现代控制理论作业
现代控制理论大作业
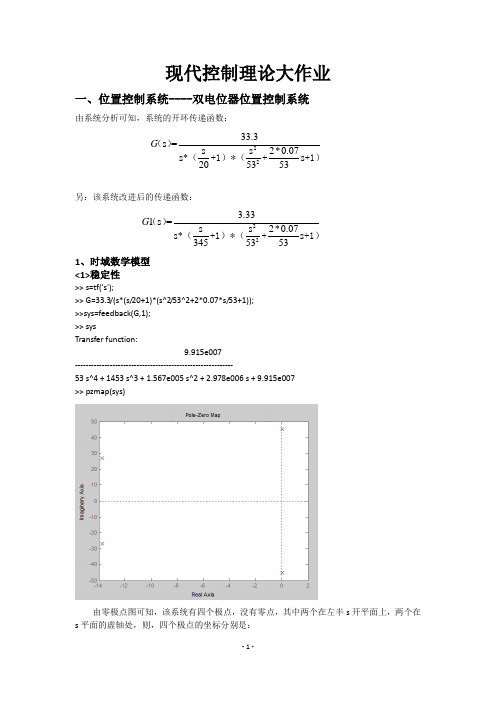
现代控制理论大作业一、位置控制系统----双电位器位置控制系统由系统分析可知,系统的开环传递函数:2233.3s =s s 2*0.07s*s 205353G()(+1)*(++1)另:该系统改进后的传递函数:223.331s =s s 2*0.07s*s 3455353G ()(+1)*(++1)1、时域数学模型<1>稳定性>> s=tf('s');>> G=33.3/(s*(s/20+1)*(s^2/53^2+2*0.07*s/53+1)); >>sys=feedback(G,1); >> sysTransfer function:9.915e007 -----------------------------------------------------------53 s^4 + 1453 s^3 + 1.567e005 s^2 + 2.978e006 s + 9.915e007>> pzmap(sys)由零极点图可知,该系统有四个极点,没有零点,其中两个在左半s 开平面上,两个在s 平面的虚轴处,则,四个极点的坐标分别是:>> p=pole(sys)p =0.0453 +45.2232i0.0453 -45.2232i-13.7553 +26.9359i-13.7553 -26.9359i系统的特征方程有的根中有两个处于s的右半平面,系统处于不稳定状态<2>稳态误差分析稳态误差分析只对稳定的系统有意义,系统(G)处于不稳定状态,所以不做分析。
改进后系统(G1)如下,求其特征方程的极点:>> s=tf('s');>> G1=3.33/(s*(s/345+1)*(s^2/53^2+2*0.07*s/53+1));>> sys2=feedback(G1,1);>>p=pole(sys2);p =1.0e+002 *-3.4492-0.0206 + 0.5258i-0.0206 - 0.5258i-0.0338可以看出,改进后的传递函数G1的四个极点都在s平面的右半开平面上,则系统G1是稳定的,故对此系统做稳态误差分析:由系统G1的开环传递函数在原点处有一个极点,故属于1型系统。
现代控制理论大作业

现代控制理论直流电动机模型的分析姓名:李志鑫班级:测控1003学号:20100203030921直流电动机的介绍1.1研究的意义直流电机是现今工业上应用最广的电机之一,直流电机具有良好的调速特性、较大的启动转矩、功率大及响应快等优点。
在伺服系统中应用的直流电机称为直流伺服电机,小功率的直流伺服电机往往应用在磁盘驱动器的驱动及打印机等计算机相关的设备中,大功率的伺服电机则往往应用在工业机器人系统和CNC铣床等大型工具上。
[1]1.2直流电动机的基本结构直流电动机具有良好的启动、制动和调速特性,可以方便地在宽范围内实现无级调速,故多采用在对电动机的调速性能要求较高的生产设备中。
直流伺服电机的电枢控制:直流伺服电机一般包含3个组成部分:-图1.1①磁极:电机的定子部分,由磁极N—S级组成,可以是永久磁铁(此类称为永磁式直流伺服电机),也可以是绕在磁极上的激励线圈构成。
②电枢:电机的转子部分,为表面上绕有线圈的圆形铁芯,线圈与换向片焊接在一起。
③电刷:电机定子的一部分,当电枢转动时,电刷交替地与换向片接触在一起。
直流电动机的启动电动机从静止状态过渡到稳速的过程叫启动过程。
电机的启动性能有以下几点要求:1)启动时电磁转矩要大,以利于克服启动时的阻转矩。
2)启动时电枢电流要尽可能的小。
3)电动机有较小的转动惯量和在加速过程中保持足够大的电磁转矩,以利于缩短启动时间。
直流电动机调速可以有:(1)改变电枢电源电压;(2)在电枢回路中串调节电阻;(3)改变磁通,即改变励磁回路的调节电阻Rf以改变励磁电流。
