matlab课后习题答案第四章
电机与拖动基础及MATLAB仿真习题答案(第四章)
电机与拖动基础及MATLAB仿真习题答案(第四章)4-14 ⼀台直流电动机技术数据如下:额定功率PN=40kW ,额定电压UN=220V ,额定转速nN=1500r/min ,额定效率η=87.5%,求电动机的额定电流和额定负载时的输⼊功率?解:(1)额定电流(2)输⼊功率4-15 ⼀台直流发电机技术数据如下:额定功率PN=82kW ,额定电压UN=230V ,额定转速nN=970r/min ,额定效率η=90%,求发电机的额定电流和额定负载时的输⼊功率?解:(1)额定电流(2)输⼊功率4-16 已知⼀台直流电机极对数p=2,槽数Z 和换向⽚数K 均等于22,采⽤单叠绕组。
试求:(1)绕组各节距;(2)并联⽀路数。
解:(1)第⼀节距5424222y 1=-=±=εp z ,为短距绕组。
单叠绕组的合成节距及换向器节距均为1,即1y ==k y第⼆节距415y 12=-=-=y y(2)并联⽀路数等于磁极数,为4。
4-17 已知直流电机极数2p=6,电枢绕组总导体数N=400,电枢电流Ia=10A ,⽓隙每极磁通Φ=2.1×10-2Wb ,试求:(1)采⽤单叠绕组时电枢所受电磁转矩;(2)绕组改为单波保持⽀路电流ia 不变时的电磁转矩。
解: 电枢绕组为单叠绕组时,并联⽀路对数a=p=3,电磁转矩 m N I a pN T a ?==Φ=38.1310021.0314.3240032π如果把电枢绕组改为单波绕组, 保持⽀路电流a i 的数值不变,则电磁转矩也不变,仍为 13.369m N ?,因为⽆论是叠绕组还是波绕组,所有导体产⽣的电磁转矩的⽅向是⼀致的, 保持⽀路电流a i 不变,就保持了导体电流不变,也就保持了电磁转矩不变。
也可以⽤计算的⽅法: 单叠绕组时并联⽀路数为6,⽀路电流 A I i a a 6106==改为单波绕组, 保持⽀路电流a i 的数值不变,仍为A 610,⽽并联⽀路数为2 (a=1), 电枢电流A i I a a 3102== 电磁转矩 m N T ?==38.13310021.0114.324003。
MATLAB课后习题集附标准答案
第2章MATLAB概论1、与其他计算机语言相比较,MA TLAB语言突出的特点是什么?答:起点高、人机界面适合科技人员、强大而简易的作图功能、智能化程度高、功能丰富,可扩展性强.2、MA TLAB系统由那些部分组成?答:开发环境、MATLAB数学函数库、MATLAB语言、图形功能、应用程序接口3、安装MATLAB时,在选择组件窗口中哪些部分必须勾选,没有勾选的部分以后如何补安装?答:在安装MATLAB时,安装内容由选择组件窗口中各复选框是否被勾选来决定,可以根据自己的需要选择安装内容,但基本平台(即MATLAB选项)必须安装.第一次安装没有选择的内容在补安装时只需按照安装的过程进行,只是在选择组件时只勾选要补装的组件或工具箱即可.4、MATLAB操作桌面有几个窗口?如何使某个窗口脱离桌面成为独立窗口?又如何将脱离出去的窗口重新放置到桌面上?答:在MATLAB操作桌面上有五个窗口,在每个窗口的右下角有两个小按钮,一个是关闭窗口的Close 按钮,一个是可以使窗口称为独立的Undock按钮,点击Undock按钮就可以使该窗口脱离桌面称为独立窗口,在独立窗口的view菜单中选择Dock,菜单项就可以将独立的窗口重新防止的桌面上.5、如何启动M文件编辑/调试器?答:在操作桌面上选择“建立新文件”或“打开文件”操作时,M文件编辑/调试器将被启动.在命令窗口中键入edit命令时也可以启动M文件编辑/调试器.6、存储在工作空间中的数组能编辑吗?如何操作?答:存储在工作空间的数组可以通过数组编辑器进行编辑:在工作空间浏览器中双击要编辑的数组名打开数组编辑器,再选中要修改的数据单元,输入修改内容即可.7、命令历史窗口除了可以观察前面键入的命令外,还有什么用途?答:命令历史窗口除了用于查询以前键入的命令外,还可以直接执行命令历史窗口中选定的内容、将选定的内容拷贝到剪贴板中、将选定内容直接拷贝到M文件中.8、如何设置当前目录和搜索路径,在当前目录上的文件和在搜索路径上的文件有什么区别?答:当前目录可以在当前目录浏览器窗口左上方的输入栏中设置,搜索路径可以通过选择操作桌面的file菜单中的Set Path菜单项来完成.在没有特别说明的情况下,只有当前目录和搜索路径上的函数和文件能够被MATLAB运行和调用,如果在当前目录上有与搜索路径上相同文件名的文件时则优先执行当前目录上的文件,如果没有特别说明,数据文件将存储在当前目录上.9、在MA TLAB中有几种获得帮助的途径?答:(1)帮助浏览器:选择view菜单中的Help菜单项或选择Help菜单中的MATLAB Help菜单项可以打开帮助浏览器.(2)help命令:在命令窗口键入“help”命令可以列出帮助主题,键入“help 函数名”可以得到指定函数的在线帮助信息.(3)lookfor命令:在命令窗口键入“lookfor 关键词”可以搜索出一系列与给定关键词相关的命令和函数.(4)模糊查询:输入命令的前几个字母,然后按Tab键,就可以列出所有以这几个字母开始的命令和函数.注意:lookfor和模糊查询查到的不是详细信息,通常还需要在确定了具体函数名称后用help命令显示详细信息.第3章 MATLAB 数值运算3.1在MA TLAB 中如何建立矩阵⎥⎦⎤⎢⎣⎡194375,并将其赋予变量a ? 答:在Command Window 窗口输入操作:>> a=[5 7 3;4 9 1]3.2有几种建立矩阵的方法?各有什么优点? 答:(1)直接输入法,如a=[1 2 3 4],优点是输入方法方便简捷;(2)通过M 文件建立矩阵,该方法适用于建立尺寸较大的矩阵,并且易于修改; (3)由函数建立,如y=sin(x),可以由MATLAB 的内部函数建立一些特殊矩阵; (4)通过数据文件建立,该方法可以调用由其他软件产生数据.3.3在进行算术运算时,数组运算和矩阵运算各有什么要求?答:进行数组运算的两个数组必须有相同的尺寸.进行矩阵运算的两个矩阵必须满足矩阵运算规则,如矩阵a 与b 相乘(a*b )时必须满足a 的列数等于b 的行数.渗釤呛俨匀谔鱉调硯錦。
