现代控制技术基础汇编
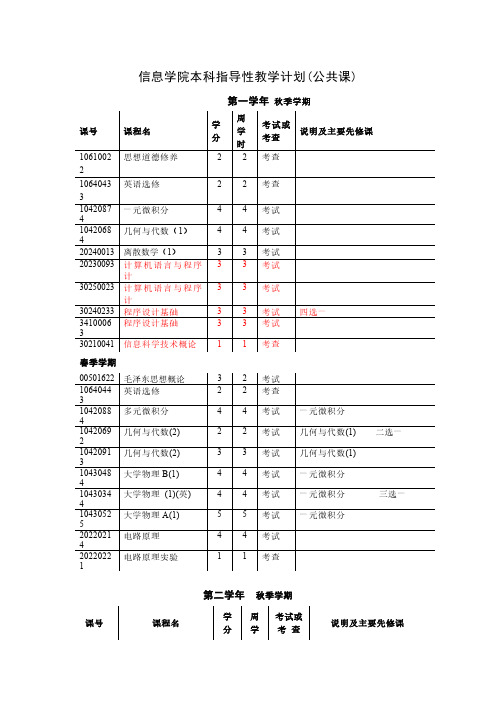
清华大学计算机科学及技术专业课程表
嵌入式系统3计算机组成原理操作系统40240412数字系统设计自动化2数字逻辑电路30240222VLSI设计导论2数字逻辑电路计算机软件与理论---计算机科学与技术专业选修不少于2学分课号课程名学分先修要求初等数论及其应用2离散数学30240192高性能计算导论2(英语讲课)计算机系统结构30240262数据库系统原理2数据结构网络编程与计算技术2计算机组成原理软件开发方法2C++ 数据结构软件工程30240134软件工程3C++数据结构计算机应用技术-----计算机科学与技术专业选修不少于2学分课号课程名学分先修要求30240042人工智能导论2离散数学40240452模式识别2几何与代数概率与统计人工智能导论40240062数字图象处理2概率与统计程序设计基础40240392多媒体技术基础及应用2信号处理原理40240422计算机图形学基础2数据结构40240472计算机实时图形和动画2几何与代数技术40240402虚拟现实2计算机组成原理40240462现代控制技术2系统分析与控制40240372信息检索2数据结构40240362电子商务平台及核心技术2数据结构JAVA程序设计数据库系统原理40240492数据挖掘2数据库系统原理计算机科学与技术专业专题训练不少于5学分,其中计算机网络专题训练为必选课号课程名学分先修要求计算机网络专题训练1(秋)操作系统专题训练2(秋)编译原理专题训练2(秋)数据库专题训练2(秋)计算机科学与技术专业的任选课程课号课程名学分先修要求30240253微计算机技术3汇编语言程序设计初等数论及其应用2离散数学网络编程与计算技术2计算机组成原理30240134软件工程3C++数据结构30240042人工智能导论2离散数学40240452模式识别2几何与代数概率与统计人工智能导论40240062数字图象处理2概率与统计程序设计基础40240392多媒体技术基础及应用2信号处理原理40240422计算机图形学基础2数据结构40240472计算机实时图形和动画技术2几何与代数40240402虚拟现实2计算机组成原理40240462现代控制技术2系统分析与控制40240372信息检索2数据结构40240362电子商务平台及核心技术2数据结构JAVA程序设计数据库系统原理40240492数据挖掘2数据库系统原理计算机科学与技术专业 业务培养目标:本专业培养具有良好的科学素养,系统地、较好地掌握计算机科学与技术包括计算机硬件、软件与应用的基本理论、基本知识和基本技能与方法,能在科研部门、教育单位、企业、事业、技术和行政管理部门等单位从事计算机教学、科学研究和应用的计算机科学与技术学科的高级专门科学技术人才。
《技术与设计1》教案(汇编3篇)

《技术与设计1》教案(汇编3篇)(实用版)编制人:__________________审核人:__________________审批人:__________________编制单位:__________________编制时间:____年____月____日序言下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!