非确定有限自动机的确定化
第二章+(4)非确定有限自动机NFA
{4,5,7,6,2} *
{3,8}
{9}
{9,3,8} *
{9}
{9} *
{9,3,8}
输入字
状态
{1,12} {4,5,72,6,2}*
{33,8} {9,43,8}*
{95} *
a
{4,5,27,6,2}
{59} {95}
b
{33,8} {9,43,8}
a
1
b
b
2
3
4a
5
a
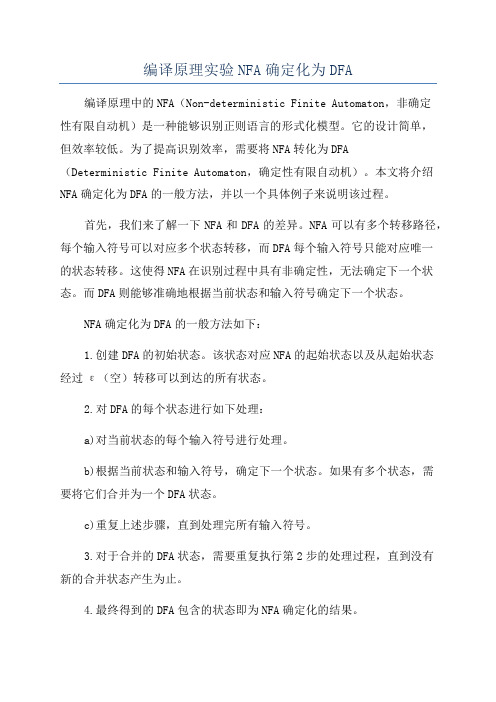
例2:将如下的NFA转化为DFA
例: _CLOSURE({1})={1,2}
5ε
6
b
a
ε
1ε 2
b
ε
a
3
8
9
a
b
ε
4
7
㈡ 状态集I的a转换
若I={S1, … , Sm }是NFA的状态集的一个子集(状态 子集),a, 则定义: Ia = _CLOSURE(J )
其中:
J = f (S1,a) f (S2,a)… f(Sm,a)
定义1’ 对DFA中的两个状态q1和q2 ,如果将它们 看作是初始状态,所接受的符号串相同,则定义 q1和q2是等价的。
注意: DFA的终止状态和非终止状态不是等价的。
无关状态 从有限自动机的初始状态开始,任何输入序列都 不能到达的那些状态称为无关状态。
最小的DFA(化简了的DFA) 如果DFA M 没有无关状态,也没有彼此等价的 状态,则称DFA M 是最小的(或规约的)。
复习
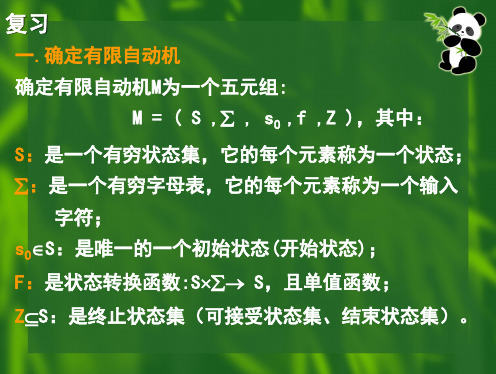
一.确定有限自动机 确定有限自动机M为一个五元组:
M = ( S , , s0 ,f ,Z ),其中: S:是一个有穷状态集,它的每个元素称为一个状态; :是一个有穷字母表,它的每个元素称为一个输入
编译原理课后习题答案(清华大学_张素琴)复习例题
编译原理复习例题(有些内容没有覆盖,比如优化、SLR(1)、LR(1)、LALR(1)等。
但要求至少要按照作业题的范围复习。
)一选择题1.编译的各阶段工作都涉及。
[A]词法分析[B]表格管理 [C]语法分析 [D]语义分析2.型文法也称为正规文法。
[A] 0 [B] 1 [C] 2 [D] 33.文法不是LL(1)的。
[A]递归 [B]右递归 [C]2型 [D]含有公共左因子的4.文法E→E+E|E*E|i的句子i*i+i*i有棵不同的语法树。
[A] 1 [B] 3 [C] 5 [D] 75.文法 S→aaS|abc 定义的语言是。
[A]{a2k bc|k>0} [B]{a k bc|k>0}[C]{a2k-1bc|k>0} [D]{a k a k bc|k>0}6.若B为非终结符,则 A→α.Bβ为。
[A]移进项目 [B]归约项目 [C]接受项目 [D]待约项目7.同心集合并可能会产生新的冲突。
[A]二义 [B]移进/移进 [C]移进/归约 [D]归约/归约8.代码优化时所依据的是。
[A]语法规则 [B]词法规则[C]等价变换规则 [D]语义规则9.表达式a-(-b)*c的逆波兰表示(@为单目减)为。
[A]a-b@c* [B]ab@c*- [C]ab@- [D]ab@c-*10.过程的DISPLAY表是用于存取过程的。
[A]非局部变量[B]嵌套层次 [C]返回地址 [D]入口地址二填空题1.词法分析阶段的任务式从左到右扫描字符流,从而逐个识别一个个的单词。
2.对于文法G[E]:E→T|E+T T→F|T*F F→P^F|P P→(E)|i,句型T+T*F+i的句柄是。
3.最右推导的逆过程称为规范归约,也称为最左归约。
4.符号表的每一项是由名字栏和两个栏目组成。
在目标代码生成阶段,符号表是的依据。
三判断题(认为正确的填“T”,错的填“F”)【】1.同心集的合并有可能产生“归约/归约”冲突。
非确定有限自动机的确定化分析
课程设计报告课程:编译原理学号:姓名:班级:教师:时间:2014.5--2014.6.20计算机科学与技术系图4.4-1 NFA-DFA处理流程图2.NFA转换为DFA的原理及过程通过以下例子说明:①假如输入的NFA如图4.4-2所示:图4.4-2 NFA状态转换图②对于图4.2-2中的状态转换图的状态转换矩阵为:在图4.2-2中的状态转换图加一个起始状态X和结束状态Y,I为起始节点X经过一个或多个ε边到达的状态集,Ia为{X,1}经过a边到达的结点的ε闭包,Ib经过b边到达的结点的ε闭包;知道Ia和Ib列都在I列中出现为止。
如下表4.2.1所示:表4.2.1状态转换矩阵I Ia Ib{X,1} {2,3,Y}{2,3,Y} {2,3,Y}③对表4.2.1的状态转换矩阵进行重新命名,令A={X,1},B={2,3,Y},转换结果如下表4.2.2所示:表4.2.2重命名的状态转换矩阵④表4.2.2相对应的 DFA状态转换图为下图图4.2-2所示:图4.2-2 DFA状态图I Ia IbA BB B结果与分析(可以加页):1.对于下图1中的NFA:图1 NFA状态图2.输入图1中NFA的各边信息:如下截图图2所示:图2 输入各边信息截图3.对于图1的NFA状态转换矩阵和重命名后的状态矩阵如下截图图3所示:图3 DFA状态矩阵截图4.将图3中的状态矩阵图最小化,如下截图图4所示:图4 最小化的DFA5.根据图4最小化的DFA状态转换矩阵,画出DFA状态转换图,如下图图5所示:图5 DFA状态装换图设计体会与建议:编译原理是一门重要但难学的课程,因为编译原理是关于编写编译器的技术,编译器的编写一直被认为是十分困难的事情,所以这次选到课程设计的课题就有些无从下手的感觉,感觉任务挺艰巨的。