本文章所介绍的直流伺服电机,其中励磁电流保持常数,而有电枢电流进行控制。
这种利用电枢电流对直流伺服电机的输出速度的控制称为直流伺服电机的电枢控制。
如图1.2Bm电枢线路图1.2——定义为电枢电压(伏特)。
——定义为电枢电流(安培)。
——定义为电枢电阻(欧姆)。
——定义为电枢电感(亨利)。
——定义为反电动势(伏特)。
现代控制理论大作业7页
现代控制理论大作业老师:周晓敏姓名:李维奇班级:机研141班学号:s2*******2019年1月一.系统的工程背景及物理描述超精密机床是实现超精密加工的关键设备,而环境振动又是影响超精密加工精度的重要因素。
为了充分隔离基础振动对超精密机床的影响,目前国内外均采用空气弹簧作为隔振元件,并取得了一定的效果,但是这属于被动隔振,这类隔振系统的固有频率一般在2Hz 左右。
上图表示了亚微米超精密车床隔振控制系统的结构原理,其中被动隔振元件为空气弹簧,主动隔振元件为采用状态反馈控制策略的电磁作动器。
上图表示一个单自由度振动系统,空气弹簧具有一般弹性支承的低通滤波特性,其主要作用是隔离较高频率的基础振动,并支承机床系统;主动隔振系统具有高通滤波特性,其主要作用是有效地隔离较低频率的基础振动。
主、被动隔振系统相结合可有效地隔离整个频率范围内的振动。
床身质量的运动方程为:p F ——空气弹簧所产生的被动控制力a F ——作动器所产生的主动控制力假设空气弹簧内为绝热过程,则被动控制力可以表示为:电磁作动器的主动控制力与电枢电流、磁场的磁通量密度及永久磁铁和电磁铁之间的间隙面积有关,这一关系具有强非线性。
由于系统工作在微振动状况,且在低于作动器截止频率的低频范围内,因此主动控制力可近似线性化地表示为:其中,电枢电流Ia 满足微分方程: 1.性能指标:闭环系统单位阶跃响应的:超调量不大于5%;过渡过程时间不大于0.5秒(∆=0.02)2.实际给定参数:某一车床的已知参数3.开环系统状态空间数学模型的推导过程:对式0y s s =-两边求二次导,.....011()({1[/()]})n p a r r r e e e a y s F F c y k y p V V A y A k I m m ==-+=-++-++对上式再求一次导,其中1/()r r r e e p V V A y A η⎧⎫''⎡⎤=-+⎨⎬⎣⎦⎩⎭则,又由,代入 00(,)()a e emy cy k y my cy k y L R E I y u t k k ηη++++++--+=,即 令状态变量为 , 得系统开环的状态方程为:1223003123e x x x x Rk Lk Rc k Lc Rm x x x x u Lm Lm Lm Lm ⎧⎪=⎪=⎨⎪++⎪=----⎩于是状态空间表达式为:[]1122003312301000010100e x x x x u Rk Lk Rc x k Lc Rm x Lm Lm Lm Lm x y x x ⎧⎡⎤⎡⎤⎪⎢⎥⎢⎥⎡⎤⎡⎤⎪⎢⎥⎢⎥⎢⎥⎢⎥=+⎪⎢⎥⎢⎥⎢⎥⎢⎥⎪⎢⎥⎢⎥⎢⎥⎢⎥++⎪⎣⎦⎣⎦----⎢⎥⎢⎥⎨⎣⎦⎣⎦⎪⎪⎡⎤⎪⎢⎥=⎪⎢⎥⎪⎢⎥⎣⎦⎩代入系统参数,二、系统的定性分析系统的能控能观性根据其能控性矩阵和能观性矩阵是否满秩来判断。
现代控制理论习题及答案
现代控制理论习题及答案现代控制理论习题及答案现代控制理论是控制工程领域的重要分支,它研究如何设计和分析控制系统,以实现对动态系统的稳定性、响应速度、精度等方面的要求。
在学习现代控制理论过程中,习题是一个非常重要的环节,通过解答习题可以帮助我们巩固理论知识,提高问题解决能力。
本文将介绍一些常见的现代控制理论习题及其答案,希望对读者有所帮助。
1. 题目:给定一个开环传递函数 G(s) = 10/(s+5),求其闭环传递函数 T(s) 和稳定性判断。