Matlab学习教程 第四章(4)上机练习
第4章图形处理功能1 内容简介基本内容主要包括:(1)二维图形(2)三维图形(3)图形处理的基本技术2 达到的目标(1)掌握二维图形的绘制。
(2)掌握三维图形的绘制。
(3)掌握图形处理的基本技术3 具体内容3.1 二维图形3.1.1 基本绘图命令(1)当plot函数仅有一个输入变量例4-1y=[5 2 3 8 5]; %y 行矩阵plot(y) %一条线例4-2y=[5 2 3 8 5;2 4 3 1 5;1 1 1 1 1]; %y 矩阵plot(y) %5条线,等于矩阵的列数(2)当plot函数有两个输人变量例4-3x=0:0.01*pi:pi;y=sin(x).*cos(x);plot(x,y)例4-3x=0:0.01*pi:pi;y=[sin(x);cos(x); sin(x).*cos(x)];plot(x,y)例4-4x1=0:0.01*pi:pi;x2=pi:0.01*pi:2*pi;x=[x1' x2'];y=[sin(x1') cos(x2')];plot(x,y)例4-5x1=1:5;x2=6:10;y1=x1;y2=2*x2;plot([x1;x2],[y1;y2])%plot([x1' x2'],[y1' y2'])(3)当plot函数有三个输入变量时MATLAB语言中提供的对曲线的线型、颜色以及标识的控制符如表4.l所示。
例4-6 绘制带有显示属性设置的二维图形。
x=0.5*pi: 0.1*pi:2*pi;y=sin(x);z=cos(x);plot (x, y, '--ko', x, z, '-. r*')3.1.2 特殊的二维图形函数(1)特殊坐标系的二维图形函数(a)对数坐标例4-7 绘制X坐标为对数坐标的二维图形。
x=0.5*pi: 0.1*pi:2*pi;y=sin(x);semilogx (x, y, '-ro')(b)极坐标例4-8绘制极坐标下的二维图形。
(完整版)汽车理论课后作业答案MATLAB
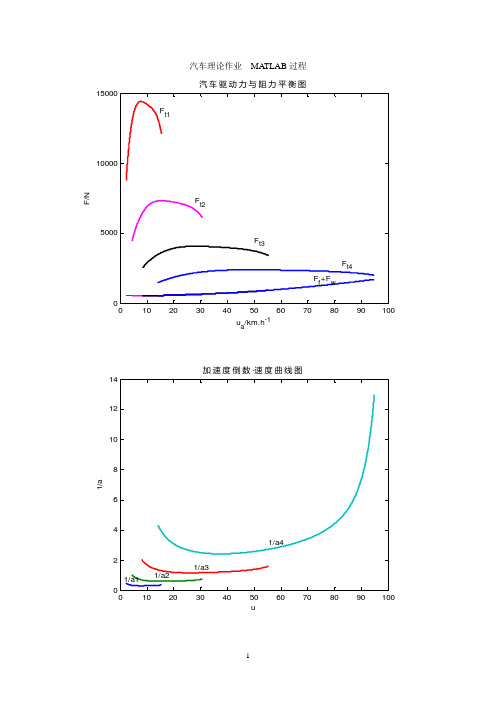
汽车理论作业 MA TLAB 过程010203040506070809010050001000015000汽车驱动力与阻力平衡图u a /km.h -1F /N10203040506070809010002468101214加速度倒数-速度曲线图u1/a0102030405060708090100102030405060u/(km/h)P /k W汽车功率平衡图10203040506070809010012141618202224最高档等速百公里油耗曲线Ua/(km/h)Q s /L2324252627282912131415161718燃油积极性-加速时间曲线燃油经济性(qs/L)动力性--原地起步加速时间 (s t /s )源程序:《第一章》m=3880; g=9.8; r=0.367; x=0.85; f=0.013; io=5.83; CdA=2.77; If=0.218; Iw1=1.798; Iw2=3.598; Iw=Iw1+Iw2;ig=[6.09 3.09 1.71 1.00]; %变速器传动比 L=3.2; a=1.947; hg=0.9; n=600:1:4000;T=-19.313+295.27*n/1000-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000).^4; Ft1=T*ig(1)*io*x/r;%计算各档对应转速下的驱动力Ft2=T*ig(2)*io*x/r;Ft3=T*ig(3)*io*x/r;Ft4=T*ig(4)*io*x/r;u1=0.377*r*n/(io*ig(1));u2=0.377*r*n/(io*ig(2));u3=0.377*r*n/(io*ig(3));u4=0.377*r*n/(io*ig(4));u=0:130/3400:130;F1=m*g*f+CdA*u1.^2/21.15;%计算各档对应转速下的驱动阻力F2=m*g*f+CdA*u2.^2/21.15;F3=m*g*f+CdA*u3.^2/21.15;F4=m*g*f+CdA*u4.^2/21.15;figure(1);plot(u1,Ft1,'-r',u2,Ft2,'-m',u3,Ft3,'-k',u4,Ft4,'-b',u1,F1,'-r',u2,F2,'-m',u3,F3,'-k',u4,F4,'-b','LineWidth',2)title('汽车驱动力与阻力平衡图');xlabel('u_{a}/km.h^{-1}')ylabel('F/N')gtext('F_{t1}')gtext('F_{t2}')gtext('F_{t3}')gtext('F_{t4}')gtext('F_{f}+F_{w}')%由汽车驱动力与阻力平衡图知,他们无交点,u4在最大转速时达到最大umax=u4(3401)Ft1max=max(Ft1);imax=(Ft1max-m*g*f)/(m*g)disp('假设是后轮驱动');C=imax/(a/L+hg*imax/L) % 附着率delta1=1+(Iw1+Iw2)/(m*r^2)+If*ig(1)*r^2*io^2*x/(m*r^2);delta2=1+(Iw1+Iw2)/(m*r^2)+If*ig(2)*r^2*io^2*x/(m*r^2);delta3=1+(Iw1+Iw2)/(m*r^2)+If*ig(3)*r^2*io^2*x/(m*r^2);delta4=1+(Iw1+Iw2)/(m*r^2)+If*ig(4)*r^2*io^2*x/(m*r^2);a1=(Ft1-F1)/(delta1*m); %加速度a2=(Ft2-F2)/(delta2*m);a3=(Ft3-F3)/(delta3*m);a4=(Ft4-F4)/(delta4*m);h1=1./a1; %加速度倒数h2=1./a2;h3=1./a3;h4=1./a4;figure(2);plot(u1,h1,u2,h2,u3,h3,u4,h4,'LineWidth',2); title('加速度倒数-速度曲线图');xlabel('u')ylabel('1/a')gtext('1/a1')gtext('1/a2')gtext('1/a3')gtext('1/a4')%由加速度倒数-速度曲线图可知u1min=min(u1);u1max=max(u1);u2min=u1max;u2min=min(u2);u2max=max(u2);u3min=u2max;u3max=max(u3);u4min=u3max;u4max=70;x1=[];x2=[];x3=[];x4=[];y=3401;for