优化算法的基本原理及实现方法3. 利用MATLAB或Python等编程语言实现所研究的量子行为粒子群优化算法,并进行实验模拟4. 将所实现的算法应用于实际问题中,比较算法的性能与其他优化算法的效果五、预期成果1. 形成完整的量子行为粒子群优化算法的研究论文2. 实现量子行为粒子群优化算法并进行模拟实验,验证算法的有效性3. 将算法应用于实际问题中,并比较其性能与其他优化算法4. 推进全局优化问题的研究,并提高优化算法在实际问题中的应用效果六、进度安排第一阶段(第1-4周):阅读文献,总结粒子群优化算法的原理和应用,深入了解量子行为及其原理第二阶段(第5-8周):研究量子行为与粒子群优化算法的联系,研究量子行为粒子群优化算法的基本原理及实现方法第三阶段(第9-12周):利用MATLAB或Python等编程语言实现量子行为粒子群优化算法,并进行实验模拟第四阶段(第13-16周):将所实现的算法应用于实际问题中,比较算法的性能与其他优化算法的效果第五阶段(第17-20周):撰写研究报告,完成答辩准备七、参考文献1. Kennedy, J., and Eberhart, R. (1995). Particle swarm optimization. Proceedings of IEEE International Conference on Neural Networks, Perth, Australia, 4, 1942-1948.2. Engelbrecht, A. P. (2005). Fundamentals of Computational Swarm Intelligence. John Wiley & Sons Inc.3. 聂曦,王鹏飞. 基于量子行为的粒子群优化算法研究. 自动化与仪表,2012(6):19-23.4. 周佳微,谷凤玉. 量子粒子群优化算法的研究综述. 计算机工程与科学,2013(1):15-20.5. Shi, Y., and Eberhart. R. (1999). Empirical study of particle swarm optimization. Proceedings of Congress on Evolutionary Computation, Washington, DC, USA, 1945-1950.。
量子行为粒子群优化算法-中文版

量子行为粒子群优化
02
算法的实现过程
初始化阶段
01
02
03
初始化粒子群
在解空间中随机初始化一 组粒子,每个粒子代表一 个潜在的解。
初始化粒子速度
为每个粒子随机分配一个 速度,用于控制其位置的 变化。
初始化粒子位置
根据问题的约束条件和目 标函数,为每个粒子随机 分配一个初始位置。
更新阶段
计算适应度值
量子行为粒子群优化算法的基本原理
• 量子行为粒子群优化算法的基本原理是:每个粒子被视为一 个量子比特,其状态由波函数表示。粒子通过不断更新自己 的位置和速度来搜索解空间,同时通过与其它粒子的信息共 享和协作来不断逼近最优解。在更新过程中,粒子不仅受到 自身经验和群体最佳位置的影响,还受到量子旋转门和量子 测量等量子操作的作用,从而在解空间中实现全局搜索和局 部搜索的平衡。
THANKS.
组合优化问题
组合优化问题是指在一组可行解中寻 找最优解的问题,如旅行商问题、背 包问题、图着色问题等。
量子行为粒子群优化算法能够处理这 类问题,通过粒子间的信息共享和协 作,寻找最优解或近似最优解。
机器学习与数据挖掘
在机器学习和数据挖掘领域,量子行为粒子群优化算法可用 于特征选择、模型参数优化和超参数调整等方面。
算法在实际问题中的应用前景
组合优化问题
量子行为粒子群优化算法在求解组合优化问题方面具有优 势,如旅行商问题、背包问题等,有望在实际生产、物流 等领域得到广泛应用。
机器学习与数据挖掘
量子行为粒子群优化算法可用于特征选择、模型参数优化 等方面,为机器学习和数据挖掘提供新的思路和方法。
控制系统优化
在控制系统的参数优化和控制器设计中,量子行为粒子群 优化算法具有潜在的应用价值,有助于提高控制系统的性 能和稳定性。
基于量子行为粒子群优化算法的电压暂降状态估计

基于量子行为粒子群优化算法的电压暂降状态估计
刘怡君;杨洪耕;王佳兴;王泽
【期刊名称】《电测与仪表》
【年(卷),期】2015(052)019
【摘要】文中提出了一种将传统的故障位置法和状态估计法相结合的电压暂降状态估计新方法. 将仅利用历史故障数据的故障位置法和仅利用现有有限监控数据的状态估计法相结合,得到电压暂降状态方程,并利用量子行为粒子群算法(QPSO)得到优化问题的最优解. 对比遗传算法等传统优化算法,QPSO能保证全局收敛,且控制参数更少,随机性更强,则找寻最优解效率更高. 该方法已在IEEE24标准节点系统上进行仿真计算,并与遗传算法对比,结果验证了本文方法的准确性和可靠性. 此方法适用于任何规模电网发生对称故障和不对称故障时的电压暂降状态估计.