设计要求从理论上就不太好理解,不像以前的设计编写一个应用程序实现常见的功能,这次的课程设计注重各种算法的实现,比如用子集法实现不确定的有限自动机的确定化、又能够分割法实现确定的有限自动机的最小化。
不确定有限状态自动机的确定化NFATODFA
不确定有限状态自动机的确定化(NFA TO DFA)不确定有限状态自动机的确定化(NFA TO DFA 2008-12-05 22:11#in clude<iostream>#in clude<stri ng>#defi ne MAXS 100using n amespace std;string NODE; // 结点集合stri ng CHANGE; // 终结符集合int N; //NFA 边数struct edge{stri ng first;stri ng cha nge;stri ng last;};struct cha n{stri ng ltab;stri ng jihe[MAXS];};void kon g(i nt a){int i;for(i=0;i<a;i++)cout«'';}//排序void paixu(stri ng &a){int i,j;char b;for(j=0;j<a」en gth();j++)for(i=0;i<a」en gth();i++)if(NODE.fi nd(a[i])>NODE.fi nd(a[i+1])){b=a[i];a[i]=a[i+1];a[i+1]=b;void eclouse(char c,stri ng &he,edge b[]){int k;for(k=0;k<N;k++){if(c==b[k].first[0])if(b[k].cha nge=="*"){if(he.fi nd(b[k].last)>he.le ngth())he+=b[k].last; eclouse(b[k].last[0],he,b);}}}void move(cha n &he,i nt m,edge b[]){int i,j,k,l;k=he .l tab .len gth();l=he.jihe[m].le ngth();for(i=0;i<k;i++)for(j=0;j<N;j++)if((CHANGE[m]==b[j].cha nge[0])&&(he.ltab[i]==b[j].first[0])) if(he.jihe[m].find(b[j].last[0])>he.jihe[m].le ngth()) he.jihe[m]+=b[j].last[0];for(i=0;i<l;i++)for(j=0;j<N;j++)if((CHANGE[m]==b[j].cha nge[0])&&(he.jihe[m][i]==b[j].first[0] ))if(he.jihe[m].fi nd(b[j].last[0])>he.jihe[m].le ngth()) he.jihe[m]+=b[j].last[0]; }//输出void outputfa(i nt le n,i nt h,cha n *t){int i,j,m;cout«" I ";for(i=0;i<le n;i++) coutv<TvvCHANGE[i]vv" ";cout«endlvv" ------------------------- "<<e ndl;for(i=0;i<h;i++)cout«' '<<t[i].ltab;m=t[i].ltab.le ngth();for(j=0;j<le n;j++){{kon g(8-m);m=t[i].jihe[j].le ngth();cout<<t[i].jihe[j];}cout«e ndl;}}void mai n(){edge *b=new edge[MAXS];int i,j,k,m,n,h,x,y,len;bool flag;stri ng jh[MAXS],e ndno de,ed no de,sta;coutvv"请输入NFA各边信息(起点条件[空为*]终点),以#结束:"vvendl; for(i=0;i<MAXS;i++){cin> >b[i].first;if(b[i].first=="#") break;cin> >b[i].cha nge»b[i].last;}N=i;/*for(j=0;j<N;j++)cout<<b[j].firstvvb[j].cha nge<<b[j].lastvve ndl;*/for(i=0;i<N;i++){if(NODE.fi nd(b[i].first)>NODE.Ie ngth())NODE+=b[i].first;if(NODE.fi nd(b[i].last)>NODE.le ngth())NODE+=b[i].last;if((CHANGE.fi nd(b[i].cha nge)>CHANGE.Ie ngth())&&(b[i].cha nge!