双目立体视觉的光学标定技术
基于双目立体视觉偏折术的标定

光 学三 维测 量技 术 以其非 接触 、 精度 高 、 速度快 等 的 优 点在 航 空航 天 、 汽 车 制造 业 、 反 向工 程 、 计 算 机 辅 助 设
计、 计算机辅助制造等领域取得 了广泛的应用 , 但其测量 对象 主要 是漫 反射 物体 。然 而 , 工业 生 产 中有 大 量镜 面 、 类镜面等高反射物体需要测量 , 如光学元件中的平面镜、 凸面镜 和 凹面镜等 , 因此 近年 来对 镜 面 、 类镜 面 等高 反射 物体三维形貌测量的需求越来越多。传统的接触式测量 虽然 能够 对镜 面 、 类镜 面 等 高 反射 物 体 进 行 三 维外 貌 的 测量 , 但 是 由于其 速度慢 , 与 物体 接触 的探 头容 易划 伤物 体 的表 面 , 将 改变 被 测 物体 的反 射 特 性 。常 规 的 干涉 测
中圈分类号 : T B 9 文献 标 识 码 : A 国 家标 准 学 科分 类代 码 : 4 1 0 . 5 5
D O I : 1 0 . 1 5 9 8 8 / j . c n k i . 1 0 0 4—6 9 4 1 . 2 0 1 7 . 0 8 . 0 5 1
Ca l i b r a t i o n f o r Ph a s e— — Me a s u r i n g De le f c t o me t r y Ba s e d o n Bi n o c u l a r Vi s i o n
测量的先 决条件 。由于 L C D显示 屏位于摄像机 的视野之外 , 增加 了标定的 困难 , 本文提出的基于双 目立体视觉 的相位测量偏折测量系统 , 通过姿态转换几
何标定方 法进行 系统标定 , 标定左右两个摄像机与 L C D显示器之问 的相对位置关系 , 并通过实验验证了该标定方 法的可行性和准确性。 关键词 : 相位测量偏折术 ; 双 目立体视觉 ; 标定
双目视觉 标定流程 -回复

双目视觉标定流程-回复什么是双目视觉标定流程?为什么我们需要进行双目视觉标定?在这篇文章中,我将详细介绍双目视觉标定流程的每一个步骤,以及它们的含义和作用。
首先,让我们了解一下什么是双目视觉标定。
双目视觉标定是一种用于计算机视觉和机器视觉的技术,它利用两个摄像机构建一个立体视觉系统。
通过标定,我们可以确定每个摄像机的内外参数,从而使得这两个摄像机能够在三维空间中准确地重建目标物体。
那么,为什么我们需要进行双目视觉标定呢?双目视觉标定的主要目的是解决立体视觉系统中的观测误差和测距误差,从而提高视觉测距和三维重建的精度。
通过标定,我们可以准确地计算出两个摄像机的相对位置和姿态,从而使得我们能够确定目标物体在三维空间中的坐标。
下面是双目视觉标定的流程步骤:1. 摄像机选择和安装:首先,我们需要选择两个摄像机,并将它们适当地安装在一个固定的底座上。
在选择摄像机时,我们要考虑它们的分辨率、视场角、对焦能力等因素。
而在安装摄像机时,我们要确保它们的光心(principal point)在同一平面上,并且与底座垂直。
2. 标定板准备:接下来,我们需要准备一个标定板,它通常是一个带有已知特征的平面板,如棋盘格或圆环格。
我们要确保标定板上的特征点在摄像机的视野范围内,并且能够清晰地识别和检测。
3. 数据采集:现在,我们可以开始采集用于标定的数据了。
我们需要将标定板放置在不同的位置和角度,并在每个位置拍摄一组图像。
在采集数据时,我们要确保标定板的姿态不变,同时还要保持摄像机的位置稳定。
4. 特征提取和匹配:一旦数据采集完成,我们需要对标定板上的特征点进行提取和匹配。
这可以通过图像处理算法或计算机视觉库来实现。
特征提取和匹配的目的是通过标定板上的特征点在两个摄像机视图中的位置关系,计算出两个摄像机的相对位置和姿态。