【总页数】6页(P1-6)
【作者】刘怡君;杨洪耕;王佳兴;王泽
【作者单位】四川大学电气信息学院,成都 610065;四川大学电气信息学院,成都610065;四川大学电气信息学院,成都 610065;四川大学电气信息学院,成都610065
【正文语种】中文
【中图分类】TM93
【相关文献】
1.基于TS模糊推理的自适应量子行为粒子群优化算法 [J], 杨莉;张纪会;郑伟博
2.基于量子行为粒子群优化算法的河道糙率反演 [J], 张梦泽;刘远洪;王苓如;王思琪;王文民
3.基于量子行为粒子群优化算法-混沌神经网络的电力系统负荷预测 [J], 王冰山;周步祥;肖贤;林楠
4.基于演化历史信息的自变异协同量子行为粒子群优化算法 [J], 赵吉;傅毅;梅娟
5.基于演化搜索信息的量子行为粒子群优化算法 [J], 赵吉;程成
因版权原因,仅展示原文概要,查看原文内容请购买。
基于量子行为粒子群优化算法的路径规划
v a r i a t i o n o p e r a t i o n o f c l o u d mo d e l i n t h e i mp r o v e d Q P S O a l g o r i t h m e f f e c t i v e l y a v o i d s t h e p o p u l a t i o n i n t o l o c a l s e rc a h , l a r g e l y i mp r o v e s t h e s p e e d o f t h e s e a r c h p a t h c o mp a r e d wi t h t h e QP S O a l g o r i t h m.
t h e QP S O a l g o r i t h m.I n t h e r a n d o m i n i t i a l i z a t i o n p h a s e o f t h e QP S O a l g o r i t h m,t h e d i v e r s i t y o f
i mp r o v e QP S O p e r f o r ma n c e i n t h e s e a r c h p a t h .T h e s i mu l a t i o n r e s u h s s h o w t h a t t h e i n t r o d u c t i o n o f
Op t i mi z a t i o n Al g o r i t h m
Ga o Xi a o we i
( S c h o o l o f S c i e n c e , Qi q i h a r Un i v e r s i t y , Qi q i h a r 1 6 1 0 0 6 , C h i n a , u s i n g r a n d o mn e s s a nd s t e a d y —s t a t e o r i e n t a t i o n o f n o r ma l c l o u d m o de l ,a nd ma k e s t he
粒子群优化算法研究进展
粒子群优化算法研究进展粒子群优化算法(Particle Swarm Optimization,PSO)是一种基于群体智能的优化算法,灵感来自鸟群觅食行为。
粒子群算法最早由Eberhart和Kennedy于1995年提出,并在之后的二十多年间得到广泛应用和研究。
在粒子群优化算法中,解空间被看作是粒子在多维空间中的运动轨迹。
每个粒子代表一个解,通过移动位置来最优解。
粒子根据自身的历史最优解和群体中最优解进行更新,以找到全局最优解。
粒子群算法的研究进展可以从以下几个方面来概括。