并且,本店铺为大家提供各种类型的教育资料,如工作总结、工作计划、工作报告、活动总结、实习报告、演讲稿、规章制度、心得体会、自我鉴定、其他范文等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor.I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!Moreover, this store provides various types of educational materials for everyone, such as work summaries, work plans, work reports, activity summaries, internship reports, speeches, rules and regulations, experiences, self-evaluation, and other sample articles. If you want to learn about different data formats and writing methods, please pay attention!《技术与设计1》教案(汇编3篇)《技术与设计1》教案篇1新学期第一堂课《技术与设计1》龙城高级中学倪跃群今秋全面推行的新课程,是一场静悄悄的教育革命。
计算机基础——理论必考知识点汇编
For personal use only in study and research; not for commercial use第一章信息技术概述一.信息与信息技术(一)信息:1.客观事物立场:事物运动的状态及状态变化的方式2.认识主体立场:认识主体所感知或所表述的事物运动及其变化方式的形式、内容和效用3.信息是人们认识世界和改造世界的一种基本资源。
(二)信息处理的行为和活动:信息收集、信息加工、信息存储、信息传递、信息施用。
(三)信息技术IT:用来扩展人的信息器官功能、协助人们进行信息处理的一类技术。
1.扩展人类感觉器官功能的感测(获取)技术与识别技术——雷达2.扩展神经系统功能的通信技术3.扩展大脑功能的计算(处理)与存储技术——信息系统4.扩展效应器官功能的控制与显示技术(四)常见信息处理系统1.电视/广播系统:单向的、点到多点(面)的以信息传递为主要目的的系统。
2.电话:双向的、点到点的以信息交互为主要目的的系统3.Internet是一种跨越全球的多功能信息处理系统(五)现代信息技术1.特点:以数字技术为基础、以计算机为核心、采用电/光子技术。
2.涉及领域:通信、广播、计算机、微电子、遥感遥测、自动控制、机器人等。
3.核心技术:微电子技术、通信技术、计算机技术二.微电子技术简介(一)微电子技术以集成电路为核心;集成电路芯片是信息产业的基础(二)集成电路IC:1.定义:以半导体单晶片作为材料,经平面工艺加工制造,将大量晶体管、电阻等元器件及互连线构成的电子线路集成在基片上,构成一个微型化的电路或系统。
2.特点:体积小、重量轻、可靠性高、功耗小3.现代集成电路使用的半导体材料:硅(Si)、砷化镓(GaAs)等4.制造:1)工序:从原料熔炼开始到最终产品包装大约需要400多道工序。
2)条件:必须在恒温、恒湿、超洁净的无尘厂房内完成。
3)工艺技术名称:硅平面工艺4)技术指标:线宽(主流技术线宽为45纳米或65纳米)5.集成电路的工作速度主要取决于组成逻辑门电路的晶体管的尺寸,晶体管的尺寸越小,其极限工作频率越高,门电路的开关速度就越快。
计算机控制技术课后习题与答案
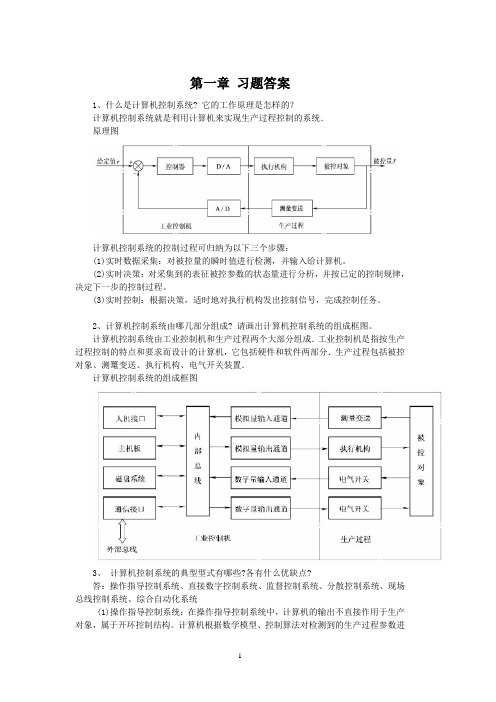
在模拟量输入通道中,A/D转换器将模拟信号转换成数字量总需要一定的时间,完成一次A/D转换所需的时间称之为孔径时间。对于随时间变化的模拟信号来说,孔径时间决定了每一个采样时刻的最大转换误差,即为孔径误差。
7、采样保持器的作用是什么?是否所有的模拟量输入通道中都需要采样保持器?为什么?