="*"))CHANGE+=b[i].cha nge;}len=CHANGE.le ngth();coutvv"结点中属于终态的是:"<<endl;{coutvv"所输终态不在集合中,错误! "<<e ndl;cin>>endno de;for(i=0;i<e ndnode.len gth();i++)if(NODE.fi nd(e ndn ode[i])>NODE.le ngth()) {{coutvv"所输终态不在集合中,错误! "<<e ndl; return;}〃cout«"e ndno de="«e ndno de<<e ndl;chan *t=new chan [MAXS];t[O].ltab=b[O].first;h=1;for(j=0;j<le n;j++){paixu(t[i].jihe[j]);//对集合排序以便比较for(k=0;k<h;k++){flag=operator==(t[k].ltab,t[i].jihe[j]);if(flag)break;}if(!flag&&t[i].jihe[j].le ngth())t[h++].ltab=t[i].jihe[j];} }cout«endlvv"状态转换矩阵如下:"<<endl;outputfa(len,h,t); II 输出状态转换矩阵eclouse(b[0].first[0],t[0].ltab,b); //cout<<t[0].ltab<<e ndl; for(i=0;i<h;i++) { for(j=0;j<t[i].ltab.le ngth();j++) for(m=0;m<le n;m++) eclouse(t[i].ltab[j],t[i].jihe[m],b); for(k=0;k<le n;k++) { 〃cout<vt[i].jihe[k]vv"->"; move(t[i],k,b); 〃cout<vt[i].jihe[k]vve ndl; for(j=0;j<t[i].jihe[k].le ngth();j++) eclouse(t[i].jihe[k][j],t[i].jihe[k],b); // } // 求 e-clouse // 求 e-clouse // 求 move(I,a) 求 e-clouse//状态重新命名NODE.erase();cout«endlvv"重命名:"<<endl; for(i=0;i<h;i++)sta=t[i].ltab;{t[i].ltab.erase();t[i].ltab='A'+i;NODE+=t[i].ltab;coutvv'{'v<stavv"}="vvt[i].ltabvve ndl;for(j=0;j<e ndnode.len gth();j++)if(sta.fi nd(e ndno de[j])<sta.le ngth()) d[1]=ednode+=t[i].ltab;for(k=0;k<h;k++) for(m=0;m<le n;m++) if(sta==t[k].jihe[m])t[k].jihe[m]=t[i].ltab;}for(i=0;i<NODE.le ngth();i++)if(ed node.fi nd(NODE[i])>ed node.le ngth()) d[0]+=NODE[i]; endnode=ednode;cout«endl<v"DFA 如下:"<<endl; outputfa(len,h,t); // 输出DFA cout«"其中终态为:"<<endnode<<endl; //DFA最小化m=2;sta.erase();flag=0;for(i=0;i<m;i++){〃coutvv"d["vvivv"]="vvd[i]vve ndl;for(k=0;k<le n;k++){//coutv<TvvCHANGE[k]vve ndl;y=m;for(j=0;j<d[i].le ngth();j++){for(n=0;n<y;n++){if(d[ n].fi nd(t[NODE.fi nd(d[i][j])].jihe[k])<d[ n].le ngth() ||t[NODE.fi nd(d[i][j])].jihe[k].le ngth()==0){if(t[NODE.fi nd(d[i][j])].jihe[k].le ngth()==0)x=m;elsex=n;if(!sta.le ngth())sta+=x+48;{}elseif(sta[0]!