解答:闭环传递函数 T(s) 可以通过公式 T(s) = G(s) / (1 + G(s)) 计算得到。
代入G(s) 的表达式,得到 T(s) = 10/(s+15)。
稳定性判断可以通过判断开环传递函数G(s) 的极点是否在左半平面来进行。
由于 G(s) 的极点为 -5,位于左半平面,因此系统是稳定的。
2. 题目:给定一个系统的状态空间表达式为 dx/dt = Ax + Bu,其中 A = [[-1, 2], [0, -3]],B = [[1], [1]],求系统的传递函数表达式。
解答:系统的传递函数表达式可以通过状态空间表达式进行求解。
首先,计算系统的特征值,即矩阵 A 的特征值。
通过求解 det(sI - A) = 0,可以得到系统的特征值为 -1 和 -3。
然后,将特征值代入传递函数表达式的分母,得到传递函数的分母为 (s+1)(s+3)。
接下来,计算传递函数的分子,可以通过求解 C = D(sI - A)^(-1)B 得到,其中 C 和 D 分别为输出矩阵和输入矩阵。
代入给定的 A、B 矩阵,计算得到 C = [1, 0] 和 D = [0]。
因此,系统的传递函数表达式为 G(s) = C(sI - A)^(-1)B = [1, 0] * [(s+1)^(-1), -2(s+3)^(-1); 0, (s+3)^(-1)] * [1; 1] =(s+1)^(-1) + 2(s+3)^(-1)。
现代控制理论大作业
2019/11/21
2
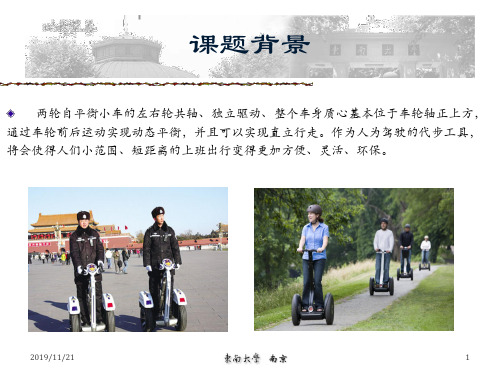
课题背景
系统工作原理
Accelerometer gyroscope 遥控器
电源
左轮 软件编码
AD 采样
滤波
MCU
驱动器1 驱动器2
无线模块
软件编码 右轮
减速机构 左电机
右电机 减速机构
2019/11/21
3
系统工作原理 前进(后仰)
后退(前倾)
2019/11/21
课题背景
后退(纠正后仰) 前进(纠正前倾)
Matlab计算程序:
pole=[-1,-2,-3,-4]; K=place(A,B,pole) A1=A-B*K; pole=[-3,-4,-5,-6]; K=place(A,B,pole) A2=A-B*K; pole=[-8,-9,-10,-11]; K=place(A,B,pole) A3=A-B*K;
figure; hold on; plot(curve1(:,2),'color','blue'); plot(curve2(:,2),'color','red'); plot(curve3(:,2),'color','green'); xlabel(‘时间(s)'); ylabel(‘摆动角度(rad)'); hold off
2019/11/21
N C,CA,CA2 ,CA3
计算结果:
rankc = 4 ranko = 4
结论: k(M)=4 系统完全能控 Rank(N)=4 系统完全能观
稳定性分析
运用Matlab解出矩阵A的特征值如下:
《现代控制理论》第三版_.习题答案
1 0 0 3 1 0 5 2 1 52 7 1 5 2 70 125 3 5 7 5 0 0 1 1 B 2 ; 2 5 5
1 0 a1 0 0 1 0 1 0 0 1 a2 3 7 5
0 B 0 1
C (b0 a0bn ) (bn1 an1bn ) 2 1 0
3 1 a 或者 2 2 1 a1 0 a0
e At I At 1 22 1 33 A t A t 2! 3! t2 t4 t6 t3 t5 1 4 16 64 , 4 16 t 2! 4! 6! 3! 5! 3 5 2 4 6 t t t t t t 4 16 64 , 1 4 16 64 3! 5! 2! 4! 6!