(1)A/D转换过程(即采样信号的量化过程)需要时间,这个时间称为A/D转换时间。在A/D转换期间,如果输入信号变化较大,就会引起转换误差。所以,一般情况下采样信号都不直接送至A/D转换器转换,还需加保持器作信号保持。保持器把t=kT时刻的采样值保持到A/D转换结束。
当尖峰型串模干扰成为主要干扰源时用双积分式转换器可以削弱串模干基于rs485总线扩展卡的硬件设计方案可编程控制器rs485rs485总线扩rs485其它智能装置智能io模块智能调节器rs485rs485rs485ipc系统总线基于rs232rs485转换模块的硬件设计方案可编程控制器rs485转换器rs232rs485其它智能装置智能io模块智能调节rs485rs485rs485ipc扰的影响
微控制原理

微控制原理
微控制原理是一门研究微处理器、微控制器、嵌入式系统等微型计算机系统的基本原理、结构与应用的学科。
在现代电子技术领域中,微控制原理扮演着重要的角色。
它是电子工程和计算机科学学生的必修课程之一,也是从事嵌入式系统开发的工程师必备的技能。
微控制原理的主要内容包括微处理器和微控制器的基本原理、硬件结构和软件编程等方面。
它涉及到数字系统的基本原理、数字电路设计、组合逻辑和时序逻辑电路、存储器、总线等内容。
在微控制原理课程中,学生将学习到如何使用微控制器来设计和实现各种电子系统。
这些系统包括具有不同功能的控制器、传感器、执行器等。
学生还将学习到如何使用汇编语言和高级语言来编写程序,如C语言和C++语言等。
此外,微控制原理还介绍了一些重要的应用领域,如工业自动化、汽车电子控制系统、嵌入式系统、医疗设备、家用电器等。
这些领域需要高度可靠和安全的电子系统,因此对于学生来说,掌握微控制原理非常重要。
总之,微控制原理作为一门重要的课程,对于电子工程和计算机科学学生来说具有重要的意义。
它可以为学生提供必要的知识和技能,让他们更好地理解和掌握现代电子技术,并为他们的职业发展奠定基础。
- 1 -。
机电一体化2024字论文汇编3篇

机电一体化2024字论文汇编3篇【篇一】机电一体化2024字论文【摘要】目前,以现代水平所包含在内的工业加工以及生产和机电一体化设备是密切相关的,生产部门对机电一体化的加工需要和电机设备控制保护之间的问题也日益清晰化,所以需要更加注重机电一体化中电机设备的控制及保护措施.在分析机电一体化应用设备时,应增强对电机设备控制和防护.【关键词】机电一体化电机设备控制保护问题分析伴随经济的发展和进步,我国工业技术也在日渐创新,企业生产经营所需生产要素供给量和产品市场需求量对机电一体化应用范畴的扩增使电子机械设备的投置运用率大领域提高,但是却忽略了电子机械设备的控制及相关保护措施.机电一体化中电机设备的控制及保护措施主要以电子装置来延伸机械工作时间,而在控制方面及保护方面有技术以及工作人员技能等相关问题的阻碍,所以需要我们采取相关措施来针对现有问题去解决.一、關于机电一体化发展路程的概述机电一体化技术是有机械技术和微电子技术等融合而成的新型科学技术,是现代自动化生产设备不可或缺的一部分.机电一体化的理念在我国现代化技术发展中起着重要推进作用,引领工业化企业走向发展巅峰.但是,由于技术设备缺乏专业性管理,导致机电一体化电机设备在控制和保护方面都存在问题.随着经济发展的不断推进,相关事业经营场所对机电产品的功能特性也在不断进行完备.在经历过两次世界性战争以后,人们发掘出了电子产品的应用价值,此次战争的发生扩大了机电产品的使用范围,而且在经济繁荣层面上也起到了推进效果.随着电子技术和通信产品的不断研发,控制技术产品以及电子技术产品也在日益走向发展趋势.这种发展形式为现代科技产品机电一体化的成长铺垫了稳定基石.二、电机设备的控制和保护问题(一)电机设备控制保护装备问题在机械电子一体化中,关于电机控制和保护措施需要我们不断探究问题来研究相关解决方式.科学技术的不断创新给电机设备也会带来相关阻碍.例如电机控制保护设备中电机多次发生技术故障,其中以井下电机为例,它是对井下工作人员安全问题的窥测,从技术层面探究,电机出现技术故障的主要因素在于电机的磁电功能以及热电功能存在故障问题.随着经济的发展和时代推移,电子机械化设备逐渐代替了廉价劳动力,一些生产过程都离不开电子机械产品的辅助,所以关于机械电子设备的安全要素应引起相关管理部分的重视并对相关保护工作做到完善处理.如果机械设备中的电流以及电压出现变动时,就会引发电子机械设备相关安全隐患问题,这样就减少了设备的使用时间值.(二)电机设备耗电问题在现代化工业生产及加工中所采用的自动化电子机械设备比较容易存在设备线路中断以及电子机械设备功率过大而导致出现超负荷工作的相关故障问题.