i=1:3401;if u3(i)<=u3min;x1=[i];endendq1=max(x1);ua3=u3(q1:y);a3=h3(q1:y);for i=1:3401;if u4(i)<=u4min;x2=[i];elseif u4(i)<=u4max;x3=[i];endendq2=max(x2);q3=max(x3);ua4=u4(q2:q3);a4=h4(q2:q3);s1=trapz(h2,u2 ); %二挡运行时间s2=trapz(ua3,a3);s3=trapz(ua4,a4);s=[s1 s2 s3];disp('积分得')t=sum(s)*1000/3600 %总时间《第二章》Pe1=Ft1.*u1./3600;%计算各档对应转速下的功率Pe2=Ft2.*u2./3600;Pe3=Ft3.*u3./3600;Pe4=Ft4.*u4./3600;P1=F1.*u1./(3600*x);%计算各档对应的各个车速下的行驶功率P2=F2.*u2./ (3600*x);P3=F3.*u3./ (3600*x);P4=F4.*u4./ (3600*x);figure(3);plot(u1,Pe1,'-r',u2,Pe2,'-m',u3,Pe3,'-k',u4,Pe4,'-b',u1,P1,'k',u2,P2,'k',u3,P3,'k', u4,P4,'k','linewidth',2);gtext('Pe1')gtext('Pe2')gtext('Pe3')gtext('Pe4')xlabel('u/(km/h)');ylabel('P/kW');title('汽车功率平衡图');n=[815 1207 1614 2012 2603 3006 3403 3804];Ua=[];Ua=0.377*r*n./(io*ig(4))ft=[];ft=m*g*f+(2.77/21.15)*Ua.^2;%计算各转速对应的各个车速下的行驶阻力Pe(1)=ft(1).*Ua(1)./(3600*x);%计算各转速对应的各个车速下的行驶阻力功率Pe(2)=ft(2).*Ua(2)./(3600*x);Pe(3)=ft(3).*Ua(3)./(3600*x);Pe(4)=ft(4).*Ua(4)./(3600*x);Pe(5)=ft(5).*Ua(5)./(3600*x);Pe(6)=ft(6).*Ua(6)./(3600*x);Pe(7)=ft(7).*Ua(7)./(3600*x);Pe(8)=ft(8).*Ua(8)./(3600*x)B0=[1326.8 1354.7 1284.4 1122.9 1141.0 1051.2 1233.9 1129.7];B1=[-416.46 -303.98 -189.75 -121.59 -98.893 -73.714 -84.478 -45.291];B2=[72.739 36.657 14.525 7.0035 4.4763 2.8593 2.9788 0.7113];B3=[-5.8629 -2.0533 -0.51184 -0.18517 -0.091077 -0.05138 -0.047449 -0.00075215];B4=[0.17768 0.043072 0.0068164 0.0018555 0.00068906 0.00035032 0.00028230-0.000038568];b1=(B0(1))+(B1(1)*Pe(1))+(B2(1)*Pe(1)^2)+(B3(1)*Pe(1)^3)+(B4(1)*Pe(1)^4);b2=(B0(2))+(B1(2)*Pe(2))+(B2(2)*Pe(2)^2)+(B3(2)*Pe(2)^3)+(B4(2)*Pe(2)^4);b3=(B0(3))+(B1(3)*Pe(3))+(B2(3)*Pe(3)^2)+(B3(3)*Pe(3)^3)+(B4(3)*Pe(3)^4);b4=(B0(4))+(B1(4)*Pe(4))+(B2(4)*Pe(4)^2)+(B3(4)*Pe(4)^3)+(B4(4)*Pe(4)^4);b5=(B0(5))+(B1(5)*Pe(5))+(B2(5)*Pe(5)^2)+(B3(5)*Pe(5)^3)+(B4(5)*Pe(5)^4);b6=(B0(6))+(B1(6)*Pe(6))+(B2(6)*Pe(6)^2)+(B3(6)*Pe(6)^3)+(B4(6)*Pe(6)^4);b7=(B0(7))+(B1(7)*Pe(7))+(B2(7)*Pe(7)^2)+(B3(7)*Pe(7)^3)+(B4(7)*Pe(7)^4);b8=(B0(8))+(B1(8)*Pe(8))+(B2(8)*Pe(8)^2)+(B3(8)*Pe(8)^3)+(B4(8)*Pe(8)^4);p=0.7;Qs=[];Qs(1)=(Pe(1)*b1)/(1.02*Ua(1).*p*g);Qs(2)=(Pe(2)*b2)/(1.02*Ua(2).*p*g);Qs(3)=(Pe(3)*b3)/(1.02*Ua(3).*p*g);Qs(4)=(Pe(4)*b4)/(1.02*Ua(4).*p*g);Qs(5)=(Pe(5)*b5)/(1.02*Ua(5).*p*g);Qs(6)=(Pe(6)*b6)/(1.02*Ua(6).*p*g);Qs(7)=(Pe(7)*b7)/(1.02*Ua(7).