0 0 1 B M 1 0 0 0 0 1 M2
1 0 B 1 M1 B1 M2
1 B1 M1 B1 B2 M2
0
0 0 1 0 C 0 0 0 1
1-5. 根据微分方程, 写状态方程, 画模 拟结构图。
1 a2 a2 2 a1 3 2 a a a 1 2 2 a0
1 a2 a1
1 a2
12 b1 b0
b3 b 2 b1 1 b0
凯莱哈密顿法: 1,2 2 j
0 (t ) 1 1 e1t 1 2(e 2 jt e 2 jt ) (t ) 1 2t 4 2 jt 2 jt e j ( e e ) 2 1
现代控制理论作业题.
⎡− a
0 ⎤ ⎡0⎤
⎢
(2)
x&
=
⎢ ⎢
−b −c
⎥ ⎥
x
+
⎢⎢0⎥⎥u,
y = [1
0
0
0]x。
⎥ ⎢1⎥
⎢ ⎣
0
−
d
⎥ ⎦
⎢⎣1⎥⎦
2.17 试判断下列系统的可观测性:
⎡−1 − 2 − 2⎤ ⎡2⎤
(1)
x&
=
⎢ ⎢
0
−1
1
⎥ ⎥
x
+
⎢⎢0⎥⎥u,
y = [1 1
0]x
⎢⎣ 1 0 −1⎥⎦ ⎢⎣1⎥⎦
4
⎥ ⎦
x
+
⎡1⎤ ⎢⎣1⎥⎦u
Y (s) = s +1 U (s) s 2 + 3s + 2
试写出系统可控不可观测、可观测不可控、不可控不可观测的动态方程。 2.21 设被控系统状态方程为
⎡0 1 0 ⎤ ⎡ 0 ⎤
x& = ⎢⎢0
−1
1
⎥ ⎥
x
+
⎢ ⎢
0
⎥⎥u
⎢⎣0 −1 10⎥⎦ ⎢⎣10⎥⎦
⎡1 2 0⎤
⎡0⎤
A = ⎢⎢3 −1 1⎥⎥, b = ⎢⎢0⎥⎥, c = [−1 1 1]
⎢⎣0 2 0⎥⎦
⎢⎣1⎥⎦
试检查可观测性,设计(n-q)维观测器,并使所有极点配置在 -4。 2.25 试用李雅普诺夫第二法判断下列线性系统平衡状态的稳定性:
(1) x&1 = −x1 + x2 , x&2 = 2x1 − 3x2 (2) x&1 = x2 , x&2 = 2x1 − x2
现代控制理论仿真作业
现代控制理论仿真作业给定系统[]01000010,1000231x x u y x ⎡⎤⎡⎤⎢⎥⎢⎥=+=⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦1. 计算原系统的零极点>> sys=ss(A,B,C,D)a =x1 x2 x3x1 0 1 0x2 0 0 1x3 0 -2 -3b =u1x1 0x2 0x3 1c =x1 x2 x3y1 1 0 0d =u1y1 0Continuous-time model.>> ss=zpk(sys)Zero/pole/gain:1-------------s (s+1) (s+2)故原系统的极点为s1=0,s2=-1,s3=-2.>> g=tf(ss)Transfer function:1-----------------s^3 + 3 s^2 + 2 s>> rlocus(g) %绘制根轨迹%>> [x,y]=ginput(3);p=x+i*yk=rlocfind(g,p)p =-0.4221 - 0.0000i-0.0005 + 1.3926i-0.0005 - 1.3926ik =0.3849 5.8171 5.8171当增益0<k<0.3849时,系统根轨迹位于实轴负半轴,当k>5.8171时,系统根轨迹有位于右半平面的部分。
当k=1时,系统有一个特征根位于实轴负半轴,还有一对位于左半平面的对称复根。