而这种故障问题,在大部分工业生产经营活动中企业缺乏相关重视程度,只是关注电子机械运作过程中的受损程度,而忽视电子机械的耗电功能作用.在工业化加工生产过程中对电子机械耗电量的忽略会造成大量电能的耗损,这样使企业生产利润遭受损失,对企业的发展进步是有阻碍性的,因此关于企业电子机械设备耗电问题应得到企业相关注重,例如企业安装一些节约电能的设备或者利用技术改革在电子机械设备中得到运用研发节电设备从而降低电能消耗,保证公司及企业生产利润的问题.三、电机设备的控制和保护措施(一)电机开关和速度控制电子机械设备的控制部分包含单片工作机、波声发生器、输入输出通道、整流板块以及转换板块、检测故障设备和警报电路设备组合而成的.在电子机械设备一体化形式中,关于设备应用过程,是需要以电压和开关的地方将三相电子路径通过转换板块转化后,由单片机输出才能够正常使用,在此过程中,电流需要经过波声发生器来控制电流进入的过程,使波声在光电作用中向外输出,来达到对应板块中.对此电机开关和速度需要相关措施进行控制,例如电机的双环是指速度以及位置.速度方面主要以电子机械设备的运作速度和位置定位预想速率进行的相关比对,并依靠速度转换器来对波音发生器的频率进行控制,来实现对电子机械转动速度进行控制并和转换;位置方面是以电子机械设备的位置速率进行调节,并依靠波音发生器对预测的速率进行调节.由于电子机械设备中流量开关在正常运作形态中分为速度下降、速度均匀以及速度增加这三个阶段,而且在每个过程中关于速度及速度时间和速度位置的调节都有变动特征,所以关于电子机械设备的开关机速度的相关调节,需要对现实开关和预测开关进行横向方位的对照.这种方式方法对电子机械设备中固定速度和下降速度进行调节,从而增强电子机械设备的运行速率.(二)电机设备保护装备的控制依照安全问题来考虑电子机械设备的装置,需求安装电子机械一体化设备中的电子机械保护装备.例如机械电子设备在运用过程中特别容易出现机械损坏等相关故障问题,其主要因素在于变频器的输出电流以及电压的变换移动.在正常情况下电流和电压调节都不足以适应机械电子设备一体化当中对于保护措施的需求,所以装置需要运用机械电子一体化设备中的保护性能作用,并要依靠其对电子机械设备中电流的流动大小值来应对反应效果.例如使用电流感应器对三相电流做检验和测量,并依靠输出电压对电子机械的控制和保护装备做出检验和测量,来实现对电压和电流频率的高效调节,从而加强电子机械设备的工作效果.四、结语通过本文的分析,现代科技水平中的工业化加工及生产是以机电一体化为主的,因此我们应该更加注重对机电设备的防护及控制.为了能够高效的体现机电一体化设备的应用效果,我们需要以先进的科学技术做指导对机电一体化电子机械设备不断进行改革并加以完备,以避免电子机械出现安全隐患,价值应用不足,能量消耗过大以及环境污染等问题.注重机械设备保护控制问题,有利于机电一体化技术的实施和发展,能够促进企业的成长,对社会利益也有所关联.所以希望相关企业要广泛重视对机电一体化的控制及保护问题,也希望本文所提出的相关针对性对策能够对企业发展有所帮助.【篇二】机电一体化2024字论文一、行业与劳动力市场需求随着科技的发展,伴随工业自动化的提高,机电产品技术日新月异,加之机电产品的普及和科技含量的提高,机电技术应用行业从业人员势必从数量上有很大的增长和素质上有更高的要求,当然机电技术应用行业从业人员的竞争也会日趋激烈,市场呼唤更多高素质的机电技术应用人才。
《现代管理专题》案例汇编(15秋工商管理本科)
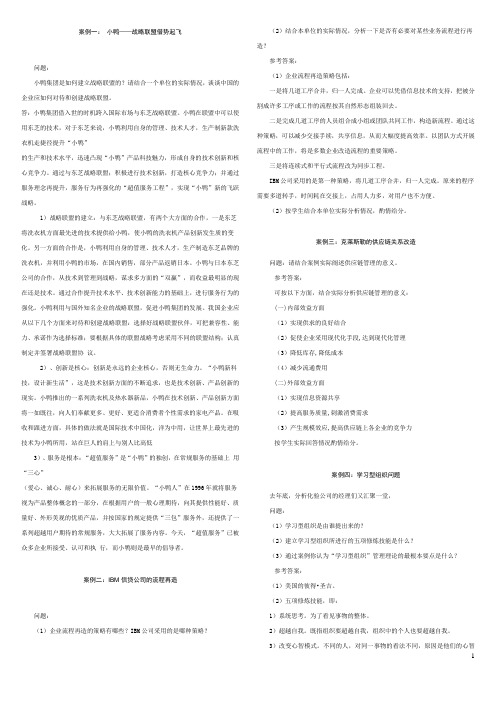
案例一:小鸭——战略联盟借势起飞问题:小鸭集团是如何建立战略联盟的?请结合一个单位的实际情况,谈谈中国的企业应如何对待和创建战略联盟。
答:小鸭集团借入世的时机跨入国际市场与东芝战略联盟。
小鸭在联盟中可以使用东芝的技术,对于东芝来说,小鸭利用自身的管理、技术人才,生产制新款洗衣机走捷径提升“小鸭”的生产和技术水平,迅速凸现“小鸭”产品科技魅力,形成自身的技术创新和核心竞争力。
通过与东芝战略联盟;积极进行技术创新,打造核心竞争力;并通过服务理念再提升,服务行为再强化的“超值服务工程”,实现“小鸭”新的飞跃战略。
1)战略联盟的建立:与东芝战略联盟,有两个大方面的合作,一是东芝将洗衣机方面最先进的技术提供给小鸭,使小鸭的洗衣机产品创新发生质的变化。
另一方面的合作是,小鸭利用自身的管理、技术人才,生产制造东芝品牌的洗衣机,并利用小鸭的市场,在国内销售,部分产品返销日本。
小鸭与日本东芝公司的合作,从技术到管理到战略,谋求多方面的“双赢”,而收益最明显的现在还是技术。
通过合作提升技术水平、技术创新能力的基础上,进行服务行为的强化。
小鸭利用与国外知名企业的战略联盟,促进小鸭集团的发展。