5. 相机标定参数计算:有了特征点的匹配结果,我们可以使用相机标定算法来计算相机的内外参数。
这些参数包括摄像机的焦距、畸变参数、旋转矩阵和平移向量等。
双目立体视觉技术的实现

双目立体视觉技术的实现双目立体视觉技术是指利用两个摄像机模拟人眼双目视觉,从而实现对物体的立体感知和深度信息的提取。
它已经广泛应用于计算机视觉、机器人视觉、虚拟现实、医学影像等领域。
本文将对双目立体视觉技术的实现进行详细介绍。
一、双目视觉原理人类双目视觉的原理是指两只眼睛在不同的位置观察同一物体,从而产生两个稍微不同的图像。
人脑通过类似于计算机中的算法,对两个图像进行计算,从而提取出立体信息,进而对物体进行深度和空间感知。
二、双目立体视觉技术的实现过程1.摄像机的标定由于摄像机内外参数不同,因此在使用双目立体视觉技术时需要先进行摄像机标定。
摄像机标定的过程包括对摄像机的内部参数和外部参数进行测量和计算。
内部参数包括焦距、主点以及径向和切向畸变等,外部参数包括相机的位置和朝向。
通过标定,可以得到摄像机的参数,进而进行后续的处理。
2.图像匹配图像匹配是双目立体视觉技术中最重要的步骤之一,也是最具挑战性的部分。
图像匹配的目的是找到两张图像中对应的像素点。
常用的图像匹配算法包括基于区域、基于特征和基于深度等。
3.深度计算深度计算是指根据匹配到的像素点,计算出物体的距离,即深度。
常用的深度计算方法包括三角测量法和基于视差的深度计算法。
三角测量法是指根据两个图像中对应像素点的位置关系,通过三角形相似原理计算出物体的距离。
基于视差的深度计算法是指通过计算两幅图像中对应点之间的视差(即两个像素在图像上的水平或垂直距离),从而得出物体到相机的距离。
三、双目立体视觉技术的应用1.计算机视觉双目立体视觉技术在计算机视觉领域中已经被广泛应用。
例如,在物体识别、位姿估计以及场景重建等方面,双目立体视觉技术都有重要的应用。
通过双目视觉,计算机可以更加准确地识别图像中的物体,进而进行自动化的控制和处理。
2.机器人视觉机器人视觉是指将双目视觉技术应用于机器人的感知和控制。
例如,在自主导航、抓取和操纵等方面,机器人需要通过视觉来获取场景信息和深度信息,从而实现自主决策和控制。
双目立体相机自标定方案的研究
双目立体相机自标定方案的研究一、双目立体相机自标定原理双目视觉是通过两个摄像机从不同的角度拍摄同一物体,根据两幅图像重构出物体。
双目立体视觉技术首先根据已知信息计算出世界坐标系和图像坐标系的转换关系,即世界坐标系和图像坐标系的透视投影矩阵,将两幅图像上对应空间同一点的像点匹配起来,建立对应点的世界坐标和图像坐标的转换关系方程,通过求解方程的最小二乘解获取空间点的世界坐标系,实现二维图像到三维图像的重构。
重构的关键问题是找出世界坐标系和图像坐标系的转换关系--透视投影矩阵。
透视投影矩阵包含了图像坐标系和相机坐标系的转换关系,即相机的内参(主要是相机在两坐标轴上的焦距和相机的倾斜角度),以及相机坐标系和世界坐标系的转换关系,即相机的外参(主要是相机坐标系和世界坐标系的平移、旋转量)。
相机标定的过程就是确定相机内参和相机外参的过程。
相机自标定是指不需要标定块,仅仅通过图象点之间的对应关系对相机进行标定的过程。
相机自标定技术不需要计算出相机的每一项参数,但需要求出这些参数联系后生成的矩阵。
二、怎样提高摄像机自标定精确度?方法一、.提高估算基本矩阵F传统的相机自标定采用的是kruppa方程,一组图像可以得到两个kruppa方程,在已知3对图像的条件下,就可以算出所有的内参数。
在实际应用中,由于求极点具有不稳定性,所以采取基本矩阵F分解的方法来计算。
通过矩阵的分解求出两相机的投射投影矩阵,进而实现三维重构。
由于在获取图像过程中存在摄像头的畸变,环境干扰等因素,对图像会造成非线性变化,采用最初提出的线性模型计算 f 会产生误差。
非线性的基本矩阵估计方法得到提出。