首先,对基本粒子群算法的改进。
由于基本粒子群算法存在易陷入局部最优解的问题,研究者提出了一系列的改进方法。
例如,引入惯性权重控制粒子运动的方向和速度,改进了粒子的更新策略;引入自适应策略使粒子能够自适应地调整自身的行为。
其次,对约束优化问题的处理。
在实际应用中,许多优化问题还需要满足一定的约束条件。
针对约束优化问题,研究者提出了多种处理方法,如罚函数法、外罚函数法和修正的粒子群优化算法等,用于保证过程中的可行性。
此外,粒子群算法的应用领域也得到了广泛拓展。
粒子群算法已成功应用于许多领域,如函数优化、神经网络训练、图像分割、机器学习等。
在这些领域的应用中,粒子群算法往往能够找到较好的解,并具有较快的收敛速度。
最后,还有一些衍生算法被提出。
基于粒子群算法的思想,研究者提出了一些衍生算法,如混合算法和改进算法等。
这些算法在解决特定问题或克服粒子群算法的局限性方面具有一定的优势。
总结起来,粒子群优化算法是一种高效、简单而又灵活的优化算法,其研究进展包括对基本算法的改进、对约束优化问题的处理、应用领域的拓展以及衍生算法的提出等。
未来的研究方向可能包括进一步改进算法的性能、提升算法的收敛速度以及应用于更广泛的领域等。
粒子群优化算法及其应用研究【精品文档】(完整版)
摘要在智能领域,大部分问题都可以归结为优化问题。
常用的经典优化算法都对问题有一定的约束条件,如要求优化函数可微等,仿生算法是一种模拟生物智能行为的优化算法,由于其几乎不存在对问题的约束,因此,粒子群优化算法在各种优化问题中得到广泛应用。
本文首先描述了基本粒子群优化算法及其改进算法的基本原理,对比分析粒子群优化算法与其他优化算法的优缺点,并对基本粒子群优化算法参数进行了简要分析。
根据分析结果,研究了一种基于量子的粒子群优化算法。
在标准测试函数的优化上粒子群优化算法与改进算法进行了比较,实验结果表明改进的算法在优化性能明显要优于其它算法。
本文算法应用于支持向量机参数选择的优化问题上也获得了较好的性能。
最后,对本文进行了简单的总结和展望。
关键词:粒子群优化算法最小二乘支持向量机参数优化适应度目录摘要 (I)目录 (II)1.概述 (1)1.1引言 (1)1.2研究背景 (1)1.2.1人工生命计算 (1)1.2.2 群集智能理论 (2)1.3算法比较 (2)1.3.1粒子群算法与遗传算法(GA)比较 (2)1.3.2粒子群算法与蚁群算法(ACO)比较 (3)1.4粒子群优化算法的研究现状 (4)1.4.1理论研究现状 (4)1.4.2应用研究现状 (5)1.5粒子群优化算法的应用 (5)1.5.1神经网络训练 (6)1.5.2函数优化 (6)1.5.3其他应用 (6)1.5.4粒子群优化算法的工程应用概述 (6)2.粒子群优化算法 (8)2.1基本粒子群优化算法 (8)2.1.1基本理论 (8)2.1.2算法流程 (9)2.2标准粒子群优化算法 (10)2.2.1惯性权重 (10)2.2.2压缩因子 (11)2.3算法分析 (12)2.3.1参数分析 (12)2.3.2粒子群优化算法的特点 (14)3.粒子群优化算法的改进 (15)3.1粒子群优化算法存在的问题 (15)3.2粒子群优化算法的改进分析 (15)3.3基于量子粒子群优化(QPSO)算法 (17)3.3.1 QPSO算法的优点 (17)3.3.2 基于MATLAB的仿真 (18)3.4 PSO仿真 (19)3.4.1 标准测试函数 (19)3.4.2 试验参数设置 (20)3.5试验结果与分析 (21)4.粒子群优化算法在支持向量机的参数优化中的应用 (22)4.1支持向量机 (22)4.2最小二乘支持向量机原理 (22)4.3基于粒子群算法的最小二乘支持向量机的参数优化方法 (23)4.4 仿真 (24)4.4.1仿真设定 (24)4.4.2仿真结果 (24)4.4.3结果分析 (25)5.总结与展望 (26)5.1 总结 (26)5.2展望 (26)致谢 (28)参考文献 (29)Abstract (30)附录 (31)PSO程序 (31)LSSVM程序 (35)1.概述1.1引言最优化问题是在满足一定约束条件下,寻找一组参数值,使得系统的某些性能指标达到最大或者最小。