我国企业应从以下几个方面来对待和创建战略联盟:选择好战略联盟伙伴,可把兼容性、能力、承诺作为选择标准;要根据具体的联盟战略考虑采用不同的联盟结构;认真制定并签署战略联盟协议。
2)、创新是核心:创新是永远的企业核心,否则无生命力。
“小鸭新科技,设计新生活”,这是技术创新方面的不断追求,也是技术创新、产品创新的现实。
小鸭推出的一系列洗衣机及热水器新品,小鸭在技术创新、产品创新方面将一如既往,向人们奉献更多、更好、更适合消费者个性需求的家电产品。
在吸收和跟进方面,具体的做法就是国际技术中国化,洋为中用,让世界上最先进的技术为小鸭所用,站在巨人的肩上与别人比高低3)、服务是根本:“超值服务”是“小鸭”的独创,在常规服务的基础上用“三心”(爱心、诚心、耐心)来拓展服务的无限价值。
单片机技术及应用技能训练

单片机技术及应用技能训练单片机技术是指利用一种集成电路中的微处理器,实现各种功能的方法和技术。
单片机通常包括中央处理器、内存、输入输出接口、定时器/计数器和各种外设,主要用于控制和处理各种电子设备。
单片机技术在现代电子设备中具有广泛的应用,如家用电器、工业自动化、通信设备等。
以下是单片机技术及应用技能训练方面的一些内容:1. 单片机基础知识:了解单片机的结构、工作原理、指令系统、寄存器和输入输出端口等基本知识。
2. 单片机编程:掌握单片机的汇编语言或高级语言编程技术,学会使用开发工具进行单片机程序的编写、调试和下载。
3. 硬件电路设计:学习单片机周边电路的设计,包括电源电路、复位电路、时钟电路、输入输出电路等。
了解如何选择和使用各种外设,如光电传感器、温度传感器、继电器等。
4. 接口技术:熟悉单片机与外部器件的数据、控制和时序接口。
学会使用串口、并行口、I2C、SPI等通信协议进行数据交换。
5. 中断技术:了解中断的原理和使用方法,学会编写中断服务程序,实现实时响应和自动控制。
6. 定时器/计数器:学习定时器/计数器的工作原理和编程方法,掌握定时、计数等时间相关应用。
7. 存储器管理:了解存储器的类型、容量和组织结构,学会使用EEPROM、Flash 等非易失性存储器进行数据的存储和读取。
8. 其他应用技能:了解单片机在各个领域的应用,如电机控制、显示技术、通信技术等。
学会设计和实现相关的应用电路和程序。
单片机技术及应用技能训练通常通过理论学习和实验实践相结合的方式进行。
在理论学习方面,学生可以通过课堂授课、教材、网络资源等途径,系统地学习单片机的相关知识。
在实验实践方面,学生可以利用实验平台进行实验操作,根据实验指导书或教师的指导,完成各种实验项目,进一步加深对单片机技术的理解和掌握。
实训项目通常包括单片机基本编程、中断处理、定时器应用、串行通信、ADC/DAC数据转换等。
学生需要根据实训要求,完成实验设计、电路连接、程序编写和实验调试等工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《现代控制技术基础》课程习题集西南科技大学成人、网络教育学院版权所有习题【说明】:本课程《现代控制技术基础》(编号为03206)共有单选题,多项选择题,计算题,简答题等多种试题类型,其中,本习题集中有[]等试题类型未进入。
一、单选题1. 自动控制系统按输入量变化与否来分类,可分为( A )A、随动系统与自动调整系统B、线性系统与非线性系统C、连续系统与离散系统D、单输入-单输出系统与多输入-多输出系统2.自动控制系统按系统中信号的特点来分类,可分为( C )A、随动系统与自动调整系统B、线性系统与非线性系统C、连续系统与离散系统D、单输入-单输出系统与多输入-多输出系统3.普通机床的自动加工过程是( C )A、闭环控制B、伺服控制C、开环控制D、离散控制4.形成反馈的测量元器件的精度对闭环控制系统的精度影响( B )A、等于零B、很大C、很小D、可以忽略5.自动控制系统需要分析的问题主要有( A )A、稳定性、稳态响应、暂态响应B、很大C、很小D、可以忽略6.对积分环节进行比例负反馈,则变为( D )A、比例环节B、微分环节C、比例积分环节D、惯性环节7.惯性环节的传递函数是( A )A 、1)(+=Ts K s G B 、K s G =)( C 、Tss G 1)(= D 、Ts s G =)( 8. 比例环节的传递函数是( B )A 、1)(+=Ts K s G B 、K s G =)( C 、Tss G 1)(= D 、Ts s G =)( 9. 微分环节的传递函数是( D )A 、1)(+=Ts K s G B 、K s G =)( C 、Tss G 1)(= D 、Ts s G =)( 10. 