近年来非线性矩阵的新发展是通过概率模型降低噪声以提高估算基本矩阵的精度。
方法二、分层逐步标定法。
该方法首先对图像做射影重建,再通过绝对二次曲线施加约束,定出仿射参数和摄像机参数。
由于它较其他方法具有较好的鲁棒性,所以能提高自标定的精度。
方法三、利用多幅图像之间的直线对应关系的标定法。
《2024年度基于双目立体视觉定位和识别技术的研究》范文

《基于双目立体视觉定位和识别技术的研究》篇一一、引言随着科技的飞速发展,计算机视觉技术在许多领域中得到了广泛的应用。
其中,双目立体视觉定位和识别技术以其高精度、高效率的特点,在机器人导航、工业检测、无人驾驶等领域展现出巨大的应用潜力。
本文将围绕双目立体视觉定位和识别技术进行深入的研究和探讨。
二、双目立体视觉技术概述双目立体视觉技术是一种模拟人类双眼视觉的计算机视觉技术。
通过模拟人眼的视差感知原理,双目立体视觉技术利用两个相机从不同角度获取场景的图像信息,然后通过图像处理和算法分析,得到场景中物体的三维信息。
双目立体视觉技术主要包括相机标定、图像获取、图像预处理、特征提取、立体匹配、三维重建等步骤。
三、双目立体视觉定位技术双目立体视觉定位技术是双目立体视觉技术的核心部分,它通过计算左右相机获取的图像间的视差信息,实现场景中物体的三维定位。
具体而言,双目立体视觉定位技术首先需要对相机进行精确的标定,以获取相机的内外参数。
然后通过图像预处理和特征提取,获取场景中的特征点或特征线。
接着,利用立体匹配算法,将左右相机获取的图像进行匹配,得到视差图。
最后,根据视差信息和相机的内外参数,计算得到场景中物体的三维坐标信息。
四、双目立体视觉识别技术双目立体视觉识别技术是在定位技术的基础上,进一步对场景中的物体进行分类和识别。
通过分析物体的形状、大小、纹理等特征信息,结合机器学习、深度学习等算法,实现对物体的识别和分类。
双目立体视觉识别技术可以广泛应用于无人驾驶、机器人导航、工业检测等领域。
五、双目立体视觉技术的应用双目立体视觉技术在许多领域都得到了广泛的应用。
在无人驾驶领域,双目立体视觉技术可以实现车辆的定位和障碍物识别,提高车辆的行驶安全性和自动驾驶的准确性。
在机器人导航领域,双目立体视觉技术可以帮助机器人实现精准的路径规划和导航。
在工业检测领域,双目立体视觉技术可以实现对产品的快速检测和质量控制。
六、研究展望随着计算机视觉技术的不断发展,双目立体视觉定位和识别技术将会有更广泛的应用前景。
双目视觉标定原理

双目视觉标定原理嘿,朋友们!今天咱来聊聊双目视觉标定原理。
这玩意儿啊,就好像是给我们的眼睛装上了一个超级精准的导航仪!你看啊,我们的两只眼睛为啥能让我们看到立体的世界呢?这就是双目视觉的神奇之处啦!它就像是两个小伙伴,一起合作来搞清楚周围物体的形状和位置。
想象一下,我们在看一个物体的时候,左眼看到的和右眼看到的是稍微有点不一样的,就好像是从两个不同的角度去观察。
这一点点的差别可重要了,通过对这些差别的分析和计算,我们就能知道这个物体离我们有多远,有多大啦!双目视觉标定呢,就是要搞清楚这两个“眼睛”的一些特性和参数,让它们能更好地配合工作。
这就好比是给两个小伙伴制定一套规则,让他们能更默契地行动。
比如说,我们得知道每个眼睛的焦距是多少呀,它们之间的距离是多少呀等等。
这些参数就像是密码一样,只有搞清楚了,才能让双目视觉系统发挥出最大的威力。
你说这是不是很神奇?就好像我们在给眼睛做一次精心的调试,让它们能更准确地看清这个世界。
要是没有这个双目视觉标定,那可就乱套啦!我们看到的东西可能就会模糊不清,或者根本不知道物体的准确位置和大小。
那可不行,我们得靠它来准确地判断周围的环境,避免撞到东西或者出什么差错呀。
而且啊,这个双目视觉标定原理在很多领域都有大用处呢!比如机器人领域,让机器人也能像我们一样有“立体视觉”,这样它们就能更好地完成各种任务啦。