*p*g);Qs(8)=(Pe(8)*b8)/(1.02*Ua(8).*p*g);M=polyfit(Ua,Qs,2);UA=0.377*r*600/(ig(4)*io):1:0.377*r*4000/(ig(4)*io);%UA表示车速QS=polyval(M,UA);%QS表示油耗figure(4);plot(UA,QS,'linewidth',2);title('最高档等速百公里油耗曲线');xlabel('Ua/(km/h)');ylabel('Qs/L');《第三章》io=[5.17 5.43 5.83 6.17 6.33];Va=0.377*r*n(7)./(io.*ig(4));Ps=46.9366;disp('假设以最高档,较高转速(n取3401 ),最经济负荷(即90%负荷大约 46.9366Kw)行驶时油耗')qs=[];qs(1)=(Ps*b7)/(1.02*Va(1).*p*g);qs(2)=(Ps*b7)/(1.02*Va(2).*p*g);qs(3)=(Ps*b7)/(1.02*Va(3).*p*g);qs(4)=(Ps*b7)/(1.02*Va(4).*p*g);qs(5)=(Ps*b7)/(1.02*Va(5).*p*g);st=[ 17.5813 16.2121 14.5126 13.3775 12.9185];%加速时间:(这里以最高档〈四档〉、速度由0加速到94.93Km/h 的时间)因与题1.3第三问求法相同,这里不在累述,可直接有计算机求得:figure(5);plot(qs,st,'+','linewidth',2)hold on plot(qs,st,); gtext('5.17') gtext('5.43') gtext('5.83') gtext('6.17') gtext('6.33')title('燃油积极性-加速时间曲线'); xlabel('燃油经济性(qs/L)');ylabel('动力性--原地起步加速时间 (st/s)');《第四章》 4-31)前轴利用附着系数为:gf zh b zL +=βϕ后轴利用附着系数为: ()gr zh a zL --=βϕ1空载时:g h b L -=βϕ0=413.0845.085.138.095.3-=-⨯所以0ϕϕ>空载时后轮总是先抱死。
电机与拖动基础及MATLAB仿真习题答案(第四章)

4-14 一台直流电动机技术数据如下:额定功率PN=40kW ,额定电压UN=220V ,额定转速nN=1500r/min ,额定效率η=%,求电动机的额定电流和额定负载时的输入功率 解:(1)额定电流(2)输入功率4-15 一台直流发电机技术数据如下:额定功率PN=82kW ,额定电压UN=230V ,额定转速nN=970r/min ,额定效率η=90%,求发电机的额定电流和额定负载时的输入功率 解:(1)额定电流(2)输入功率4-16 已知一台直流电机极对数p=2,槽数Z 和换向片数K 均等于22,采用单叠绕组。
试求:(1)绕组各节距;(2)并联支路数。
解:(1)第一节距5424222y 1=-=±=εp z ,为短距绕组。
单叠绕组的合成节距及换向器节距均为1,即1y ==k y第二节距415y 12=-=-=y y(2)并联支路数等于磁极数,为4。
4-17 已知直流电机极数2p=6,电枢绕组总导体数N=400,电枢电流Ia=10A ,气隙每极磁通Φ=×10-2Wb ,试求:(1)采用单叠绕组时电枢所受电磁转矩;(2)绕组改为单波保持支路电流ia 不变时的电磁转矩。
解: 电枢绕组为单叠绕组时,并联支路对数a=p=3,电磁转矩 m N I a pN T a ⋅=⨯⨯⨯⨯⨯=Φ=38.1310021.0314.3240032π 如果把电枢绕组改为单波绕组, 保持支路电流a i 的数值不变,则电磁转矩也不变,仍A U P I N N N N 79.207875.022010403=⨯⨯==ηkWI U P N N 71.4579.2072201=⨯=⨯=A U P I N N N 5.35623010823=⨯==KW P P N 11.911==η为m N ⋅,因为无论是叠绕组还是波绕组,所有导体产生的电磁转矩的方向是一致的,保持支路电流a i 不变,就保持了导体电流不变,也就保持了电磁转矩不变。
matlab第四章课后作业解答
matlab第四章课后作业解答第四章习题解答1、求下列多项式的所有根,并进行验算。
(3)267235865x x x x-+-(4)4)32(3-+x 解:>> p=zeros(1,24); >> p(1)=5;p(17)=-6;p(18)=8;p(22)=-5; >> root=roots(p)root =0.97680.9388 + 0.2682i0.9388 - 0.2682i0.8554 + 0.5363i0.8554 - 0.5363i0.6615 + 0.8064i0.6615 - 0.8064i0.3516 + 0.9878i0.3516 - 0.9878i-0.0345 + 1.0150i-0.0345 - 1.0150i-0.4609 + 0.9458i-0.4609 - 0.9458i-0.1150 + 0.8340i-0.1150 - 0.8340i-0.7821 + 0.7376i-0.7821 - 0.7376i-0.9859 + 0.4106i-0.9859 - 0.4106i-1.0416-0.7927>> polyval(p,root)ans =1.0e-012 *-0.07120.0459 - 0.0081i0.0459 + 0.0081i-0.0419 + 0.0444i-0.0419 - 0.0444i0.0509 + 0.0929i0.0509 - 0.0929i-0.2059 + 0.0009i-0.2059 - 0.0009i-0.0340 + 0.0145i-0.0340 - 0.0145i0.1342 + 0.0910i0.1342 - 0.0910i0.0025 + 0.0027i0.0025 - 