积分环节的传递函数是(C )A 、1)(+=Ts K s G B 、K s G =)( C 、Tss G 1)(= D 、Ts s G =)( 11. 对于物理可实现系统,传递函数分子最高阶次m 与分母最高阶次n 应保持( C )A 、n m <B 、n m >C 、n m ≤D 、n m ≥12. f (t )=0.5t +1,则L [f (t )]=( B )A 、s s 15.02+B 、s s1212+ C 、25.0s D 、s s+221 13. f (t )=2t +1,则L [f (t )]=( B )A 、s s 122+B 、s s122+ C 、22s D 、s s+221 14. 通常把反馈信号与偏差信号的拉普拉斯变换式之比,定义为( C )A 、闭环传递函数B 、前向通道传递函数C 、开环传递函数D 、误差传递函数15. 在闭环控制中,把从系统输入到系统输出的传递函数称为( A )A 、闭环传递函数B 、前向通道传递函数C 、开环传递函数D 、误差传递函数16.单位脉冲信号的拉氏变换为( B )A、L[1(t)]=1/sB、L[δ(t)]=1C、L[t•1(t)]=1/s2D、L[t2/2]=1/s317.单位阶跃信号的拉氏变换为( A )A、L[1(t)]=1/sB、L[δ(t)]=1C、L[t•1(t)]=1/s2D、L[t2/2]=1/s318.单位斜坡信号的拉氏变换为( C )A、L[1(t)]=1/sB、L[δ(t)]=1C、L[t•1(t)]=1/s2D、L[t2/2]=1/s319.对于稳定的系统,时间响应中的暂态分量随时间增长趋于( D )A、1B、无穷大C、稳态值D、零20.当稳定系统达到稳态后,稳态响应的期望值与实际值之间的误差,称为( B )A、扰动误差B、稳态误差C、暂态误差D、给定偏差21.对一阶系统的单位阶跃响应,当误差范围取2%时,调整时间为( A )A、t s=4τB、t s=3τC、t s=2τD、t s=τ22.对一阶系统的单位阶跃响应,当误差范围取5%时,调整时间为( B )A、t s=4τB、t s=3τC、t s=2τD、t s=τ23.根据线性定常系统稳定的充要条件,必须全部位于s平面左半部的为系统全部的( C )A、零点B、临界点C、极点D、零点和极点24.对二阶系统当1<ξ时,其为( B )0<A、过阻尼系统B、欠阻尼系统C、零阻尼系统D、临界阻尼系统25.根据劳斯稳定判据,系统具有正实部极点的个数应等于劳斯表中第1列元素( A )A、符号改变的次数B、为负值的个数C、为正值的个数D、为零的次数26.根据劳斯稳定判据,系统具有正实部极点的个数应等于劳斯表中第1列元素( B )A、符号改变的次数B、为负值的个数C、为正值的个数D、为零的次数27.典型二阶系统的开环传递函数为( C )A 、阻尼振荡角频率B 、阻尼特性C 、时间常数D 、无阻尼固有频率28. 时间常数T 的大小反映了一阶系统的( A )A 、惯性的大小B 、输入量的大小C 、输出量的大小D 、准确性29. 典型二阶系统的特征方程为( C )A 、022=+s s n ξωB 、0222=++n n s ωξωC 、0222=++n n s s ωξω D 、022=++n n s s ωξω30. 调整时间t s 表示系统暂态响应持续的时间,从总体上反映系统的(C ) A 、稳态误差 B 、瞬态过程的平稳性C 、快速性D 、阻尼特性31. 伯德图低频段渐近线是34dB 的水平直线,传递函数是( A )A 、1250+s B 、5500+sC 、s 50D 、225s32. 过40=c ω且斜率为-20dB/dec 的频率特性是( C )A 、4040+ωj B 、)40(40+ωωj jC 、)101.0(40+ωωj j D 、)101.0(402+-ωωj33. 在ω=10 rad/s 处,相角滞后90° 的传递函数是( D )A 、1020+sB 、20500+sC 、11010502++s sD 、11.001.0502++s s34. 放大器的对数增益为14dB ,其增益K 为( B )A 、2B 、5C 、10D 、5035. 过40=c ω且斜率为-40dB/dec 的频率特性是( D )A 、4040+ωj B 、)40(40+ωωj jC 、)101.0(40+ωωj jD 、)101.0(16002+-ωωj 36. 下列传递函数中不是..最小相位系统的是( C ) A 、1020+s B 、20500+-s C 、156502--s s D 、451502+++s s s 37. 伯德图低频段渐近线是20dB 的水平直线,传递函数是( D )A 、12100+sB 、5500+s C 、250+s D 、110+s 38. 