2. 观察原系统的状态响应和输出响应利用MATLAB SIMULINK工具箱搭建原系统仿真模型仿真结果x1 x2x3 y 3. 判断系统能观能控性>> A=[0 1 0 ; 0 0 1; 0 -2 -3];B=[0; 0; 1];C=[1 0 0];D=[0];>> N=size(A) %A 矩阵的型号%N =3 3>> n=N(1) %A矩阵的行数%n =3>> cam=ctrb(A,B) %能控矩阵%cam =0 0 10 1 -31 -3 7>> ob=obsv(A,C) %能观矩阵%ob =1 0 00 1 00 0 1>> if rank(cam)==n %判断能控性%disp('系统可控')elsedisp('系统不可控')end系统可控>> if rank(ob)==n %判断能观性%disp('系统可观')elsedisp('系统不可观')end系统可观由以上分析可知,该系统为能控能观矩阵,故可以通过状态反馈任意配置极点,也可用全维观测器对原状态进行估计。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
现代控制理论在电气工程中的应用---------电能质量的控制徐彪(中国矿业大学信息与电气工程学院,江苏徐州221008)摘要:随着现代控制理论和电力电子技术的快速发展,现代控制理论的各种控制方法在电能质量控制中得到了广泛的应用,尤其是用于消除电网谐波的有源滤波器(APF)。
本文我们拿常用的并联型有源滤波器为例子,详细论述了自适应控制、变结构控制、反馈线性化解耦控制、鲁棒控制、无源性控制以及重复控制在并联型有源滤波器中的应用,比较了了各种控制算法的优点及不足。
针对有源滤波器含有较多不确定因素及其补偿对象复杂多变的特点,提出应用鲁棒性较好,对模型依赖性不强的控制方法和将不同的控制策略相互结合,充分发挥各种控制策略优越性的解决思路。
关键词:现代控制理论;有源滤波器;谐波Abstract: With modern control theory and the rapid development of power electronics technology, modern control theory, various control methods in power quality control has been widely applied, especially for the elimination of active harmonic filters (APF) . In this paper we take the commonly used shunt active filter as an example, discusses in detail the adaptive control, variable structure control, feedback linearization decoupling control, robust control, passive control and repetitive control of shunt active filter in Application, compare the various advantages and disadvantages of the control algorithm. For the active filter compensation with many factors of uncertainty and the characteristics of complex objects, proposes the application is robust, the model dependence is not strong control methods and the different control strategies combinedwith each other, give full play to the Kinds of control strategies to solve the superiority of ideas. Key words: modern control theory; active filter; harmonics引言电能是现代文明的物质基础之一,随着各种非线性负载(如电力电子器件、电弧炉等)的使用造成的谐波污染和无功需求量得增加不仅导致功率因数偏低,也会降低系统的效率,产生电压波形畸变,增加输配电线路的线损和造成对周边通信线路的干扰[1]。