=x+48){ d[m]+=d[i][j]; flag=1;d[i].erase(j,1); 〃cout<vd[i]vve ndl;j--;} break; // 跳出n}}//n}〃jif(flag){m++;flag=0;}//cout<<"sta="<<sta<<e ndl; sta.erase();}//k}//icout«endl<<"集合划分:";for(i=0;i<m;i++)cout<v"{"vvd[i]vv"}";cout«e ndl;//状态重新命名cha n *md=new cha n[ m];NODE.erase();cout«endlvv"重命名:"<<endl;for(i=0;i<m;i++){md[i].ltab='A'+i;NODE+=md[i].ltab; coutvv"{"v<d[i]vv"}="vvmd[i].ltabvve ndl; }for(i=0;i<m;i++)for(k=0;k<le n;k++)for(j=0;j<h;j++){if(d[i][0]==t[j].ltab[0])for(n=0;n<m;n++){{if(!t[j].jihe[k]」e ngth()) break;elseif(d[ n].fi nd(t[j].jihe[k])<d[ n].le ngth()) {md[i].jihe[k]=md[ n] .Itab;break;}}break;}}edno de.erase();for(i=0;i<m;i++)for(j=0;j<e ndnode.len gth();j++) if(d[i].fi nd(e ndno de[j])<d[i].le ngth()&&ed node.fi nd(md[i].lta b))edno de+=md[i].ltab;endnode=ednode;cout«endlvv"最小化DFA如下:"<<endl;outputfa(le n,m ,md);cout«"其中终态为:"<<endnode<<endl;}/////////////////////////////////测试数据:i* 11a 11b 11 * 22a 32b 43a 54 b 55* 66 a 66 b 66 * f#////////////////////////////////请输入NFA各边信息(起点条件[空为*]终点),以#结束:i * 11 a 11b 11 * 22a 32b 43a 54 b 55* 66 a 66 b 66 * f#结点中属于终态的是:状态转换矩阵如下:I la lbi12 123 12412312356f124124123 12456f12356f12356f1246f12456f1236f 12456f1246f 1236f 12456f1236f 12356f1246f重命名:{i12}=A{123}=B{124}=C{12356f}=D{12456f}=E{1246f}=FDFA如下:I Ia Ib B D C C B E DDF E G E F G E G D F其中终态为:DEFG集合划分:{A} {DEFG} {B} {C}重命名:{A}=A{DEFG}=B{B}=C{C}=D最小化DFA如下:I la lbA C DB B BC B DD C B 其中终态为:B。
NFM(非有限自动机)的确定化

编译原理课程设计:NFM(非有限自动机)的确定化代码如下:// 编译原理课程设计.cpp : 定义控制台应用程序的入口点。
//#include "stdafx.h"#include<iomanip>#include<iostream>#include<fstream>#include<cmath>#include<string>using namespace std;#define MAX 20class mul_str{public:string str[MAX];};string state_change[MAX][MAX] ;string judge;string result[MAX][MAX];string str_start;string str_end;int line, column;int result_count = 0;void init();void read_file();bool cmp(string s1,string s2);string begin();string start(string s);void operation();void show();int look_line(string s);int look_line2(string s);int look_column(string s);bool check();void make_sure();int _tmain(int argc, _TCHAR* argv[]){while(true){init();if(check()){operation();make_sure();show();cout<<"已输出至result.txt"<<endl;}}return 0;}//初始化void init(){read_file();cout<<"非有限自动机为:"<<endl;cout<<" ";for(int i = 1 ; i < column ; i ++){cout<<setw(3)<<state_change[0][i]<<" ";}cout<<endl;for(int i = 1 ; i < line; i ++){for(int j = 0; j < column; j ++){cout<<setw(3)<<state_change[i][j]<<" ";}cout<<endl;}}//读文件void read_file(){line = 0;column = 0;int i = 0 ;string con ;ifstream in;in.open("state.txt",ios::in);if(!in){cerr<< "open error!";}while(!in.eof()){in >> con;if("-2" == con){column = i;i = 0;line ++;}else{state_change[line][i] = con;i ++ ;}}}//字符串比较bool cmp(string s1, string s2){int i, j;bool con ;con = false ;if(s1.length() != s2.length()){return false;}else{for(i = 0; i < s1.length(); i++ ){con = false ;for(j = 0; j < s2.length(); j ++){if(s1[i] == s2[j] ){con = true;j = s2.length() + 1;}}if( con == false ){return false;}}return con;}}//检查bool check(){cout<<"input the start char please"<<endl;cin>> str_start;cout<<"input the end char please"<<endl;cin>> str_end;bool con = true ;for(int i =0 ; i < line; i ++)for(int j = 0; j < column; j ++){if(state_change[i][j] == str_start){con = false;}}if(con){cout<< "start char is error!"<<endl;return false;}con = true ;for(int i =0 ; i < line; i ++)for(int j = 0; j < column; j ++){if(state_change[i][j] == str_end){con = false;}}if(con){cout<< "end char is error!"<<endl;return false;}return true;}//查所在行int look_line(string s){for(int i = 0; i < line; i++){if(s == state_change[i][0]){return i;}}return 0;}//确定化int look_line2(string s){for(int i = 0; i <result_count; i++){if(cmp(s,result[i][0])){return i;}}return 0;}//查所在列int look_column(string s){for(int i = 0; i < column; i++){if(s == state_change[0][column]){return i;}}return 0;}//开始的第一个状态string start(string s1, int column){string temp1;string temp2;int i;int temp_line;temp1 = s1;for(i = 0; i<temp1.length(); i ++){temp2 = temp1[i];if(str_end == temp2){//return "y";}else{temp_line = look_line(temp2);if(temp_line == 0){cerr<<temp2<<"状态有错误"<<endl;int i;cin >> i;}if(state_change[temp_line][column] != "-1"){bool temp_con =false;int temp_i ;for(temp_i = 0; temp_i < temp1.length(); temp_i ++){temp2 = temp1[temp_i];temp_con = cmp(temp2,state_change[temp_line][column]);if(temp_con){break ;}}if(!temp_con){temp1 += state_change[temp_line][column];}}}}return temp1;}//求某一状态string begin(string s1, int column){string temp1;string temp2;string temp3="";int i;int temp_line;temp1 = s1;int a = temp1.length();for(i = 0; i<a; i ++){temp2 = temp1[i];if(str_end == temp2){}else{temp_line = look_line(temp2);if(temp_line == 0){cerr<<temp2<<"状态有错误"<<endl;int i;cin >> i;}if(state_change[temp_line][column] != "-1"){bool temp_con =false;int temp_i ;for(temp_i = 0; temp_i < temp3.length(); temp_i ++){temp2 = temp3[temp_i];temp_con = cmp(temp2,state_change[temp_line][column]);if(temp_con){break ;}}if(!temp_con){temp3 += state_change[temp_line][column];}}}}column = 1;temp1 = temp3;for(i = 0; i<temp1.length(); i ++){temp2 = temp1[i];if(str_end == temp2){}else{temp_line = look_line(temp2);if(temp_line == 0){cerr<<temp2<<"状态有错误"<<endl;int i;cin >> i;}if(state_change[temp_line][column] != "-1"){bool temp_con =false;int temp_i ;for(temp_i = 0; temp_i < temp1.length(); temp_i ++){temp2 = temp1[temp_i];temp_con = cmp(temp2,state_change[temp_line][column]);if(temp_con){break ;}}if(!temp_con){temp1 += state_change[temp_line][column];}}}}return temp1;}//调用求状态的过程void operation(){bool con = true;bool con2 = false ;string temp;int i, j, k;i = 0;j = 0;temp = state_change[1][0];temp = start(str_start,1);judge = temp;while(con){result[result_count][0]=judge;// cout<<"当前状态:"<<judge<<" ";for(j = 2 ; j < column; j ++){temp = begin(judge,j);// cout<<"经过:"<<state_change[0][j]<<"之后:"<<temp<<" ";result[result_count][j]=temp;}//cout<<endl;result_count ++;for(i = 0 ; i < result_count ; i ++){for(j = 2; j < column ; j ++){for(k = 0; k < result_count ; k ++){con2=cmp(result[k][0],result[i][j]);if(con2){k = result_count + 1 ;}}if(k == result_count){judge = result[i][j];con = true ;i = result_count+1 ;j = column +1;}}}if(i == result_count){con = false;}}}//显示void show(){ofstream out;out.open("res0lt.txt",ios::out|ios::ate);if(!out){cerr<<"open error";}for(int i = 0 ; i < result_count; i ++){for(int j = 0; j < column; j ++){int lengh;int k;lengh = result[i][j].length();if(lengh > 0){out<<"{";out<< result[i][j][0];for(k = 1 ; k < lengh ; k ++ ){out<<","<<result[i][j][k];}out<<"}";for(; k < 18 ;k ++){out<<" ";}}}out<<endl;}out.close();}//确定化void make_sure(){cout<<"确定化以后:"<<endl;cout<<" ";for(int i = 2 ; i < column ; i ++){cout<<state_change[0][i]<<" ";}cout<<endl;for(int i = 0 ; i < result_count; i ++){cout<<i<<" ";for(int j = 2; j < column; j ++){cout<<look_line2(result[i][j])<<" ";}cout<<endl;}}。