基于量子粒子群优化的WSN节点定位改进
基于量子粒子群优化的WSN节点定位改进
王新芳;张冰;冯友兵
【期刊名称】《计算机科学》
【年(卷),期】2012(039)B06
【摘要】针对无线传感器网络定位低成本、低功耗和高精度的要求,在基于接收信号强度(RSSI)测距的基础上,提出了一种量子粒子群优化(QPSO)的改进加权质心定位算法,即采用QPSO优化WCLA的估计坐标来改善定位误差,并改进收缩扩展系数增强QPSO算法的收敛速度。
仿真表明,改进的算法与WCLA算法和经过粒子群优化的WCLA算法相比,其节点定位精度得到显著提高,且能克服粒子群优化算法的收敛速度慢、易陷入局部极小值的缺点。
【总页数】3页(P129-131)
【作者】王新芳;张冰;冯友兵
【作者单位】江苏科技大学电子信息学院,镇江212003
【正文语种】中文
【中图分类】TP316
【相关文献】
1.基于改进遗传算法PFGA的WSN节点定位优化 [J], 许必宵;张欣慧;徐晶晶;宫婧;孙知信
2.基于拟物力导向的量子粒子群优化算法的WSN节点部署研究 [J], 许国燕
3.基于改进布谷鸟算法的WSN节点定位算法 [J], 王玉芳;毛永毅
4.基于坐标修正的改进WSN节点定位算法 [J], 柏植;许海峰;郭凯;李昊
5.基于坐标修正的改进WSN节点定位算法 [J], 柏植;许海峰;郭凯;李昊
因版权原因,仅展示原文概要,查看原文内容请购买。
优化算法-粒子群优化算法
步骤四:对于粒子的每一维,根据式(1)计算得到一个随机点 的位置。
步骤五:根据式(2)计算粒子的新的位置。
步骤六:判断是否满足终止条件。
粒子群优化算法
PSO算法在组合优化问题中的应用
典型的组合优化问题:TSP
粒子群优化算法
量子行为粒子群优化算法的基本模型
群智能中个体的差异是有限的,不是趋向于无穷大的。群体的聚 集性是由相互学习的特点决定的。
个体的学习有以下特点: 追随性:学习群体中最优的知识
记忆性:受自身经验知识的束缚
创造性:使个体远离现有知识
粒子群优化算法
聚集性在力学中,用粒子的束缚态来描述。产生束缚态的原因是 在粒子运动的中心存在某种吸引势场,为此可以建立一个量子化 的吸引势场来束缚粒子(个体)以使群体具有聚集态。
描述为: 给定n 个城市和两两城市之间的距离, 求一条访问各城市
一次且仅一次的最短路线. TSP 是著名的组合优化问题, 是NP难题, 常被用来验证智能启发式算法的有效性。
vid (t 1) wvid (t) c1r1 pid (t) xid (t) c2r2( pgd (t) xid (t))
xid (t 1) xid (t) vid (t 1)
粒子群优化算法
w 惯性权重 可以是正常数,也可以是以时间为变量的线性或非线性
正数。
粒子群优化算法
通常动态权重可以获得比固定值更好的寻优结果,动态权重可以在 pso搜索过程中呈线性变化,也可以根据pso性能的某个测度函数 而动态改变,目前采用的是shi建议的随时间线性递减权值策略。
粒子群优化算法
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
式() 2 中的 口被称为收缩扩张系数 , 调节它 的值能控制
算法 的收敛速度 。一般而言 , 值在算法运行是从 10线性 .