因此,消除谐波的污染以及补偿系统的无功缺额成为电能质量控制研究中的热点问题之一。
传统的解决方法是采用无源滤波器(PF)进行滤波和提高功率因数。
但是PF的滤波特性固定,且易与线路阻抗发生串/并联谐振等缺点,限制了它的广泛应用。
近年来,有源滤波器(APF)已经成为消除谐波、补偿负序、无功电流的有效手段,在低压电网中应经有相应的产品出现。
与PF相比,APF变得比PF更有效,更有商业价值,它具有以下优点:能够抑制很宽的谐波频率带、不会对网络产生额外的谐波频率。
根据APF接入电网的方式,将其系统构成分为两大类,即并联型APF和串联型APF。
并联型APF主要用来补偿系统的谐波和无功电流,而串联型APF则用来抑制系统的谐波电压。
目前,电力系统中的谐波源大多数为谐波电流源,它们在运行过程中产生大量的谐波电流,因此研制并联型APF直接对系统的谐波和无功电流进行补偿是一种行之有效的方法,也是目前研究的重点。
并联型APF系统的基本结构主要由补偿电流信号产生电路(指令电流运算电路)和补偿发生电路(包括直流跟踪控制电路、PWM逆变器驱动电路和主电路)两部分组成。
它的基本工作原理是检测补偿对象的电流和电压,经过指令电流运算电路得出补偿电流的指令信号。
该信号经补偿补偿电流发生电路放大,得出补偿电流。
补偿电流与负载中的谐波、无功及负序电流抵消,最终得到期望的系统电流,因此,APF系统的控制可以被看作是一个典型的跟踪控制问题。
由于获得的指令电流信号是一个时变而且具有多次谐波的复杂信号,所以电流跟踪控制策略是决定APF稳态和动态性能的一个关键因素。
此外,由于PWM逆变器是一个强非线性系统,其电感、电容以及IGBT的各种参数具有分散性,同时其中还存在PWM 驱动电路等无法进行准确数学建模的部分,在运行中由于由于杂散电感等不确定因素的影响,使在实际中PWM逆变器的工作特性更难以达到理想化,这一切都给APF系统控制策略的设计增加了难度[2]。
近30年来,随着电力电子技术和微型计算机的不断进步,各种先进的控制技术被应用于APF的控制过程中,在各种国际会议、学术期刊上发表了一些论文,取得了一批有价值的研究成果。
这些先进的控制方法为综合解决APF系统信号跟踪、干扰抑制以及参数摄动这三个主要问题提供了新的思路。
本文将综述这些现代控制方法的基本原理及其在APF中应用的优缺点,对现代控制技术在APF系统中的应用前景作了展望。
下面详细介绍多种现代控制技术在有源滤波器中的应用:1自适应控制在APF中的应用自适应控制的目标使控制系统对参数的变化,以及对未建模部分的动态过程不敏感。
当过程动态变化时,自适应系统试图感受这一变化并实时的调节控制器的参数或控制策略。
自适应控制系统主要有两类,而模型参考自适应系统(MRAC)和自校正控制系统(STR)。
在APF的跟踪控制中,STR应用较为广泛,文献[基于PID控制和重复控制的正弦波逆变电源研究]中为了减小电流的跟踪误差,在电流指令信号后加一个自适应滤波器APF,并利用自校正控制中的最小方差算法,在线调整滤波参数,使输入和输出的误差最小,但是这种方法使软件的工作量增大,影响APF工作的实时性,还有的文献提到将STR和PI控制器联合使用,构成自校正PI控制,在线调整P、I的值,改善APF的补偿性能,实现对VSC直流侧电容电压的稳定控制。