编译原理实验NFA确定化为DFA
编译原理实验NFA确定化为DFA编译原理中的NFA(Non-deterministic Finite Automaton,非确定性有限自动机)是一种能够识别正则语言的形式化模型。
它的设计简单,但效率较低。
为了提高识别效率,需要将NFA转化为DFA(Deterministic Finite Automaton,确定性有限自动机)。
本文将介绍NFA确定化为DFA的一般方法,并以一个具体例子来说明该过程。
首先,我们来了解一下NFA和DFA的差异。
NFA可以有多个转移路径,每个输入符号可以对应多个状态转移,而DFA每个输入符号只能对应唯一的状态转移。
这使得NFA在识别过程中具有非确定性,无法确定下一个状态。
而DFA则能够准确地根据当前状态和输入符号确定下一个状态。
NFA确定化为DFA的一般方法如下:1.创建DFA的初始状态。
该状态对应NFA的起始状态以及从起始状态经过ε(空)转移可以到达的所有状态。
2.对DFA的每个状态进行如下处理:a)对当前状态的每个输入符号进行处理。
b)根据当前状态和输入符号,确定下一个状态。
如果有多个状态,需要将它们合并为一个DFA状态。
c)重复上述步骤,直到处理完所有输入符号。
3.对于合并的DFA状态,需要重复执行第2步的处理过程,直到没有新的合并状态产生为止。
4.最终得到的DFA包含的状态即为NFA确定化的结果。
下面以一个具体的例子来说明NFA确定化为DFA的过程。
考虑以下NFA:(状态)(输入符号)(转移状态)1a,ε1,22a33b44a5首先,创建DFA的初始状态,根据NFA的起始状态和通过ε转移可以到达的状态。
在该例子中,起始状态为1,通过ε转移可以到达状态1和2、因此,初始状态为{1,2}。
接下来,对初始状态{1,2}进行处理。
对于输入符号a,根据NFA的状态转移表可以得到DFA的下一个状态为{1,2,3},因为NFA的状态1通过a和ε可以到达状态3、对于输入符号b,当前状态没有转移。
非确定有限自动机NFA的确定化
个非常不错 的选择 。 系统提供 了一个温室环境信息 本
远程监控系统 , 利用手机短信模块 和单 片机制成 一个单 机 , 本低 , 成 易于推广 , 具有很好 的发展前景 。
参考文献 [惆 驰 岷, 世勇, 1 潘 牟行军 , 一种 G M无线固定电话设计方 S 案, 微型 电脑应用 ,0 5年第 6期 2 — 7 20 52 [] 2胡顺 安 , 书茂 , 能化农业 信息远 程采集 系统 , 计 王 智 设 与研究 ,0 5年第 6期 3 — 4 20 23 [] 3李鸿 , 用单 片机控制 手机收 发短信 , 计算 机应用 ,0 3 20
维普资讯
信 息 技 术
■■_
在编译系统中 , 词法分析 阶段是 整个 编译 系统的基 础 。对于单词 的识 别 , 限 自动机 F 有 A是一种 十分 有效 的工具。有 限 自动机 由其映射 f 是否为单值而分为确定
的 有 限 自动 机 D A和 非 确 定 的有 限 自动 机 N A 在 非 F F。 确 定 的有 限 自动 机 N A中 , 由于 某 些 状 态 的转 移 需 从 F
控器 为主 ,由 G M手 机模块 和单片机控制系统两部分 S 组成 。每套 J 3 B 5模块都附带有设置软件光盘 和电脑通 讯电缆。 通过 电脑运行 J 3 B 5设置软件 , 户可以 自己定 用 义每路继 电器 的打开 和关 闭的短信 内容 , 作为 以后短信 遥控 的控 制指令 ,并 通过 通讯 电缆 写入 J 3 块 的 B 5模 E P O 存储 器 内 , E R M 即使 断 电也 不 会丢 失数 ER M EPO 据。例 如 : 1 第 路继电器用来遥控喷淋器 的开关 。先把 J3 B 5用电缆连接到计算 机的串 口, 并运行 J 3 B 5设置软 件后 , 出现一个全 中文窗 口软件 界面 , 会 在打 开第 1 路 继电器的短信指令 文字框 内, 输入 “ 打开喷淋器”; 在关 闭第 1 路继 电器 的短信指令 文字框 内 , 入 “ 输 关闭喷淋 器”。最后断开 电缆取下 J 3 B 5模块 , 并把模块安装 到喷 淋器上就完成 了。 当收到温室大棚传来 的信息确定需要 灌溉 时,只需用手机 向安装 在喷淋器 内的 J 3 B 5模块发 送 一条 内容 为 “ 打开喷淋器 ”的短 消息 , 便可 以打开温 室内 的喷 淋器 ; 如果想关 掉喷 淋器 , 只要 发送 “ 闭喷 关 淋器 ”即可 。J 3 B 5模块共有 8 路继 电器输 出 , 每路继 电 器用 户都 可以按 以上方法设置 自己需要 的控制 内容 , 非 常直 观和人性化 。此外 , 专家 自己设 置的短信遥控指令 内容 ,其他人 不知道 ,因此 即使别人也 用手机 向你 的 J3 B 5模块发短消息 , 由于短信遥控指 令 内容不正 确 , 但 也无法控制你 的电机 。同时 , 机 SM卡 号码 的唯一性 手 I
编译原理考试试题与答案(汇总)