在ω=20 rad/s 处,相角滞后45° 的传递函数是( B )A 、1220+s B 、20500+s C 、12050+s D 、110+s 39. 系统的截止频率愈大,则( B )A 、对高频噪声滤除性能愈好B 、上升时间愈小C 、快速性愈差D 、稳态误差愈小40. 进行频率特性分析时,对系统的输入信号为( B )A 、阶跃信号B 、正弦信号C 、脉冲信号D 、速度信号41. 积分环节的相角为( A )A 、-90ºB 、90ºC 、-180ºD 、180º42. 系统开环奈氏曲线与负实轴相交时的频率称为( B )A 、幅值交界频率B 、相位交界频率C 、幅值裕量D 、相位裕量43. 在具有相同幅频特性的情况下,相角变化范围最小的是( C )A 、快速响应系统B 、非最小相位系统C 、最小相位系统D 、高精度控制系统44. 微分环节的相角为( B )A 、-90ºB 、90ºC 、-180ºD 、180º45. 系统开环奈氏曲线与单位圆相交时的频率称为( A )A 、幅值交界频率B 、相位交界频率C 、幅值裕量D 、相位裕量46. 串联校正装置11)(21++=s T s T s G c ,若其为滞后校正,则应该( B ) A 、T 1>T 2 B 、T 1<T 2C 、T 1=T 2D 、T 1≠T 247. 若在系统的前向通路上串联比例-微分(PD )校正装置,可使( A )A 、相位超前B 、相位滞后C 、相位不变D 、快速性变差48. 硬反馈指的是反馈校正装置的主体是( C )A 、积分环节B 、惯性环节C 、比例环节D 、微分环节49. 串联校正装置11)(21++=s T s T s G c ,若其为超前校正,则应该( B ) A 、T 1>T 2 B 、T 1<T 2C 、T 1=T 2D 、T 1≠T 250. 若在系统的前向通路上串联比例-积分(PI )校正装置,可使( B )A 、相位超前B 、相位滞后C 、相位不变D 、快速性变好51. 软反馈指的是反馈校正装置的主体是( D )A 、积分环节B 、惯性环节C 、比例环节D 、微分环节52. 校正装置的传递函数是101.011.0++s s ,该校正是( A ) A 、比例微分校正 B 、近似比例积分校正C 、比例积分校正D 、比例积分微分校正53. 比例-积分(PI )校正能够改善系统的( C )A 、快速性B 、动态性能C 、稳态性能D 、相对稳定性54. 硬反馈在系统的动态和稳态过程中都起( D )A 、超前校正作用B 、滞后校正作用C 、滞后-超前校正作用D 、反馈校正作用55. PD 校正器又称为( B )A 、比例-积分校正B 、比例-微分校正C 、微分-积分校正D 、比例-微分-积分校正56. 闭环采样系统的稳定的充分必要条件为:系统特征方程的所有根均在Z 平面的( D )A 、左半平面B 、右半平面C 、单位圆外D 、单位圆内57. 采样控制系统中增加的特殊部件是( A )A 、采样开关和采样信号保持器B 、采样开关和模数转换器C 、采样信号保持器和数模转换器D 、采样开关和信号发生器58. 采样系统的闭环脉冲传递函数的极点位于单位圆内的正实轴上,则其暂态分量( B )A 、为衰减振荡函数B 、按指数规律衰减C 、是发散的D 、衰减越慢59. 单位阶跃函数的Z 变换是( C )A 、1B 、z1 C 、1-z z D 、zz 1- 60. 采样信号保持器的作用是将采样信号恢复为( A )A 、连续信号B 、离散信号C 、输出信号D 、偏差信号61. 采样系统的闭环脉冲传递函数的极点位于单位圆内的负实轴上,则其暂态分量( A )A 、为衰减振荡函数B 、按指数规律衰减C 、是发散的D 、衰减越慢62. 单位脉冲函数的Z 变换是( A )A 、1B 、z1 C 、1-z z D 、zz 1- 63. 采样控制系统的闭环脉冲传递函数的极点距z 平面坐标原点越近,则衰减速度( B )A 、越慢B 、越快C 、变化越慢D 、变化越快64. 为了使采样控制系统具有比较满意的暂态响应性能,闭环极点最好分布在( D )A 、单位圆外的左半部B 、单位圆外的右半部C 、单位圆内的左半部D 、单位圆内的右半部65. 在工程实际中,为了保证采样过程有足够的精确度,常取ωs 为( C )A 、2~4ωmaxB 、3~5ωmaxC 、5~10ωmaxD 、8~12ωmax66. 状态变量描述法不仅能反映系统输入和输出的关系,而且还能提供系统( D )A 、全部变量的信息B 、外部各个变量的信息C 、线性关系D 、内部各个变量的信息67.能观标准型的系统矩阵是能控标准型系统矩阵的( C )A、对称矩阵B、逆阵C、转置D、单位阵68.