还有自动驾驶,要是没有准确的双目视觉标定,那车子怎么能安全地在路上跑呢?所以啊,大家可别小看了这个双目视觉标定原理,它可是让我们的世界变得更加精彩和安全的重要法宝呢!我们应该好好去了解它,探索它的奥秘,让它为我们的生活带来更多的便利和惊喜!这不就是科技的魅力所在嘛!你说是不是呀?。
双目视觉 标定流程
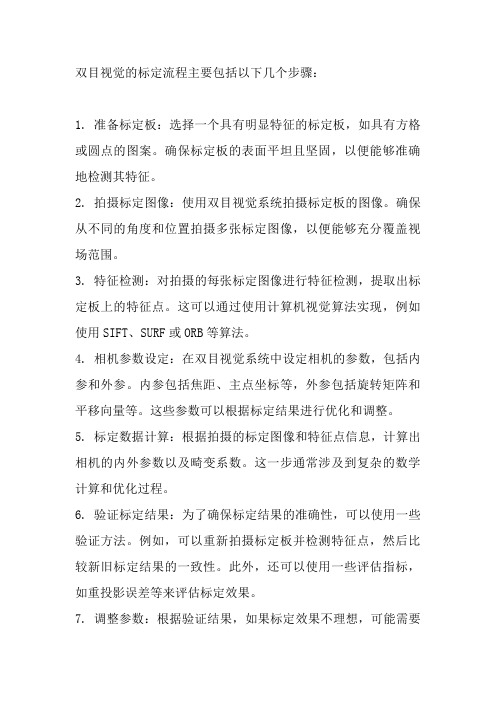
双目视觉的标定流程主要包括以下几个步骤:
1. 准备标定板:选择一个具有明显特征的标定板,如具有方格或圆点的图案。
确保标定板的表面平坦且坚固,以便能够准确地检测其特征。
2. 拍摄标定图像:使用双目视觉系统拍摄标定板的图像。
确保从不同的角度和位置拍摄多张标定图像,以便能够充分覆盖视场范围。
3. 特征检测:对拍摄的每张标定图像进行特征检测,提取出标定板上的特征点。
这可以通过使用计算机视觉算法实现,例如使用SIFT、SURF或ORB等算法。
4. 相机参数设定:在双目视觉系统中设定相机的参数,包括内参和外参。
内参包括焦距、主点坐标等,外参包括旋转矩阵和平移向量等。
这些参数可以根据标定结果进行优化和调整。
5. 标定数据计算:根据拍摄的标定图像和特征点信息,计算出相机的内外参数以及畸变系数。
这一步通常涉及到复杂的数学计算和优化过程。
6. 验证标定结果:为了确保标定结果的准确性,可以使用一些验证方法。
例如,可以重新拍摄标定板并检测特征点,然后比较新旧标定结果的一致性。
此外,还可以使用一些评估指标,如重投影误差等来评估标定效果。
7. 调整参数:根据验证结果,如果标定效果不理想,可能需要
重新调整相机参数或重新拍摄标定图像,并重复上述步骤。
通过以上步骤,可以完成双目视觉系统的标定过程,为后续的立体匹配、三维重建等应用提供准确的相机参数和畸变校正。
一种双目立体视觉相机标定方法

0
- 1
- x /f - y /f
xr yr
2 2
xr yr
4 4
xr yr
(2 x + r )
2
2
2xy
(2 y + r )
2 2
x
y
0
2xy
0
0
( 7)
1. 5 相机外参数
将相机的 3 个平移量 (ΔX s ,ΔYs ,ΔZ s ) 和 3 个 ω,Δ φ,Δ κ) 定义为相机的外参数 . 确定单 旋转量 (Δ 相机的方位需 6 个外方位元素 . 因此确定一对立体 相机的方位需要 12 个外方位元素 ,即 相机 1: X s1 , Ys1 , Z s1 , ω1 , φ1 , k1 ; 相机 2: X s2 , Ys2 , Z s2 , ω2 , φ2 , k2 . 由 12 个外方位元素可确定一对立体相机在物方 点坐标系中的方位 ,即一对立体相机的相对方位 . 将 相机 2的外方位元素减去相机 1的外方位元素 ,得
ΔX s = X s2 - X s1 ΔY s = Y s2 - Y s1 ΔZ s = Z s2 - Z s1 Δ ω = ω2 - ω1 Δ φ = φ2 - φ1 Δk = k2 - k1
不同位置对特殊标定场拍照 , 用 2 台 T5100 电子 经纬仪构成的工业测量系统测量标定场标志点的 [4] 坐标 ,重复测试 5 次 (间隔 2h 测试一次 ) . 第 5 次与第 1 次 标志 点坐 标测 量差 值为 0. 0393mm , 其测量精度 优于 0. 05mm. 采 用拟 合算 法使标 志 点 质 心 提 取 精 度 能 够 达 到 优 于 0. 2p ixel的 亚 像 素级 . 待标定的双目立 体视 觉相 机距标 定架 约 2m 处 ,水平移动相机和旋转相机 90 ° 对标定架上的标 志点拍照 , 利用在 22 个位置拍摄到的 44 组照片进 行标定 . 2. 1 相机内外参数重复性测试 表 1 和表 2 为对 5 次标定实验获得的相机 10 个内部参数 、 6 个外部参数进行统计后的均方根误 差 ( RM S) .