总之,自适应控制能够应付缓慢变化的结构性干扰和参数摄动所引起的动态品质的恶化,但是难以抑制非结构性干扰对控制效果的影响;在某些情形下,自适应控制率的收敛速度也难以控制。
2滑模变结构控制在APF中的应用滑模控制(SMC)的本质是一种开关性控制,他要求频繁、快速的切换系统的控制状态,由于APF中有开关器件的存在,其本身就是一个变结构的系统,所以引入SMC到APF控制中有其本质上的互通性,因此滑模结构控制在确定APF的开关模式,改善电流闭环跟踪控制性能和提高系统的鲁棒性都有比较好的应用。
但是SMC本身也存在一些缺陷,如高频抖振,这可能导致逆变器的开关频率变化过大,开关毛刺的频率分布范围较广,补偿后电源电流含有较大的高次谐波,而且谐波电流频谱随即分布,不易进行滤波,给APF在工程实际中的应用带来困难。
为了克服抖振对补偿效果的影响,准滑动模态滑模控制和基于趋近律滑模控制相继被采用。
准滑动模态滑模控制的基本思想是采用饱和函数来代替切换函数,即在边界层之外采用正常滑模控制,在边界层内为连续状态的反馈控制;基于趋近律滑模控制通过调整趋近律的相关参数,既可以保证滑动模态到达过程的动态品质,又可以减弱控制信号的抖振,改善APF的补偿效果[3]。
3反馈线性化解耦在APF中的应用微积分理论引入非线性系统研究,使非线性系统的控制得到了突破性的进展,而且提供了系统的结构化的设计方法。
对于耦合多变量非线性系统,在实现线性化的同时,还能实现解耦。
反馈线性化解耦在APF中的应用主要体现在电流跟踪控制方面。
由于APF是一个多输入多输出的非线性系统,而且存在强耦合作用:三相电流以及直流侧电压都存在耦合关系,而且由于三相逆变桥的开关器件,所以系统具有本质非线性。
利用反馈线性化方法能够实现APF的解耦、精确线性化和非线性综合,获得PWM的调制信号电流的给定信号。
反馈线性化方法存在可处理的非线性系统类别比较局限和计算复杂的缺陷,是基于非线性的精确对消,要求全部状态可观以及参数可知。
然而在实际中的物理模型是受不确定因素影响而变化的,常常不能精确知道,同时该方法不能保证系统的全局稳定性,所以还必须从控制系统的鲁棒性和稳定性出发,进一步研究该问题。
4鲁棒控制在APF 中的应用鲁棒控制不仅具有处理多变量问题的能力,还可以解决具有建模误差、参数不确定和干扰未知系统的控制问题,并直接解决鲁棒稳定性问题,具有较好的直观性及严格的数学基础。
在鲁棒控制的应用中,目前主要是线性系统及仿射非线性系统[4]。
鲁棒控制在电力电子学中的应用刚刚开始。
在APF中的应用,据相关资料所知,目前这方面的研究成果还很少。
这主要是由于鲁棒控制器中权函数的选取比较复杂,需要考虑模型摄动和动态摄动。
但是还应看到设计好的鲁棒控制器经较简单的运算便可使系统具有良好的性能,因此具有较好的实时性。
此外,最近几年鲁棒控制又取得了新的发展,特别是引入u综合以及采用自适应控制对鲁棒控制进行修正,去得了较好的效果并简化了权函数的选择过程。
由于APF的数学模型中包含不确定因素,而鲁棒控制适用于存在建模误差和未建模部分的系统,因此利用鲁棒控制原理设计APF控制系统具有良好的应用前景。
5无源性控制在APF中的应用无源性理论是一种能量“整形”方法,通过重新分配系统的能量和注入非线性阻尼,使系统在满足无源性的条件下达到要求的性能。
这种方法从系统结构和能量的角度出发,避免了反馈性控制中的坐标变换和非线性反馈,使控制器的设计得到一定的简化,在确保闭环系统稳定的同时提高了系统的鲁棒性。
APF作为电力电子装置的一种,本身就具有电力电子线路的无源性特点。
因此,无源性控制在APF电流跟踪控制中的应用有其得天独厚的条件。
目前,利用无源性理论获得APF 的调制信号主要是基于APF系统的平均化模型,将系统的开关函数用一个连续变量Y表示的开关占空比等效表示,而后即可获得形式比较简单,跟踪精度较高,在线执行方便的无源性控制律。