约当标准型的系统矩阵是对角线阵,对角线元素依次为( C )A、零点B、开环极点C、系统特征根D、各部分分式的系数69.在现代控制理论中采用的状态变量描述法,又称为( D )A、全部变量描述法B、外部描述法C、线性描述法D、内部描述法70.能观标准型的控制矩阵是能控标准型输出矩阵的( C )A、对称矩阵B、逆阵C、转置D、单位阵71.线性定常系统状态能控的充分必要条件是,其能控性矩阵的( B )A、行数为nB、秩为nC、列数为nD、行列式值为n72.系统状态变量的个数等于系统( C )A、全部变量的个数B、外部变量的个数C、独立变量的个数D、内部变量的个数73.能观标准型的输出矩阵是能控标准型控制矩阵的( C )A、对称矩阵B、逆阵C、转置D、单位阵74.线性定常系统状态完全能观的充分和必要条件是,其能观性矩阵的( B )A、行数为nB、秩为nC、列数为nD、行列式值为n75.一个状态变量为n维的单输入,单输出系统,下面说法正确的是( A )A、系数阵A为n×n维B、控制阵B为1×n维C、输出阵C为n×1维D、A,B,C三个阵均为n×n维二、多项选择题76.控制系统中常用的典型环节有( ABCDE)A、比例环节B、惯性环节C、微分环节D、积分环节E、振荡环节77.控制系统方框图常用的联接方式有(BCE )A、直接联接B、串联联接C、并联联接D、间接联接E、反馈联接78.闭环控制系统组成通道包括( CD )A、直接通道B、串联通道C、前向通道D、反馈通道E、并联通道79.建立自动控制系统数学模型的方法主要有( AB )A、机理分析法B、实验辨识法C、时域分析法D、频域分析法E、根轨迹法80.经典控制理论常用的分析方法主要有( CDE )A、机理分析法B、实验辨识法C、时域分析法D、频域分析法E、根轨迹法81.常用的时域性能指标有( ABCDE )A、稳态误差B、上升时间C、峰值时间D、最大超调量E、调整时间82.二阶系统按照阻尼比的不同取值分为( BCDE )A、等阻尼状态B、欠阻尼状态C、过阻尼状态D、临界阻尼状态E、零阻尼状态83.反映控制系统快速性的时域性能指标有( BCE )A、稳态误差B、上升时间C、峰值时间D、最大超调量E、调整时间84.控制系统时域分析时常用的典型输入信号包括( ABCD )A、阶跃函数B、斜坡函数C、抛物线函数D、脉冲函数E、正弦函数85.典型二阶系统的数学模型中,主要的关键参数包括( BD )A、放大系数B、阻尼比C、开环增益D、无阻尼固有频率E、阻尼振荡角频率86.系统波德图包含的曲线,分别表示为( AE )A、幅频特性B、频率特性C、实频特性D、虚频特性E、相频特性87.反映系统瞬态响应的速度和相对稳定性的频域性能指标有( CD )A、最大超调量B、调整时间C、剪切频率D、谐振峰值E、截止频率88.常用的频域性能指标有( ABCDE )A、截止频率和带宽B、相位裕量C、幅值裕量D、谐振频率E、谐振峰值89.通过系统的频率特性可以分析系统的( ABC )A、稳定性B、暂态性能C、稳态性能D、振荡性能E、发散性能90.系统频率特性的图形表示方法主要有( BC )A、阶跃响应图B、极坐标图C、伯德图D、脉冲响应图E、根轨迹图91.校正装置按在控制系统中的位置和连接方式划分为( ABCD )A、串联校正B、反馈校正C、顺馈校正D、干扰补偿E、超前校正92.工程上普遍采用的有源串联校正装置,主要的校正形式有( BCD )A、反馈校正B、PID校正C、PI校正D、PD补偿E、比例反馈校正93.反馈校正的主要方式有( BC )A、比例积分校正B、比例反馈校正C、微分反馈校正D、无源校正E、有源校正94.在主反馈回路之内采用的校正方式有( AB )A、串联校正B、反馈校正C、顺馈校正D、干扰补偿E、PID校正95.通常作为反馈控制系统的附加校正而组成符合控制系统所采用的校正方式有( CD )A、串联校正B、反馈校正C、顺馈校正D、干扰补偿E、PID校正96.系统状态模型中的A、B、C三个矩阵分别称为( BCD )A、状态变量B、系统矩阵C、控制矩阵D、输出矩阵E、系数向量97.三种标准型状态模型分别为( ABE )A、能控标准型B、能观标准型C、状态标准型D、稳定标准型E、约当标准型98.用状态模型描述控制系统时,会遇到的问题是( CD )A、稳定性B、快速性C、能控性D、能观性E、准确性99.现代控制理论中的重要概念包括( DE )A、最优控制B、最优估计C、快速性D、能控性E、能观性100.现代控制理论中的卡尔曼准则主要包括( CE )A、最优控制准则B、最优估计准则C、能控性判别准则D、快速性准则E、能观性判别准则三、计算题101.求如图所示系统的微分方程,图中x(t)为输入位移,y(t)为输出位移。