0.0027i-0.0077 + 0.4643i-0.0077 - 0.4643i-0.3548 - 0.1466i-0.3548 + 0.1466i-0.0251-0.0073(4) >> p1=[2 3];>> p=conv(conv(p1,p1),p1)-[0 0 0 4]; >> root=roots(p)root =-1.8969 + 0.6874i-1.8969 - 0.6874i-0.7063>> polyval(p,root)ans =1.0e-014 *-0.7105 - 0.6217i-0.7105 + 0.6217i6、求解下列方程组在区域1,0<<βα内的解-=+=.sin 2.0cos 7.0,cos 2.0sin 7.0βαββαα 解:以初值)5.0,5.0(),(00=βα进行求解>> fun=inline('[0.7*sin(x(1))+0.2*cos(x(2))-x(1),0.7*cos(x(1))-0.2*sin(x(2))-x(2)]');>> [x,f,h]=fsolve(fun,[0.5 0.5])Optimization terminated: first-order optimality is less than options.TolFun.x =0.5265 0.5079f =1.0e-007 *-0.1680 -0.2712h =1因而,该方程组的近似根为5079.0,5265.0==βα。
MATLAB 习题 4
MATLAB 习题第1章MATLAB R2010环境2、在命令窗口中输入:>>a=2.5>>b=5*6>>c=[a b]写出在命令窗口中的运行结果4、用“Format”命令设置数据输出格式,(format long 或format long g)将pi显示为3.14159265358979,(formatshort e)将pi显示为3.1416e+0006、在工作空间查看变量的变量名、数据结构、类型、大小和字节数,打开数组编辑器窗口修改第2题的变量c元素。
修改变量c元素:8、输入变量a=5.3,b=[1 2;3 4],在工作空间中使用who、whos、exist和clear命令,并用save 命令将变量存入“F:\exe0101.mat”文件。
A=[1,2;3,4];inv(A)rank(A)det(A)A^3[v,d]=eig(A)结果:>>ans =-2.0000 1.00001.5000 -0.5000ans =2ans =-2ans =37 5481 118v =-0.8246 -0.41600.5658 -0.9094d =-0.3723 00 5.3723 >>命令窗口图片:接上一张图片:工作空间窗口图片:第2章MATLAB数值计算1、选择和填空(1)下列变量名中的(A)是合法变量。
A. char-1,i,jB. x*y,a.1C. x\y,a1234D. end,1bcx(2)已知x为1个向量,计算其正弦函数的运算为(C)。
A. SIN(X)B. SIN(x)C. sin(x)D. sinx(3) 已知x为1个向量,计算ln(x)运算为(B)。
A. ln(x)B. log(x)C. Ln(x)D.log10(x)(4) 若a=2.4,使用取整函数得出3,则该取整函数名为(C)。
A. fixB. roundC. ceilD. floor(5) 已知a=0:4, b=1:5, 下面的运算表达式出错的为(D)。
北航Matlab教程(R2020a)习题4解答
习题41. 依照题给的模拟实际测量数据的一组t 和 )(t y 试用数值差分diff 或数值梯度gradient 指令计算)(t y ',然后把)(t y 和)(t y '曲线绘制在同一张图上,观看数值求导的后果。
(模拟数据从prob_data401.mat 取得)(提示:自变量t 采样间距过小。
)load prob_401;N=20;diff_y1=(diff(y(1:N:end)))./diff(t(1:N:end));gradient_y1=(gradient(y(1:N:end)))./gradient(t(1:N:end));t1=t(1:N:end);length(t1)plot(t,y,t1(1:end-1),diff_y1)plot(t,y,t1,gradient_y1)2. 采纳数值计算方式,画出dt tt x y x⎰=0sin )(在]10 ,0[区间曲线,并计算)5.4(y 。
(提示:cumtrapz 快捷,在精度要求不高处可用;quad 也可试。
巧用find 。
)d=0.5;tt=0:d:10;t=tt+(tt==0)*eps;y=sin(t)./t;s=d*trapz(y)ss=d*(cumtrapz(y))plot(t,y,t,ss,'r'),hold ony4_5=ss(find(t==4.5))yi=interp1(t,ss,4.5),plot(4.5,yi,'r+')3. 求函数x e x f 3sin )(=的数值积分⎰=π0 )(dx x f s ,并请采纳符号计算尝试复算。
(提示:各类数值法都可试。
)d=pi/20;x=0:d:pi;fx=exp(sin(x).^3);s=d*trapz(fx)s1=quad('exp(sin(x).^3)',0,pi)s2=quadl('exp(sin(x).^3)',0,pi)s3=vpa(int('exp(sin(x)^3)',0,pi))s4=vpa(int(sym('exp(sin(x)^3)'),0,pi))4. 用quad 求取dx x e x sin 7.15⎰--ππ的数值积分,并保证积分的绝对精度为910-。
第4章 MATLAB程序流程控制_习题答案
第4章 MATLAB程序流程控制习题4一、选择题1.下列关于脚本文件和函数文件的描述中不正确的是()。
AA.函数文件可以在命令行窗口直接运行B.去掉函数文件第一行的定义行可转变成脚本文件C.脚本文件可以调用函数文件D.函数文件中的第一行必须以function开始2.下列程序的输出结果是()。