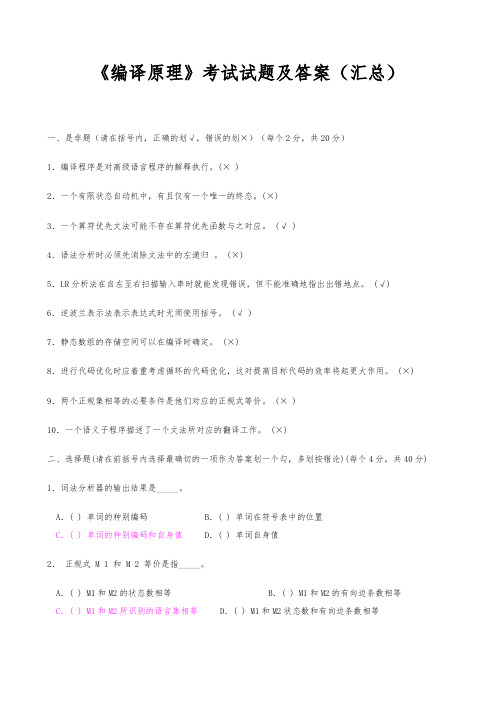
19.正规文法产生的语言都可以用上下文无关文法来描述。 ( )
20.一个优先表一定存在相应的优先函数。 ( )
21.3型文法一定是2型文法。 ( )
22.如果一个文法存在某个句子对应两棵不同的语法树,则文法是二义性的。 ( )
答案:1.× 2.× 3.× 4.√ 5.√ 6.× 7.×8.× 9.√ 10.× 11.×
5.LR分析法在自左至右扫描输入串时就能发现错误,但不能准确地指出出错地点。(√)
6.逆波兰表示法表示表达式时无须使用括号。(√ )
7.静态数组的存储空间可以在编译时确定。(×)
8.进行代码优化时应着重考虑循环的代码优化,这对提高目标代码的效率将起更大作用。(×)
9.两个正规集相等的必要条件是他们对应的正规式等价。(× )
else while (A ≤ D)
A=A+2;
}。
解:该语句的四元式序列如下(其中E1、E2和E3分别对应A<C∧B<D、A≥1和A≤D,并且关系运算符优先级高):
100 (j<,A,C,102)
101 (j,_,_,113)
102 (j<,B,D,104)
103 (j,_,_,113)
104 (j=,A,1,106)
C.( )编译方法D.( )以上三项都是
6.四元式之间的联系是通过_____实现的。
A.( )指示器B.( )临时变量
C.( )符号表D.( )程序变量
7.表达式(┐A∨B)∧(C∨D)的逆波兰表示为_____。
A. ( ) ┐AB∨∧CD∨B.( ) A┐B∨CD∨∧
C.( ) AB∨┐CD∨∧D.( ) A┐B∨∧CD∨
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程设计报告
课程:
编译原理
学号:
姓名:
班级:
教师:
时间:
2014.5--2014.6.20
计算机科学与技术系
图4.4-1 NFA-DFA处理流程图
2.NFA转换为DFA的原理及过程通过以下例子说明:
①假如输入的NFA如图4.4-2所示:
图4.4-2 NFA状态转换图
②对于图4.2-2中的状态转换图的状态转换矩阵为:在图4.2-2中的状态转换图加一个起始状态X和结束状态Y,I为起始节点X经过一个或多个ε边到达的状态集,Ia为{X,1}经过a边到达的结点的ε闭包,Ib经过b边到达的结点的ε闭包;知道Ia和Ib列都在I列中出现为止。
如下表4.2.1所示:
表4.2.1状态转换矩阵
I Ia Ib
{X,1} {2,3,Y}
{2,3,Y} {2,3,Y}
③对表4.2.1的状态转换矩阵进行重新命名,令A={X,1},B={2,3,Y},转换结果如下表4.2.2所示:
表4.2.2重命名的状态转换矩阵
I Ia Ib
A B
B B
④表4.2.2相对应的 DFA状态转换图为下图图4.2-2所示:
图4.2-2 DFA状态图
结果与分析(可以加页):
1.对于下图1中的NFA:
图1 NFA状态图
2.输入图1中NFA的各边信息:如下截图图2所示:
图2 输入各边信息截图
3.对于图1的NFA状态转换矩阵和重命名后的状态矩阵如下截图图3所示:
图3 DFA状态矩阵截图
4.将图3中的状态矩阵图最小化,如下截图图4所示:
图4 最小化的DFA
5.根据图4最小化的DFA状态转换矩阵,画出DFA状态转换图,如下图图5所示:
图5 DFA状态装换图
设计体会与建议:
编译原理是一门重要但难学的课程,因为编译原理是关于编写编译器的技术,编译器的编写一直被认为是十分困难的事情,所以这次选到课程设计的课题就有些无从下手的感觉,感觉任务挺艰巨的。
设计要求从理论上就不太好理解,不像以前的设计编写一个应用程序实现常见的功能,这次的课程设计注重各种算法的实现,比如用子集法实现不确定的有限自动机的确定化、又能够分割法实现确定的有限自动机的最小化。
课题虽然感觉难懂了一些,但我想不管结果如何,只要自己努力,尽力了就行。
小组各成员始终相信“世上无难事,只怕有心人”。
由于课程设计有几周的时间,时间很充裕,所以这在这几周设计中,我们小组团结合作,互帮互助,大家都感觉这几周过的非常充实,尽管累了点。
同时通过这次课程设计我们深深地感觉到团队的力量,深深体会到“团结就是力量”。
当我们开始困惑无从下手时,我们你一句我一句的意见很快让我们找到了前进的方向。
当自己遇到疑难时,和组员一起讨论解决了问题感觉非常欣慰,无助和孤独感也顿时消失。
通过这次课程设计给我另一个很大的体会是:流程图的重要性。
说实话,每次不管是课程设计报告还是实习报告,我们最害怕做的就是画流程图,所以每次报告中能省则省。
而这次发现根据系统需实现的功能和算法画出流程图后,就很清楚地知道我们的程序需要哪些模块,每个模块需要实现什么功能。
所以在我们以后的学习中我们不能畏惧画流程图,我们要积极锻炼我们画流程图的能力,从而来帮助我们提高编程的能力。
每次的课程设计,和以前的相比,我发现了自己的一次又一次的进步,因为越到最后,越会发现自己的不足,就会想着怎样去改进,怎样去完善自己的系统,所以每学期的课程设计是很必要的,因为我在这些过程中都学到了很多知识。
20。