减小到 0 5时 , 以达到 比较好 的效果 , . 可 目前 大多数 Q S PO
中在一个 中心基点执行 。每个 目标节点通 过至少 3个相邻
锚节点或已经定 位 的节 点之 间 的非精 确测 量距 离进 行定
w ih i rv s te v ii f h rs ne t o . h c mp o e h a dt o e p e e td meh d l y t
Ke rs unu bhvdprc w r pii t n Q S l oi m; a i e w mi p mztn P O) ywod :q atm—eae atl sal ot z i ( P O)a rh prc a t i i ( S ie n m ao g t t ls o i ao l oi m;o lai ; i e no t rs WS s ; ir ue i rt e agrh l ai t n wrl s esr e ok( N ) ds b t ea v t c z o ess nw t i dt i
算法 的实 际应用 中都采 用这 种参数控 制方式 , 当然 的初
值或终值可略有不 同。 QS P O的算法流程为 1 置 t O 在 问题空 间中初始化粒子群 中粒子的位置 ; ) = , 2 根据式 ( ) ) 3 计算粒子群 的平均最优位置 ; 3 计算粒子的当前适应 值 , 与前 一次 迭代 的适 应值 ) 并
度 , 明该 方 法 的有 效 性 。 证
关键词 :量子行 为粒 子群优化算法 ; 粒子群优 化算 法 ; 定位 ; 无线传感器 网络 ;分布迭代式
中图分类号 :T 3 3 P 9 文献标识码 :A 文章编 号 :1 0- 77 2 1 )5 05 - 4 0 09 8 (0 2 0 -0 80 -
位 。本文 提 出了分布式 迭代定位 方法 , 并将 Q S P O算法应 用于 WS s N 分布式的节点定位研 究 中, 以提高定位精 度 , 减
小定位成本 。 1 QP O 算法 S
P O算法 是一种基 于种群 的进化搜索技术 。在 P O S S
算法 中, 子的运动状态 由位置和速度描述 , 粒 随着时 间的演 化 , 子的运动 轨迹是 既定 的; 粒 同时粒 子 的速 度受 到 一定
0 引 言
法都有一个共 同的特点 , 它们 利用具有绝 对位置 经验 的一 组传感器 ( 信标 或锚节点 ) 来估计未 知位置 的传感 器 ( 目标 节点 ) 。因此 , N 定位技 术可 分为 2个 阶段 : ) WS s 1 测距 阶段 (a g gp ae , r i hs) 算法 确定 目标 节点 和邻 近锚节 点 之 nn
2 De a t n fElc r n c I f r t n En i e rn W u iCi l g f Vo a i n lTe h o o y, . p r me to e t o i n o ma i gn e i g, x t Co l e o c to a c n l g o y e
比较 , 如果当前适应值 小于前一 次迭代 的适应值 , 根据粒 则 子 的位置更新 为粒 子当前 的位 置 , 即如果
P () , 4 t 1 ( +1 t ] 贝 ( + )= ft ); P 4 对于每个粒子 , ) 全局 最好位 置 G() t 的适应值 进行 比较 , 若优于 G t 的适应值 , 将其作 为 当前 的全局 最好 () 则 位置 ; 否则 , () G t不变 ; 5 对粒子 的每 一维 , ) 根据 式 ( ) 算得 到一 个 随机点 1计
WS s N 定位被视 为一个 多维优化 问题 , 近年来已提出利 用群体智能算法 的解决 方法 。文献 [ ] WS s 3对 N 节点 定位 研究进行 了综述 。文献 [ ]在 D — o 4 V H p基 础上提 出了一种
于各 自的 P点 , P=( P , ,Ⅳ , i 粒子 P点 的第 P , … P ) 第 个
涉及监 测 、 跟踪和地 理路 由应用方 面。这些 WS s N 定位算
收 稿 日期 :0 1o _ 6 2 1 _9 2 基 金 项 目: 苏 省 博 士 后 基 金资 助 项 目 (1 12 C 江 1 0 14 )
第 5期
赵
吉, : 等 基于量子行为粒子群优化算法的定位技术研 究
5 9
Wu i 1 0 0 C ia x 2 4 0 . hn )
A s at iig a te pol fnd oa zt n i wrl ssno e ok ( N ) t ir ue b t c:Am n t h rb m o oe l la o n i e e srnt rs WS s ,h dsi t r e ci i es w e tb d
法提出了一种 2个 阶段 的集 中定 位方法 , 而解决 了定位 从
其 中
) 薹i = P j ㈩
置 的平均值 , 作为计算粒子下一迭代步的变量 。