Dy=10;if y==10y=20;elseif y>0y=30enddisp(y)A.1 B.30 C.10 D.203.有以下语句:a=eye(5);for n=a(2:end,:)for循环的循环次数是()。
CA.3 B.4 C.5 D.104.设有程序段k=10;while kk=k-1end则下面描述中正确的是()。
AA.while循环执行10次B.循环是无限循环C.循环体语句一次也不执行D.循环体语句执行一次5.有以下程序段:x=reshape(1:12,3,4);m=0;n=0;for k=1:4if x(:,k)<=6m=m+1;elsen=n+1;endend则m和n的值分别是()。
CA.6 6 B.2 1 C.2 2 D.1 26.调用函数时,如果函数文件名与函数名不一致,则使用()。
A A.函数文件名B.函数名C.函数文件名或函数名均可D.@函数名7.如果有函数声明行为“function [x,y,z]=f1(a,b,c)”,则下述函数调用格式中错误的是()。
BA.x=f1(a,b,c) B.[x,y,z,w]=f1(a,b,c)C.[x,b,z]=f1(a,y,c) D.[a,b]=f1(x,y,z)8.执行语句“fn=@(x) 10*x;”,则fn是()。
AA.匿名函数B.函数句柄C.字符串D.普通函数9.执行下列语句后,变量A的值是()。
D>> f=@(x,y) log(exp(x+y));>> A=f(22,3);A.22,3B.22 C.3 D.2510.程序调试时用于设置断点的函数是()。
matlab第四章课后答案
%Exerc ise 1(1)r oots([1 11])%Exer cise1(2)roots([3 0 -4 0 2 -1])%Exerc ise 1(3)p=zero s(1,24);p([1 17 1822])=[5 -6 8 -5];ro ots(p)%E xerci se 1(4)p1=[2 3];p2=conv(p1,p1);p3=co nv(p1, p2);p3(end)=p3(en d)-4; %原p3最后一个分量-4r oots(p3)%Exer cise2fun=inli ne('x*log(sqrt(x^2-1)+x)-sqrt(x^2-1)-0.5*x');fzer o(fun,2)%Exer cise3fun=inli ne('x^4-2^x');fplot(fun,[-2 2]);gr id on;fze ro(fu n,-1),fzer o(fun,1),f minbn d(fun,0.5,1.5)%Exe rcise 4fu n=inl ine('x*sin(1/x)','x');fp lot(f un, [-0.10.1]);x=z eros(1,10);fori=1:10, x(i)=fz ero(f un,(i-0.5)*0.01);end;x=[x,-x]%Ex ercis e 5f un=in line('[9*x(1)^2+36*x(2)^2+4*x(3)^2-36;x(1)^2-2*x(2)^2-20*x(3);16*x(1)-x(1)^3-2*x(2)^2-16*x(3)^2]','x');[a,b,c]=fso lve(f un,[0 0 0])%E xerci se 6fun=@(x)[x(1)-0.7*si n(x(1))-0.2*cos(x(2)),x(2)-0.7*cos(x(1))+0.2*sin(x(2))]; [a,b,c]=fsolv e(fun,[0.5 0.5])%E xerci se 7clear; clo se; t=0:p i/100:2*pi;x1=2+sqr t(5)*cos(t); y1=3-2*x1+sq rt(5)*sin(t);x2=3+s qrt(2)*cos(t);y2=6*sin(t);pl ot(x1,y1,x2,y2); gri d on; %作图发现4个解的大致位置,然后分别求解y1=fsolv e('[(x(1)-2)^2+(x(2)-3+2*x(1))^2-5,2*(x(1)-3)^2+(x(2)/3)^2-4]',[1.5,2])y2=fsolv e('[(x(1)-2)^2+(x(2)-3+2*x(1))^2-5,2*(x(1)-3)^2+(x(2)/3)^2-4]',[1.8,-2])y3=fsol ve('[(x(1)-2)^2+(x(2)-3+2*x(1))^2-5,2*(x(1)-3)^2+(x(2)/3)^2-4]',[3.5,-5])y4=fso lve('[(x(1)-2)^2+(x(2)-3+2*x(1))^2-5,2*(x(1)-3)^2+(x(2)/3)^2-4]',[4,-4])%Exerc ise 8(1)c lear;fun=inlin e('x.^2.*(x.^2-x-2)');fp lot(f un,[-2 2]);grid on;%作图观察x(1)=-2;x(2)=fminb nd(fu n,-1,-0.5);x(4)=fmi nbnd(fun,1,2);fun2=inlin e('-x.^2.*(x.^2-x-2)');x(3)=f minbn d(fun2,-0.5,0.5);x(5)=2feval(fun,x)%答案: 以上x(2)(4)是局部极小,x(1)(3)(5)是局部极大,从最后一句知道x(1)全局最大, x(4)最小。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第4章数值运算习题 4 及解答1 根据题给的模拟实际测量数据的一组t和)(t y试用数值差分diff或数值梯度gradient指令计算)(ty'曲线绘制y',然后把)(t y和)(t 在同一张图上,观察数值求导的后果。
(模拟数据从prob_data401.mat获得)〖目的〗●强调:要非常慎用数值导数计算。
●练习mat数据文件中数据的获取。
●实验数据求导的后果●把两条曲线绘制在同一图上的一种方法。