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
An o pt i c a l c a l i b r a t i o n t e c h no l o g y o f b i n o c u l a r s t e r e o v i s i o n
LJ U Xi a o l i ,TI AN Yu a n,TONG Fe i ,T ANG Ji a n,SUIGu o r o n g,CHEN Ba o x u e
关 键词 :双 目立体视 觉 ; 针 孔模 型 ;最大似 然估 计 ;二 维标 定
中 图分 类号 : TN 3 9 1 . 4 文献标 识码 :A d o i :1 0 . 3 9 6 9 / j . i s s n . 1 0 0 5 - 5 6 3 0 . 2 0 1 3 . 0 3 . 0 0 3
Ab s t r a c t :I n o r d e r t o c a l c u l a t e t h e g e o me t r y i n f o r ma t i o n o f t h r e e d i me n s i o n s p a c e b y t wo d i me n s i o n i ma g e i n f o r ma t i o n,a c c u r a t e c a l i b r a t i o n o f t h e c a me r a s y s t e m i s n e c e s s a r y ,B a s e d o n t h e b u i l d i n g a n d a n a l y s i s o f b i n o c u l a r s t e r e o v i s i o n mo d e 1 a n d t h e e x i s t i n g c a l i b r a t i o n me t h o d,a n e w o p t i c a l c a l i b r a t i o n me t h o d wa s p r o p o s e d .I n t h i s me t h o d, t h e b i n o c u l a r s t e r e o v i s i o n t h e o r e t i c mo d e l wa s b u i l t a n d a n a l u z e d,a n d t h e e x i s t i n g c a l i b r a t i o n me t h o d wa s me n d e d .I n t h e e x p e r i me n t ,t h e o p t i c a l p a r a me t e r wa s c a l i b r a t e d b y a b l a c k - b o x t e mp l a t e a n d a l g o r i t h m o n t h e b a s i s o f a b i n o c u l a r c a me r a p l a t f o r m . Th e h o mo g r a p h i c ma t r i x wa s o p t i mi z e d b y u s i n g L e v e n b e r g - Ma r q u a r d t a l g o r i t h m . Th e n, t h e s e p a r a me t e r s we r e o p t i mi z e d b y t h e ma x i mu m l i k e l i h o o d e s t i ma t i o n .Th e r e s u l t s h o ws t h a t t h e a c c u r a c y me e t s t h e r e q u i r e me n t .
第 3 5卷 第 3 期 2 0 1 3 年 6 月
光
学 . 3
OP TI C AL I NS TRUM E N TS
J u n e ,2 0 1 3
文 章编 号 :1 O 0 5 — 5 6 3 O ( 2 0 1 3 ) O 3 — 0 0 1 1 — 0 5
双 目立体视觉的光学标定技术 9 ( -
刘晓利 , 田 媛 , 童 飞 , 唐 舰 , 隋 国荣 , 陈抱 雪
( 上海理 工大学 光 电信息与计算机工程学院 , 上海 2 0 0 0 9 3 )
摘要 : 为 了通过 二 维 图像 信 息计 算三 维 空间 中的几 何信 息 , 对摄 像机 系统进 行精 确标 定 。在 建 立和分 析双 目立体视 觉模 型和 现有摄 像 机标 定 方 法 的基 础 上 , 提 出一 种 新 的光 学标 定方 法 。该 方 法通 过构 建和 分析 双 目摄 像 机 理 论 模 型 , 并 改进 现 有 的 方 法 实现 了双 目立 体 视 觉的 光 学 标
定 。实验在双 目摄 像机 平 台上, 采 用黑 方格模板 和 通过 算法 实现 了光 学参数 的标 定, 使用 L e v e n b e r g - Ma r q u a r d t 算法优化单应矩阵, 并通过最大似然估计法进行参数优化 , 通过试验模型
测定 , 结果 显 示其 实际标 定精 度 为 0 . 0 5 0 9 mm, 满足 双 目立体视 觉的测 定 需求 。
( S c h o o l o f Op t i c a l — El c t r i c a l a n d Co mp u t e r En gi ne e r i n g,Un i v e r s i t y o f Sh a n g h a i f o r ci S e n c e a n d Te c h n o l o g y,S ha n g ha i 2 0 0 0 9 3,Chi n a )