( 3 )
在QS P O算法 中 c( ) t 定义 为所有 粒子 的局部 最优 位
过程中位置翻转的问题 。
因为 WS s N 的复杂性 和可扩展性 问题 要求定 位算法是 分布式算法 , 这样算法 就能在 每一个 传感 器节点 而不是集
adte unu bhvdprces am o t i tnagrh Q S n atm-eae atl w r pi z i oi m( P O)w i a uc ovrec blyi hq i m ao l t hc hsq i cne n eait s h k g i ue rsltn. h iua o sh r cm a dwt eprc w r pi zt n P O)a oi m, sdf o i sT es linr u sae o pr i t at l sam ot ai ( S o uo m t e e hh ie mi o l rh i g t t so s ht P O a oi m ote o s h S l rh n poete oe oaztnpeio f ci l, hw a Q S grh upr r eP O a oi m adi rv d c i i rc ineet e t l t fm t g t m h n l l ao s f vy
i r t e l c l ain meh d r s a c f S e c b d On e te n d sg t o aie t e c sr fr n e r t ai o a i t to e e r h o Nsi d s r e . c o e e c l d,h y a t ee e c sf e v z o W s i h l z a o
t e r s fn de . e rngn — s d lc lz to o lm sf r u ae s a mu t・ i n in lo i z to s u h e to o s Th a ig ba e o a ia in pr be i om lt d a lid me so a ptmiain is e,
置} 形式 , 从而 为许 多新 型应用 如基 于位置 的路 由、 跟踪 、 建 筑物形变测量等打开 了途径 。
传感器节点位置 的定位 可 以使用 几何方 法完成 , 对非 线性方程组求解 出精确的位置点 ; 或者使用最优化方法 , 减
小定位 目标节点坐标 的误差。
近几年 , 提出了一些传感器节点定位 的算法 , 特别是在
维坐标为
Pi ( = ・ f +[ 一 ) () P () 1 () G(). £]‘ J j
,
() 1
基于粒子 群优化 ( S 的传感器 网络定 位算法从而 实现节 P O)
点的定位 。文 献 [ ] 出了基于 P O算法 的 WS s 5提 S N 节点集 中式定位研究 。通过 实验显示 , 方法相 比前 期研究 中提 该 出的模拟退火算法 具 有更准 确 的定 位性 能。同时 , 该方 法需 要具备 多个锚节点才能对所有 目标节 点进行定位 。文
Re e r h 0 o a i a i n t c no o y ba e n q n u - h v d s a c n l c l to e h l g s d 0 ua t m be a e z
Dar…c W ar t l S i e m Oot i ・on ● 』m ● i i ● zat ● al 20r●nm l■ t ; J I c
5 8
传感器 与微 系统 ( rndcr n coytm T cnlg s Tasue dMi ss ehooi ) a r e e
21 0 2年 第 3 1卷 第 5期
基 于 量 子行 为 粒 子 群 优 化 算 法 的定 位 技 术研 究
赵 吉 , 志成 纪
( . 南 大 学 电气 自动 化研 究所 , 苏 无 锡 2 42 ; 1江 江 1 12 2 无 锡 城 市 职 业 技 术 学 院 电子 信 息 工 程 系 , 苏 无 锡 2 4 0 ) . 江 10 0
无线传感器 网络 ( i l s esr e ok , N ) wr e no t rsWS s 是一 ess nw 种 由分 布式 自主节点组 成 , 过节点 间相互协作感 知环境 通 的 网络 。节 点定 位 技术 属 于 WS s 用 支 撑技 术 , N 应 在 WS s 系中占有重要地位。对 于大多数 的 WS s N体 N 应用 , 不 知道节 点位置而感知 的数据是 没有意义 的 , 置信息 的引 位
Z HAO J ,.J h.h n i _ IZ ic e g ( .ntueo l ti l uo t n Ja g a nvri , x 1 12, hn ; 1I stt f e r a tmai ,in n n U i s y Wu i 4 2 C ia i E c c A o e t 2