〖解答〗(1)从数据文件获得数据的指令假如prob_data401.mat文件在当前目录或搜索路径上clearload prob_data401.mat(2)用diff求导的指令dt=t(2)-t(1);yc=diff(y)/dt; %注意yc的长度将比y短1plot(t,y,'b',t(2:end),yc,'r')(3)用gradent求导的指令(图形与上相似)dt=t(2)-t(1);yc=gradient(y)/dt;plot(t,y,'b',t,yc,'r')grid on〖说明〗● 不到万不得已,不要进行数值求导。
● 假若一定要计算数值导数,自变量增量dt 要取得比原有数据相对误差高1、2个量级以上。
● 求导会使数据中原有的噪声放大。
2 采用数值计算方法,画出dt tt x y x ⎰=0sin )(在]10 ,0[区间曲线,并计算)5.4(y 。
〖提示〗● 指定区间内的积分函数可用cumtrapz 指令给出。
● )5.4(y 在计算要求不太高的地方可用find 指令算得。
〖目的〗● 指定区间内的积分函数的数值计算法和cumtrapz 指令。
● find 指令的应用。
〖解答〗dt=1e-4;t=0:dt:10;t=t+(t==0)*eps;f=sin(t)./t;s=cumtrapz(f)*dt;plot(t,s,'LineWidth',3)ii=find(t==4.5);s45=s(ii)s45 =3 求函数x ex f 3sin )(=的数值积分⎰=π0 )(dx x f s ,并请采用符号计算尝试复算。
〖提示〗● 数值积分均可尝试。
● 符号积分的局限性。
〖目的〗● 符号积分的局限性。
〖解答〗 dx=pi/2000;x=0:dx:pi;s=trapz(exp(sin(x).^3))*dxs =5.1370符号复算的尝试syms xf=exp(sin(x)^3);ss=int(f,x,0,pi)Warning: Explicit integral could not be found.> In sym.int at 58ss =int(exp(sin(x)^3),x = 0 .. pi)4 用quad 求取dx x e x sin 7.15⎰--ππ的数值积分,并保证积分的绝对精度为910-。
〖目的〗● quadl ,精度可控,计算较快。
● 近似积分指令trapz 获得高精度积分的内存和时间代价较高。
〖解答〗%精度可控的数值积分fx=@(x)exp(-abs(x)).*abs(sin(x));format longsq=quadl(fx,-10*pi,1.7*pi,1e-7)sq =1.08784993815498%近似积分算法x=linspace(-10*pi,1.7*pi,1e7);dx=x(2)-x(1);st=trapz(exp(-abs(x)).*abs(sin(x)))*dxst =1.08784949973430%符号积分算法y='exp(-abs(x))*abs(sin(x))'si=vpa(int(y,-10*pi,1.7*pi),16)y =exp(-abs(x))*abs(sin(x))si =1.0878494994129115 求函数5.08.12cos 5.1)5(sin )(206.02++-=t t t e t t f t 在区间]5,5[-中的最小值点。
〖目的〗● 理解极值概念的邻域性。
● 如何求最小值。
● 学习运用作图法求极值或最小值。
● 感受符号法的局限性。
〖解答〗(1)采用fminbnd 找极小值点在指令窗中多次运行以下指令,观察在不同数目子区间分割下,进行的极小值搜索。
然后从一系列极小值点中,确定最小值点。
clearft=@(t)sin(5*t).^2.*exp(0.06*t.*t)+1.8*abs(t+0.5)-1.5*t.*cos(2*t);disp('计算中,把[ -5,5] 分成若干搜索子区间。
')N=input(' 请输入子区间数 N ,注意使N>=1 ?');%该指令只能在指令窗中运行 t t=linspace(-5,5,N+1);f or k=1:N[tmin(k),fobj(k)]=fminbnd(ft,tt(k),tt(k+1));e nd[fobj,ii]=sort(fobj); %将目标值由小到大排列t min=tmin(ii); %使极小值点做与目标值相应的重新排列fobj,tmin(2)最后确定的最小值点在10,,2,1 =N 的不同分割下,经观察,最后确定出最小值点是 -1.28498111480531相应目标值是 -0.18604801006545(3)采用作图法近似确定最小值点(另一方法)(A )在指令窗中运行以下指令:clearft=@(t)sin(5*t).^2.*exp(0.06*t.*t)+1.8*abs(t+0.5)-1.5*t.*cos(2*t);t=-5:0.001:5;ff=ft(t);plot(t,ff)grid on,shg(B )经观察后,把最小值附近邻域放到足够大,然后运行以下指令,那放大图形被推向前台,与此同时光标变为“十字线”,利用它点击极值点可得到最小值数据[tmin2,fobj2]=ginput(1)tmin2 =-1.28500000993975fobj2 =-0.18604799369136出现具有相同数值的刻度区域表明已达最小可分辨状态(4)符号法求最小值的尝试syms tfts=sin(5*t)^2*exp(0.06*t*t)-1.5*t*cos(2*t)+1.8*abs(t+0.5);dfdt=diff(fts,t); %求导函数tmin=solve(dfdt,t) %求导函数的零点fobj3=subs(fts,t,tmin) %得到一个具体的极值点tmin =-.60100931947716486053884417850955e-2fobj3 =.89909908144684551670208797723124〖说明〗●最小值是对整个区间而言的,极小值是对邻域而言的。
●在一个区间中寻找最小值点,对不同子区间分割进行多次搜索是必要的。
这样可以避免把极小值点误作为最小值点。
最小值点是从一系列极小值点和边界点的比较中确定的。
●作图法求最小值点,很直观。
假若绘图时,自变量步长取得足够小,那么所求得的最小值点有相当好的精度。
●符号法在本例中,只求出一个极值点。
其余很多极值点无法秋初,更不可能得到最小值。
6 设0)0(,1)0(,1)(2)(3)(22===+-dtdy y t y dt t dy dt t y d ,用数值法和符号法求5.0)(=t t y 。
〖目的〗● 学习如何把高阶微分方程写成一阶微分方程组。
● ode45解算器的导数函数如何采用匿名函数形式构成。
● 如何从ode45一组数值解点,求指定自变量对应的函数值。
〖解答〗(1)改写高阶微分方程为一阶微分方程组令dtt dy t y t y t y )()(),()(21==,于是据高阶微分方程可写出 ⎪⎩⎪⎨⎧++-==1)(3)(2)()()(21221t y t y dtt dy t y dt t dy(2)运行以下指令求y(t)的数值解format longts=[0,1];y0=[1;0];dydt=@(t,y)[y(2);-2*y(1)+3*y(2)+1]; %<4> %匿名函数写成的ode45所需得导数函数[tt,yy]=ode45(dydt,ts,y0);y_05=interp1(tt,yy(:,1),0.5,'spline'), %用一维插值求y(0.5)y_05 =0.78958020790127(3)符号法求解syms t;ys=dsolve('D2y-3*Dy+2*y=1','y(0)=1,Dy(0)=0','t')ys_05=subs(ys,t,sym('0.5'))ys =1/2-1/2*exp(2*t)+exp(t)ys_05 =.78958035647060552916850705213780〖说明〗● 第<4>条指令中的导数函数也可采用M 函数文件表达,具体如下。
function S=prob_DyDt(t,y)S=[y(2);-2*y(1)+3*y(2)+1];7 已知矩阵A=magic(8),(1)求该矩阵的“值空间基阵”B ;(2)写出“A 的任何列可用基向量线性表出”的验证程序(提示:利用rref 检验)。
〖目的〗● 体验矩阵值空间的基向量组的不唯一性,但它们可以互为线性表出。
● 利用rref 检验两个矩阵能否互为表出。
〖解答〗(1)A的值空间的三组不同“基”A=magic(8); %采用8阶魔方阵作为实验矩阵[R,ci]=rref(A);B1=A(:,ci) %直接从A中取基向量B2=orth(A) %求A值空间的正交基[V,D]=eig(A);rv=sum(sum(abs(D))>1000*eps); %非零特征值数就是矩阵的秩B3=V(:,1:rv) %取A的非零特征值对应的特征向量作基B1 =64 2 39 55 5417 47 4640 26 2732 34 3541 23 2249 15 148 58 59B2 =-0.3536 0.5401 0.3536-0.3536 -0.3858 -0.3536-0.3536 -0.2315 -0.3536-0.3536 0.0772 0.3536-0.3536 -0.0772 0.3536-0.3536 0.2315 -0.3536-0.3536 0.3858 -0.3536-0.3536 -0.5401 0.3536B3 =0.3536 0.6270 0.39130.3536 -0.4815 -0.24580.3536 -0.3361 -0.10040.3536 0.1906 -0.04510.3536 0.0451 -0.19060.3536 0.1004 0.33610.3536 0.2458 0.48150.3536 -0.3913 -0.6270(2)验证A的任何列可用B1线性表出B1_A=rref([B1,A]) %若B1_A矩阵的下5行全为0,%就表明A可以被B1的3根基向量线性表出B1_A =1 0 0 1 0 0 1 1 0 0 10 1 0 0 1 0 3 4 -3 -4 70 0 1 0 0 1 -3 -4 4 5 -70 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0B2_A=rref([B2,A])B2_A =Columns 1 through 71.0000 0 0 -91.9239 -91.9239 -91.9239 -91.92390 1.0000 0 51.8459 -51.8459 -51.8459 51.84590 0 1.0000 9.8995 -7.0711 -4.2426 1.41420 0 0 0 0 0 00 0 0 0 0 0 00 0 0 0 0 0 00 0 0 0 0 0 00 0 0 0 0 0 0Columns 8 through 11-91.9239 -91.9239 -91.9239 -91.923951.8459 -51.8459 -51.8459 51.8459-1.4142 4.2426 7.0711 -9.89950 0 0 00 0 0 00 0 0 00 0 0 00 0 0 0B3_A=rref([B3,A])B3_A =Columns 1 through 71.0000 0 0 91.9239 91.9239 91.9239 91.92390 1.0000 0 42.3447 -38.1021 -33.8594 29.61680 0 1.0000 12.6462 -16.8889 -21.1315 25.37410 0 0 0 0 0 00 0 0 0 0 0 00 0 0 0 0 0 00 0 0 0 0 0 00 0 0 0 0 0 0Columns 8 through 1191.9239 91.9239 91.9239 91.923925.3741 -21.1315 -16.8889 12.646229.6168 -33.8594 -38.1021 42.34470 0 0 00 0 0 00 0 0 00 0 0 00 0 0 0〖说明〗●magic(n)产生魔方阵。